(Л
ел
о
Од
о ;о ел
Сн1а нинний Hpufop
3150
го корпуса гидронасоса, микроконтроллер 12 с буферным блоком, электродвигатель 14 с усилителем 15 моп;ности и редуктором 16, Для достижения цели устр-во имеет задатчик 17 положения поворотного Корпуса гидронасоса,контактный элемент 18, генератор 19 импульсов, фазовые детекторы 20 и 21, элементы И 22 и 24, элементы И-НЕ 25 и 23, блок 26 индикации момента выхода на заданную скорость и элемент НЕ 7. Скорость вращения барабана 4 автоматически регулируется изменением угла наклона поворотного корпуса гидронасоса 1. При возможности аварийной ситуации оператор переходит на ручной режим и задает при помощи задатчпка 17 угол, отрабатываемый электродпигателем 14о Сигнал рассог- ласования датчика 11 и задатчика 17
с выхода элемента И 24 поступает на блок 26. Оператор перемещает рычаг задатчика 17 и одновременно нажимает кнопку элемента 18, разрешая прохождение сигнала с генератора 19 через элемент И-НЕ 25 и элемент И 22 на усилитель 15, Вращение вала электродвигателя 14 осуп1ествляется до равенства нулю сигнала рассогласования на выходе элемента И 24„ Срабатывает световая индикация в блоке 26.Оператор отпускает кнопку элемента 18, и устр-во переходит в автоматический режим поддержания заданной скорости с помощью микроконтроллера 12„Подъемник позволяет существенно уменьшить время установления заданной скорости в ручном и автоматическом режимах работы, упростить работу оператора по проведению каротажных работ. 1 ил.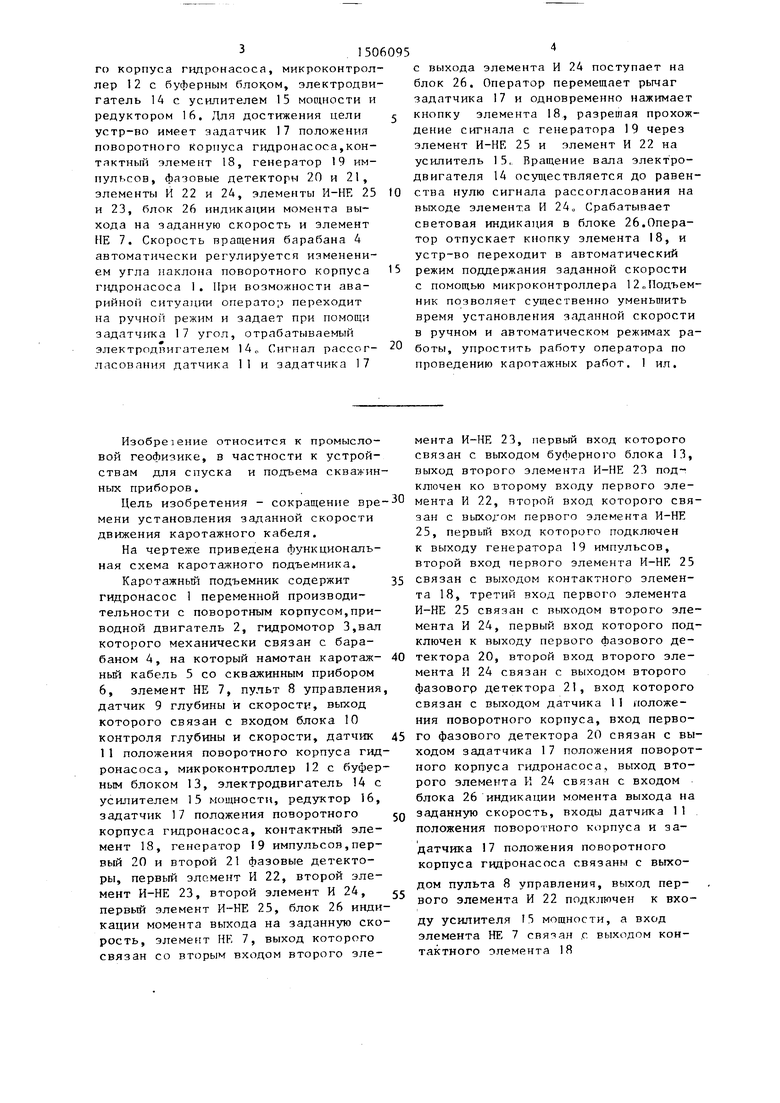


| название | год | авторы | номер документа |
|---|---|---|---|
| Каротажный подъемник | 1986 |
|
SU1448034A1 |
| УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА СКВАЖИННЫХ ПРИБОРОВ | 1994 |
|
RU2087668C1 |
| Каротажный подъемник | 1989 |
|
SU1654557A1 |
| КАРОТАЖНЫЙ ПОДЪЕМНИК | 2001 |
|
RU2179636C1 |
| Устройство для управления каротажным подъемником | 1988 |
|
SU1548420A1 |
| СИСТЕМА ДИАГНОСТИРОВАНИЯ ГИДРОПРИВОДА | 2001 |
|
RU2187723C1 |
| МОБИЛЬНАЯ КАРОТАЖНАЯ ЛЕБЕДКА | 2000 |
|
RU2191741C2 |
| Система автоматического управления трубогибочным станом | 1987 |
|
SU1505624A1 |
| Мобильная радиолокационная станция | 2017 |
|
RU2662447C1 |
| Устройство для управления перемоткой длинномерного материала | 1987 |
|
SU1461738A1 |
Изобретение относится к горному делу. Цель - сокращение времени установления заданной скорости движения каротажного кабеля. Устройство содержит гидронасос 1 переменной производительности с поворотным корпусом, связанный с приводным двигателем 2 и гидромотором 3, барабан 4, кабель 5 со скважинным прибором 6, пульт 8 управления, датчик 9 глубины и скорости, блок 10 контроля глубины и скорости, датчик 11 положения поворотного корпуса гидронасоса, микроконтролер 12 с буферным блоком, электродвигатель 14 с усилителем 15 мощности и редуктором 16. Для достижения цели устройство имеет задатчик 17 положения поворотного корпуса гидронасоса, контактный элемент 18, генератор 19 импульсов, фазовые детекторы 20 и 21, элементы И 22 и 24, элементы И-НЕ 25 и 23, блок 26 индикации момента выхода на заданную скорость и элемент НЕ 7. Скорость вращения барабана 4 автоматически регулируется изменением угла наклона поворотного корпуса гидронасоса 1. При возможности аварийной ситуации оператор переходит на ручной режим и задает при помощи задатчика 17 угол, отрабатываемый электродвигателем 14. Сигнал рассогласования датчика 11 и задатчика 17 с выхода элемента И 24 поступает на блок 26. Оператор перемещает рычаг задатчика 17 и одновременно нажимает кнопку элемента 18, разрешая прохождение сигнала с генератора 19 через элемент И-НЕ 25 и элемент И 22 на усилитель 15. Вращение вала электродвигателя 14 осуществляется до равенства нулю сигнала рассогласования на выходе элемента И 24. Срабатывает световая индикация в блоке 26. Оператор отпускает кнопку элемента 18, и устройство переходит в автоматический режим поддержания заданной скорости с помощью микроконтролера 12. Подъемник позволяет существенно уменьшить время установления заданной скорости в ручном и автоматическом режимах работы, упростить работу оператора по проведению каротажных работ. 1 ил.
Изобре1ение относится к промысловой геофизике, в частности к устройствам для спуска и подъема скважин- ных приборов.
Цель изобретения - сокращение времени установления заданной скорости движения каротажного кабеля.
На чертеже приведена функциональная схема каротажного подъемника.
Каротажный подъемник содержит гидронасос 1 переменной производительности с поворотным корпусом,приводной двигатель 2, гидромотор 3,вал которого механически связан с барабаном 4, на который намотан каротаж- ный кабель 5 со скважинным прибором 6, элемент НЕ 7, пульт 8 управления, датчик 9 глубины и скорости, выход которого связан с входом блока 10 контроля глубины и скорости, датчик 11 положения поворотного корпуса гидронасоса, микроконтроллер 12 с буферным блоком 13, электродвигатель 14 с усилителем 15 мощности, редуктор 16, задатчик 17 положения поворотного корпуса гидронасоса, контактный элемент 18, генератор 19 импульсов,первый 20 и второй 21 фазовые детекторы, первый элемент И 22, второй элемент И-НЕ 23, второй элемент И 24, первый элемент И-НЕ 25, блок 26 индикации момента выхода на заданную скорость, элемент НЕ 7, выход которого связан со вторым входом второго элемента И-НЕ 23, первый вход которого связан с выходом буферного блока 13, выход второго элемента И-НЕ 23 подключен ко второму входу первого элемента И 22, второй вход которого связан с выходом первого элемента И-НЕ 25, первый вход которого подключен к выходу генератора 19 импульсов, второй вход первого элемента И-НЕ 25 связан с выходом контактного элемента 18, третиР вход первого элемента И-НЕ 25 связан с выходом второго элемента И 24, первый вход которого подключен к выходу первого фазового детектора 20, второй вход второго элемента И 24 связан с вь ходом второго фазового детектора 21, вход которого связан с выходом датчика 11 положения поворотного корпуса, вход первого фазового детектора 20 связан с выходом задатчика 17 положения поворотного корпуса гидронасоса, выход второго элемента И 24 связан с входом блока 26 индикации момента выхода на заданную скорость, входы датчика 11 положения поворотного корпуса и задатчика 17 положения поворотного корпуса гидронасоса связаны с выходом пульта 8 управления, выход первого элемента И 22 подключен к входу усилителя 15 мощности, а вход элемента НЕ 7 связан .с выходом контактного элемента 18
Каротажный подъе1-шик работает следующим образом.
При выполнении каротажных работ на глубинах, представляющих опасность возникновения аварийных ситуаций на скважине, оператор переходит из автоматического в режим ручного управления спуско-подъемными операциями 10
Оператор каротажного подъемника С помощью задагчика 17 положения поворотного корпуса гидронасоса,выполненного в виде сельсина, работающего в индикаторном режиме, задает 15 угол, который должен быть отработан исполнительным механизмом, а именно электродвигателем 14, который через редуктор 16 связан с поворотным корпусом гидронасоса 1,20
Поворотный корпус гидронасоса 1 К1шематически связан с датчиком 11 положения поворотного корпуса гидронасоса, также выполненного в виде сельсина, работающего в индикаторном 25 режиме о Задатчик 17 и датчик 11 положения поворотного корпуса гидронасоса образуют индикаторную систему синхронной связи для дистанционной передачи угла,30
Обмотки возбуждения обоих сельсинов задатчика 17 и датчика 11 подключаются к цепи питания, находящейся на пульте 8 управления каротажным подъемником о Сигналы, снимаемые с об- 35 моток роторов сельсинов через первый 20 и второй 21 фазовые детекторы,поступают на первый и второй входы второго элемента И 24, на выходе которого формируется сигнал рассогласования, величина которого пропоргщональ- на разности углов положения роторов задатчика 17 и датчика 11 положения поворотного корпуса гидронасоса 1„
Сигнал рассогласования с выхода второго элемента И 24 поступает на блок 26 ттдика1ди; момента выхода на заданную скорость и третий вход первого элемента И-НЕ 25,
50
ность с выхода генератора 19 импульсов .
Постоянная частота с выхода первого элемента И-НЕ 25 поступает на второй вход первого элемента И 22,на первый вход которого поступает положительный потенциал с выхода второго элемента И-НЕ 23, который присутствует там во время работы в ручном режиме. Частота с выхода первого элемента И 22 проходит на вход усилителя 15 мощности, с выхода которого поступает на обмотки электродвигателя 14,
Вал электродвигателя 14 через редуктор 16 кинематически связан с поворотным корпусом гидронасоса 1.Та- кш-i образом, вращение вала электродвигателя 14 меняет наклон поворотного корпуса гидронасоса 1 ,
Вал поворотного корпуса гидронасоса 1 жестко связан с валом ротора датчика 11 положения поворотного корпуса.
Величина подачи рабочей жидкости в гидросистеме каротажного подъемника зависит от угла наклона поворотного корпуса гидронасоса 1, Гидравлический сервомеханизм, содержащий гидронасос 1 с гидромотором 3,предназначается для управления вращательным движением барабана 4.
Направление и велкчина расхода на выходе гидронасоса 1 регулируется изменением наклона поворотного корпуса гидронасоса 1 о Посредством гидромотора 3 расход и давление преоб- Q разуется в скорость вращения и момент на выходном валу гидромотора 3, который связан с барабаном 4.
Вращение вала электродвигателя 14 осуществляется до тех пор, пока сигнал рассогласования на выходе второго элемента И 24 не стан.т равным нулю. В этот момент происходит совпадение заданной и измеренной скоростей движения каротажного кабелгя 5, загорается световая индикация момента выхода на заданную скорость и оператор отпускает кнопку контактного элемента 18о На втором входе первого элемента И-НЕ 25 устанавливается ну45
Оператор каротажного подъемника, перемещая рычаг задатчика 17 положения поворотного корпуса, одновременно нажимает кнопку контактного элемента 18, При этом положительный потен- . левой потенциал, а на втором входе циап с его выхода поступает на второй второго элемента И-НЕ 23 установит- вход первого элемента И-НЕ 25, На ся положительный потенциал. С этого первый вход первого элемента И-НЕ 25 момента прекращается ручной режим поступает импульсная последователь- регулирования скорости и система упность с выхода генератора 19 импульсов .
Постоянная частота с выхода первого элемента И-НЕ 25 поступает на второй вход первого элемента И 22,на первый вход которого поступает положительный потенциал с выхода второго элемента И-НЕ 23, который присутствует там во время работы в ручном режиме. Частота с выхода первого элемента И 22 проходит на вход усилителя 15 мощности, с выхода которого поступает на обмотки электродвигателя 14,
Вал электродвигателя 14 через редуктор 16 кинематически связан с поворотным корпусом гидронасоса 1.Та- кш-i образом, вращение вала электродвигателя 14 меняет наклон поворотного корпуса гидронасоса 1 ,
Вал поворотного корпуса гидронасоса 1 жестко связан с валом ротора датчика 11 положения поворотного корпуса.
Величина подачи рабочей жидкости в гидросистеме каротажного подъемника зависит от угла наклона поворотного корпуса гидронасоса 1, Гидравлический сервомеханизм, содержащий гидронасос 1 с гидромотором 3,предназначается для управления вращательным движением барабана 4.
Направление и велкчина расхода на выходе гидронасоса 1 регулируется изменением наклона поворотного корпуса гидронасоса 1 о Посредством гидромотора 3 расход и давление преоб- разуется в скорость вращения и момент на выходном валу гидромотора 3, который связан с барабаном 4.
Вращение вала электродвигателя 14 осуществляется до тех пор, пока сигнал рассогласования на выходе второго элемента И 24 не стан.т равным нулю. В этот момент происходит совпадение заданной и измеренной скоростей движения каротажного кабелгя 5, загорается световая индикация момента выхода на заданную скорость и оператор отпускает кнопку контактного элемента 18о На втором входе первого элемента И-НЕ 25 устанавливается ну
левой потенциал, а на втором входе второго элемента И-НЕ 23 установит- ся положительный потенциал. С этого момента прекращается ручной режим регулирования скорости и система управления начинает автоматически отра батьшать программу, занесенную оператором в запоминающее устройство микроконтроллера При этом, информация о глубине, скорости и направлении движения кабеля по шине данных поступает в микроконтроллер 12,где она анализируется. На основании чег формируются необходимые сигналы управления и регулирования.
Ручной режим работы применяется оператором каротажного подъемника каждый раз при прохождении каротажным снарядом глубин, представляющих опасность аварийной остановкИо Это может быть забой и устье скважины, нижний конец обсадной колонны и т.До
Предлагаемый каротажный подъемни позволяет существенно уменьшить время установления заданной скорости как в ручном, так и автоматическом режимах работы, а также существенно упрощает работу оператора по проведению спуско-подъемных операци каротажного снаряда.
Формула изобретения 30
Каротажный подъемник, содержащий гидронасос переменной производительности с поворотным корпусом, связанный с приводным двигателем и гидромо- тором, соединенным с барабаном,кабель со скважинным прибором, пульт управления, датчик глубины и скорости, соединенный с блоком контроля глубины и скорости, датчик положения пово-40 ротного корпуса гидронасоса,подключен0
5
0
0
0 5
ный через шину данных к микроконтроллеру с буферным блоком, злектродвига- тель с усилителем мощности и редуктором, генератор импульсов, первый и второй элементы И, отличающийся тем, что, с целью сокращения времени установления заданной скорости движения каротажного кабеля, он снабжен задатчиком положения поворотного корпуса гидронасоса,контактным элементом, первым и вторым фазовым детекторами, первым и вторым элементами И-НЕ, блоком индикации момента выхода на заданную скорость и элементом НЕ, причем выход пульта управления соединен с входом датчика положения поворотного корпуса гидронасоса и входом задатчика положения поворотного корпуса гидронасоса,выход которого через первый фазовый детектор подключен к первому входу второго элемента И, второй вход которого соединен через второй фазовый детектор с выходом датчика положения поворотного корпуса гидронасоса, а выход подключен к блоку индикации момента выхода на заданную скорость и третьему входу первого элемента И-НЕ, первьт вход которого соединен с генератором импульсов, второй вход подключен к контактному элементу и входу элемента НЕ, выход которого соединен с вторым входом второго элемента И-НЕ, первый вход которого подключен к выходу буферного блока, а выход соединен с первым входом первого элемента И, второй вход которого подключен к выходу первого элемента И-НЕ, а выход соединен с усилителем мощности.
| Каротажный подъемник | 1986 |
|
SU1448034A1 |
