Изобретение относится к области ракетной техники и может быть использовано при комплексном полунатурном моделировании функционирования авиационных и космических объектов, в частности для динамической отработки бортовых систем управления в автоматизированном режиме.
Известно устройство автоматизированного наземного контроля ракеты по патенту RU №2231732, 7 F41G 7/00, 2003.11.11, включающее управляемую ракету с головкой самонаведения, автоматизированный комплекс проверочной аппаратуры, измерительное устройство ответных реакций. Указанное техническое решение не позволяет проводить динамической отработки бортовых систем управления активных и полуактивных головок наведения.
Известен испытательный стенд по патенту RU №2207485, 7 F 41 G 3/26, 2002.11.01, содержащий головку наведения, отражательный экран и радиоимитатор цели, включающий излучатель сигналов. Отражательный экран установлен перед радиоимитатором цели, находящимся в фокусе экрана, а головка наведения смещена относительно радиоимитатора цели. Этот испытательный стенд выбран в качестве прототипа.
Недостатком этого испытательного стенда является то, что головка наведения смещена относительно радиоимитатора цели, поэтому при перемещении сигнала по сфере меняется расстояние его прохождения после отражения до приемника. Появляется систематическая ошибка, которую необходимо учитывать. Решение задачи учета систематической ошибки осложняется при одновременной работе по нескольким целям. Также сфера требует высокой точности обработки. Кроме того, указанный испытательный стенд не позволяет проводить динамическую отработку бортовых систем управления в автоматизированном режиме.
Таким образом, предложенное изобретение решает задачи по обеспечению динамической отработки бортовых систем управления при комплексном полунатурном моделировании функционирования авиационных и космических объектов в автоматизированном режиме, а также по учету систематической ошибки, которая осложняется при одновременной работе по нескольким целям. Кроме того, полусфера не требует высокой точности обработки и может быть изготовлена из пластиковых сегментов.
Решение указанных задач достигается тем, что в известный испытательный стенд, содержащий головку наведения и радиоимитатор цели, включающий излучатель сигналов, введен динамический стенд воспроизведения углового движения головки наведения, а радиоимитатор цели дополнительно содержит последовательно соединенные блок управления полунатурного моделирования функционирования головки наведения, вход которого подключен к выходу динамического стенда воспроизведения углового движения головки наведения, блок передачи сигналов управления платформой и определения ее местонахождения, блок приема сигналов управления платформой и определения ее местонахождения и электропривод платформы, две платформы, колеса платформ с приводом и полусферу, при этом колеса платформ с приводом выполнены из магнитного материала, полусфера - из магнитопроницаемого материала, а платформы расположены по обе стороны полусферы с зеркальной симметрией друг относительно друга и прижаты магнитным притяжением (например, магнитных колес) друг к другу.
Сущность предлагаемого изобретения заключается в том, что радиоимитатор цели снабжен двумя платформами по обе стороны полусферы с зеркальной симметрией друг относительно друга и прижаты магнитным притяжением друг к другу. На платформе, расположенной с внешней стороны полусферы, установлены последовательно соединенные блок приема сигналов управления платформой и определения ее местоположения и электропривод платформы, а также колеса платформы с приводом. Платформа способна осуществлять движение по полусфере в любом направлении.
На чертеже приведена структурная схема предлагаемого испытательного стенда.
Рассмотрим пример конкретного осуществления изобретения.
Предлагаемый испытательный стенд содержит динамический стенд воспроизведения углового движения головки наведения 1, головку наведения 2 и радиоимитатор цели 3, который состоит из двух платформ 4, блока приема сигналов управления платформой и определения ее местоположения 5, блока управления полунатурного моделирования функционирования головки наведения 6, блока передачи сигналов управления платформой и определения ее местонахождения 7, колес платформ с приводом 8, излучателя сигналов 9, электропривода платформы 10 и полусферы 11.
Испытательный стенд функционирует следующим образом. Головку наведения 2, включающую реальную аппаратуру бортового комплекса управления и автопилот, устанавливают на динамический стенд воспроизведения углового движения головки наведения 1. Антенна головки наведения 2 направлена на радиоимитатор цели 3. Излучатель сигналов 9 излучает сигнал в сторону головки наведения 2, при этом при моделировании различных ситуаций сигнал может иметь различные частоты, скважность, поляризацию и амплитуду. Блок управления полунатурного моделирования функционирования головки наведения 6, который может быть реализован, например, на базе персонального компьютера или иной электронно-вычислительной машины, выдает команду управления перемещением платформы 4 на блок передачи сигналов управления платформой и определения ее местоположения 7, в котором и формируется сигнал управления перемещением, который поступает на блок приема сигналов управления платформой и определения ее местоположения 5, расположенный на платформе 4 с наружной стороны полусферы 11, а затем на электропривод платформы 10, который и осуществляет перемещение платформы 4 с помощью колес платформ с приводом 8. Таким образом, происходит перемещение платформ 4, соответственно и излучателя сигналов 9 по полусфере 11 в двух направлениях по заданной программе, возможно и с ускорениями. Таким образом, имитируется перемещение цели. На чертеже изображены три положения платформы 4 а, б, в - верх, центр, низ соответственно.
Головка наведения 2 принимает излученный сигнал и с помощью динамического стенда воспроизведения углового движения головки наведения 1 происходит отслеживание головкой наведения 2 перемещения излучателя сигналов 9. Контроль за перемещением платформ 4 осуществляется с помощью блока приема сигналов управления платформой и определения ее местоположения 5 и блока передачи сигналов управления платформой и определения ее местоположения 7, методы реализации указанных блоков 5 и 7, в частности определяющих местоположения платформ 4, известны, см., например, "Автоматизированный электропривод промышленных установок". Под общ.ред. Г.Б.Онищенко. - М.: РАСХН, 2001г., стр. 203-358. Также возможна реализация этих блоков по принципу построения широко используемых в компьютерной технике устройств, так называемые оптические "мыши". Обзор по таким устройствам представлен, например, в Интернете, сайт http:// www. mycomp. com. ya/ 2003г. Сигнал с выхода динамического стенда воспроизведения углового движения головки наведения 1 поступает на вход блока управления полунатурного моделирования функционирования головки наведения 6, реализуя обратную связь, необходимую при анализе результатов испытаний головки наведения 2, в том числе и динамических испытаний, см., например, упомянутую ранее книгу под общ. ред. Г.Б.Онищенко, стр.286-305.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2610877C1 |
| СТЕНД ДЛЯ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2338992C1 |
| СТЕНД ДЛЯ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2637096C2 |
| Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом с радиолокационным визиром | 2015 |
|
RU2629709C2 |
| ДВУХСТЕПЕННОЙ ДИНАМИЧЕСКИЙ ИМИТАТОР ЦЕЛЕЙ | 2005 |
|
RU2273890C1 |
| РАДИОИМИТАТОР ЦЕЛЕЙ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2007 |
|
RU2349862C2 |
| Стенд полунатурного моделирования движения летательного аппарата с цифровой системой управления | 2022 |
|
RU2786280C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ИСПЫТАНИЙ РАДИОЛОКАЦИОННЫХ СИСТЕМ С ИСПОЛЬЗОВАНИЕМ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2723157C1 |
| Способ полунатурных роботизированных исследований и испытаний систем управления беспилотных воздушных судов вертикального взлета и посадки (БВС ВВП) | 2021 |
|
RU2771692C1 |
| СПОСОБ И КОМПЛЕКС ОЦЕНКИ НА ПОЛУНАТУРНОЙ МОДЕЛИ ЭФФЕКТИВНОСТИ РАДИОПОДАВЛЕНИЯ РАДИОЛОКАЦИОННОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2018 |
|
RU2695496C1 |
Изобретение относится к области ракетной техники и может быть использовано при комплексном полунатурном моделировании функционирования авиационных и космических объектов. Сущность изобретения заключается в том, что испытательный стенд содержит головку наведения, динамический стенд воспроизведения углового движения головки наведения и радио-имитатор цели, который снабжен двумя платформами, расположенными по обе стороны полусферы с зеркальной симметрией друг относительно друга и прижатыми магнитным притяжением друг к другу. Платформы способны осуществлять движение по полусфере в любом направлении. Траекторию движения платформ определяет блок управления полунатурного моделирования функционирования головки наведения. На платформе, расположенной на внутренней стороне полусферы, расположен излучатель сигнала, излучающий сигнал в сторону головки наведения. Таким образом, имитируется перемещение цели. Головка наведения принимает излученный сигнал и с помощью динамического стенда воспроизведения углового движения головки наведения происходит отслеживание перемещения излучателя, которое затем анализируется. Реализация изобретения позволяет уменьшить трудоемкость, материалоемкость при изготовлении стенда, а также упростить его работу. 1 ил.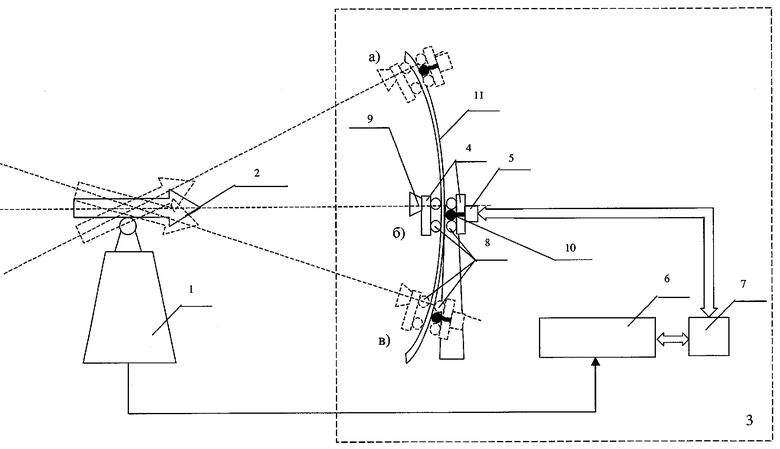
Испытательный стенд, содержащий головку наведения и радиоимитатор цели, включающий излучатель сигналов, отличающийся тем, что введен динамический стенд воспроизведения углового движения головки наведения, а радиоимитатор цели дополнительно содержит последовательно соединенные блок управления полунатурного моделирования функционирования головки наведения, вход которого подключен к выходу динамического стенда воспроизведения углового движения головки наведения, блок передачи сигналов управления платформой и определения ее местоположения, блок приема сигналов управления платформой и определения ее местоположения и электропривод платформы, две платформы, колеса платформ с приводом и полусферу, при этом колеса платформ с приводом выполнены из магнитного материала, полусфера - из магнитопроницаемого материала, а платформы расположены по обе стороны полусферы с зеркальной симметрией относительно друг друга и прижаты магнитным притяжением друг к другу.
| ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2002 |
|
RU2207485C1 |

