Предлагаемое изобретение относится к области гироскопической техники и предназначено для контроля системы горизонтирования самоориентирующейся системы гирокурсокреноуказания и исключения включения режима гирокомпасирования при погрешностях горизонтирования, превышающих допустимые.
В настоящее время для систем навигации и решения задач целеуказания в качестве первичных датчиков информации об углах наклона и курса наземного самоходного объекта (НСО) нашли широкое применение самоориентирующиеся системы гирокурсокреноуказания (в дальнейшем система).
Современные системы, кроме измерения углов наклона объекта и хранения опорного направления движения объекта, решают задачу определения на стоянках направления географического меридиана (истинного азимута объекта), что особенно необходимо при решении задач целеуказания, топопривязки и навигации НСО.
Ближайшим аналогом, выбранным за прототип предлагаемого изобретения, является самоориентирующаяся система гирокурсокреноуказания [1]. Система сконструирована по схеме индикаторно-силовой курсовертикали на базе динамически настраиваемых вибрационных гироскопов.
Одним из основных факторов, определяющих точность определения истинного азимута объекта, кроме собственного случайного дрейфа гироскопа, является точность горизонтирования платформы, на которой установлен курсовой гироблок. Поскольку погрешность горизонтирования непосредственно входит в ошибку определения истинного азимута объекта, к системе горизонтирования представляются жесткие требования по точности, которая должна быть не ниже допустимой. Однако при эксплуатации существует вероятность, когда погрешность горизонтирования превышает допустимую. Особенно эта вероятность увеличивается при предельных отрицательных температурах, когда резко возрастают моменты по осям бикарданова подвеса. В этом случае погрешность определения истинного азимута превышает допустимую и, как следствие, приводит к снижению точности решения задач навигации, топопривязки и целеуказания.
В существующих самоориентирующихся системах гирокурсокреноуказания контроль погрешности системы горизонтирования при эксплуатации проводится только при проведении регламентных работ, которые проводятся не чаще одного раза в полгода. Этот контроль сводится к сравниванию показаний выходных датчиков информации системы по углам наклона с показаниями оптических квадрантов. Однако периодическое проведение регламентных работ не исключает при эксплуатации системы вероятность превышения погрешности горизонтирования выше допустимой.
В отдельных случаях при больших погрешностях горизонтирования или выхода из строя всей системы горизонтирования появляется необходимость отключения гироузлов курсового блока и гирогоризонта с целью исключения поломки прецизионных гироузлов. В частности, для динамически настраиваемых вибрационных гироскопов таким слабым местом является торсионный подвес ротора гироскопа.
Предлагаемое изобретение направлено на повышение надежности системы обеспечения точностных характеристик курсового канала и исключения механических поломок прецизионных гироузлов.
Это достигается тем, что в систему, содержащую бикарданов подвес, состоящий из внутренней и наружной рам, по осям которых установлены двигатели стабилизации и датчики выходной информации по углам наклона, на внутренней раме подвеса установлены чувствительные элементы горизонта, измерительные оси которых соосны с соответствующими осями бикарданова подвеса, курсовой гироблок с датчиком выходной информации по углу курса, гироблок системы горизонтирования, введены два пороговых устройства с низким опорным напряжением, два пороговых устройства с высоким опорным напряжением и два логических устройства ИЛИ, при этом выход каждого чувствительного элемента горизонта подключен к входам параллельно соединенных пороговых устройств с низким и высоким опорными напряжениями, выходы пороговых устройств с низким пороговым напряжением подключены к входам одного логического устройства ИЛИ, а выходы пороговых устройств с высоким опорным напряжением подключены к входам другого логического устройства ИЛИ, выходы логических устройств ИЛИ являются входами бортовой вычислительной машины.
На чертеже представлена функционально-кинематическая схема самоориентирующейся системы гирокурсокреноуказания с устройством встроенного контроля.
Сведения, подтверждающие возможность осуществления изобретения с достижением вышеуказанного технического результата, заключаются в следующем: предлагаемая система содержит бикарданов подвес, состоящий из наружной 1 и внутренней 2 рам, по осям которых установлены двигатели стабилизации 3, 4 и датчики выходной информации 5, 6 по углам наклона. На внутренней раме 2 (платформе) установлены чувствительные элементы горизонта 7, 8, являющиеся датчиками первичной информации горизонтальной коррекции, измерительные оси которых соосны с соответствующими осями бикарданова подвеса. На внутренней же раме 2 установлены курсовой гироблок 9 с датчиком выходной информации по углу курса 10 и гироблок системы горизонтирования 11.
Курсовой гироблок 9 работает в двух режимах: в режиме определения истинного азимута на стоянках и режиме хранения направления истинного азимута при движении объекта.
В систему введено устройство встроенного контроля системы горизонтирования, содержащее два пороговых устройства с низким опорным напряжением 12, 13, два пороговых устройства с высоким опорным напряжением 14, 15 и два логических устройства ИЛИ 16, 17, при этом выходы каждого чувствительного элемента горизонта 7, 8 подключены к входам параллельно соединенных пороговых устройств с низким и высоким опорными напряжениями 13, 15 и 12, 14 соответственно. Выходы пороговых устройств с низким опорным напряжением 12, 13 подключены к входам одного логического устройства ИЛИ 16, а выходы пороговых устройств с высоким опорным напряжением 14, 15 подключены к входам другого логического устройства ИЛИ 17. Выходы логических устройств 16, 17 подключены к программному устройству бортовой вычислительной машины, управляющему режимами работы системы.
Работа системы с устройством встроенного контроля заключается в следующем: при запуске системы, через временный интервал, равный времени готовности системы горизонтирования, а также при остановках объекта включается устройство встроенного контроля системы горизонтирования. Сигналы чувствительных элементов горизонта 7, 8 параллельно цепи горизонтальной коррекции гироблока системы горизонтирования (функциональные связи и элементы системы горизонтальной коррекции условно не показаны) поступают на входы соответствующих параллельно подключенных пороговых устройств 13, 15 и 12, 14, из которых пороговые устройства 12, 13 с низким опорным напряжением U'ОП, a 14, 15 - с высоким опорным напряжением. Если напряжения UН и UВ с чувствительных элементов горизонта 8, 7 как функции погрешности горизонтирования относительно осей внутренней и наружной рам подвеса не превышают U'ОП, т.е. UВ≤U'ОП, UН≤U'ОП, с пороговых устройств 12, 13 на входы первого логического устройства ИЛИ 16 поступают кодированные сигналы "0". В этом случае с устройства ИЛИ 16 на вход программного устройства управления системой поступает сигнал на разрешение включения режима гирокомпасирования. Если же UН и UВ или хотя бы один из них превысит значение U'ОП, то с пороговых устройств 12, 13 на входы логического устройства ИЛИ 16 поступают кодовые сигналы в следующих комбинациях: "l-l", "1-0", "0-1". При таких комбинациях кодовых сигналов с логического устройства ИЛИ 16 на вход программного устройства поступает сигнал запрета на включение режима гирокомпасирования курсового гироблока. В этом случае курсовой гироблок подключается на режим хранения опорного направления, а азимут объекта для навигационной системы на начальной точке маршрута определяется по ориентирным точкам или другими автономными средствами. Тем самым исключается введение в навигационную систему азимута, погрешности которого превышают погрешности курсового гироблока, работающего в режиме хранения направления.
Если напряжение UН и UВ, поступающие с чувствительных устройств 8, 7, не превышают опорных напряжений U''ОП пороговых устройств 14, 15 соответственно, то на второе логическое устройство ИЛИ 17 поступают кодированные сигналы "0". В этом случае с устройства ИЛИ 17 на вход программного устройства управления системой поступает сигнал разрешения на работу системы в штатном режиме. Если сигналы UН и UВ или хотя бы один из них превысит значение U''ОП, то с пороговых устройств 14, 15 на входы логического устройства ИЛИ 17 поступают кодовые сигналы в следующих комбинациях: "l-l", "1-0", "0-1". При таких сочетаниях сигналов с устройства ИЛИ 17 на вход программного устройства поступает сигнал на отключение питания всей системы, что позволит исключить механические поломки прецизионных узлов системы.
Предложенная система с устройством встроенного контроля позволит, по мнению авторов, исключить режимы гирокомпасирования при погрешностях горизонтирования курсового гироблока выше допустимых, а также исключить механические поломки прецизионных гироузлов при выходе из строя системы горизонтирования.
Источник информации
1. Патент РФ 2124184, приоритет 15.12.1996. БИ 36, 1998 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2192622C1 |
| СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2186339C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2166733C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА В СИСТЕМАХ НАВИГАЦИИ, ТОПОПРИВЯЗКИ, НАВЕДЕНИЯ И ПРИЦЕЛИВАНИЯ (ВАРИАНТЫ) | 2001 |
|
RU2184936C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОДОЛЬНОГО И ПОПЕРЕЧНОГО НАКЛОНОВ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2002 |
|
RU2237867C2 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС (ВАРИАНТЫ) | 2002 |
|
RU2215263C1 |
| ГИРОГОРИЗОНТ ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ДЕФОРМАЦИЙ ОПОР РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 2001 |
|
RU2207508C1 |
| ГИРОГОРИЗОНТ С ДИСКРЕТНОЙ СИСТЕМОЙ ГОРИЗОНТАЛЬНОЙ КОРРЕКЦИИ | 2000 |
|
RU2172473C1 |
Использование: в области гироскопической техники. Сущность изобретения: система представляет собой двухосную горизонтируемую индикаторно-силовую платформу с установленными на ней двухрежимными курсовым гироблоком, блоком гирогоризонта и двумя чувствительными элементами горизонта. Кроме того, система содержит два пороговых устройства с низким опорным напряжением, два пороговых устройства с высоким опорным напряжением и два логических устройства ИЛИ. Выход каждого чувствительного элемента горизонта подключен к входам параллельно соединенных пороговых устройств с низким и высоким опорными напряжениями. Выходы пороговых устройств с низким опорным напряжением подключены к входам одного логического устройства ИЛИ, которое формирует сигнал разрешения или запрета режима гирокомпасирования в зависимости от погрешности горизонтирования платформы. Выходы пороговых устройств с высоким опорным напряжением подключены к входам другого устройства ИЛИ, которое формирует сигнал отключения системы при выходе из строя системы горизонтирования. Технический результат: повышение надежности системы обеспечения точностных характеристик курсового канала и исключения механических поломок прецизионных гироузлов. 1 ил.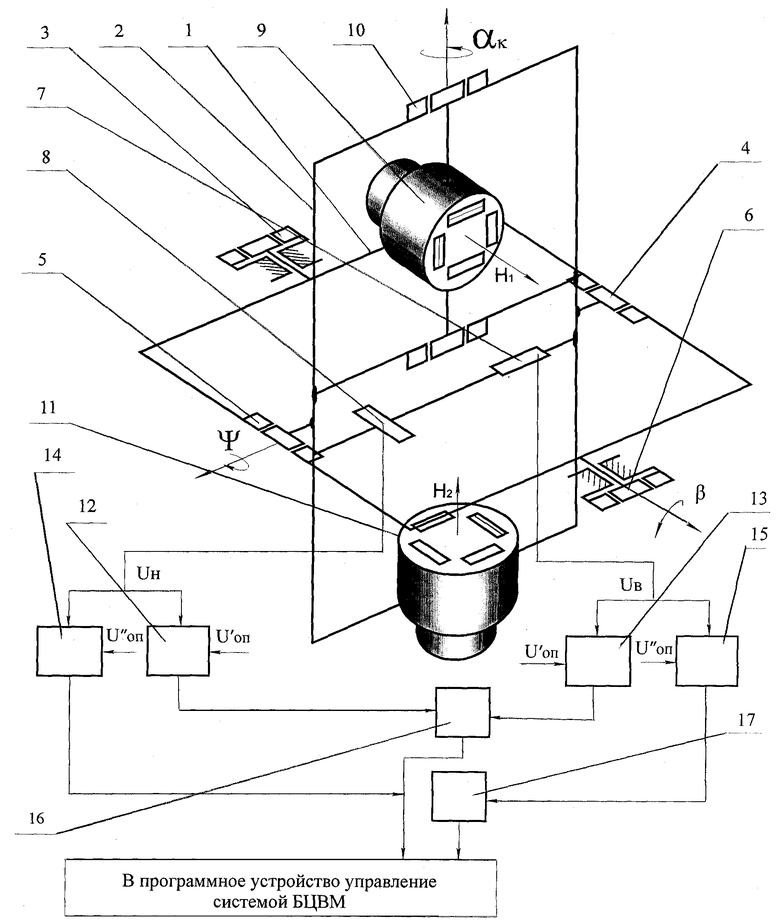
Самоориентирующаяся система гирокурсокреноуказания с устройством встроенного контроля, содержащая бикарданов подвес, состоящий из наружной и внутренней рам, по осям которых установлены двигатели стабилизации и датчики выходной информации по углам наклона, чувствительные элементы горизонта, установленные на внутренней раме подвеса, измерительные оси которых соосны с соответствующими осями бикарданова подвеса, курсовой гироблок с датчиком выходной информации по углу курса, гироблок системы горизонтирования, отличающаяся тем, что в нее введены два пороговых устройства с низким опорным напряжением, два пороговых устройства с высоким опорным напряжением и два логических устройства ИЛИ, при этом выходы каждого чувствительного элемента горизонта подключены к входам параллельно соединенных пороговых устройств с низким и высоким опорными напряжениями, выходы пороговых устройств с низким напряжением подключены к входам одного логического устройства ИЛИ, а выходы пороговых устройств с высоким опорным напряжением подключены к входам другого логического устройства ИЛИ, выходы логических устройств ИЛИ являются входами бортовой вычислительной машины.
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2166733C1 |
| Головка симметричного между вагонного штепсельного соединения для электрических проводов | 1928 |
|
SU13422A1 |
| DE 3019372 A, 26.11.1981 | |||
| Способ приготовления хромового катализатора для деструктивного дегидрирования | 1936 |
|
SU48212A1 |

