Изобретение относится к гироскопической технике и предназначено для использования в системах пространственной стабилизации средств вооружения и обнаружения цели, в системах навигации и топопривязки наземных самоходных объектов (НСО), а также в комплексированных системах определения высоты местонахождения НСО.
В настоящее время в качестве измерителей угла наклона и курса для систем стабилизации и навигации НСО нашли применение гироскопические курсовертикали, комплексированные системы на базе гироскопических датчиков крена и гирокурсоуказателей, стабилизируемых в плоскости горизонта по сигналам с датчика крена, а также системы курсокреноуказания построенные по схеме индикаторно-силовых платформ.
Ближайшим аналогом предлагаемого изобретения является система гирокурсокреноуказания (в дальнейшем - система) построенная по схеме индикаторно-силовой курсовертикали на базе вибрационных гироскопов [1].
Недостатком известной системы являются значимые погрешности системы горизонтирования, вызванные систематическими составляющими дрейфа гироскопа блока гирогоризонта и погрешностями, вносимыми действием горизонтальной составляющей суточной скорости вращения Земли. Принимая во внимание, что курсовой гироблок системы на стоянках работает в режиме гирокомпасирования, погрешность системы горизонтирования непосредственно входит в ошибку определения истинного азимута объекта. Увеличение скорости горизонтальной коррекции, с целью уменьшения систематической погрешности системы горизонтирования, приводит к увеличению динамической погрешности, что снижает точность систем пространственной стабилизации специальных средств на самоходных объектах.
Применяемые в настоящее время в системах гирокурсокреноуказания гироскопы (вибрационные, динамически настраиваемые гироскопы) имеют собственный случайный дрейф порядка до 0,01o/ч, поэтому определяющими при выборе и настройке горизонтальной скорости коррекции являются систематическая составляющая скорости дрейфа гироскопа  и скорость дрейфа
и скорость дрейфа  вызванная горизонтальной составляющей скорости вращения Земли, величина которых на порядки превышает собственный случайный дрейф гироскопа.
вызванная горизонтальной составляющей скорости вращения Земли, величина которых на порядки превышает собственный случайный дрейф гироскопа.
Все возрастающие требования по точности определения и сопровождения цели, по эффективности средств вооружений, по точности определения навигационных задач и целеуказаний ставят перед гироскопическими датчиками первичной информации, каковыми являются системы гирокурсокреноуказания, задачу значительного снижения динамической и систематической погрешности в определении углов наклона.
Изобретение направлено на повышение точности системы горизонтирования за счет снижения систематической и динамической составляющих погрешности.
Это достигается тем, что в систему гирокурсокреноуказания, содержащую бикарданов подвес, по осям которого установлены двигатели разгрузки и датчики выходной информации, на внутренней раме подвеса установлены чувствительные элементы горизонта, измерительные оси которых соосны соответствующим осям подвеса, курсовой гироблок с датчиком угла курса, состоящий из гироузла с моментными датчиками и датчиками угла, систем азимутальной и горизонтальной коррекции и системы приведения оси гироскопа в плоскость географического меридиана, блок гирогоризонта, содержащий гироузел с датчиками угла и момента, установленными по ортогональным измерительным осям, при этом выходы чувствительных элементов горизонта через усилители горизонтальной коррекции подключены к соответствующим моментным датчикам гироузла блока гирогоризонта, а выходы датчиков угла через усилители мощности подключены к обмоткам управления двигателем разгрузки, введены два интегратора с "памятью", вычислительный блок, устройство "стоянка-ход" и исполнительное реле, при этом каждый из интеграторов с "памятью" подключен параллельно усилителям горизонтальной коррекции, выход датчика угла курса подключен к входу вычислительного блока, на два других входа которого подключены сигналы информации о текущем значении широты местонахождения самоходного объекта ϕ, и суточной скорости вращения Земли ω3. Выходы вычислительного блока подключены к входам соответствующих усилителей горизонтальной коррекции, выход устройства "стоянка-ход" подключен к управляющим обмоткам исполнительного реле, контакты которого коммутируют выходные цепи чувствительных элементов горизонта.
На чертеже представлена функционально-кинематическая схема предлагаемой системы курсокреноуказания.
Система гирокурсокреноуказания, представленная на чертеже, содержит бикарданов подвес, состоящий из внутренней рамы 1 и наружной рамы 2, по осям которых установлены датчики выходной информации по углам наклона объекта 3, 4 и двигатели разгрузки 5, 6. На внутренней раме 1 установлен курсовой гироблок, состоящий из гироузла 7, на выходной измерительной оси которого установлены датчик угла курса 8 и двигатель отработки 9 гироузла 7 в азимуте. Курсовой гироблок включает в себя также элементы и системы обеспечения работы его в режиме определения истинного азимута на стоянке и в режиме хранения направления при движении объекта.
На внутренней раме 1 бикарданова подвеса установлены также чувствительные элементы горизонта 10, 11 и блок гирогоризонта, состоящий из гироузла 12, по ортогонально измерительным осям которого расположены датчики угла 13, 14 и моментные датчики 15, 16. В систему горизонтальной коррекции гирогоризонта, состоящей из чувствительных элементов горизонта 10, 11, усилителей горизонтальной коррекции 17, 18 и моментных датчиков 15, 16, введены интеграторы 19, 20 с "памятью", подключенные параллельно усилителям горизонтальной коррекции 17, 18, вычислительный блок 21. Система горизонтирования включает в себя систему силовой стабилизации, состоящую из датчиков угла 13, 14, усилителей мощности 22, 23 и двигателей разгрузки 5, 6. В систему курсокреноуказания введены устройство "стоянка-ход" 24 и исполнительное реле 25 с контактами 26, 27, установленными на выходе чувствительных элементов горизонта 10, 11.
Выходы чувствительных элементов горизонта 10, 11 через контакты 26, 27 подключены ко входам усилителей горизонтальной коррекции 17, 18 и интеграторов 19, 20 с "памятью". Выходы усилителей горизонтальной коррекции 17, 18 и интеграторов с "памятью" 19, 20 подключены ко входам моментных датчиков 15, 16, а выходы датчиков угла 13, 14 через усилители мощности 22, 23 подключены к управляющим обмоткам двигателей разгрузки 5, 6. Выход датчика угла курса 8 αк подключен ко входу вычислительного блока 21, на два других входа которого поступают сигналы информации о текущем значении географической широты, местонахождения объекта ϕ и суточной скорости вращения Земли (ω3-постоянна). Выходы вычислительного блока 21 подключены ко входам соответствующих усилителей горизонтальной коррекции 17, 18. Выход устройства "стоянка-ход" 24 подключен к управляющим обмоткам исполнительного реле 25, контакты 26, 27 которого коммутируют выходные цепи чувствительных элементов гирогоризонта 10, 11.
Работа предлагаемой системы происходит следующим образом. При включении системы (или остановках объекта) контакты 26, 27 исполнительного реле 25 находятся в замкнутом состоянии, обеспечивая тем самым подключение сигналов чувствительных элементов горизонта 10, 11 ко входам усилителей горизонтальной коррекции 17, 18 и входам интеграторов с "памятью" 19, 20. Интеграторы с "памятью" обеспечивают компенсацию систематической составляющей ошибки гирогоризонта, вызванной инструментальными погрешностями гирогоризонта. Эта ошибка определяется из соотношения (1), как 
Так, если имеется отклонение чувствительных элементов горизонта 10, 11 от плоскости горизонта, то выходной сигнал интегратора в блоке "памяти" будет накапливаться, а через систему горизонтальной коррекции и систему силовой отработки рам бикарданова подвеса это отклонение будет уменьшаться. Накопление выходного сигнала интегратора продолжается до тех пор, пока отклонение чувствительного элемента не сведется к нулю. Таким образом обеспечивается компенсация статической погрешности гирогоризонта.
После выхода внутренней рамы 1 в плоскость горизонта курсовой гироблок переводится в режим гирокомпасирования, т. е. определяется угол αк между проекцией продольной оси объекта на плоскость горизонта и плоскостью географического меридиана.
При этом необходимо отметить, что юстировка прибора при монтаже на объекте проводится таким образом, чтобы наружная ось рамы 2 карданова подвеса была параллельна продольной оси объекта, а нулевое значение датчика угла курса 8 αк соответствовало положению, когда ось кинетического момента H1 гироузла 7 параллельна оси наружной рамы 2 карданова подвеса.
Измеренный курсовым гироблоком угол αк поступает в вычислительный блок 21, куда одновременно с навигационной аппаратуры поступают сигналы о географической широте местоположения объекта ϕ и сигнал о суточной скорости вращения Земли ϕ-const. В вычислительном блоке 21 определяется горизонтальная составляющая суточной скорости Земли ωr= ω3cosϕ. Затем эта составляющая раскладывается по ортогональным осям внутренней 1 и наружной 2 рам подвеса. Так, например, при угле
αк < 90o и широте места ϕт по осям внутренней 1 и наружной 2 рам будут действовать составляющие ω3cosϕтsinαк и ω3cosϕтcosαк. Соответственно этим составляющим в вычислительном блоке 21 вырабатываются поправочные сигналы UB и UH. Поправочные сигналы UB и UH с вычислительного блока 21 поступают на вход соответствующих усилителей горизонтальной коррекции 17, 18, выходы которых подключены ко входам моментных датчиков 15, 16 соответственно, которые накладывают по соответствующим осям гироскопа Н2 моменты, компенсирующие дрейф гироскопа от действия горизонтальной составляющей скорости Земли.
Таким образом в период готовности при неподвижном объекте: определяются и "запоминаются" в интеграторах сигналы компенсации инструментальных (постоянных) погрешностей гирогоризонта; определяется курсовой угол объекта αк; вычислительный блок 21 по информации о курсе объекта αк географической широте местоположения объекта ϕ поступающей с навигационной системы и скорости вращения Земли ω3-const вырабатывает сигналы поправки, компенсирующие погрешности гирогоризонта от действия горизонтальной составляющей скорости вращения Земли.
При трогании самоходного объекта с устройства "стоянка-ход" 24 (в общем случае это может быть механический или доплеровский датчик скорости, спидометр или специальное устройство) на исполнительное реле 25 поступает командный сигнал. Реле 25 размыкает контакты 26, 27, т. е. разрывает связь между чувствительными элементами горизонта 10, 11, усилителями горизонтальной коррекции 17, 18 и интеграторами с "памятью" 19, 20 соответственно. Таким образом, при движении объекта производится отключение позиционной коррекции гирогоризонта при сохранении сигнала "памяти" интеграторов с "памятью" 19, 20 и сигналов компенсации UB и UH погрешностей из-за горизонтальной составляющей скорости вращения Земли, вырабатываемых вычислительным блоком 21. При этом сигнал "памяти" интеграторов с "памятью" 19, 20 компенсирует все постоянные моменты, а поправочные сигналы UB и UH непрерывно компенсируют погрешности гироскопа от горизонтальной составляющей скорости Земли.
Точность системы горизонтирования при таком режиме определяется только собственным дрейфом гироскопа Н2, который для современных гироскопов составляет величину порядка 0,017 ч, и медленно меняющимися постоянными моментами, изменение которых за время движения объекта не более часа не может быть значительным. При этом полностью исключаются динамические погрешности гироскопа, связанные с ускорениями и эволюциями движения объекта (разгон, торможение, разворот, качка и т.д.) за счет отключения позиционной коррекции. При остановках объекта по команде с устройства "стоянка-ход" 24 исполнительное реле 25 замыкает контакты 26, 27 и переводит гирогоризонт в режим позиционно-интегральной коррекции, при которой позиционная коррекция обеспечивает ускоренное восстановление гироскопа Н2 в положение местной вертикали, а интеграторы с "памятью" 19, 20 корректируют сигналы "памяти" в соответствии с изменениями постоянных моментов.
Реализация предложенных технических решений в системе гирокурсокреноуказания позволяет резко повысить точность измерения углов наклона объекта при движении за счет исключения динамической составляющей погрешности гирогоризонта и компенсации постоянных моментов, действующих по осям гироскопа. Все это позволит резко повысить точность пространственной стабилизации средств вооружения и обнаружения цели, повысить точность комплексирования систем измерения высоты НСО, а также повысить точность определения истинного азимута объекта за счет точности горизонтирования основания курсового гироблока, работающего как в режиме хранения опорного направления, так и в режиме гирокомпасирования.
Источники информации
1. Патент РФ 2124184, приоритет 15.12.96, БИ 36, 1998.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2192622C1 |
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ С УСТРОЙСТВОМ ВСТРОЕННОГО КОНТРОЛЯ | 2001 |
|
RU2207505C1 |
| ГИРОГОРИЗОНТ ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ДЕФОРМАЦИЙ ОПОР РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 2001 |
|
RU2207508C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| ГИРОГОРИЗОНТ С ДИСКРЕТНОЙ СИСТЕМОЙ ГОРИЗОНТАЛЬНОЙ КОРРЕКЦИИ | 2000 |
|
RU2172473C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| ГИРОГОРИЗОНТ ДЛЯ АВТОМАТИЗИРОВАННЫХ СИСТЕМ УПРАВЛЕНИЯ ОГНЕМ | 2000 |
|
RU2178143C1 |
| ГИРОГОРИЗОНТ | 2001 |
|
RU2207509C1 |
| САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2166733C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 2004 |
|
RU2274832C1 |
Изобретение предназначено для измерения углов наклона объекта при стабилизации и навигации самоходных объектов. В систему гирокурсокреноуказания, представляющую собой индикаторно-силовую платформу с установленным на ней двухрежимным курсовым гироблоком и блоком гирогоризонта, введены два интегратора с "памятью", подключенными параллельно усилителям горизонтальной коррекции гирогоризонта, вычислительный блок, устройство "стоянка-ход" и исполнительное реле, контакты которого коммутируют выходную цепь чувствительных элементов горизонта. При движении объекта устройство "стоянка-ход" отключает интегрально-позиционную коррекцию гирогоризонта, исключая тем самым динамическую составляющую погрешности. Систематическую составляющую компенсирует сигнал интегратора. Погрешность от горизонтальной составляющей скорости вращения Земли компенсируют сигналы, вырабатываемые вычислительным блоком. Указанное приводит к повышению точности измерения углов наклона. 1 ил.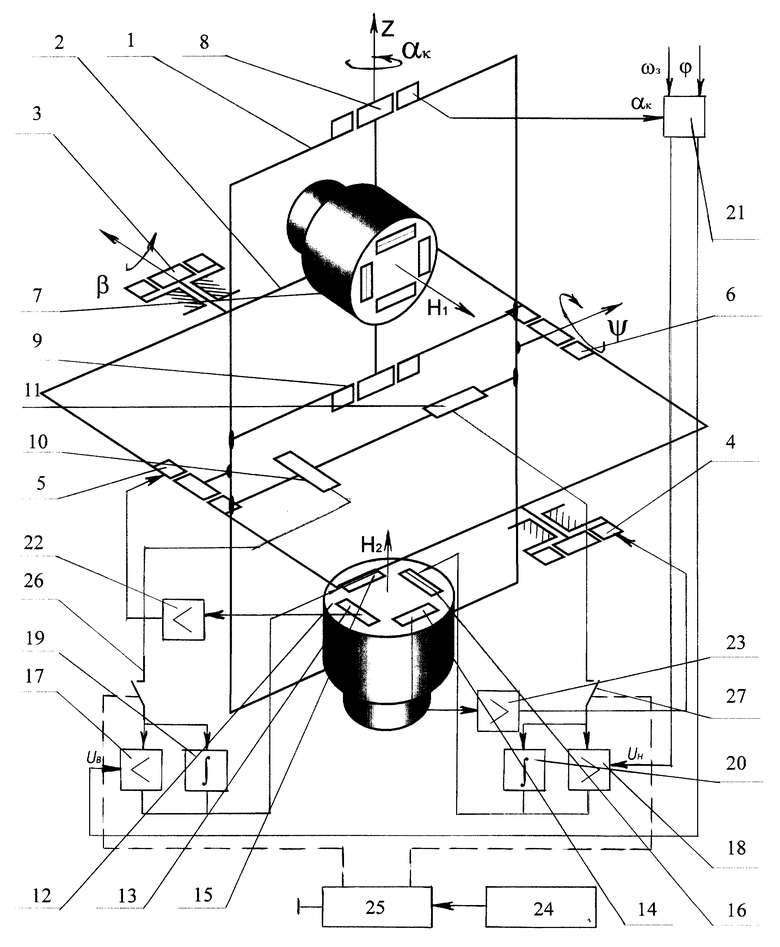
Система гирокурсокреноуказания, содержащая бикарданов подвес, по осям которого установлены двигатели разгрузки и датчики выходной информации, на внутренней раме подвеса установлены чувствительные элементы горизонта, измерительные оси которых соосны с соответствующими осями подвеса, курсовой гироблок с датчиком угла курса, состоящий из гироузла с моментными датчиками и датчиками угла, систем азимутальной и горизонтальной коррекции и системы приведения оси гироскопа в плоскость географического меридиана, блок гирогоризонта, содержащий гироузел с датчиками угла и момента, установленными по ортогональным измерительным осям, при этом выходы чувствительных элементов горизонта через усилители горизонтальной коррекции подключены к соответствующим моментам датчикам гироузла блока гирогоризонта, а выходы датчиков угла через усилители мощности подключены к обмоткам управления двигателей разгрузки, отличающаяся тем, что в нее введены два интегратора с "памятью", вычислительный блок, устройство "стоянка-ход" и исполнительное реле, при этом каждый из интеграторов подключен параллельно усилителям горизонтальной коррекции, выход датчика угла курса подключен ко входу вычислительного блока, к двум другим входам которого подключены сигналы информации о текущем значении географической широты местонахождения самоходного объекта ϕ и суточной скорости вращения Земли ω3, выходы вычислительного блока подключены ко входам соответствующих усилителей горизонтальной коррекции, выход устройства "стоянка-ход" подключен к управляющей обмотке исполнительного реле, контакты которого коммутируют выходные цепи чувствительных элементов горизонта.
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| RU 2073206 С1, 10.02.1997 | |||
| DE 3033280 А, 22.04.1982. | |||

