Изобретение относится к области измерительной техники и может быть использовано при разработке и изготовлении приборов для стабилизации, навигации и топопривязки объектов наземной техники.
Известен курсовой гироскопический прибор с самоориентированием [1], который представляет собой курсовую гироскопическую систему на базе динамически настраиваемого гироскопа с режимом самоориентирования. Режим самоориентирования (режим гирокомпаса) используется во время стоянки объекта для определения начального азимута объекта или во время очередных остановок в процессе движения для корректировки курсового угла объекта.
Недостаток курсового прибора по патенту [1] заключается в малой точности определения азимута и сложности изготовления. Это объясняется тем, что при остановках объекта на наклонной поверхности для выработки компенсирующих и управляющих сигналов требуются датчики с высокой точностью линейных характеристик в широком диапазоне, что повышает стоимость, усложняет процесс управления и изготовления.
Известна также система гироскопическая курсокреноуказания ПБ2.527.004 [2], работающая только в режиме выработки сигналов об изменении (приращении) углов курса (режим удержания заданного азимутального направления) крена и тангажа объекта, на котором система установлена.
В качестве прототипа принята система гироскопическая курсокреноуказания [2].
Система состоит из блока азимутального и блока горизонтального (конструктивно образуют единый гироблок).
Блок азимутальный представляет собой внутреннюю раму карданова подвеса, на которой установлены датчик угла курса (в системе гироскопической курсокреноуказания ПБ2.527.004 [2] в качестве датчика угла курса установлен вращающийся трансформатор ВТ), датчик стабилизирующего момента и гироскопический чувствительный элемент (динамически настраиваемый гироскоп типа ГВК), в котором две оси чувствительности образованы двумя ортогонально размещенными датчиками угла и датчиками момента, при этом одна ось гироскопического чувствительного элемента совпадает с осью внутренней рамы карданова подвеса.
Блок горизонтальный представляет собой среднюю и наружную рамы карданова подвеса. На средней раме установлен датчик угла тангажа (синусно-косинусный трансформаторный датчик (СКТД), датчик стабилизирующего момента, датчики наклона (жидкостные маятниковые переключатели типа ДЖМ) и гироскопический чувствительный элемент (динамически настраиваемый гироскоп типа ГВК). На наружной раме установлен датчик угла крена (синусно-косинусный трансформаторный датчик СКТД) и датчик стабилизирующего момента. У гироскопического чувствительного элемента оси чувствительности образованы двумя ортогонально размещенными датчиками угла и датчиками момента и совпадают с осями средней и наружной рамами карданова подвеса соответственно.
За счет работы блока горизонтального средняя рама карданова подвеса стабилизируется в плоскости горизонта, а ось внутренней рамы удерживается по направлению вертикали места. За счет работы блока азимутального вектор кинетического момента чувствительного элемента блока азимутального удерживается в плоскости горизонта в фиксированном направлении относительно инерциальной системы координат. При этом с датчиков угла курса, крена, тангажа снимается информация об изменениях (приращениях) курсового угла, углов поперечного и продольного наклона объекта соответственно.
Недостаток указанной системы заключается в том, что для определения азимута заданного направления требуется дополнительный прибор - гирокомпас, который по габаритам, весу, стоимости изготовления не уступает системе гироскопической курсокреноуказания, т. е. для выполнения задачи по определению азимута подвижного объекта требуется фактически два равноценных прибора, причем для работы с гирокомпасом требуется квалифицированное операторское обслуживание.
Изобретение направлено на повышение точности, уменьшение габаритов, веса и стоимости изготовления, повышение удобства в эксплуатации (все режимы работы системы самоориентирующейся гироскопической курсокреноуказания автоматизированны) путем исключения применения дополнительного прибора (гирокомпаса) для начального ориентирования.
Для определения начального азимута заданного направления использованы функциональные возможности самой системы гироскопической курсокреноуказания путем введения дополнительных связей и элементов без существенного увеличения габаритов и веса системы.
Это достигается тем, что в систему гироскопическую курсокреноуказания, содержащую блок азимутальный, состоящий из внутренней рамы карданова подвеса с датчиком угла курса, датчиком стабилизирующего момента, усилителя стабилизации и гироскопического чувствительного элемента, имеющего две измерительные оси, образованные двумя ортогонально размещенными датчиками угла и датчиками момента, причем первая измерительная ось гироскопического чувствительного элемента совпадает с осью внутренней рамы карданова подвеса, а выход датчика угла, установленного на первой измерительной оси гироскопического чувствительного элемента, связан с входом усилителя стабилизации, выход которого связан с датчиком стабилизирующего момента, и блок горизонтальный, состоящий из карданова подвеса с датчиками угла тангажа и крена, датчиками стабилизирующего момента, датчиками наклона и гироскопического чувствительного элемента, введено управляющее устройство, содержащее усилитель привода в меридиан, переключатель режимов, датчик широтной поправки и два ограничителя, причем вход усилителя привода в меридиан соединен с выходом датчика угла, установленного на второй измерительной оси гироскопического чувствительного элемента блока азимутального, выход усилителя привода в меридиан соединен со входом первого ограничителя и через первый контакт переключателя режимов со входом датчика момента, установленного на второй измерительной оси гироскопического чувствительного элемента блока азимутального, выход первого ограничителя соединен со входом второго ограничителя и через второй контакт переключателя режимов соединен с выходом второго ограничителя и со входом датчика момента, установленного на первой измерительной оси гироскопического чувствительного элемента блока азимутального, а выход датчика широтной поправки соединен со входом датчика момента, установленного на второй измерительной оси чувствительного элемента блока азимутального.
На чертеже представлена схема предлагаемой системы самоориентирующейся гироскопической курсокреноуказания.
Система самоориентирующаяся гироскопическая курсокреноуказания состоит из блока азимутального, блока горизонтального и управляющего устройства.
Блок азимутальный представляет собой внутреннюю раму 1 карданова подвеса, на которой установлены датчик угла курса 2, датчик стабилизирующего момента 3 и гироскопический чувствительный элемент 4, в котором две измерительные оси (X1-X1, Z1-Z1) образованы двумя ортогонально размещенными датчиками угла 5, 6 и датчиками момента 7, 8. Одна ось гироскопического чувствительного элемента Z1-Z1 совпадает с осью внутренней рамы карданова подвеса. Блок азимутальный включает в себя также усилитель стабилизации 9.
Блок горизонтальный представляет собой среднюю 10 и наружную 11 рамы карданова подвеса. На средней раме 10 установлен датчик угла тангажа 12, датчик стабилизирующего момента 13, датчики наклона 4, 15 и гироскопический чувствительный элемент 16. На наружной раме 11 установлен датчик угла крена 17 и датчик стабилизирующего момента 18. У гироскопического чувствительного элемента 16 измерительные оси X2-X2 и Z2-Z2 образованы датчиками угла 19, 20, датчиками момента 21, 22 и совпадают с осями средней 10 и наружной 11 рамами карданова подвеса соответственно.
Управляющее устройство введено в систему гироскопическую курсокреноуказания для управления работой блока азимутального с целью обеспечения режима самоориентирования (режима гирокомпаса) и состоит из усилителя привода в меридиан 23, двух ограничителей 24, 25, переключателя режимов (на чертеже не показан) с контактами K1 и K2 и датчика широтной поправки 26.
Система самоориентирующаяся гироскопическая курсокреноуказания работает следующим образом.
За счет работы блока горизонтального производится горизонтирование средней рамы 10 карданова подвеса, т.е. оси X2-X2 и Z2-Z2 гироскопического чувствительного элемента 16 блока горизонтального удерживаются в плоскости горизонта, а ось Z1-Z1 блока азимутального удерживается в направлении местной вертикали. При этом сигналы об углах наклона объекта снимаются с датчиками угла крена 17 и датчика угла тангажа 12.
В режиме удержания заданного азимутального направления (режим гироазимута при стоянке и при движении объекта) контакт K1 переключателя режимов разомкнут, а K2 замкнут (показано на чертеже). Для удержания вектора кинетического момента H1 гироскопического чувствительного элемента 4 в плоскости горизонта используется горизонтальная коррекция - сигнал с датчика угла 5, пропорциональный углу отклонения вектора кинетического момента H1 от плоскости горизонта, через усилитель 23, ограничитель 24 и контакт K1 поступает на датчик момента 8, который устраняет указанное отклонение. Азимутальная коррекция используется для устранения отклонения рамы 1 карданова подвеса относительно оси Z1-Z1 в инерциальном пространстве - сигнал с датчика угла 6, пропорциональный углу отклонения, через усилитель стабилизации 9 поступает на датчик стабилизирующего момента 3, который устраняет указанное отклонение. Таким образом осуществляется стабилизация рамы 1 карданова подвеса в инерционном пространстве относительно вертикальной оси Z1-Z1, совпадающей с направлением вертикали места. Сигнал о курсе объекта снимается с датчика угла курса 2.
В режиме самоориентирования (в режиме гирокомпаса при стоянке объекта) контакт K2 переключателя режимов замкнут, а K2 разомкнут. В цепь горизонтальной коррекции датчик угла 5 - усилитель 23 - ограничитель 24 - датчик момента 8 подключается ограничитель 25, при этом крутизна горизонтальной коррекции уменьшается и вектор кинетического момента H1 чувствительного элемента 4 отклоняется от плоскости горизонта под действием горизонтальной составляющей угловой скорости вращения Земли на угол β, пропорциональный синусу угла α между плоскостью меридиана и плоскостью, содержащей вектор кинетического момента H1 и вектор угловой скорости вращения Земли. Сигнал с датчика угла 5, пропорциональный углу β, через усилитель привода в меридиан 23 и контакт K1, поступает на датчик момента 7 гироскопического чувствительного элемента 4. Под действием указанного момента вектор кинетического момента H1 стремится совместиться с плоскостью меридиана и после окончания переходного процесса устанавливается в направлении на Север. При этом с датчика угла курса 2 снимается сигнал об истинном азимуте объекта.
Для компенсации вертикальной составляющей угловой скорости вращения Земли, с датчика широтной поправки 26 на датчик момента 7 гироскопического чувствительного элемента 4 блока азимутального подается сигнал, пропорциональный ωв= ωзsinϕ, где ωв - вертикальная составляющая угловой скорости вращения Земли, ωз - угловая скорость вращения Земли, ϕ - широта места.
В качестве гироскопических чувствительных элементов как блока азимутального, так и блока горизонтального, могут быть использованы динамически настраиваемые гироскопы, например типа ГВК (гироскоп с внутренним карданом), или модуляционные гироскопы, и другие. При этом допускается использование в одной системе гироскопических чувствительных элементов различного типа, например, в блоке азимутальном модуляционного гироскопа, а в блоке горизонтальном динамически настраиваемого гироскопа, или наоборот. При этом на одной измерительной оси чувствительного элемента может быть более одного датчика момента, например в ГВК - основной и компенсационный датчик момента. При этом выбор конкретного датчика для осуществления связей между элементами системы зависит от конкретного чувствительного элемента и его технических характеристик.
В качестве датчиков угла курса, крена, тангажа могут быть использованы датчики любого типа, преобразующие механический угол поворота в электрический сигнал - аналоговый или цифровой. Это могут быть сами датчики аналогового типа, например синусно-косинусные, вращающиеся трансформаторы или датчики с преобразователями, если требуется, в цифровой код. Преобразователи могут быть любого типа - фазовые, амплитудные и т.д.
В качестве датчиков угла наклона могут быть использованы датчики различного типа, например жидкостные маятниковые переключатели, акселерометры и т.д.
В качестве переключателя режима могут использоваться различные коммутирующие устройства - электромеханические (реле), электронные (на микросхемах и других радиоэлементах).
В качестве ограничителей могут использоваться элементы электронного устройства или их набор (простейший пример - резисторы или их набор), позволяющие при изменении режима работы системы изменить (при переходе к режиму самоориентирования уменьшить) крутизну горизонтальной коррекции.
В качестве датчика широтной поправки может использоваться электронное устройство, вырабатывающее электрический сигнал, пропорциональный вертикальной составляющей угловой скорости вращения Земли. Это устройство может быть аналоговым, цифроаналоговым, а также иметь управление извне.
Предлагаемое в заявке изобретение может быть использовано при разработке автономных систем навигации и позволяет уменьшить габариты и вес аппаратуры, значительно снизить стоимость изготовления, упростить операторское обслуживание.
В настоящее время разработаны опытные образцы системы самоориентирующейся гироскопической курсокреноуказания, которые проходят предварительные испытания, в том числе и на подвижных объектах. Результаты испытаний положительны.
Литература
1. Патент ФРГ N 3033280 от 04.09.89 г. МКИ G 01 C 19/34.
2. Система гироскопическая курсокреноуказания. Технические условия ПБ2.527.004 ТУ. ВНИИ "Сигнал", г. Ковров, 1989 г.
3. Изделие 1Т215. Техническое описание ПБ1.590.045 ТО. ВНИИ "Сигнал", г. Ковров, 1989 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2166733C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2207506C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 2004 |
|
RU2274832C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2316730C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2003 |
|
RU2258205C1 |
| НАЗЕМНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1999 |
|
RU2165075C1 |
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2192622C1 |
| СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2186339C1 |
Система может быть использована при разработке и изготовлении приборов для стабилизации, навигации и топопривязки объектов наземной техники. Система состоит из блоков азимутального и горизонтального. Каждый блок содержит датчики угла, датчики момента, усилители и гироскопические чувствительные элементы. В блок азимутальный введено управляющее устройство, содержащее усилитель привода в меридиан, переключатель режимов, датчик широтной поправки и ограничители. Вход усилителя привода в меридиан соединен с выходом датчика угла азимутального гироскопа через контакт переключателя режимов. Выход ограничителей через контакт переключателя режимов соединен с входом датчика момента азимутального гироскопа. Выход датчика широтной поправки соединен с входом датчика компенсационного. Блок горизонтальный поддерживает вертикальность азимутальной оси и выдает сигналы по крену и тангажу. Изобретение позволяет повысить точность, уменьшить габариты и вес навигационной аппаратуры, значительно снизить стоимость изготовления, упростить операторское обслуживание и улучшить удобство в эксплуатации. 1 ил.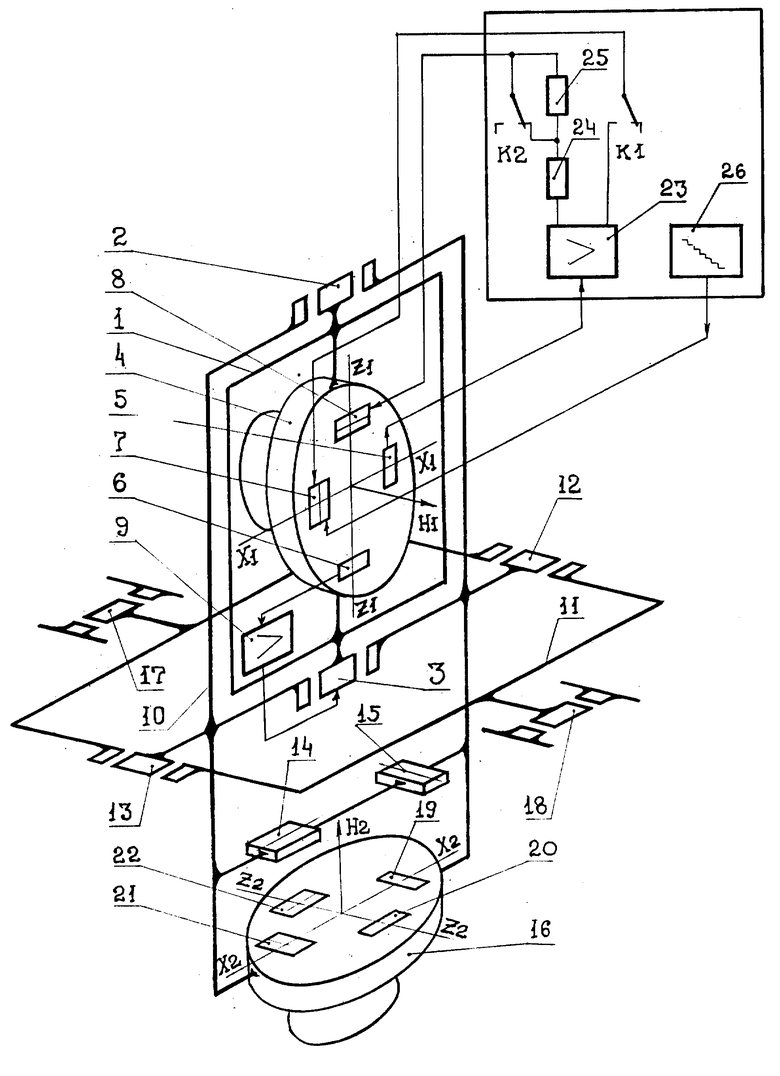
Система гироскопическая курсокреноуказания, содержащая блок азимутальный, состоящий из внутренней рамы карданова подвеса с датчиком угла курса, датчиком стабилизирующего момента, усилителя стабилизации и гироскопического чувствительного элемента, имеющего две измерительные оси, образованные двумя ортогонально размещенными датчиками угла и датчиками момента, причем первая измерительная ось гироскопического чувствительного элемента совпадает с осью внутренней рамы карданова подвеса, а выход датчика угла, установленного на первой измерительной оси гироскопического чувствительного элемента, связан с входом усилителя стабилизации, выход которого связан с датчиком стабилизирующего момента, и блок горизонтальный, состоящий из карданова подвеса с датчиками угла тангажа и крена, датчиками стабилизирующего момента, датчиками наклона и гироскопического чувствительного элемента, отличающаяся тем, что в систему гироскопическую курсокреноуказания введено управляющее устройство, содержащее усилитель привода в меридиан, переключатель режимов, датчик широтной поправки и два ограничителя, причем вход усилителя привода в меридиан соединен с выходом датчика угла, установленного на второй измерительной оси гироскопического чувствительного элемента блока азимутального, выход усилителя привода в меридиан соединен с входом первого ограничителя и через первый контакт переключателя режимов с входом датчика момента, установленного на второй измерительной оси гироскопического чувствительного элемента блока азимутального, выход первого ограничителя соединен с входом второго ограничителя и через второй контакт переключателя режимов соединен с выходом второго ограничителя и с входом датчика момента, установленного на первой измерительной оси гироскопического чувствительного элемента блока азимутального, а выход датчика широтной поправки соединен с входом датчика момента, установленного на второй измерительной оси чувствительного элемента блока азимутального.
| Система гироскопическая курсокреноуказания | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| DE 3033280 A, 22.04.82 | |||
| DE 2922412 A, 04.12.80 | |||
| DE 3019372 A, 26.11.81 | |||
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| Гирокомпас | 1991 |
|
SU1797690A3 |
| Способ определения курса | 1982 |
|
SU1180698A1 |

