Изобретение относится к области гироскопической техники и предназначено для использования в системах стабилизации, целеуказания и навигации наземных самоходных объектов.
В настоящее время наиболее широкое применение для систем стабилизации средств обнаружения цели, вооружения, средств целеуказания и навигации нашли гироскопические системы курсокреноуказания, созданные на базе современной гироскопической техники.
Современные системы, кроме измерения углов наклона объекта и хранения опорного направления движения объекта, решают задачу определения направления географического меридиана (истинного азимута объекта), что особенно необходимо при решении задач целеуказания, топопривязки и навигации.
Ближайшим аналогом предлагаемого изобретения является универсальная, с точки зрения применения как в системах стабилизации, навигации и целеуказания, самоориентирующаяся система гирокурсокреноуказания (в дальнейшем по тексту - система) [1]. Система сконструирована по схеме курсовертикали на базе динамически настраиваемых выбрационных гироскопов, имеющих собственный случайный дрейф в пределах 0,01÷0,02o/ч.
Точность определения истинного азимута объекта в известной системе определяется погрешностью системы горизонтирования внутренней рамы бикарданова подвеса, на которой установлен курсовой гироблок, случайным собственным дрейфом курсового гироскопа, погрешностями следящих систем, входящих в систему гирокомпасирования и техническими характеристиками датчиков угла и момента, заложенных в конструкцию вибрационного гироскопа и определяющих точность и время определения истинного азимута объекта.
Предлагаемое изобретение направлено на повышение точности и сокращение времени определения истинного азимута за счет исключения из процесса гирокомпасирования курсового гироскопа и следящих систем. входящих в систему гирокомпасирования, погрешность которых определяется техническими возможностями элементов, заложенных в конструкцию курсового вибрационного гироскопа с внутренним карданом.
Это достигается тем, что в систему, содержащую бикарданов подвес, по осям которого установлены двигатели стабилизации и датчики выходной информации по углам наклона, на внутренней раме подвеса установлены чувствительные элементы горизонта, измерительные оси которых соосны соответствующим осям подвеса, курсовой гироблок с датчиком курсового угла, состоящий из гироузла, по ортогональным измерительным осям которого установлены датчики угла и момента, систем горизонтальной и азимутальной коррекции и следящей системы отработки гироузла в азимуте, блок гирогоризонта, содержащий гироузел, по ортогональным измерительным осям которого установлены датчики угла и момента, и систему горизонтальной коррекции, при этом выходы чувствительных элементов горизонта через усилители горизонтальной коррекции подключены к соответствующим моментным датчикам гироузла гирогоризонта, а выходы с датчиков угла через усилители мощности подключены к двигателям стабилизации, введены датчик горизонта, например акселерометр, установленный на внешней раме курсового гироблока соосно с направлением кинетического момента курсового гироскопа, усилитель следящей системы и командный блок с исполнительными контактными устройствами, причем выход датчика горизонта через усилитель следящей системы подключен к двигателю отработки следящей системы курсового гироблока, вход командного блока подключен к выходу программного устройства бортовой вычислительной машины, а контактные устройства командного блока коммутируют цепь электропитания курсового блока, выход датчика горизонта и выходы усилителей горизонтальной коррекции гирогоризонта.
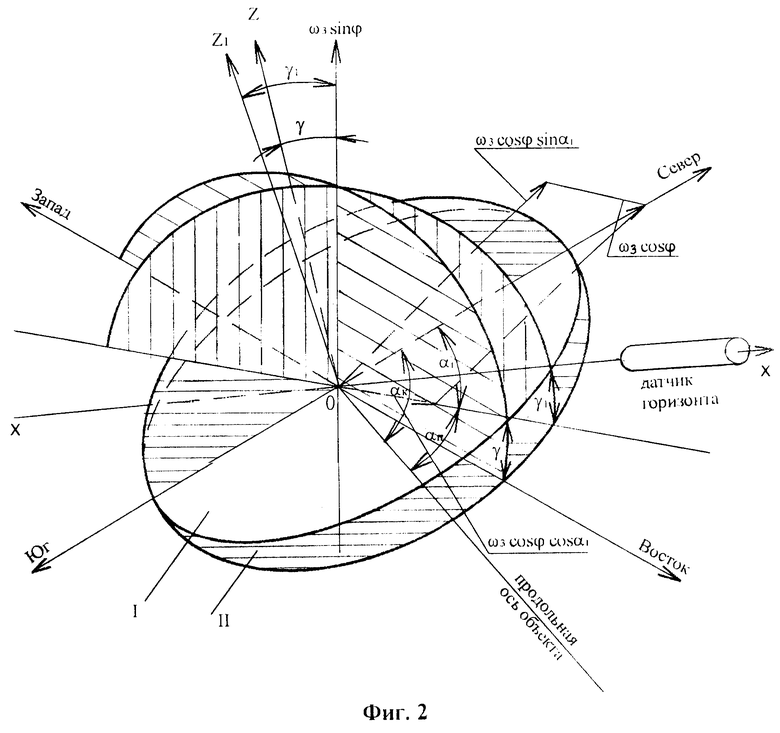
На фиг. 1 представлена функционально кинематическая схема предлагаемой системы. На фиг. 2 представлена система координат, поясняющая режим гирокомпасирования системы, где I - плоскость азимутального приведения; II - плоскость горизонта; αп - угол между продольной осью объекта и горизонтальной проекцией измерительной оси датчика горизонта; αг - угол между горизонтальной проекцией измерительной оси датчика горизонта и направлением на Север; αк - азимут объекта αк = αп+αг; γ = ωзcosϕt - угол наклона измерительной оси курсового гироблока относительно плоскости горизонта; γ1 = ωзcosϕsinαгt - угол наклона измерительной оси датчика горизонта относительно плоскости горизонта.
Предлагаемая система, представленная на фиг.1, содержит бикарданов подвес, состоящий из наружной 1 и внутренней 2 рам, по осям которых установлены датчики выходной информации по углам наклона 3, 4 относительно продольной и поперечной осей объекта соответственно, и двигатели стабилизации 5, 6. На внутренней раме 2 установлены курсовой гироблок, блок гирогоризонта и два чувствительных элемента гирогоризонта 7, 8, например акселерометры или жидкостные маятниковые переключатели, оси чувствительности которых соосны соответствующим осям бикарданова подвеса. Курсовой гироблок состоит из гироузла 9 в кожухе на базе вибрационного гироскопа, по двум ортогональным измерительным осям которого установлены моментные датчики 10, 11 и датчики угла 12, 13. Гироузел 9 в кожухе установлен на внешней раме 14 гироблока, на оси которой установлены датчик выходной информации по углу курса 15 и двигатель отработки следящей системы 16. На раме 14 установлен датчик-горизонта 17, например акселерометр. В курсовой гироблок дополнительно к имеющимся электронным блокам введен усилитель следящей системы 18. При этом выход датчика горизонта 17 через усилитель следящей системы 18 подключен к двигателю отработки следящей системы 16. Курсовой гироблок должен быть выставлен таким образом, чтобы нулевой сигнал датчика выходной информации 15 по углу курса αк соответствовал такому положению, при котором измерительная ось датчика горизонта 17, ось кинетического момента гироскопа H1 и проекция оси наружной рамы 1 бикарданова подвеса на плоскость горизонта были взаимно параллельны.
Блок гирогоризонта содержит гироузел в кожухе 19, жестко установленный на внутренней раме 2 бикарданова подвеса. По двум ортогональным измерительным осям гироузла 19 установлены моментные датчики 20, 21 и датчики угла 22, 23. При этом выходы чувствительных элементов горизонта 7, 8 через усилители 24, 25 подключены к соответствующими моментным датчикам 20, 21, а выходы датчиков угла 22, 23 через усилители мощности 26, 27 подключены к соответствующим двигателям стабилизации 6, 5. В систему введен также командный блок 28 с контактными устройствами, причем вход командного блока 28 подключен к выходу программного устройства бортовой вычислительной машины, а контакты 29 установлены на выходе датчика горизонта 17, контакты 30, 31 - на выходах усилителей горизонтальной коррекции 24, 25, контакт 32 в цепи электропитания - на входе курсового гироблока.
Монтаж системы на объекте должен обеспечивать параллельность наружной оси бикарданова подвеса продольной оси объекта, поскольку азимут объекта определяется как угол между продольной осью самоходного объекта и направлением географического меридиана на Север, измеренный в горизонтальной плоскости.
Работа предлагаемой системы происходит следующим образом.
Первый этап. В соответствии с программой командный блок 28 включает систему, исполнительные контакты 29, 32 разомкнуты, контакты 30, 31 замкнуты. На этом этапе выход датчика горизонта 17 отключен oт входа усилителя следящей системы 18, курсовой гироузел 9 отключен oт блока электропитания. Система находится в режиме горизонтирования. Сигналы с чувствительных элементов горизонта 7, 8, фиксирующие наклон внутренней рамы 2 относительно плоскости горизонта, через усилители 24, 25 поступают на вход моментных датчиков 20, 21, которые накладывая моменты на гироскоп H2 заставляют прецессировать ось кинетического момента к положению местной вертикали. Одновременно с датчиков угла 22, 23, фиксирующих прецессию гироскопа Н2, сигналы через усилители мощности 26, 27 поступают на вход двигателей стабилизации 6, 5, которые отслеживая прецессию гироскопа Н2, устанавливают внутреннюю раму 2 бикарданова подвеса в плоскость горизонта. Процесс горизонтирования заканчивается обнулением чувствительных элементов горизонта 7, 8 и приведением оси кинетического момента гироскопа Н2 и измерительной оси курсового гироблока в направление местной вертикали.
Второй этап. По сигналам командного блока 28 система переводится в режим гирокомпасирования. Исполнительные контакты 30, 31 в цепи горизонтальной коррекции гирогоризонта размыкаются, т.e. гирогоризонт переводится в режим некорректируемого свободного гироскопа, контакты 29 замыкаются, контакты 32 остаются в прежнем разомкнутом состоянии.
Под воздействием горизонтальной составляющей суточной скорости вращения Земли измерительная ось курсового гироблока 0-Z1 отклоняется в плоскости, перпендикулярной направлению географического меридиана, со скоростью ωзcosϕ, где ωз - скорость вращения Земли, ϕ - географическая широта местоположения объекта. Так, например, на широте, ϕ - 48o эта скорость составляет около 10o/ч.
Рассмотрим общий случай, когда ось H1 составляет с продольной осью объекта угол αп а угол между осью H1 и направлением на Север составляет угол αг (фиг. 2). В этом случае скорость отклонения оси H1 и измерительной оси датчика горизонта 3 (фиг.1) составит ωзcosϕsinαг. Датчик горизонта 17 фиксирует угол отклонения γ1 = ωзcosϕsinαгt, где t - время работы гирогоризонта в свободном режиме. Сигнал датчика горизонта 17 через нормально замкнутые контакты 29 и усилитель следящей системы 18 подается на вход двигателя отработки следящей системы 16. Двигатель 16 устанавливает гироузел 9 относительно оси 0-Z1 в плоскость меридиана на Север. При этом необходимо отметить, что разворот гироузла 9 при незапущенном гироскопе H1 происходит как обычного твердого тела. Процесс приведения продолжается до тех пор, пока ось H1 и соответственно ось чувствительности датчика горизонта 17 не установятся в горизонтальной плоскости в направлении меридиана на Север. Угол азимута объекта αк = αп+αг снимается с датчика выходной информации 15 курсового гироблока.
Третий этап. Исполнительные контакты 29, 30, 31, 32 замкнуты. Через нормально замкнутые контакты 32 электропитание поступает в курсовой гироузел, гироскоп разгоняется и переводится в номинальный режим. Гирогоризонт переводится на штатный режим работы. Ось кинетического момента Н2 и измерительная ось курсового гироблока восстанавливаются в направлении местной вертикали.
Четвертый этап. Контакты 29 разомкнуты, контакты 30, 31, 32 замкнуты. Следящая система режима гирокомпасирования отключается. Курсовой гироблок переводится на штатный режим хранения направления. Исходя из рассмотренной физической сущности работы предлагаемой системы в режиме гирокомпасирования очевидно, что теоретическая точность определения азимута объекта для предлагаемой системы, как и для любой другой схемы гирокомпаса, определяется соотношением
где Δαк - погрешность определения азимута; - собственный случайный дрейф гироскопа Н2.
- собственный случайный дрейф гироскопа Н2.
Это соотношение определяет угол отклонения действительной плоскости "отклонения" измерительной оси курсового гироблока от плоскости, перпендикулярной к направлению меридиана. Для систем, где в качестве гироузлов используют динамически настроенные вибрационные гироскопы, случайный собственный дрейф составляет 0,01-0,005o/ч. погрешность определения азимута составит на широте ϕ=48o не более
К достоинствам системы с предлагаемым устройством гирокомпасирования следует отнести следующие моменты.
1. Разворот гироузла с внешней рамой относительно измерительной оси курсового гироблока происходит при незапущенном гироскопе, как обычного твердого тела, что позволит сократить время разворота гироузла в азимуте. При этом время и точность отработки определяется только параметрами следящей системы: чувствительностью датчика горизонта (чувствительность современных акселерометров составляет 10g-5÷10g-6, что обеспечивает чувствительность по углу в пределах 2÷1 угл.сек) и техническими характеристиками усилителя и двигателя отработки.
2. Исключаются случайный дрейф и промежуточные следящие системы, участвующие в процессе гирокомпасирования, имеющие место в аналоге. При этом определяющими по времени и точности определения азимута в аналоге, кроме следящих систем, являются параметры датчика угла и моментного датчика курсового гироскопа (чувствительность по углу, моментные характеристики), которые ограничивают сокращение времени готовности и точность определения азимута объекта, а их дальнейшее совершенствование ограничено конструктивными возможностями малогабаритного гироузла.
3. Определяющим параметром точности определения азимута является в предлагаемой системе собственный случайный дрейф гироскопа гирогоризонта. Поскольку в курсовом гироблоке и в гирогоризонте используется один тип гироузла, гироскоп, используемый в гирогоризонте с вертикальной осью вращения, имеет собственный случайный дрейф порядка в 1,3÷1,5 раза меньший, чем курсовой гироскоп с горизонтальной осью вращения. Таким образом, в предлагаемой системе имеются определенные предпосылки получения более высокой точности определения азимута.
В отдельных случаях предложенное устройство определения азимута объекта может быть использовано для предварительной ускоренной выставки высокоточных гирокомпасов.
Реализация предложенных технических решений позволит сократить время и повысить точность определения азимута объекта и, как следствие, повысить эффективность систем навигации, топопривязки, управления и целеуказания наземных самоходных объектов.
Источники информации
1. Патент РФ 2124184, приоритет 15.12.1996 г., БИ 36, 1998.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2186339C1 |
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ С УСТРОЙСТВОМ ВСТРОЕННОГО КОНТРОЛЯ | 2001 |
|
RU2207505C1 |
| ГИРОГОРИЗОНТ | 2001 |
|
RU2207509C1 |
| ГИРОГОРИЗОНТ С ДИСКРЕТНОЙ СИСТЕМОЙ ГОРИЗОНТАЛЬНОЙ КОРРЕКЦИИ | 2000 |
|
RU2172473C1 |
| ГИРОГОРИЗОНТ ДЛЯ АВТОМАТИЗИРОВАННЫХ СИСТЕМ УПРАВЛЕНИЯ ОГНЕМ | 2000 |
|
RU2178143C1 |
| ГИРОГОРИЗОНТ ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ДЕФОРМАЦИЙ ОПОР РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 2001 |
|
RU2207508C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС (ВАРИАНТЫ) | 2002 |
|
RU2215263C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2002 |
|
RU2215993C1 |
Изобретение относится к области гироскопической техники и направлено на сокращение времени и повышение точности определения азимута объекта. В систему, представляющую собой индикаторно-силовую двухосную платформу с установленными на ней курсовым гироблоком и блоком гировертикали, введены датчик горизонта, установленный на внешней раме курсового гироблока, усилитель следящей системы, подключенный к выходу датчика горизонта, командный блок с контактными устройствами, управляющий режимами работы системы курсокреноуказания. 2 ил.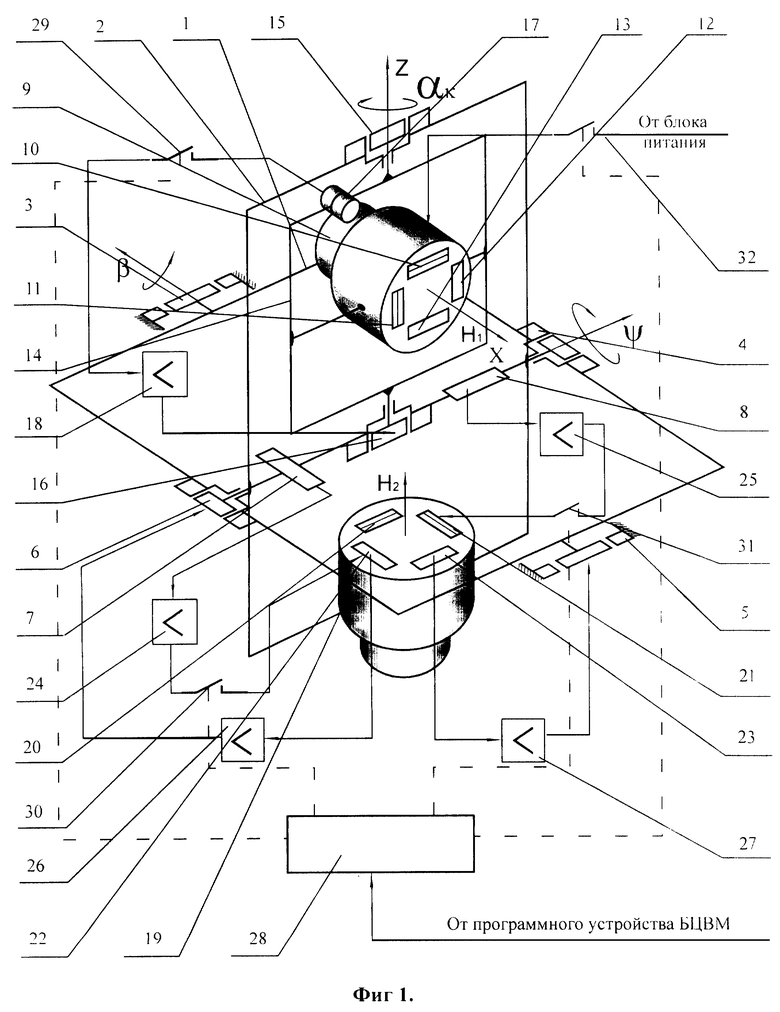
Самоориентирующаяся система гирокурсокреноуказания, содержащая бикарданов подвес, по осям которого установлены двигатели стабилизации и датчики выходной информации по углам наклона, на внутренней раме подвеса установлены чувствительные элементы горизонта, измерительные оси которых соосны соответствующим осям подвеса, курсовой гироблок с датчиком курсового угла, состоящий из гироузла, по ортогональным измерительным осям которого установлены датчики угла и момента, системы горизонтальной коррекции и следящей системы отработки гироузла в азимуте, блок гирогоризонта, содержащий гироузел, по ортогональным измерительным осям которого установлены датчики узла и момента, и систему горизонтальной коррекции, при этом выходы чувствительных элементов горизонта через усилители горизонтальной коррекции подключены к соответствующим моментным датчикам гироузла гирогоризонта, а выходы датчиков угла через усилители мощности подключены к двигателям стабилизации, отличающаяся тем, что в нее введены датчик горизонта, установленный на внешней раме курсового гироблока соосно с направлением кинетического момента курсового гироскопа, усилитель следящей системы и командный блок с исполнительными контактными устройствами, причем выход датчика горизонта через усилитель следящей системы подключен к двигателю отработки следящей системы курсового гироблока, вход командного блока подключен к выходу программного устройства бортовой вычислительной машины, а контактные устройства командного блока коммутируют цепь электропитания курсового гироблока, выход датчика горизонта и выходы усилителей горизонтальной коррекции гирогоризонта.
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| Гирокомпас | 1991 |
|
RU2000542C1 |
| DE 3033280 А, 22.04.1982. | |||

