Предлагаемое изобретение относится к оборонной технике и может быть использовано для отработки навыков применения переносных зенитно-ракетных комплексов (ПЗРК), противотанковых управляемых ракет (ПТУР) и гранатометов.
Известен тренажер, включающий пусковой контейнер, содержащий прицел и соединенный с электронной вычислительной машиной (ЭВМ) блок управления пуском ракеты, а также имитатор оперативной обстановки, выполненный в виде купола, внутри которого установлен пульт задания на экране, установленном на внутренней поверхности купола, например, пролетающего самолета или вертолета, а также фона местности (см., например, http://www.eads. net/eads/en/index. htm, Dome Trainer for Missile Systems and Guns, Dornier GmbH (приложение 1)).
При работе на тренажере обучаемый стрелок находится внутри купола и через прицел пускового контейнера находит цель (например, проецируемый на экран самолет), сопровождает ее и имитирует пуск ракеты по цели, причем действия обучаемого с помощью ЭВМ контролирует инструктор (см. там же).
Известный тренажер позволяет вести тренировку нескольких обучаемых одновременно, однако он пригоден только для обучения и тренировок в стационарных условиях, а кроме того, его использование не обеспечивает формирования у обучаемого навыков правильного пользования прицелом, поскольку в данном тренажере отсутствует система контроля допустимого положения контейнера, что является весьма существенным недостатком, так как при работе с реальной ПЗРК при нештатном положении пускового контейнера при пуске ракеты существует опасность поражения стрелка пороховыми газами. При этом тренажер весьма дорог как в изготовлении, так и в эксплуатации.
Наиболее близким аналогом-прототипом является тренажер фирмы Dornier GmbH (см., например, http://www.eads.net/eads/en/index.htm. Virtual Reality Trainer (приложение 2)), содержащий шлем с установленными в нем индикатором, акустической системой и датчиком пространственного положения, имитатор пускового контейнера с установленными на нем вторым датчиком пространственного положения и блоком пусковых устройств, а также ЭВМ, причем оба датчика пространственного положения и выходы блока пусковых устройств подключены к соответствующим входам, а индикатор и акустическая система соединены с соответствующими выходами ЭВМ.
При пользовании этим тренажером инструктор с помощью ЭВМ задает на экране индикатора соответствующую учебной программе оперативную обстановку и контролирует выполнение обучаемым соответствующей задачи, например поражения низколетящего и маскирующегося на фоне местности вертолета, причем с помощью моделируемой ЭВМ на экране индикатора прицельной системы имитатора пускового контейнера и блока пусковых устройств обучаемый осуществляет имитацию запуска ракеты, воспринимая при этом через наушники акустической системы задаваемый с помощью ЭВМ соответствующий имитируемой обстановке звуковой фон.
Хотя такой тренажер может быть использован как в условиях учебного класса, так и в условиях, приближенных к полевым, в этом тренажере не учтены особенности работы с реальным пусковым контейнером, в частности, не предусмотрен контроль положения имитатора пускового контейнера относительно обучаемого.
Сущность изобретения состоит в том, что в тренажер, содержащий электронную вычислительную машину (ЭВМ), имитатор пускового контейнера с установленными на нем блоком пусковых устройств и первым датчиком пространственного положения, а также выполненные с возможностью их закрепления на обучаемом индикатор, акустическую систему и второй датчик пространственного положения, причем ЭВМ первым и вторым входами соединена с выходами соответственно первого и второго датчиков пространственного положения, соответствующими входами связана с соответствующими выходами блока пусковых устройств имитатора пускового контейнера, а первым и вторым выходами подключена соответственно ко входам индикатора и акустической системы, введены датчик установки имитатора пускового контейнера в штатном положении, а также два элемента И, элемент 6И, два ключа и коммутатор, причем блок пусковых устройств своими с первого по пятый входами соединен соответственно с первым по пятый входами тренажера, первым и вторым выходами подключен соответственно к первому и второму входам коммутатора и одновременно соединен соответственно с третьим и четвертым входами ЭВМ, третьим выходом одновременно подключен к первому входу первого ключа и пятому входу ЭВМ, четвертым выходом одновременно соединен с первым входом элемента 6И и шестым входом ЭВМ, а пятым и шестым выходами подключен к первым входам соответственно первого и второго элементов И, выходами соединенных соответственно со вторым и третьим входами элемента 6И и одновременно подключенных соответственно к седьмому и восьмому входам ЭВМ, а вторыми входами соединенных соответственно с третьим и четвертым выходами ЭВМ, при этом элемент 6И четвертым и пятым входами подключен соответственно к выходам коммутатора и первого ключа, шестым входом соединен с пятым выходом ЭВМ, выходом подключен к первому входу второго ключа, вторым входом соединенного с шестым выходом ЭВМ, а выходом подключен к девятому входу ЭВМ, причем второй вход первого ключа и третий вход коммутатора соответственно соединены с седьмым и восьмым выходами ЭВМ, девятым выходом одновременно подключенной ко входам первого и второго датчиков ориентации, а десятым и одиннадцатым входами соединенной соответственно с выходом датчика установки пускового контейнера в штатном положении и входом тренажера, группой входов подключенного к группе входов датчика установки пускового контейнера в штатном положении.
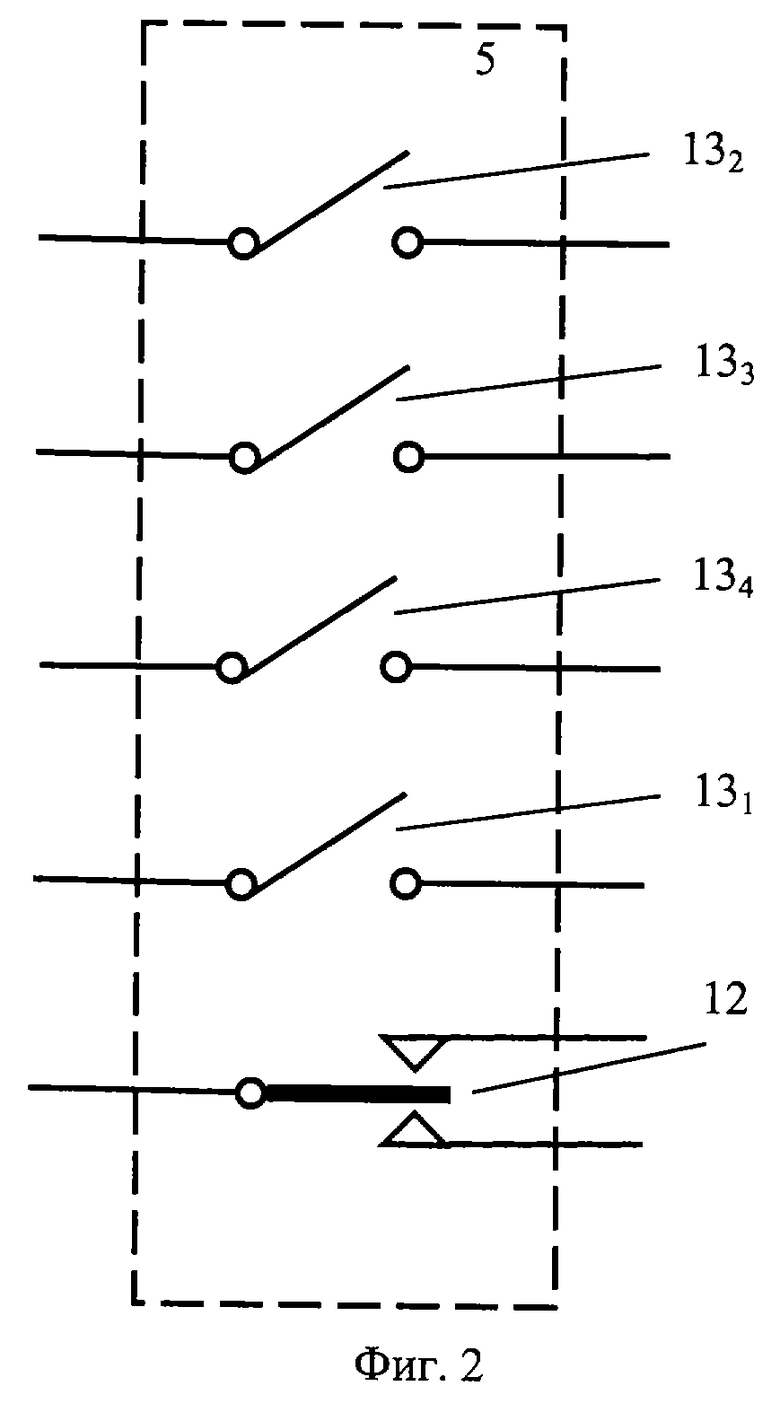
При этом блок пусковых устройств выполнен содержащим пять тумблеров, причем первый тумблер блока пусковых устройств выполнен трехпозиционным, а второй, третий, четвертый и пятый тумблеры выполнены двухпозиционными, при этом входные контакты каждого тумблера соединены с соответствующим входом блока пусковых устройств, первый и второй выходные контакты первого тумблера подключены соответственно к первому и второму выходам блока пусковых устройств, а выходные контакты второго, третьего, четвертого и пятого тумблеров соединены соответственно с третьего по шестой выходами блока пусковых устройств.
Предлагаемый тренажер обеспечивает возможность контролируемого обучения пользованием индивидуальными переносными системами вооружения на всех этапах (приведение в боевое положение, поиск цели, прицеливание, сопровождение и пуск) на различных моделях мишенной обстановки, включая модели реально существующих участков местности. Кроме того, с его помощью можно моделировать подвижные и неподвижные цели, имеющие реалистичный вид и поведение, а также разнообразные условия применения (время дня, погодные условия, задымление и пр.).
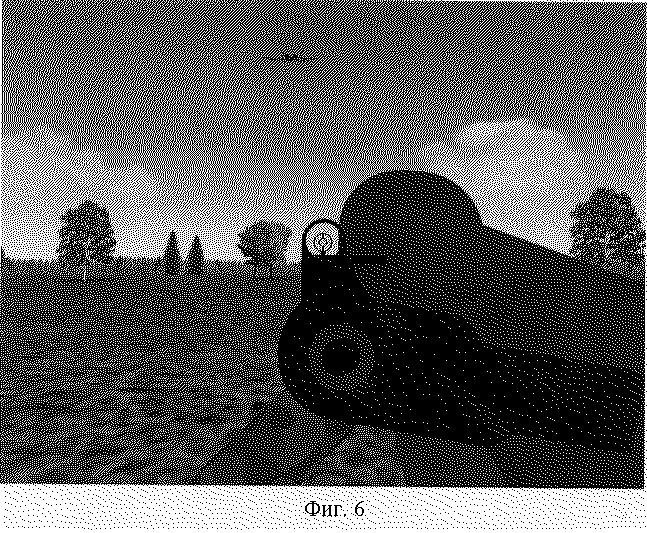
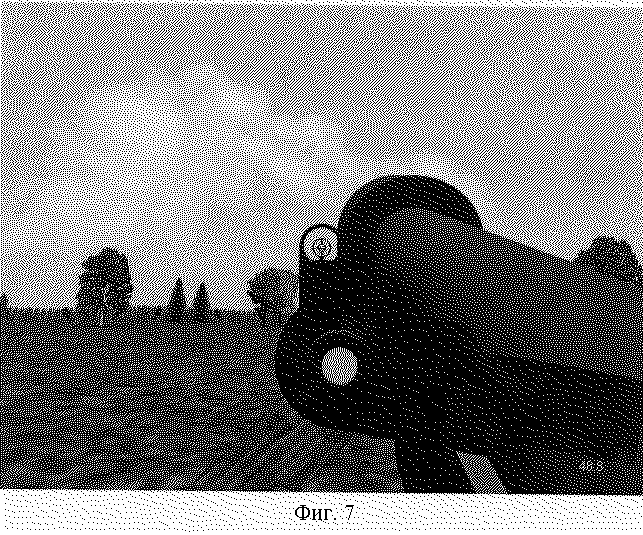
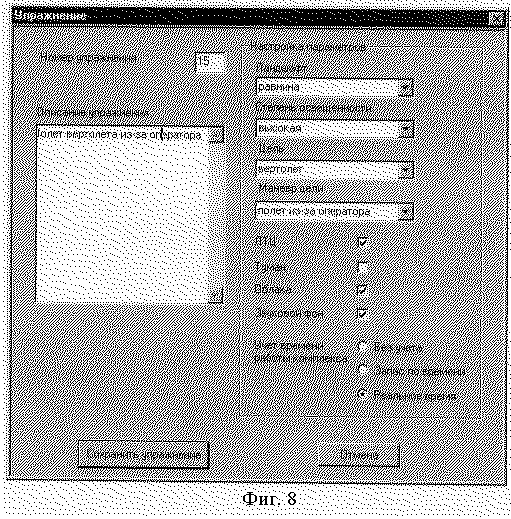
На фиг. 1 показана функциональная блок-схема тренажера, на фиг.2 и 3 представлены соответственно схема блока пусковых устройств и датчика установки имитатора пускового контейнера в штатном положении, на фиг. 4 приведен алгоритм работы ЭВМ тренажера, на фиг.5-8 представлены фотографии: блоков тренажера, одного из типовых сюжетов воспроизводимой на индикаторе виртуальной оперативной обстановки, наведенного на цель прицела, и примера рабочего окна оператора (инструктора) соответственно.
Тренажер (фиг.1) содержит электронно-вычислительную машину (ЭВМ) 1, имитатор 2 пускового контейнера, а также индикатор 3 и акустическую систему 4, установленные на нашлемном устройстве (на чертежах не показано) обучаемого, блок 5 пусковых устройств, два датчика 6 пространственного положения, два ключа 7, два элемента 8 И, элемент 9 6И, коммутатор 10 и датчик 11 фиксации заданного (штатного) положения имитатора 2 пускового контейнера относительно обучаемого.
ЭВМ 1 (фиг.5) выполнена в виде персональной электронной вычислительной машины, содержащей процессорный блок типа, например, Pentium III на базе процессора Intel с графическим ускорителем и звуковой платой, монитор и пульт управления (на чертежах не пронумерованы) и предназначена для задания инструктором виртуальной оперативной обстановки, соответствующей учебной программе, а также для автоматического контроля и контроля инструктором соответствия действий обучаемого в определенном, например, техническими условиями на работу с ПЗРК временном диапазоне и в заданной временной последовательности управляющих работой имитатора 2 сигналов.
Имитатор 2 пускового контейнера (фиг.5) выполнен в виде штатного пускового контейнера с направляющей трубой, содержащей весовой эквивалент запускаемой ракеты (на чертежах не пронумерованы), и предназначен для тренировки обучаемого работе с пусковым контейнером и восприятия при этом соответствующей весовой нагрузки.
Индикатор 3 выполнен в виде экрана на жидких кристаллах (см., например, Sony Glasstron PLM-S700E фирмы Sony, www.sony.com) и предназначен для воспроизведения перед глазами обучаемого виртуальной задаваемой оперативной обстановки, соответствующей цели, а также формирования виртуального прицельного устройства, при этом экран функционально представляет собой дополнительный монитор ЭВМ 1. В реализованном на жидкокристаллической матрице устройстве обеспечен вывод полноцветной графики с разрешением 800х600 (до 1024х768 в нештатном режиме) при частоте обновления 85 Гц.
Акустическая система 4 содержит электродинамики, выходами соединенные с наушниками (см., например, Offprint from Modern Simulation & Training, 4/99, c. 1-4), и предназначена для воспроизведения воспринимаемого обучаемым звукового фона задаваемой виртуальной оперативной обстановки.
Блок 5 пусковых устройств установлен на штатном пусковом контейнере и предназначен для отработки техники работы с тренажером и содержит пять тумблеров, причем первый тумблер 12 блока 5 пусковых устройств выполнен трехпозиционным, а второй, третий, четвертый и пятый тумблеры (131-134) выполнены двухпозиционными, при этом входные контакты каждого тумблера соединены с соответствующим входом блока пусковых устройств, первый и второй выходные контакты первого тумблера 12 подключены соответственно к первому и второму выходам блока пусковых устройств, а выходные контакты второго, третьего, четвертого и пятого тумблеров (131-134) соединены соответственно с третьего по шестой выходами блока 5 пусковых устройств.
Датчики 6 пространственного положения установлены соответственно: первый датчик 61 на имитаторе 2 пускового контейнера, а второй датчик 62 на нашлемном устройстве (на чертежах не показано), выполнены на основе миниатюрных оптических гироскопических устройств InterTrax фирмы InterSense (см., например, http://www.InterTrax.com), обеспечивающих высокоточное измерение пространственной ориентации с частотой 256 Гц, угловым разрешением 0,02o и с максимальной измеряемой угловой скоростью не менее 360 град/с при любом изменении (при смещении и повороте по всем направлениям) положения основания, на котором установлен этот датчик, и предназначены для получения сигналов для определения положения перекрестия прицела, проецируемого на индикатор 3 в виде крестообразного курсора и связанного с направлением продольной оси направляющей трубы (на чертежах не обозначена) имитатора 2 пускового контейнера.
Ключи 7 выполнены в виде RS-триггеров (см., например, У.Титце и К.Шенк. Полупроводниковая схемотехника. М. : Мир, 1982, с. 96) и предназначены для задания с помощью ЭВМ 1 определенного в соответствии с техническими требованиями, например к ПЗРК, времени выполнения процедур приведения в боевую готовность, наведения, прицеливания и запуска зенитной ракеты.
Элементы 8 И и 9 6И, выполненные в виде соответствующих элементов логики (см. , например, там же, с. 105), и коммутатор 10, выполненный в виде последовательного коммутатора на биполярном транзисторе (см., например, там же, с. 280), предназначены для выполнения соответствующих их функциональному назначению операций.
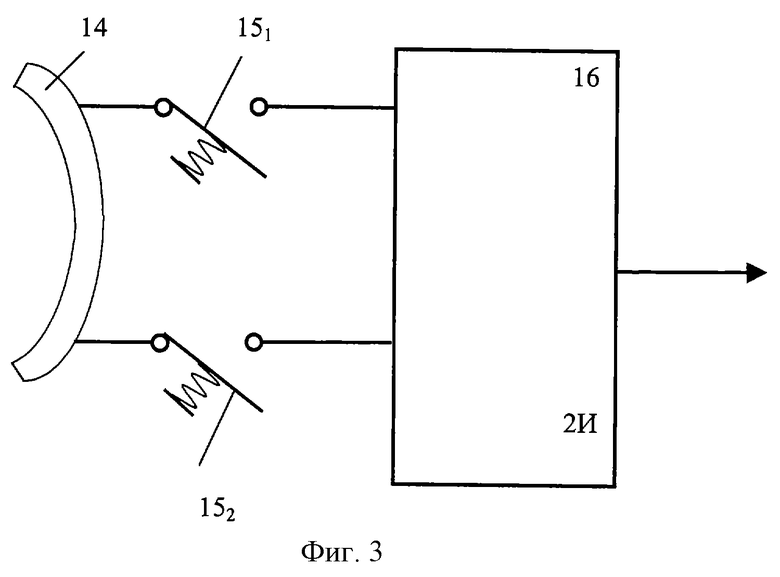
Датчик 11 фиксации штатного положения имитатора 2 пускового контейнера выполнен (фиг. 3) в виде повторяющего контур плеча и установленного (на чертежах не обозначены) на имитаторе 2 пускового контейнера ложемента 14, в котором установлено n (где n = 2,...,N) пружинных ключей 15 (см., например, там же, с. 91), выходами соединенных с соответствующими входами элемента 16 "nИ" (см. , например, там же, с. 105), при этом количество пружин соответствует количеству ключей 15. В реализованном устройстве (фиг. 3) количество ключей n=2, и соответственно элемент 16 выполнен в виде 2И.
Работу с тренажером осуществляют следующим образом.
Обучаемый надевает нашлемное устройство, устанавливая перед глазами индикатор 3 и соответственно закрепляя наушники, а затем устанавливает с помощью ложемента 14 имитатор 2 пускового контейнера в штатном положении и прижимает его к плечу. При этом срабатывают ключи 15, и через элемент 16 2И на соответствующий вход процессорного блока ЭВМ 1 поступает соответствующий (разрешающий продолжать работу) сигнал, после чего на экране индикатора 3 воспроизводят (по выбору инструктора или автоматически, случайной выборкой) какой-либо вариант оперативной обстановки. Обнаружив на экране (индикаторе) 3 цель, обучаемый в заданной последовательности включает тумблеры 12 и 13 блока 5 пусковых устройств, имитируя процедуры приведения имитатора в боевое положение, затем производит прицеливание по заданной инструктором на индикаторе 3 с помощью ЭВМ 1 цели и с помощью тумблера 12 осуществляет виртуальный пуск, причем приведение тумблера 12 в положение, соответствующее первому выходу блока 5 пусковых устройств, за определенное время соответствует пуску в автоматическом режиме, а приведение тумблера в положение, соответствующее второму выходу блока 5 пусковых устройств, с задержкой в этом положении соответствует пуску в ручном режиме, при котором для обеспечения правильного пуска необходимо определенное время (соответствующее заданному техническими требованиями к имитатору 2 пускового контейнера времени движения ракеты по направляющей трубе имитатора) держать цель в перекрестии прицела, не отпуская тумблер 12 из этого положения. При этом включение тумблера 131 соответствует началу работы счетчика времени работы пускового комплекса, счетчику времени выхода головки ракеты на режим и началу опроса (включения тумблеров 132, 133, 134) систем пускового контейнера. Включение тумблера 132 соответствует заданию режима работы по цели - "вдогон или навстречу", включение тумблера 133 соответствует включению селектора помех, включение тумблера 134 соответствует включению определителя "свой-чужой". Кроме того, при этом должны соблюдаться временные интервалы, которые задают с помощью ЭВМ 1 и обеспечивают с помощью ключей 7.
Следует указать, что обучаемый стрелок осуществляет прицеливание путем совмещения воспроизводимых на индикаторе 3 цели и метки прицела, а также по "загоранию" изображения сигнальной лампочки (на чертежах не показана) и звуковому сигналу акустической системы 4.
Контроль правильности прицеливания осуществляется посредством совместной работы двух основных моделей: модели головки самонаведения ракеты из состава ПЗРК и модели функционирования ПЗРК. Модель головки построена на основе аппарата вычислительной геометрии. На основе данных о типе цели, наклонной дальности до нее, ее азимуте, параметре, высоте полета, скорости, а также данных об ориентации пускового контейнера, а следовательно, поля зрения головки самонаведения, в ходе прицеливания и в момент пуска определяется факт захвата цели. Модель функционирования ПЗРК воспроизводит циклограмму применения комплекса и фиксирует положение управляющих органов на пусковом контейнере, а также отслеживает угол наклона пускового контейнера и правильность его удержания для контроля условий безопасного применения.
В момент пуска, то есть по прошествии заданного времени после замыкания тумблера 12, оценивают последовательность действий и соблюдение циклограммы обучаемым и в случае отсутствия ошибок засчитывают поражение цели.
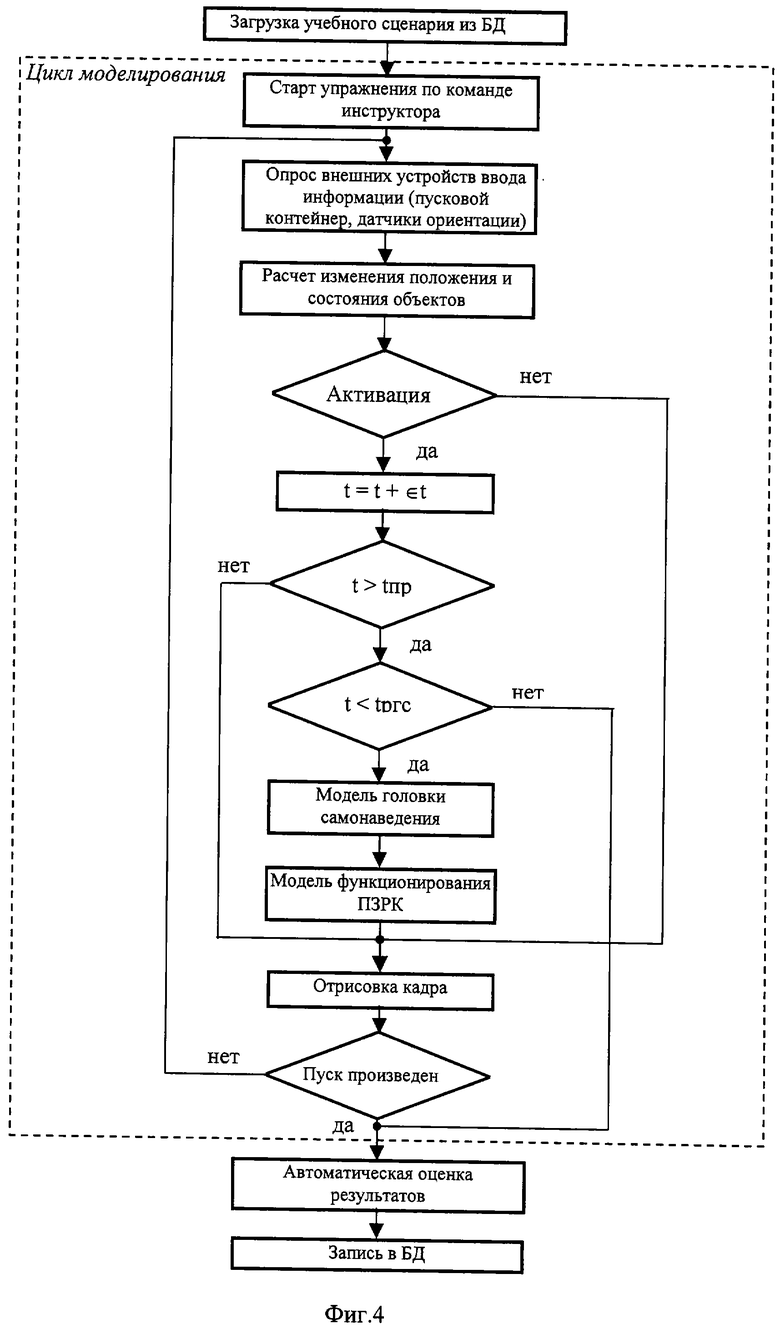
Реализуемая с помощью ЭВМ 1 программа в соответствии с алгоритмом, приведенным на фиг. 4, автоматически оценивает результат, причем в случае промаха определяет его причины. Результаты выполнения упражнения записывают в базу данных для ведения статистики прогресса обучаемого. При этом на фиг.4 обозначено: t - счетчик времени цикла моделирования; ∈t - приращение времени за один шаг цикла моделирования; tпp - время подготовки ПЗРК к работе; tpгc - время работы головки самонаведения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ ОТРАБОТКИ НАВЫКОВ ПРИМЕНЕНИЯ УПРАВЛЯЕМЫХ РАКЕТ | 2012 |
|
RU2511547C2 |
| Тренажер для подготовки операторов ПТРК с комбинированной системой наведения | 2018 |
|
RU2692024C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ ПЕРЕНОСНЫХ ЗЕНИТНЫХ РАКЕТНЫХ КОМПЛЕКСОВ | 2013 |
|
RU2561851C2 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ЛЕТЧИКОВ ПИЛОТИРОВАНИЮ УДАРНОГО ВЕРТОЛЕТА И ПРИМЕНЕНИЮ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ | 2008 |
|
RU2367026C1 |
| ТРЕНАЖЕР НАВОДЧИКОВ-ОПЕРАТОРОВ УСТАНОВОК ПУСКА РАКЕТ ИЛИ СТРЕЛЬБЫ ИЗ ОРУДИЙ И ПУЛЕМЕТОВ | 1999 |
|
RU2179698C2 |
| УЧЕБНЫЙ ТРЕНАЖЕР БОЕВЫХ РАСЧЕТОВ ЗЕНИТНО-РАКЕТНОГО КОМПЛЕКСА | 2022 |
|
RU2787411C1 |
| ТРЕНАЖЕР НАВОДЧИКОВ-ОПЕРАТОРОВ УСТАНОВОК ПУСКА РАКЕТ | 2006 |
|
RU2334935C2 |
| УЧЕБНЫЙ ИМИТАТОР БОЕВОГО СРЕДСТВА | 2021 |
|
RU2773419C1 |
| ИМИТАТОР БОЕВОГО СРЕДСТВА | 2011 |
|
RU2486427C1 |
| УЧЕБНЫЙ ТРЕНАЖЕР БОЕВЫХ РАСЧЕТОВ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА | 2014 |
|
RU2547955C1 |
Изобретение относится к учебно-тренировочным средствам, в частности, для отработки навыков применения переносных зенитно-ракетных комплексов, гранатометов и противотанковых управляемых ракет. Реализация устройства обеспечивает возможность контролируемого обучения пользованием индивидуальными переносными системами вооружения на всех этапах. Сущность изобретения заключается в том, что в него введены датчик установки имитатора пускового контейнера в штатном положении, а также два элемента И, элемент 6И, два ключа и коммутатор. Блок пусковых устройств своими с первого по пятый входами соединен соответственно с первым по пятый входами тренажера, первым и вторым выходами подключен соответственно к первому и второму входам коммутатора и одновременно соединен соответственно с третьим и четвертым входами ЭВМ, третьим выходом одновременно подключен к первому входу первого ключа и пятому входу ЭВМ, четвертым выходом одновременно соединен с первым входом элемента 6И и шестым входом ЭВМ, а пятым и шестым выходами подключен к первым входам соответственно первого и второго элементов И. Последние своими выходами соединены соответственно со вторым и третьим входами элемента 6И и одновременно подключены соответственно к седьмому и восьмому входам ЭВМ, а вторыми входами соединены соответственно с третьим и четвертым выходами ЭВМ. Элемент 6И четвертым и пятым входами подключен соответственно к выходам коммутатора и первого ключа, шестым входом соединен с пятым выходом ЭВМ, выходом подключен к первому входу второго ключа, вторым входом соединенного с шестым выходом ЭВМ, а выходом подключен к девятому входу ЭВМ. Второй вход первого ключа и третий вход коммутатора соответственно соединены с седьмым и восьмым выходами ЭВМ, девятым выходом одновременно подключенной ко входам первого и второго датчиков ориентации, а десятым и одиннадцатым входами соединенной соответственно с выходом датчика установки пускового контейнера в штатном положении и входом тренажера, группой входов подключенного к группе входов датчика установки пускового контейнера в штатном положении. 1 з.п.ф-лы, 8 ил.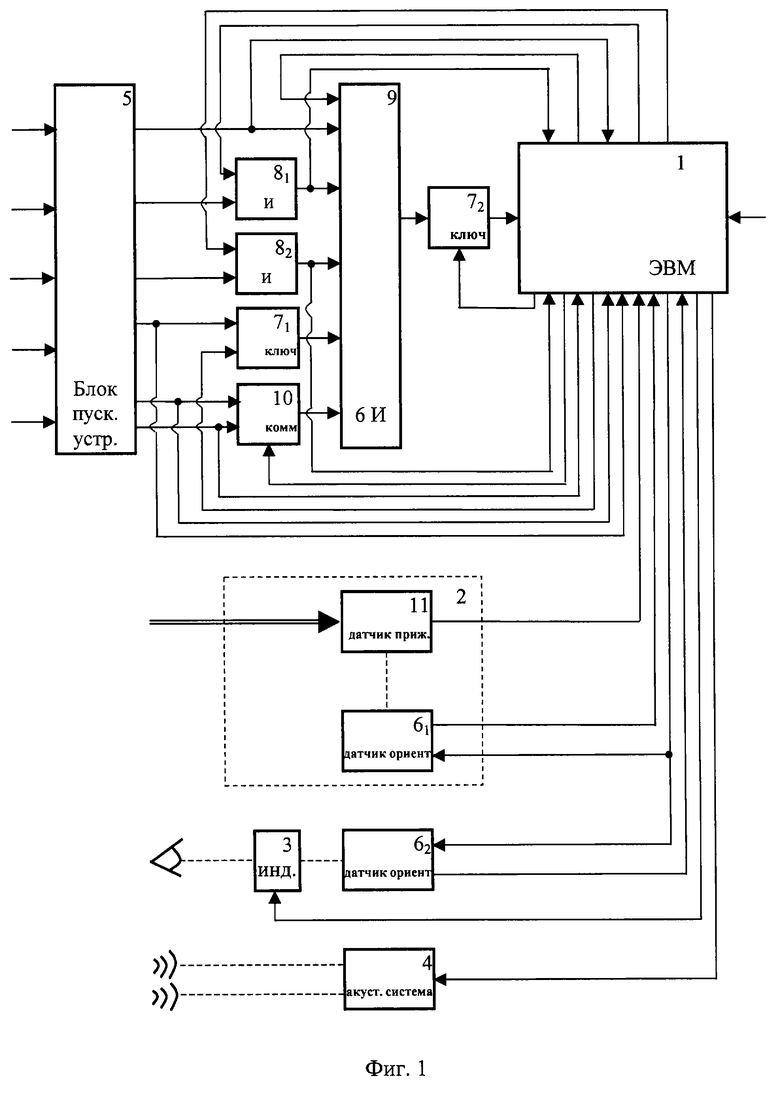
| Способ восстановления после подмерзания плодоносящих деревьев сливы домашней на сильнорослом подвое в саду интенсивного типа | 2021 |
|
RU2772908C1 |
| СТРЕЛКОВЫЙ ВИДЕОТРЕНАЖЕР | 1997 |
|
RU2132036C1 |
| Рельсовый подвесный к повозке башмак, предупреждающий обратный ход оторвавшегося от поезда вагона | 1929 |
|
SU20685A1 |
| Туннельная печь | 1986 |
|
SU1386830A1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ДЕФОРМАЦИЙ НИЖНЕЙ ЧЕЛЮСТИ | 1999 |
|
RU2152645C1 |
| US 4534735, 13.08.1985. | |||

