Изобретение относится к измерению разности давлений потоков жидкости, включая расход, объем и массу, а также все относящееся к способу улучшения точности измерения тарированием системы как единого целого по всему ее рабочему диапазону с использованием известных исходных потоков жидкости.
Уровень техники
Приборы измерения разности давления базовых потоков жидкости или измерительные системы для жидкости, заключенной в закрытый канал, такой как труба, обычно включают два основных элемента. Система содержит погруженный в жидкость датчик, каковой является первичным элементом системы, и вторичный элемент, включающий механическое и электронные устройства для преобразования воспринятых сигналов динамического воздействия жидкости в формат, удобный для получения необходимой информации, такой как расход потока, объем потока и масса текучей жидкости.
Первичные датчики, которые воспринимают разность давлений жидкости в потоке, включают такой особый тип, как усредняющие трубки Пито, измерительные диафрагмы, расходомерные сопла и измерители Вентури.
Вторичная часть системы может включать датчик разности давлений (РД), датчик статического давления, датчик температуры жидкости и компьютер потока. Исходный электрический выходной сигнал этих датчиков обычно переработан в сигнал, который преобразован для последующей электронной обработки в дополнительных устройствах, таких как компьютер потока. Комбинация датчика и последующих электронных устройств, таких как аналого-цифровые преобразователи, усилители и центральное обрабатывающее устройство, часто объединяют в одно устройство, как РД-преобразователь, и этот термин будет также использован в этом описании. Часто первичный датчик и вторичный элемент или РД-преобразователь достаточно широко разделены физически и обычно рассматриваются как отдельные единицы, в том смысле, что два элемента оттарированы отдельно и представляют свой собственный стандарт точности.
Предварительно, для понимания существующего положения дел в технике измерения характеристик потока жидкости и достижимой точности с приемлемыми системами в аспекте настоящего изобретения, полезно рассмотреть альтернативные методы оценки точности измерительных приборов.
Известны два метода представления точности. Первый обычно определяют как "процент считывания" или "процент значения". Этот метод определяет ошибку при специальном считывании. Использование этого метода в измерительных приборах означает, что приборы выдают ошибку, основанную на их считывании по всему рабочему диапазону. Второй метод известен как "процент полной шкалы" (процент ПШ) стандартной точности. Этот метод связан с ошибкой в приборе, когда производится измерение количества, которое представляет 100% выходного сигнала. Эквивалент ошибки "процентного значения" для прибора, оттарированного с "процентом полной шкалы", значения точности подсчитывается с помощью следующего равенства:
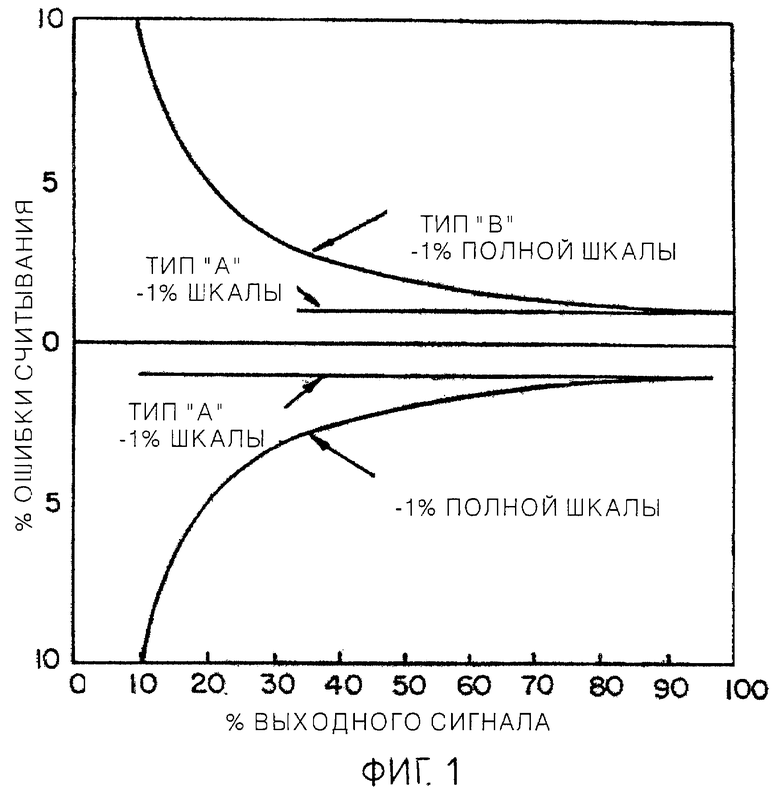
Различия между этими двумя методами ранжирования точности не очевидны, пока они не отражены на диаграмме. На фиг.1 показаны результаты каждого из двух методов для выражения ошибки измерения. Кривая А показывает 1% ошибки считывания, тогда как кривая В показывает 1% ошибки полной шкалы. Обе кривые начерчены с отклонением 10: 1. Из примера видно, что "±1% ошибки полной шкалы" является эквивалентом "±5% ошибки значения" при 20% уровня полного диапазона (отклонение 5: 1). Отклонение расхода - это отношение наивысшего значения расхода, измеренного системой, к наинизшему измеренному значению расхода при некотором значении точности. Эта величина обычно выражается в одну строку с двоеточием, как 10:1 для отношения отклонения 10. Большинство измерительных приборов потока имеют минимальный и максимальный пределы потока, которые могут быть измерены с данным пределом точности. Типичный расход потока находится между этими значениями.
В приборах, измеряющих разность давлений, расход потока Q определяется в соответствии с формулой  где С - константа, а PD - разность между измеренными высшим и низшим давлениями жидкости. Различные виды датчиков разности давления имеют их собственные погрешности и отклонения, но всем им присущ свойственный им недостаток неспособности обеспечить получение выходных сигналов давления жидкости, которые полностью взаимосвязаны с расходом потока жидкости в соответствии с установленной математической формулой по всей ширине рабочего диапазона. Вызываемые ошибки и крайние рабочие характеристики этих датчиков разности давлений потока определяются и изменяются установочными параметрами каждого прибора, такими как форма и размеры датчика, расположение и число отверстий давления, а также расположение датчика внутри трубы, по которой протекает жидкость. На фиг.3 представлена кривая, иллюстрирующая сплошной линией теоретическую зависимость между потоком жидкости Q и разностью давлений PD. Пунктирная кривая линия показывает ту же взаимозависимость, но с внутренними ошибками первичного измеряющего элемента, принятыми во внимание. Усредняющая трубка Пито в качестве первичного датчика или другой датчик PD могут показать характеристики, очень близкие к теоретическим по всей ширине диапазона, но даже такие виды датчиков не могут показать лучше, чем ±1% считывания при отклонении 10:1.
где С - константа, а PD - разность между измеренными высшим и низшим давлениями жидкости. Различные виды датчиков разности давления имеют их собственные погрешности и отклонения, но всем им присущ свойственный им недостаток неспособности обеспечить получение выходных сигналов давления жидкости, которые полностью взаимосвязаны с расходом потока жидкости в соответствии с установленной математической формулой по всей ширине рабочего диапазона. Вызываемые ошибки и крайние рабочие характеристики этих датчиков разности давлений потока определяются и изменяются установочными параметрами каждого прибора, такими как форма и размеры датчика, расположение и число отверстий давления, а также расположение датчика внутри трубы, по которой протекает жидкость. На фиг.3 представлена кривая, иллюстрирующая сплошной линией теоретическую зависимость между потоком жидкости Q и разностью давлений PD. Пунктирная кривая линия показывает ту же взаимозависимость, но с внутренними ошибками первичного измеряющего элемента, принятыми во внимание. Усредняющая трубка Пито в качестве первичного датчика или другой датчик PD могут показать характеристики, очень близкие к теоретическим по всей ширине диапазона, но даже такие виды датчиков не могут показать лучше, чем ±1% считывания при отклонении 10:1.
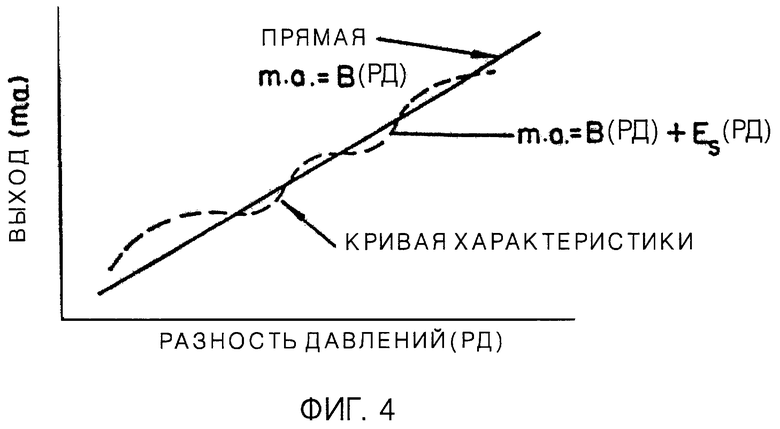
В дополнение к ошибке, выдаваемой первичным элементом, каждый компонент вторичного элемента системы измерения потока способен внести ошибку в систему. Хотя ошибка внесена всеми компонентами вторичного элемента, большая часть ее относится к нелинейности преобразователя. Линейность, в этом смысле, это способность компонентов выдавать линейную или близкую к ней зависимость между действительным физическим входом и выходом PD-датчика. Другие вторичные компоненты также вносят свою лепту в нелинейность, что проявляется в ошибке вторичного элемента. Сплошная кривая на фиг.4 показывает идеальную линейность PD-преобразователя, в соответствии с формулой:
м.а.=В•PD,
где м.а. - выход вторичного элемента в миллиамперах, В - константа и PD - разность давлений жидкости. Пунктирная линия кривой на фиг.4 иллюстрирует нелинейность вторичного элемента измерителя потока (без учета статического давления или температуры жидкости) в соответствии с формулой:
м.а.=В•PD+Es(PD),
где Es - % ошибки разности давления выдаваемой вторичным элементом. Поскольку может быть несколько различных вариантов представления линейности, принято обозначение, представляющее независимую линейность вторичного элемента измерителя потока. Прямая линия использована на фиг.5 для минимизации максимального отклонения фактической характеристики. График этой фигуры нормализовали, чтобы показать линейность как процент считывания отклонения ошибки от кривой нулевой ошибки, которая была бы прямой горизонтальной линией.
В процессе измерения потока учитывают нелинейность вторичного элемента и стараются компенсировать ее путем "характеризования" PD-преобразователя. Чаще всего это делают путем использования балласта или с помощью другой формы оттарированного источника PD, моделируя различные давления на диафрагме датчика и затем модифицируя электрический выход для исправления имеющихся расхождений. В таком процессе, однако, ни действительный поток жидкости, ни отклоняющиеся характеристики первичного датчика не учитываются в попытках линеаризации.
Соответственно, когда независимо оттарированные первичный и вторичный элементы соединяются, результирующая точность измерительной системы должна быть определена общей ошибкой первичного и вторичного элементов по выбранному диапазону работы в соответствии с правилом "корень квадратный суммы квадратов": ,
,
где Ep=% ошибки в потоке первичного элемента; и
Es=% ошибки в потоке вторичного,
Es=Epd 2+Ep 2+Eт 2
где Epd - ошибка датчика разности давлений;
Ep - ошибка датчика статического давления;
Ет - ошибка температурного датчика.
Ошибка первичного элемента входит непосредственно в ошибку в потоке, в котором вторичный прибор вносит ошибку в разность давлений (PD), которая является квадратом ошибки в потоке. Процент ошибки в PD будет зависеть от процента шкалы, как показано на фиг.1. Для PD-преобразователя или измерителя вклад в расчетную ошибку потока вторичного элемента определяется по выражению:
где %Efs - % ошибки (точности) полной шкалы PD-преобразователя;
%PD - % шкалы, в которой работает PD-преобразователь;
Ep и Ет подсчитываются аналогично.
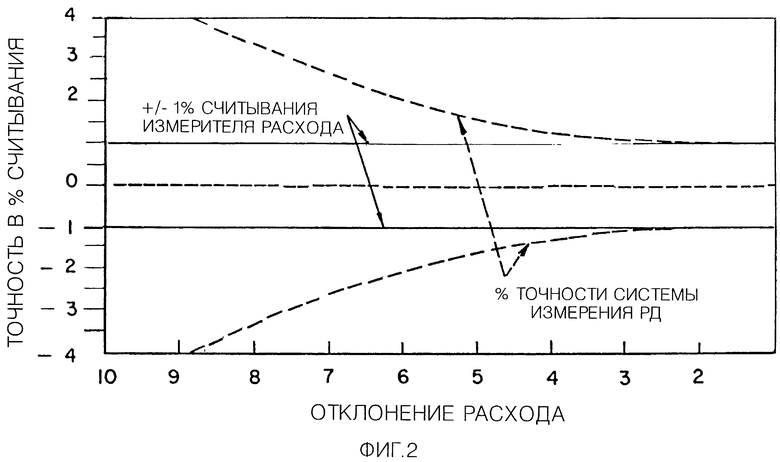
Для определения ошибки в потоке при минимальной шкале для желаемого отклонения потока, равенство 3 должно быть заменено равенством 2. Для лучшей иллюстрации сказанного обратимся к фиг.2, где точность считывающей поток системы определена как функция отклонения для различных типов измерителей потока.
Пример измерителя потока по % точности, где нет вторичного элемента, выдающего в систему ошибку, показан сплошной линией. Ошибка измерительной диафрагмы или другого вида датчика разности давлений, работающего с преобразователем PD, подсчитана с использованием равенств 2 и 3, приведенных выше, и изображена на графике фиг.2 пунктирной линией. В этом примере кривая датчика измерительной диафрагмы сама выдает ± 1% ошибки считывания (Ep) и вторичный элемент имеет ± 0,1% ошибки полной шкалы (Es).
После построения пунктирной кривой на фиг.2, проблема предварительного обычного раздельного тарирования первичного и вторичного элементов измерителя потока очевидна. Ошибки отдельных элементов являются дополнительными к системе измерения потока, создающие комбинацию, при которой общая ошибка не может быть меньше, чем наименьшая точность компонентов системы.
Исходя из этого главный объект изобретения - обеспечить синергический метод получения высшей точности измерительной системы тарирования совместной комбинации первичного и вторичного элементов системы для фактического потока жидкости.
Следующий объект изобретения - обеспечить способ тарирования измерительной системы результатами гораздо лучшей точности чем та, что получена из корня квадратного суммы квадратов индивидуально оттарированных элементов системы.
Другой объект изобретения - обеспечить способ тарирования измерительной системы результатами большей точности при более широких отклонениях потока.
Следующий объект изобретения - обеспечение процесса тарирования измерительной системы потока, при котором гибкость потенциала линеаризации вторичного элемента хорошо функционирует для корректировки ошибки в потоке первичного, а также для корректировки нелинейности собственных компонентов вторичного элемента.
Другой и дальнейшие объекты, особенности и преимущества изобретения будут ясны из детального описания преимущественных выриантов изобретения.
Наиболее близкими аналогами изобретения являются следующие:
брошюра "Dieterich Standard Annubar Flow Measurement Systems", где на стр. 2 и 3 (не пронумерованы) приведена аналогичная описываемому система измерения потока, и на стр. 9 - преобразователи давления, а их точность спорна. Эта приведенная измерительная система не предполагает тарирование и метод линеаризации настоящего изобретения;
каталог "Dieterich Standard Diamond II Annubar Flow sensors", где на стр. 3 показана диаграмма системы измерения потока, которая аналогична общей схеме данного изобретения, но без метода линеаризации как в этом изобретении и на стр.7 точность первичного датчика спорна;
патент США 5111827 автора Borje Rantala, раскрывающий в берущем пробу дыхательном приборе микропроцессор для регулировки уровня потока в соответствии с составом газа, как предназначено газовым анализатором;
патент США 4836019 автора Floyd W. Hagen, раскрывающий датчик показателей воздуха, имеющий компьютер, запрограммированный подбирать по таблице погрешностей тарировочные кривые для различных датчиков. Компьютер запрограммирован обеспечивать соответствующей корректировкой сигналы датчика давления.
патент США 2869367 автора D.W. Moore, описывающий систему, использующую чувствительную к давлению диафрагму для изменения электрического сопротивления в соответствии с линеаризованным откликом характеристики системы.
На фиг. 1 представлен график взаимосвязи между "процентом считывания" и "процентом полного масштаба" системы определения точности измерения.
На фиг.2 - график, показывающий процент считывания точности системы потока, как функция отклонения для двух различных типов измерительных приборов потока жидкости.
На фиг. 3 изображена кривая диаграммы, иллюстрирующая сплошной линией теоретическую зависимость между потоком жидкости Q и разностью давления PD. Пунктирная линия иллюстрирует ошибку первичного прибора измерения потока.
На фиг.4 представлен пояснительный график типичной кривой характеристики выхода преобразователя (вторичного) разности давления, как связанный с разностью давлений. Сплошная линия представляет линейную взамосвязь между разностью давлений и электрическим выходом системы. Штриховая линия является образцовой фактической кривой, принимающей во внимание ошибку Es, представленную нелинейностью во вторичном элементе.
На фиг. 5 представлена нормализованная кривая, показывающая линейность выхода системы, как процент считывания ошибки отклонения от идеальной линейной кривой, которая могла бы быть представлена прямой горизонтальной линией с нулевой ошибкой.
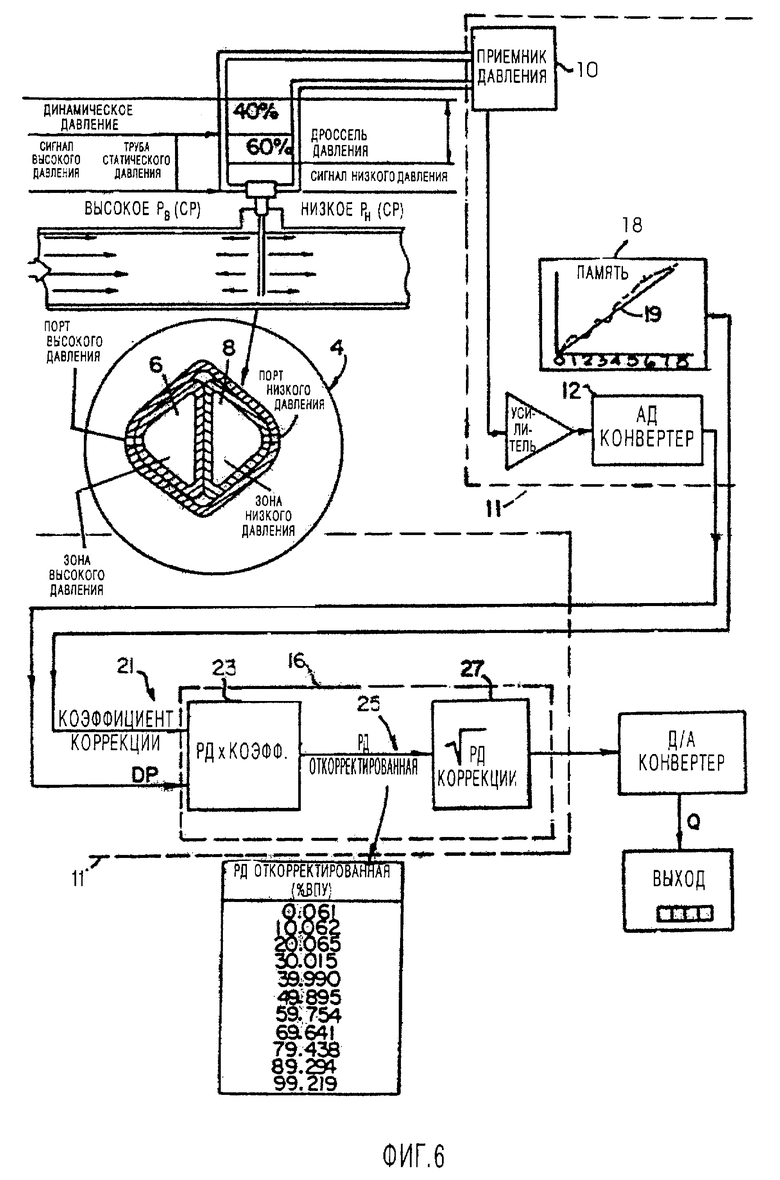
На фиг. 6 представлена блок-схема типичной измерительной системы PD скорости потока жидкости, способной использовать метод тарирования настоящего изобретения.
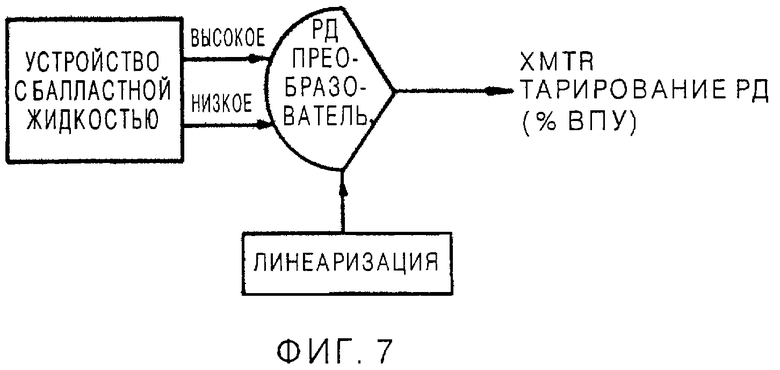
На фиг. 7 схематически представлена блок-схема последовательности начального тарирования PD-преобразователя, использованного в системе, показанной на фиг.6.
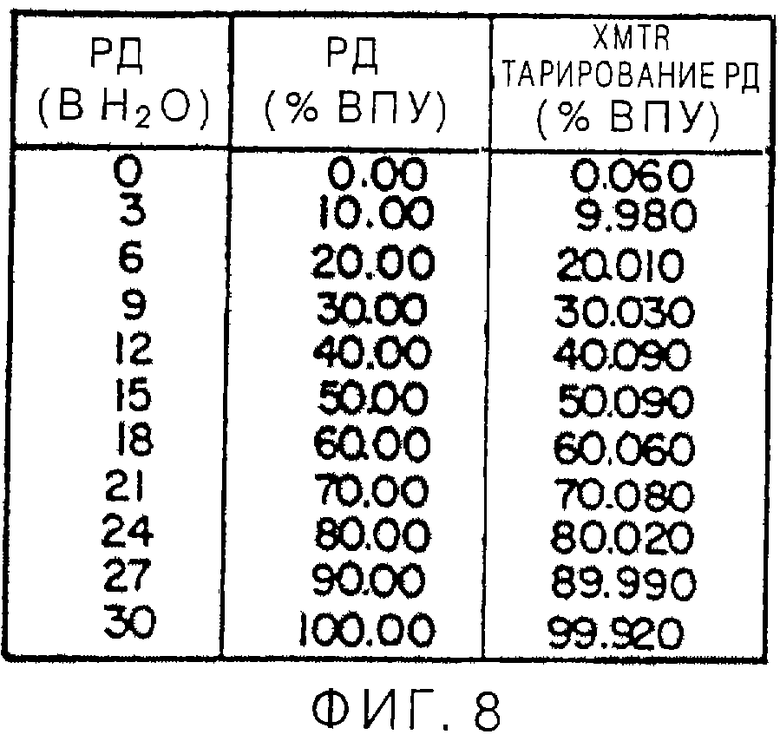
На фиг.8 представлена образцовая таблица, показывающая в процентах значимость для разности давлений при десяти процентах увеличения сверх действующего уровня PD-преобразователя, где ВПУ - верхний предел уровня преобразователя, измеренный в дюймах водяного столба. Таблица показывает соответствующие значимости характеристики начального преобразователя, выполненной как показано на фиг.7 (тарир. PD) и скорректированную PD (PD скор.), показанную на фиг.6.
На фиг. 9 представлена блок-схема способа тарирования настоящего изобретения с образцовыми таблицами значимостей, взятых из отмеченных точек процесса.
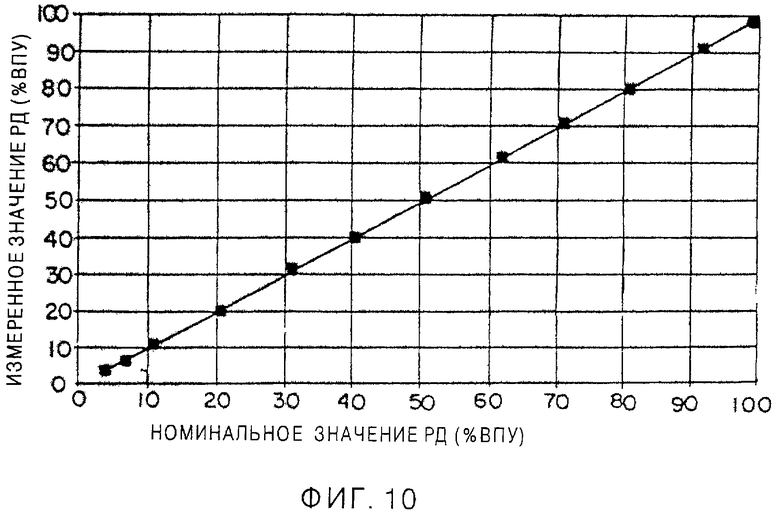
На фиг. 10 представлен график, показывающий взаимосвязь между PDизмер., как процента верхнего предела уровня (ВПУ) и нормализованной PD или PD', как процент ВПУ.
Сущность изобретения
Способ, в соответствии с настоящим изобретением, тарирует и характеризует систему измерения разности давлений потока как устройство, использующее фактически оттарированный расход в первичном датчике. Тарируемая система, как целое, при фактическом расходе жидкости вместо основанной на тарировании первичного и вторичного элементов индивидуально, новый и синергетический эффект, произведенный при помощи системы, точности и отклонения лучше, чем полученный из корня квадратного суммы квадратов индивидуально оттарированных элементов системы.
Подробное описание
Прежде чем обратиться к деталям метода тарирования и характеризования по настоящему изобретению, краткое описание системы измерения потока будет сделано, в котором метод тарирования мог бы быть использован в соответствии с сущностью изобретения.
На фиг.6 представлена блок-схема типичной зависимости разности давлений системы измерения потока от типа, к которому метод тарирования по настоящему изобретению особенно подходит. В этой измерительной системе тип трубки Пито датчика 4 разности давлений потока функционирует как первичный элемент, однако традиционные приборы разности давлений, такие как измерительная диафрагма, трубка Вентури или форсунка потока могут также работать как датчики разности давлений. Показанный тип трубки Пито описан в патенте США 4154100 автора James B. Harbaugh и др. и в патенте США 4559836 автора Darrel F. Coletan и др., которые более полно объясняют датчик разности давлений 4 на фиг. 6. Обращенная против течения часть трубки Пито 4 воспринимает среднее значение воздействия давления текущей жидкости и устанавливает верхнюю величину давления, Обращенная по течению часть трубки Пито устанавливает нижнее значение давления. Верхнее и нижнее давления жидкости передаются от камер давления б и 8 датчика потока 4 к приемнику давления 10, первому элементу преобразователя разности давлений 11. Приемник давления преобразует соответственно высокое и низкое давления жидкости, исходящие из первичного датчика, в электрический сигнал, чей характер является функцией разности давлений (PD), что представляет собой разницу между воспринятыми высоким и низким давлениями жидкости. Типичный приемник мог бы быть оснащен воспринимающим элементом содержащим силиконовую диафрагму, в поверхности которой внедрены пьезорезисторы, которые содержат электрический мостик, чей выход является аналогичным разности давлений, приложенной к приемнику.
Другие виды PD-преобразователей, которые могут быть использованы, это емкостные или переменные сопротивления. Электрический аналоговый сигнал от приемника давления 10 трансформируется в аналого-цифровом конвертере 12 в цифровой сигнал для подачи в центральный процессор (ЦП) 16. Центральный процессор 16 выполняет операцию корня квадратного так же, как это делают другие калькуляторы, включающие систему коррекции ошибок, требуемую для получения точного конечного выходного сигнала системы измерения потока.
После тарирования, в соответствии со способом настоящего изобретения, и в течение процесса при фактических условиях измерения потока, электрический сигнал, представляющий разность давлений жидкости, обращается к заложенной в EEPROM-памяти 18 тарировочной информации, которая может быть представлена в форме таблицы или формулы полинома 19 для внесения общих поправок от ошибок в этом сигнале, которые являются результатом нелинейности в преобразователе 11 и аберрацией в работе первичного датчика 4. Полученная информация, заложенная в EEPROM-память для обеспечения этих коррекций есть результат тарировки и характеристики процесса по настоящему изобретению и будет в дальнейшем рассмотрен в деталях. Откорректированный PD-сигнал, далее обработанный ЦП в позиции, обозначенной 27, определяет корень квадратный откорректированной PD. Это значение определяло расход Q, который затем считывался соответствующим приспособлением 30 или применялся в дальнейшем процессе или обработке.
Имея описанную в общих чертах функцию измерителя потока в действительном процессе, способ, применяющий тарировочные коэфициенты, которые заложены в памяти EEPROM, будут теперь описаны.
Как отмечено ранее, первичный и вторичный элементы выделяют ошибки и каждая ошибка отрицательно влияет на точность системы. Обеспечивающий коррекцию для обоих этих источников ошибок одновременно, окончательный сигнал системы измерения потока будет иметь большую точность, чем это было бы, с другой стороны, при тарировании первичного и вторичного элементов отдельно.
Для понижения ошибки, вносимой первичным сенсором, обратимся снова к фиг. 3. Как для вторичного, нелинейный выход PD-преобразователя изначально линеаризован против оттарированного PD-источника так же, как весовой тестер. См. фиг.7, иллюстрирующую начальный процесс линеаризации PD-преобразователя. С этой позиции можно заметить, что линеаризация - эта форма тарирования, которая использована, когда требуемый выход является линейной функцией входа прибора. Бывают ситуации, однако, когда требуемый выход - это экспоненциальная функция или функция полинома или какая-либо другая функция входа. Следовательно, в общем виде, способ тарирования настоящего изобретения, которое перекрывает все эти функции, термины "характеризующий" и "характеристика" могут быть привычно широкими, включая линеаризацию так же, как другие упомянутые.
Начальный процесс линеаризации характеризует выход преобразователя из известной разности сил, обеспеченных оттарированным PD-источником. Как результат этого начального характеризования, выход преобразователя будет направлен к оттарированной PD. Примером результата такого начального тарирования служит фиг.8, где показана отттарированная PD, где увеличение значения разницы давления от 0 до 100% верхнего предельного уровня (ВПУ) преобразователя, источником сигнала, для которого служит оттарированная PD. Как часть процесса начального тарирования PDтap. помещено в неизменяемую память ЦПУ преобразователя. См. фиг.6, показывающую центральный прибор процесса.
Однако, в соответствии с объектами настоящего изобретения, не достаточно провести линеаризацию только PD-преобразователя. Объекты изобретения реализованы до конца характеризующим выходом PD системы, выходом PDтap.-преобразователя, плюс коэффициентом потока К для первичного сенсора, таким образом:
PDтap. + К --> PDoткорр екти рован.
Другими словами, начальное характеризование PD-преобразователя еще более усилено в контексте общей измерительной системы, принимая во внимание при тарировании варьирование значения К первичного сенсора.
Это завершено помещением одного или более корректирующих коэффициентов в EEPROM-память 18 и использующей эти коэффициенты для характеризования измерительной системы как единого целого.
Обращение к фиг. 9 облегчит понимание того, как коэффициенты коррекции 21, помещенные в EEPROM, устанавливаются. Номера в таблицах, которые отнесены к различным частям диаграммы, являются только образцами для цели лучшего понимания процесса. Первое значение К для выбранного различного числа потоков определено. Номер значений потока жидкости выбран для процесса тарирования, как критерий оценки. Для целей данного описания будет выбрано одиннадцать, охватывающих рабочий уровень системы, каждый шаг увеличивается на 10%, начиная с нуля.
Хотя упомянутые расходы жидкости могут быть получены различными способами, предпочтительный вариант включает в себя использование высокоточной лабораторной весовой емкости, которая определяет массовый расход непосредственно. Различные выбранные контрольные потоки направлены в трубу, имеющую первичный сенсор, такой как усредняющая труба Пито 4 на фиг.6. Воспринятые сигналы высокого и низкого давления направлены к уже начально оттарированному PD-преобразователю, из которого получен сигнал разности давлений РDизмеренный (РDизм.). Этот сигнал, вместе с входящим сигналом Q, представляющим оттарированный контрольный расход жидкости из весовой емкости, используется для подсчета фактического значения К первичного датчика, Кфакт., в соответствии с формулой:
Из Кфакт. значение для каждого выбранного уровня расхода К-среднее (Кср.) определяется известными методами статистического анализа. Следующим шагом определяются номинальные значения PD и PD' в соответствии с формулой:
Для последующего определения номинального значения PD для каждого выбранного уровня расхода использован статистический регрессионный анализ с одним или несколькими корректирующими коэффициентами для системы, которые помещены в память EEPROM. Предпочтительно использование в регрессии метода наименьших квадратов для проведения линии между установленными точками, каждая из которых представляет соответствующее номинальное значение PD для одного измеренного значения PD.
Зависимой переменной в анализах является измеренная величина PD (PDизм.), тогда как независимая измеренная - это номинальное значение PD, PD'. В соответствии с хорошо известными методами уравнения регрессионных анализов могут быть расширены для повышения точности использованием дополнительных независимых переменных, PD'2, PD'3. PD4, PD5. Уравнения регрессионного анализа дают Х переменных, показанных в таблице фиг.9, с их примерными значениями коэффициентов. Эти коэффициенты, которые необходимы для использования с начальными тарировочными значениями, помещены в EEPROM-память преобразователя для определения новых тарировочных значений:
PDкop.= начальное значение + Хвар.1(PDтap.) + Хвар.2(PDтap.)2 + ... + Хвар.5(PDтap.)5,
где Хвар. - коэффициент регрессии для n-ой независимой переменной: начальное значение - точка, где прямая линия пересекает ось X.
В зависимости от требуемой точности, 2, 3 или 6 независимых переменных могут быть использованы вместо пяти, как в данном примере.
Когда память задействована в фактической работе системы, конечное значение откорректированной PD (PDкор.) используется для определения точного выхода расхода.
Тарирование осуществлено по всему диапазону потока измерительной системы, устанавливающей точность по меньшей мере ± 0,5% по всему оттарированному диапазону потока. Подсчитанные значения коррекции (откорректированная разность давлений) заменяют коррекции в EEPROM-памяти, которые были установлены в течение начального характеризования преобразователя, как показано на фиг.7. Характеризующий измеритель расхода с методом тарирования дает возможность электрическому выходу 27 измерителя отслеживать истинный контрольный расход, таким образом компенсирующий все ошибки, соответствующие нелинейности и коэффициенту расхода первичной системы, как показано на фиг.10.


Изобретение относится к измерению разности давлений потока жидкости. В системе измерения потока жидкости, включающей датчик потока и электронный преобразователь сигналов высокого и низкого давления, реализован процесс тарирования системы как единого целого, включающий применение множества известных расходов эталонного потока, установление корректирующих коэффициентов, которые будут обеспечивать линеаризацию взаимосвязи между расходом потока жидкости и электрическим выходным сигналом электронного преобразователя, помещения корректирующих коэффициентов в неизменяемую память микропроцессора. Технический результат - повышение точности измерений. 6 с. и 9 з.п.ф-лы, 10 ил.
| US 5479812, 02.01.1996 | |||
| US 4821551, 18.04.1989 | |||
| US 4836019, 06.06.1989 | |||
| US 5559836, 24.12.1985 | |||
| RU 2055322 С1, 27.02.1996. |

