Изобретение относится к системам автоматического управления и может быть использовано в образцах техники, имеющих фазовую связь каналов объекта управления, а также в установках для их научного исследования.
Известен способ определения фазовой связи каналов [1], заключающийся в том, что определяют величину фазового запаздывания рулевого привода на частоте вращения летательного аппарата по крену. Величина фазовой связи каналов определяется как фазовое запаздывание рулевого привода на средней частоте вращения летательного аппарата по крену.
Блок для осуществления указанного способа определения фазовой связи каналов [1] позволяет оценить по входным и выходным сигналам рулевого привода величину его фазового запаздывания на средней частоте вращения летательного аппарата по крену.
Известен способ управления движущимся объектом [1], заключающийся в том, что выделяют координаты объекта, определяют величину ошибки, пропорциональную разности между входной координатой и координатой объекта, формируют команды управления объектом в соответствии с величиной ошибки и осуществляют начальный разворот вектора команд управления на величину фазовой связи каналов.
Система управления для осуществления указанного способа [1] содержит последовательно соединенные приемные устройства входного сигнала и выходного сигнала, устройство выработки команд управления, устройство телеуправления, систему управления нормальными перегрузками и блок начального разворота рамок гироскопа на заданную угловую величину.
Недостатком указанных технических решений является низкая точность работы системы управления из-за фазовой связи каналов объекта, вызванной изменяющейся инерционностью рулевых приводов и неточностью работы гироскопа.
При наличии связи каналов в аппаратуре управления летательного аппарата (фазовых запаздываний рулевого привода, уходов гироскопа) вектор команды на летательном аппарате разворачивается на угол связи и выходит из плоскости наведения, т.е. появляется ложная составляющая команды, перпендикулярная плоскости наведения. Плоскость наведения летательного аппарата - плоскость, содержащая вектор скорости объекта слежения и точку стояния комплекса наведения летательного аппарата. Вследствие работы системы управления с двумя астатизмами, которой является система управления летательным аппаратом, по окончании переходного процесса в аппаратуре выработки команд создается команда, компенсирующая ложную составляющую команды, т.е. вектор команды, подаваемый на летательный аппарат, разворачивается на угол, равный по величине углу связи каналов и противоположный ему по знаку.
Наличие связи каналов приводит к увеличению колебаний летательного аппарата под действием возмущений и смещению летательного аппарата в вертикальной и горизонтальной плоскостях относительно его траектории движения.
Наиболее близким к заявляемым техническим решениям (способ определения и блок определения) является способ определения фазовой связи каналов [2], заключающийся в измерении команд управления и выходных координат рулевого привода в горизонтальных и вертикальных плоскостях управления, определении с помощью преобразований Фурье фазового запаздывания, вносимого рулевыми приводами на частоте вращения летательного аппарата.
Блок [2] для осуществления указанного способа содержит два преобразователя Фурье (4 сглаживающих фильтра, 4 триггера и интегратор), три сумматора, интегратор. Противоположные ортогональные составляющие вектора команд и вектора координат рулевых приводов перемножаются между собой, полученные два произведения сравниваются между собой и полученная разность подается на интегратор, на выходе которого получается сигнал, пропорциональный величине фазового сдвига, вносимого рулевыми приводами на частоте вращения летательного аппарата.
Наиболее близким к заявляемым техническим решениям (двумерному способу управления и двумерной системе управления) являются двумерный способ управления летательным аппаратом и двумерная система управления летательным аппаратом [3]. Двумерный способ управления летательным аппаратом заключается в том, что выделяют координаты объекта, определяют величину ошибки, пропорциональную разности между входной координатой и координатой объекта, формируют команды управления объектом в соответствии с величиной ошибки, формируют команды компенсации динамической ошибки, суммируют их с командами управления объектом. Для компенсации фазовой связи каналов полученную суммарную команду в горизонтальном канале возводят в квадрат и вычитают из суммарной команды в вертикальном канале.
Двумерная система управления летательным аппаратом [3] для осуществления указанного способа содержит вертикальный и горизонтальный каналы управления. В каждом канале управления имеется последовательно соединенные блок управления, сумматор, на второй вход которого подается команда компенсации динамической ошибки, объект управления и кинематическое звено. Сигнал с выхода сумматора горизонтального канала умножается сам на себя (возводится в квадрат) и через усилитель с регулируемым коэффициентом передачи подается на третий вход сумматора вертикального канала.
Недостатками указанных технических решений является следующее.
Техническое решение (способ и блок) по [2] определяет фазовую связь каналов, вносимую только рулевыми приводами. Расфазировка исполнительной системы координат летательного аппарата, вызванная уходом гироскопического датчика крена летательного аппарата, остается неопределенной.
Техническое решение (способ и система) по [3] может компенсировать фазовую связь каналов только при наличии команд компенсации ошибки в вертикальном канале, например компенсацию веса. В этом случае осуществляется компенсация связи каналов путем вычитания квадрата горизонтальной команды из команды вертикальной, за счет чего вектор команды поворачивается в сторону, противоположную направлению связи каналов в аппаратуре летательного аппарата. Устройство по техническому решению [3], как следует из приведенного описания, имеет переменные параметры по коэффициенту передачи и углу разворота вектора команд, которые зависят от величины команд компенсации, и принципиально не может полностью компенсировать связь каналов, т.к. при полной компенсации связи сигнал, подаваемый из горизонтального канала в вертикальный, обнуляется. Наличие команд компенсации в горизонтальном канале, даже при отсутствии фазовой связи каналов, приводит к смещению летательного аппарата в вертикальной плоскости относительно его траектории движения.
Кроме того, метод компенсации [3] обладает низкой точностью (возможен даже срыв в управлении) работы системы управления при наличии больших команд компенсации динамической ошибки одновременно в обоих (вертикальном и горизонтальном) каналах управления в условиях воздействия возмущающих факторов и помех.
Задачей изобретения является повышение точности работы системы управления при фазовой связи каналов объекта и наличии больших команд компенсации динамической ошибки одновременно в обоих (вертикальном и горизонтальном) каналах управления. Поставленная задача решается за счет определения пространственного положения вектора команд компенсации ошибки и вектора команд управления. Определение угла разворота вектора команд в исполнительной системе координат летательного аппарата производят измерением угла рассогласования вектора команд, подаваемых на летательный аппарат, и вектора команд компенсации динамической ошибки, лежащего в плоскости наведения летательного аппарата.
Решение поставленной задачи достигается тем, что в способе определения фазовой связи каналов, включающем измерение команд компенсации динамической ошибки и команд управления объектом, по выделенным командам компенсации динамической ошибки и командам управления объектом определяют угол разворота между командами компенсации динамической ошибки и командами управления объектом.
Для осуществления указанного способа в блок определения фазовой связи, содержащий последовательно соединенные первое устройство умножения и первый сумматор, а также второе устройство умножения, выход которого соединен со вторым входом первого сумматора, введены последовательно соединенные второй сумматор, первый вход которого соединен с выходом второго устройства умножения, и устройство вычисления угла, второй вход которого соединен с выходом первого сумматора, а второй вход второго сумматора соединен с выходом первого устройства умножения, при этом первый и второй входы первого устройства умножения являются первым и четвертым входами блока определения фазовой связи, первый и второй входы второго устройства умножения являются вторым и третьим входами блока определения фазовой связи, а выход устройства вычисления угла является выходом блока определения фазовой связи.
Для осуществления указанного способа в блок определения фазовой связи, содержащий устройство суммирования, введены первое и второе устройство вычисления угла, выходы которых соединены с первым и вторым входами устройства суммирования, при этом первый и второй входы первого устройства вычисления угла являются первым и вторым входами блока определения фазовой связи, первый и второй входы второго устройства вычисления угла являются третьим и четвертым входами блока определения фазовой связи, а выход устройства суммирования является выходом блока определения фазовой связи.
Решение поставленной задачи достигается тем, что в двумерном способе управления, включающем формирование команд управления объектом и формирование команд компенсации динамической ошибки, определяют фазовый сдвиг между командами компенсации динамической ошибки и командами управления объектом и компенсируют фазовый сдвиг в командах управления объектом.
Для осуществления указанного способа в двумерную систему управления, содержащую блок компенсации ошибки, блок управления, первый и второй входы которого соединены соответственно с первым и вторым выходом блока компенсации ошибки, и объект управления, первый и второй выходы которого соединены соответственно с третьим и четвертым входом блока управления, введены блок определения фазовой связи, первый и второй входы которого соединены соответственно с первым и вторым выходом блока компенсации ошибки, и блок компенсации фазовой связи, первый и второй входы которого соединены соответственно с первым и вторым выходом блока управления и с третьим и четвертым входами блока определения фазовой связи, при этом первый и второй входы объекта управления соединены соответственно с первым и вторым выходом блока компенсации фазовой связи, третий вход которого соединен с выходом блока определения фазовой связи.
В заявляемых технических решениях с целью повышения точности работы системы управления при фазовой связи каналов в условиях отфильтрованых от шумов входных сигналов осуществляется определение угла разворота между вектором команд компенсации ошибки и вектором команд управления, определение величины фазовой связи каналов и формирование соответствующим образом компенсации фазовой связи каналов.
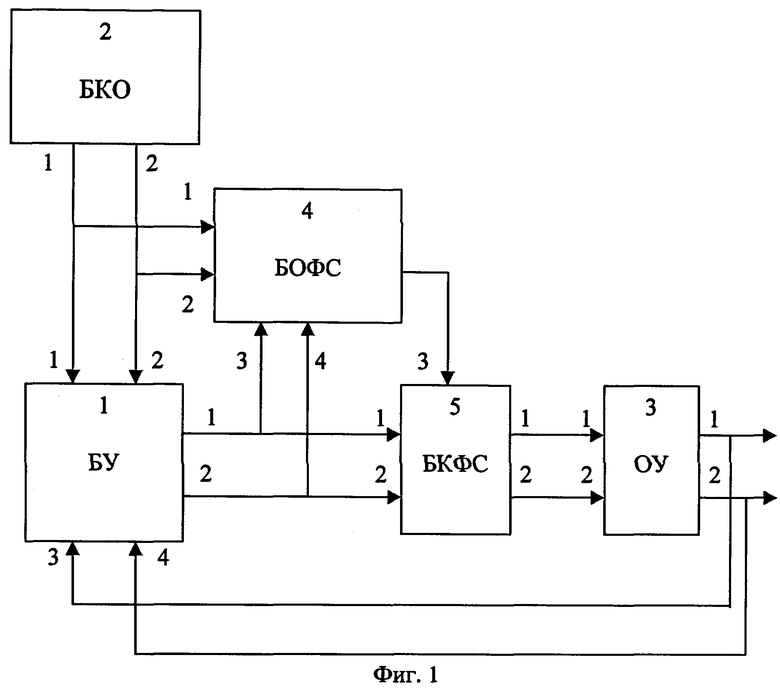
Предлагаемое техническое решение поясняется чертежами, где фиг.1 изображает функциональную схему системы управления, фиг.2 - первый вариант реализации блока определения фазовой связи, фиг.3 - второй вариант реализации блока определения фазовой связи.
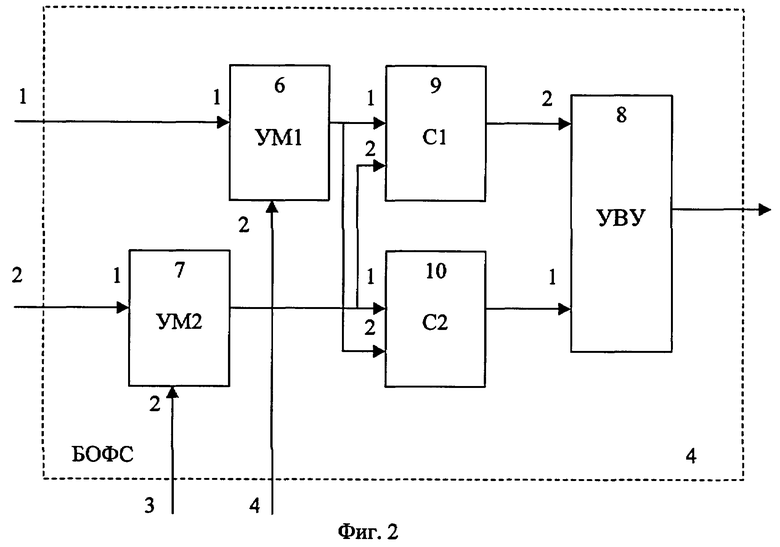
Функциональную схему системы управления поясняет фиг.1, на которой обозначено: 1 - блок управления; 2 - блок компенсации ошибки; 3 объект управления; 4 - блок определения фазовой связи; 5 - блок компенсации фазовой связи.
Первый вариант реализации блока определения фазовой связи поясняет фиг.2, на которой обозначено: 6, 7 - первое и второе устройства умножения; 8 - устройство вычисления угла; 9, 10 - первый и второй сумматоры.
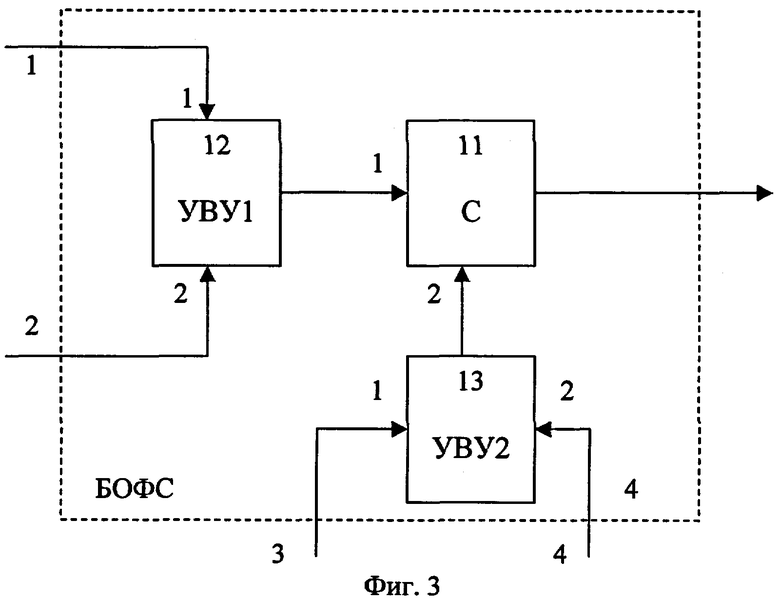
Второй вариант реализации блока определения фазовой связи поясняет фиг.3, на которой обозначено: 11 - сумматор; 12, 13 - первое и второе устройства вычисления угла.
Блок управления 1 представляет собой по каждому каналу последовательно соединенные координатор (см. [1] стр.411... 414, рис.8.1), усилитель с регулируемым коэффициентом (см. [4] стр.57... 62, рис.2.5), пропорциональным дальности до объекта управления 3, корректирующий фильтр, реализованный на базе ОУ 153УД6 (см. [1] стр.366... 371, рис.7.15), и сумматор аналоговых сигналов (см. [4] стр.75... 77, рис.3.1), на второй вход которого поступает соответствующий сигнал с выхода блока компенсации ошибки 2.
Блок компенсации ошибки 2 обеспечивает формирование команд компенсации динамической ошибки (см. [1] стр.379... 395).
Объект управления 3, включающий гироскоп, рулевые привода, планер, кинематические соотношения и приемопередающую аппаратуру, выполнен по известной схеме ([1] стр.372... 379).
Блок компенсации фазовой связи 5 обеспечивает на базе аналоговых умножителей (см. [4] стр.91... 100, рис.3.15), сумматоров аналоговых сигналов (см. [4] стр.75... 77, рис.3.1) и аналоговых тригонометрических преобразователей (см. [5] стр.33... 38, рис.2.1-2.3) реализацию функции фазового вращения [2]:

где Uвх1, Uвх2 - сигналы с первого и второго входа устройства 5;
 - сигнал с третьего входа устройства 5, пропущенный через аналоговый интегратор, реализованный на базе ОУ 153УД6 (см. [4] стр.77... 82, рис.3.3); Uвых1, Uвых2 – сигналы на первом и втором выходе устройства 5.
- сигнал с третьего входа устройства 5, пропущенный через аналоговый интегратор, реализованный на базе ОУ 153УД6 (см. [4] стр.77... 82, рис.3.3); Uвых1, Uвых2 – сигналы на первом и втором выходе устройства 5.
Устройства умножения 6, 7 представляют собой аналоговые умножители, реализованные на базе ОУ 153УД6 (см. [4] стр.91... 100, рис.3.15).
Устройства вычисления угла 8, 12, 13 обеспечивают реализацию на базе аналогового делителя (см. [4] стр.100... 101, рис.3.22) и блок вычисления арктангенса (см. [5] стр.33... 38, рис.2.1-2.3), реализованный на базе ОУ 153УД6, следующей функции:

где Uвх1, Uвх2, Uвых - сигналы на первом и втором входах и выходе устройств 8, 12, 13.
Устройство 9 представляет собой сумматор аналоговых сигналов (см. [4] стр.75... 77, рис.3.1), реализованный на базе ОУ 153УД6.
Устройства 10, 11 представляют собой сумматор аналоговых сигналов с двумя входами (инвертирующим и неинвертирующим), реализованный на базе ОУ 153УД6 (см. [4] стр.75... 77, рис.3.2).
Вновь вводимые блоки реализуются на базе элементов, являющихся стандартными и выпускаемыми промышленностью со стандартной точностью.
Рассмотрим работу системы управления. Система управления работает следующим образом (см. фиг.1).
Сигналы с первого и второго выходов объекта управления 3, пропорциональные положению объекта управления 3 в пространстве, поступают на третий и четвертый входы блока управления 1. С первого и второго выхода блока компенсации ошибки 2 поступают сигналы компенсации динамической ошибки соответственно на первый и второй вход блока управления 1, сигналы с выхода которого поступают соответственно на первый и второй входы блока компенсации фазовой связи 5, и на первый и второй вход блока определения фазовой связи 4, на третий и четвертый входы которого поступают сигналы с первого и второго выходов блока управления 1. Сигнал с выхода блока определения фазовой связи 4, пропорциональный величине фазовой связи каналов подается на третий вход блока компенсации фазовой связи 5. Сигналы с первого и второго выходов фазового вращателя 5 подаются на первый и второй вход объекта управления 3. Гироскоп раскладывает входные сигналы объекта управления 3 и подает их на рулевые привода. Изменение положения рулей приводов приводят к изменению в пространстве положения планера и через кинематические соотношения координат объекта управления 3 на его первом и втором выходах.
Первый вариант блока определения фазовой связи 4 работает так (см. фиг.2).
С первого и второго выходов блока компенсации ошибки 2 поступают сигналы компенсации ошибки соответственно на первые входы первого и второго устройств умножения 6 и 7, на вторые входы которых поступают команды управления соответственно с первого и второго выходов блока управления 1. Сигнал с выхода первого устройства умножения 6 через первый сумматор 9, на второй вход которого поступает сигнал с выхода второго устройства умножения 7, поступает на второй вход устройства вычисления угла 8. Сигнал с выхода второго устройства умножения 7 через второй сумматор 10, на второй вход которого поступает сигнал с выхода первого устройства умножения 6, поступает на первый вход устройства вычисления угла 8. На выходе устройства вычисления угла 8 формируется сигнал, пропорциональный величине угла разворота между вектором команд компенсации ошибки и вектором команд управления объектом 3. Этот сигнал поступает на третий вход блока компенсации фазовой связи 5.
Второй вариант блока определения фазовой связи 4 работает так (см. фиг.3).
С первого и второго выходов блока компенсации ошибки 2 поступают сигналы компенсации ошибки соответственно на первые и второй входы первого устройства вычисления угла 12, с выхода которого поступает сигнал, пропорциональный углу разворота вектора команд компенсации ошибки, на первый вход сумматора 11. С первого и второго выходов блока управления 2 ошибки 2 поступают сигналы управления соответственно на первые и второй входы второго устройства вычисления угла 13, с выхода которого поступает сигнал, пропорциональный углу разворота вектора команд управления, на второй вход сумматора 11. На выходе сумматора 11 формируется сигнал, пропорциональный величине угла разворота между вектором команд компенсации ошибки и вектором команд управления объектом 3. Этот сигнал поступает на третий вход блока компенсации фазовой связи 5.
В системе управления с первым вариантом реализации блока определения фазовой связи 4 повышение точности достигается путем:
- определения величины угла разворота между вектором команд компенсации ошибки и вектором команд управления объектом 3, т.е. величины фазовой связи каналов объекта 3, на выходе устройства 4 с помощью элементов 6-10;
- компенсации фазовой связи каналов объекта 3 с помощью устройства 5;
- определенной последовательности соединения вновь вводимых элементов 4, 5, 8, 10 и выполнения определенных параметрических соотношений.
В системе управления со вторым вариантом реализации блока определения фазовой связи 4 повышение точности достигается путем:
- определения угла разворота вектора команд компенсации ошибки с помощью элемента 12;
- определения угла разворота вектора команд управления с помощью элемента 13;
- определения величины угла разворота между вектором команд компенсации ошибки и вектором команд управления объектом 3, т.е. величины фазовой связи каналов объекта 3, на выходе устройства 4 с помощью элементов 11-13;
- компенсации фазовой связи каналов объекта 3 с помощью устройства 5;
- определенной последовательности соединения вновь вводимых элементов 4, 5, 12, 13 и выполнения определенных параметрических соотношений.
Обосновать работу системы управления с первым вариантом блока определения фазовой связи 4 можно следующим образом.
Осуществляется начало управления объектом 3. Из-за наличия фазовой связи каналов объекта 3 наблюдается перетекание команд управления из одного канала в другой, что приводит к увеличению колебаний объекта 3 под действием возмущений и смещению объекта 3 относительно его траектории движения. Определяется величина фазовой связи каналов объекта 3 в следующей последовательности.
1. На выходе первого сумматора 9 формируется сигнал

2. На выходе второго сумматора 10 формируется сигнал

3. На выходе устройства 8 вычисляется угол разворота между вектором команд компенсации ошибки и вектором команд управления объектом 3, т.е. величина фазовой связи каналов объекта 3:

Сигнал (5), пропорциональный углу разворота между вектором команд компенсации ошибки и вектором команд управления объектом 3, подается на третий вход устройства 5, т.е. на вход интегратора, сигнал с выхода которого обеспечивает разворот вектора команд в соответствии со следующей зависимостью

где 
Фазовый вращатель (6) осуществляет разворот вектора команд на угол (5) и тем самым компенсирует фазовую связь каналов. После разворота вектора команд на угол (5) на выходе устройства 4 будет формироваться сигнал, близкий к нулю, т.е. на третьем входе интегратора устройства 5, а на выходе этого интегратора устройства 5 будет сохраняться сигнал, пропорциональный величине угла разворота между вектором команд компенсации ошибки и вектором команд управления объектом 3. После этого объект 3 будет двигаться по своей траектории без колебаний и смещения, вызванных наличием в объекте 3 фазовой связи каналов.
Обосновать работу системы управления со вторым вариантом блока определения фазовой связи 4 можно следующим образом.
Осуществляется начало управления объектом 3. Из-за наличия фазовой связи каналов объекта 3 наблюдается перетекание команд управления из одного канала в другой, что приводит к увеличению колебаний объекта 3 под действием возмущений и смещению объекта 3 относительно его траектории движения.
Определяется величина фазовой связи каналов объекта 3 в следующей последовательности.
1. На выходе первого устройства вычисления угла 12 формируется сигнал, пропорциональный углу разворота вектора команд компенсации ошибки:

где Uвых12 - фазовый спектр вектора команд компенсации ошибки К (см. [6] стр.512): fk=Мк · exp-iUвых12.
2. На выходе первого устройства вычисления угла 12 формируется сигнал, пропорциональный углу разворота вектора команд управления:

где Uвых13 - фазовый спектр вектора команд управления U (см. [6] стр.512): FU=MU·exp-iUвых13.
5. На выходе устройства 11 вычисляется величина фазовой связи каналов объекта 3:

Сигнал (9), пропорциональный углу разворота между вектором команд компенсации ошибки и вектором команд управления объектом 3, подается на третий вход устройства 5, т.е. на вход интегратора, сигнал с выхода которого обеспечивает разворот вектора команд в соответствии со следующей зависимостью

где 
Фазовый вращатель (10) осуществляет разворот вектора команд на угол (9) и тем самым компенсирует фазовую связь каналов. После разворота вектора команд на угол (9) на выходе устройства 4 будет формироваться сигнал, близкий к нулю, т.е. на третьем входе интегратора устройства 5, а на выходе этого интегратора устройства 5 будет сохраняться сигнал, пропорциональный величине угла разворота между вектором команд компенсации ошибки и вектором команд управления объектом 3. После этого объект 3 будет двигаться по своей траектории без колебаний и смещения, вызванных наличием в объекте 3 фазовой связи каналов.
Приведенный анализ показывает, что обеспечивается повышение точности работы системы управления при фазовой связи каналов объекта в условиях воздействия возмущающих факторов, помех и маневрах объекта слежения.
Следовательно, использование новых элементов 4-5, 8, 10, 12, 13, соединенных в соответствии с фиг.1, 2 и 3 с указанными характеристиками (1)-(10), в предлагаемой системе управления выгодно отличают предлагаемые технические решения от прототипа, так как обеспечивают повышение точности работы системы управления при фазовой связи каналов объекта в условиях воздействия помех и маневрах объекта слежения.
Источники информации
1. Лебедев А.А., Карабанов В.А. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965, с.28-30, рис.1.7.
2. Дудка В.Д., Парфенов Ю.Л. Двухканальный автопилот со стабилизацией фазового сдвига рулевых приводов на частоте вращения ракеты //В кн.: Проблемы проектирования и производства систем и комплексов. - Тула: ТГУ, 1999, с.360-362 (прототип).
3. Морозов В.И., Чуканов М.Н., Ухабова О.Н. Нелинейная коррекция двумерной системы управления со знакопеременной фазовой связью //В кн.: Проблемы проектирования и производства систем и комплексов. - Тула: ТГУ, 2000, с.271-274 (прототип).
4. Алексенко А.Г., Коломбет Е.А., Стародуб Г.И. Применение прецизионных аналоговых ИС. - М.: Радио и связь, 1981.
5. Горбацевич Е.Д., Левинзон Ф.Ф. Аналоговое моделирование систем управления. - М.: Наука, 1984.
6. Энциклопедия кибернетики. Гл. ред. Украинской советской энциклопедии. - Киев, 1974. Том 2.
Изобретение относится к системам автоматического управления и может быть использовано в образцах техники, имеющих фазовую связь каналов объекта управления, а также в установках для их научного исследования. Техническим результатом является повышение точности работы системы управления при фазовой связи каналов объекта и наличии больших команд компенсации динамической ошибки одновременно в обоих каналах управления. Поставленная задача решается за счет того, что в способе по измеренным командам компенсации динамической ошибки и командам управления объектом определяют угол разворота между командами компенсации динамической ошибки и командами управления объектом. Устройство, реализующее этот способ, по первому варианту содержит устройства умножения, сумматоры, устройство вычисления угла. Устройство по второму варианту содержит устройство суммирования, устройства вычисления угла. В другом способе определяют фазовый сдвиг между командами компенсации динамической ошибки и командами управления объектом и компенсируют фазовый сдвиг в командах управления объектом. Система, реализующая этот способ, содержит блок компенсации ошибки, блок управления, блок определения фазовой связи, блок компенсации фазовой связи. 5 с.п. ф-лы, 3 ил.
| МОРОЗОВ В.И | |||
| Проблемы проектирования производства систем и комплексов | |||
| - Тула: ТГУ, 2000, с.271-274 | |||
| RU 94002916 А1, 27.04.1996 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СООТНОШЕНИЯ ДВУХ ФАЗ СИНУСОИДАЛЬНЫХ СИГНАЛОВ | 1992 |
|
RU2024029C1 |
| US 6381291 А, 30.04.2002 | |||
| US 4851835 А, 25.07.1989. | |||
