Изобретение относится к системам автоматического управления летательными аппаратами и динамическими объектами и может быть использовано в образцах техники, работающих в условиях воздействия помех и пропадания информационных сигналов, а также в установках для научных исследований.
Известен способ управления движущимся объектом [Лебедев А.А., Карабанов В.А. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965. С.28-30, рис.1.7], заключающийся в том, что выделяют координаты объекта, определяют величину ошибки, пропорциональную разности между входной координатой и координатой объекта, формируют команды управления объектом в соответствии с величиной ошибки.
Система управления для осуществления указанного способа содержит последовательно соединенные приемные устройства входного сигнала и выходного сигнала, устройство выработки команд управления, устройство телеуправления, систему управления нормальными перегрузками.
Недостатком указанных технических решений является низкая точность работы системы управления в условиях воздействия помех и отработки управляющих воздействий.
Известен способ управления динамическим объектом [Красовский А.А., Поспелов Г.С. Основы автоматики и технической кибернетики, Москва-Ленинград, Государственное энергетическое издательство, 1962, стр.330-333], выбранный в качестве прототипа для первого варианта способа, заключающийся в формировании ошибки управления объектом, представляющей собой разностный сигнал между сигналом задания и сигналом обратной связи, фильтрации сигнала ошибки управления и формировании в соответствии с отфильтрованным сигналом команд управления объектом, организации цепи внутренней обратной связи, охватывающей динамические звенья, предназначенные для формирования управляющего сигнала, и выборе передаточной функции корректирующего звена в цепи упомянутой внутренней обратной связи в соответствии с передаточной функцией фильтра в прямой цепи. Это обеспечивает компенсацию фазового запаздывания при фильтрации сигнала ошибки.
Система управления для осуществления указанного способа, выбранная в качестве прототипа [Красовский А.А., Поспелов Г.С. Основы автоматики и технической кибернетики, Москва-Ленинград, Государственное энергетическое издательство, 1962, стр.330-333] для первого и третьего варианта системы, содержит устройство выделения ошибки, последовательно включенные в цепи прямой связи динамические блоки, осуществляющие обработку сигналов и формирование управляющих сигналов, а также блок формирования сигнала компенсации фазового запаздывания, включенный в цепь внутренней обратной связи, охватывающей упомянутые динамические звенья.
Недостатком указанных технических решений является низкая точность работы системы управления в условиях воздействия помех и отработки управляющих воздействий из-за несоответствия переходных процессов в фильтре, установленном в цепи управления, и в корректирующем звене, реализующем такой же фильтр. Кроме того, при воздействии помех возможно пропадание сигнала ошибки. При этом происходит размыкание внешнего (основного) контура системы управления. В этом случае формирование команд объектом будет осуществляться в соответствии с внутренним контуром. Однако передаточная функция внутреннего контура не соответствует передаточной функции замкнутого контура системы управления, так как в цепи внутренней обратной связи реализуется передаточная функция фильтра. В связи с этим динамика формирования команд управления будет не соответствовать динамике формирования команд управления внешним (основным) контуром системы управления объектом, что также ухудшит точность работы системы управления.
Известен способ управления движущимся объектом [Козлов В.И. Системы автоматического управления летательными аппаратами. - М.: Машиностроение, 1979 стр.190-193], заключающийся в том, что выделяют сигнал ошибки управления, проводят обработку сигнала ошибки управления и формирование в соответствии с этим сигналом ошибки команд управления объектом, пропорциональных комбинации ошибки, производной и интегралу от ошибки.
Система управления для осуществления указанного способа содержит устройство выделения ошибки и блок управления, представляющий собой параллельно включенный усилитель, дифференцирующее устройство и интегратор, а также в каждом канале фильтры низких частот, обеспечивающие подавление высокочастотных помех.
Такая реализация блока управления обеспечивает регулирование по отклонению, производной и интегралу. Сформированные команды управления поступают в канал телеуправления для передачи на борт объекта управления. Однако в связи с тем, что контур наведения содержит двойное интегрирующее звено (кинематическое звено), введение дополнительного астатизма приводит к потере устойчивости и необходимости введения дополнительных корректирующих звеньев. Кроме того, введения фильтров низких частот также может значительно снижать запасы устойчивости системы управления.
Наиболее близким к заявленному второму варианту способу является способ управления динамическим объектом [АС 377724 от 21.10.1970, МПК G05B 5/00, 11/00 (прототип)], заключающийся в том, что выделяют сигнал ошибки управления и формируют команды управления объектом, содержащие составляющую, пропорциональную интегралу сигнала ошибки управления.
Система управления для осуществления указанного способа и выбранная в качестве прототипа для второго варианта системы содержит последовательно соединенные устройство выделения ошибки, блок повышения астатизма, выполненный в виде параллельно соединенных интегратора и логического устройства, и сумматора, второй вход которого соединен с устройством выделения ошибки через пропорциональное звено, а выход сумматора подключен к входу объекта.
В предложенном решении обеспечивается повышение быстродействия системы управления только в установившемся режиме, так как логическое устройство устанавливает на выходе интегратора величину, соответствующую установившемуся значению объекта регулирования. Кроме того, наличие интегратора в прямой цепи управления снижает запасы устойчивости системы регулирования, а в системах регулирования с астатизмом может приводить к потере устойчивости.
Устройство обработки сигналов [Горбацевич Е.Д., Левинзон Ф.Ф., Аналоговое моделирование систем управления. М.: Наука, 1984 стр.110-112, рис.4.11], выбранное за прототип, включающее последовательно соединенные сумматор, усилитель, интегратор, выход которого соединен со вторым входом сумматора, обеспечивает подавление высокочастотных помех.
Недостатком известного устройства обработки сигналов является большое фазовое запаздывание, вносимое устройством в сигнал ошибки управления. При введении в контур системы управления такого устройства, с полосой пропускания, равной полосе пропускания системы, теряется устойчивость системы. Это приводит к необходимости расширения полосы пропускания устройства, а следовательно, к снижению глубины подавления высокочастотных помех устройством.
Блок повышения астатизма [Козлов В.И. Системы автоматического управления летательными аппаратами. - М.: Машиностроение, 1979 стр.190-193], выбранный за прототип, включающий последовательно соединенные линейное звено с насыщением и интегратор, обеспечивает ограничение максимального значения выходного сигнала интегратора.
Недостатком известного блока повышения астатизма является то, что включение его в контур системы управления приводит к уменьшению и даже потере устойчивости. Это связано с тем что, контур системы управления летательным аппаратом, как правило, уже содержит двойное интегрирующее звено (кинематическое звено).
Общим недостатком указанных технических решений является низкая точность работы системы в условиях помех и отработки управляющих воздействий.
Задачей изобретения является повышение помехоустойчивости и повышение устойчивости и точности отработки управляющих воздействий в условиях помех измерения.
Решение поставленной задачи достигается тем, что в способе управления объектом, включающем выделение сигнала ошибки управления, фильтрацию сигнала и в соответствии с отфильтрованным сигналом формирование команд управления объектом, а также организацию цепи внутренней обратной связи по командам управления объектом, обеспечивающую формирование сигнала компенсации фазового запаздывания, осуществляют вычисление разностного сигнала между сигналом ошибки управления и отфильтрованным сигналом, проводят фильтрацию полученной разности с использованием сигнала компенсации фазового запаздывания, при этом образовавшаяся с помощью цепи внутренней обратной связи передаточная функция замкнутого контура соответствует передаточной функции системы управления объектом.
Решение поставленной задачи достигается тем, что в способе управления объектом, включающем выделение сигнала ошибки управления и формирование команд управления объектом, содержащих составляющую пропорциональную интегралу сигнала ошибки управления, устанавливают диапазон значений сигнала ошибки, осуществляют сравнение сигнала ошибки с установленным диапазоном, если сигнал ошибки попадает в установленный диапазон, то составляющую команды управления объектом, пропорциональную интегралу ошибки приравнивают нулю, если сигнал ошибки не попадает в установленный диапазон, то формируют составляющую команды управления объектом, пропорциональную интегралу ошибки управления.
Для осуществления первого способа в систему управления, включающую устройство выделения ошибки, устройство обработки сигналов, последовательно соединенные блок управления и блок формирования сигнала компенсации фазового запаздывания, устройство обработки сигналов выполнено с возможностью компенсации фазового запаздывания, второй вход которого соединен с выходом устройства выделения ошибки, а выход соединен со входом блока управления, при этом выход блока формирования сигнала компенсации фазового запаздывания соединен с первым входом устройства обработки сигналов, а для блока формирования сигнала компенсации фазового запаздывания и устройства обработки сигналов реализуется следующее соотношение:
WMO=WОУ,
где WMO=WБФСКФЗWУОС1 - передаточная функция модели объекта управления;
WОУ - передаточная функция объекта управления;
WБФСКФЗ - передаточная функция блока формирования сигнала компенсации фазового запаздывания;
WУОС1 - передаточная функция устройства обработки сигналов от его первого входа до выхода.
Для осуществления второго способа в систему управления, включающую последовательно соединенные устройство выделения ошибки и блок управления, введен блок повышения астатизма, вход которого соединен с выходом устройство выделения ошибки, а выход блока повышения астатизма соединен со вторым входом блока управления, при этом блок повышения астатизма реализует следующую зависимость:
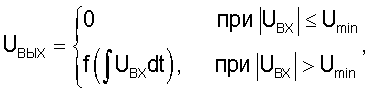
где f(...) - функциональная зависимость.
Для осуществления обоих указанных способов в систему управления, включающую устройство выделения ошибки, устройство обработки сигналов и последовательно соединенные блок управления и блок формирования сигнала компенсации фазового запаздывания, введены блок повышения астатизма, вход которого соединен с первым входом блока управления, а выход соединен со вторым входом блока управления, а выход блока формирования сигнала компенсации фазового запаздывания соединен с первым входом устройства обработки сигналов, при этом устройство обработки сигналов выполнено с возможностью компенсации фазового запаздывания, выход которого соединен с первым входом блока управления, а второй вход устройства обработки сигналов соединен с выходом устройства выделения ошибки, при этом блок повышения астатизма реализует следующую зависимость:

где f(...) - функциональная зависимость,
а блок формирования сигнала компенсации фазового запаздывания и блок обработки сигналов реализуют следующее соотношение:
WМО=WОУ,
где WMO=WБФСКЗWУОС1 - передаточная функция модели объекта управления;
WОУ - передаточная функция объекта управления;
WБФСКЗ - передаточная функция блока формирования сигнала компенсации фазового запаздывания;
WУОС1 - передаточная функция устройства обработки сигналов от его первого входа до выхода.
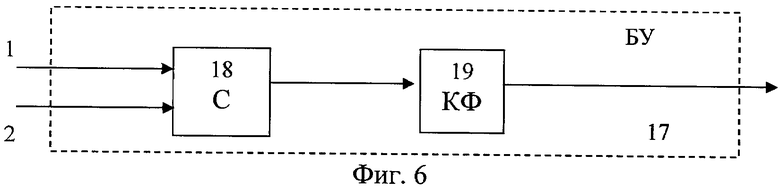
В системе управления, реализующей второй способ, а также в системе управления реализующей оба способа первый вариант блока управления содержит последовательно соединенные сумматор и корректирующий фильтр, причем первый и второй входы сумматора являются соответственно первым и вторым входами блока управления, а выход корректирующего фильтра является выходом блока управления.
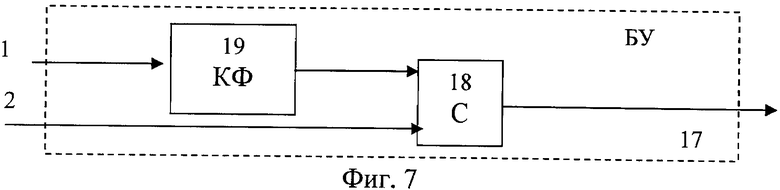
В системе управления, реализующей второй способ, а также в системе управления, реализующей оба способа, второй вариант блока управления содержит последовательно соединенные корректирующий фильтр и сумматор, причем вход корректирующего фильтра является первым входом блока управления, второй вход сумматора является вторым входом блока управления, а выход сумматора является выходом блока управления.
Для осуществления указанных способов в устройство обработки сигналов, включающее последовательно соединенные первый сумматор, первый усилитель, первый интегратор введены третий усилитель, вход которого соединен с выходом первого сумматора, и последовательно соединенные второй усилитель, вход которого соединен с выходом первого сумматора, второй сумматор, второй вход которого соединен с выходом первого интегратора, второй интегратор, третий сумматор, второй вход которого соединен с выходом третьего усилителя, третий интегратор, выход которого соединен со вторым входом первого сумматора, причем первый вход первого сумматора является первым входом устройства обработки сигналов, третий вход второго сумматора является вторым входом устройства обработки сигналов, а выход третьего интегратора является выходом устройства обработки сигналов.
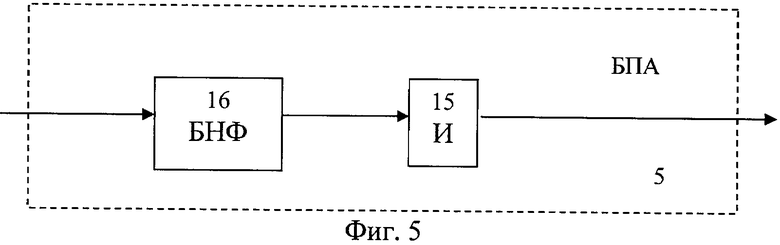
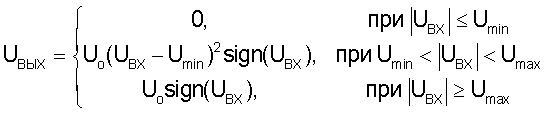
Для осуществления указанных способов в блок повышения астатизма, включающий интегратор, введен блок нелинейной функции, выход которого соединен со входом интегратора, причем вход блока нелинейной функции является входом блока повышения астатизма, а выход интегратора является выходом блока повышения астатизма, при этом блок нелинейной функции реализует следующую зависимость:

где Uо - опорный сигнал.
В заявляемых технических решениях предлагается для повышения помехоустойчивости осуществлять обработку высокочастотных помех в сигналах ошибок управления с учетом команд управления, а для повышения устойчивости и точности при отработке управляющих воздействий осуществлять изменение составляющей команды управления объектом, пропорциональной интегралу ошибки в зависимости от величины сигнала ошибки управления.
Предлагаемое техническое решение поясняется фигурами 1, 2, 3, 4, 5, 6 и 7, где Фиг.1 изображает реализацию системы управления по первому способу управления. Фиг.2 изображает реализацию системы управления по второму способу, Фиг.3 изображает реализацию системы управления по первому и второму способам. Фиг.4 изображает реализацию устройства обработки сигналов, Фиг.5 изображает реализацию блока повышения астатизма, Фиг.6, 7 изображают реализацию блока управления.
Реализация системы управления по первому способу поясняет Фиг.1, на которой обозначено: 1 - устройство выделения ошибки; 2 - устройство обработки сигналов; 3 - блок управления; 4 - блок формирования сигнала компенсации фазового запаздывания.
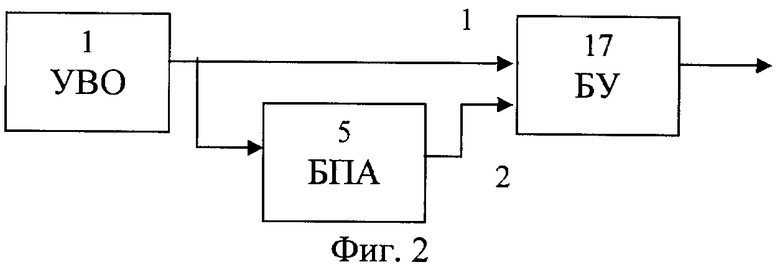
Реализация системы управления по второму способу поясняет Фиг.2, на которой обозначено: 1 - устройство выделения ошибки; 3 - блок управления; 5 - блок повышения астатизма.
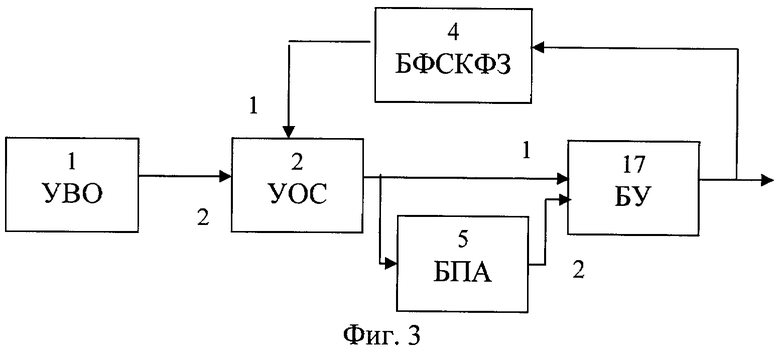
Реализация системы управления по первому и второму способам поясняет Фиг.3, на которой обозначено: 1 - устройство выделения ошибки; 2 - устройство обработки сигналов; 17 - блок управления; 4 - блок формирования сигнала компенсации фазового запаздывания; 5 - блок повышения астатизма.
Реализацию устройства обработки сигналов поясняет Фиг.4, на которой обозначено: 6, 7, 8 - первый, второй и третий сумматоры; 9, 10, 11 - первый, второй и третий усилители; 12, 13, 14 - первый, второй и третий интеграторы.
Реализацию блока повышения астатизма поясняет Фиг.5, на которой обозначено: 15 - интегратор; 16 - блок нелинейной функции.
Реализацию блока управления 17 поясняет Фиг.6, на которой обозначено: 18 - сумматор; 19 - корректирующий фильтр.
Реализацию блока управления 17 поясняет Фиг.7, на которой обозначено: 18 - сумматор; 19 - корректирующий фильтр.
Устройство выделения ошибки 1 включает пеленгационное устройство, блок управления, исполнительный привод, датчик угла поворота, антенную установку и является узкопольным пеленгатором, предназначенным для определения координат объекта управления, и выполнено по известной схеме (см.[3] стр.63...70,рис.2.7...2.9).
Блок 3 и 19 представляют собой корректирующий фильтр (см. [1] стр.366...371, рис.7.15).
Устройства 4, 9, 10 и 11 представляют собой усилитель с регулируемым коэффициентом передачи (см. [4], стр.57...59, рис.2.3).
Устройство 6 представляет собой сумматор аналоговых сигналов с двумя входами (инвертирующим и неинвертирующим) (см. [4] стр.75...77, рис.3.2).
Устройство 7 представляет собой сумматор аналоговых сигналов с тремя входами (одним инвертирующим и двумя неинвертирующими) (см. [4] стр.75...77, рис.3.2).
Устройство 8, 18 представляют собой сумматор аналоговых сигналов с двумя входами (см. [4] стр.75...77, рис.3.1).
Интеграторы 12, 13, 14 и 15 представляют собой аналоговый интегратор (см.[4], стр.77...79, табл.3.1).
Устройство 16 обеспечивает реализацию нелинейной функции (см.[2], стр.33...54):

где UВХ(ВЫХ)ij - сигнал с i-го выхода (входа) j-го блока.
Вновь вводимые блоки реализуются на базе элементов, являющихся стандартными и выпускаемыми промышленностью со стандартной точностью.
Система управления, реализующая первый способ, работает следующим образом.
На выходе устройства 1 формируется сигнал, пропорциональный величине ошибки управления ε(t). С выхода устройства 1 сигнал поступает на второй вход устройства обработки сигналов 2. Сигнал с выхода устройства обработки сигналов 2 поступает на вход блока управления 3. Сформированный в блоке 3 командный сигнал u(t) поступает через блок компенсации фазового запаздывания 4 на первый вход устройства обработки сигналов 2, обеспечивая компенсацию фазового запаздывания сигнала ошибки управления.
Устройство обработки сигналов 2 работает следующим образом. Сигнал, пропорциональный величине ошибки управления ε(t), проходит через последовательно соединенные устройства 6, 9, 12, 7, 13, 8 и 14, сигнал с выхода которого поступает на второй вход сумматора 6. Сигнал с выхода сумматора 6 поступает через усилитель 10 на первый вход сумматора 1 и через усилитель 11 на второй вход сумматора 8. На выходе устройства 2 обеспечивается формирование как отфильтрованного сигнала ошибки управления ε(t), так и его прогноза в случае пропадания входного сигнала путем обнуления коэффициентов усилителей 9, 10 и 11.
В первом варианте реализации системы управления повышение помехоустойчивости достигается путем:
- формирования на выходе блока 4 сигнала, пропорционального выходным координатам;
- формирования на выходе устройства 2 как отфильтрованного сигнала ошибки управления ε(t), так и его прогноза в случае пропадания входного сигнала;
- подачей сигнала с выхода устройства 4 на первый вход устройства обработки сигналов 2;
- определенной последовательностью соединения вновь вводимых элементов 2 и 4 и выполнением определенных параметрических соотношений.
Обосновать работу первого варианта системы управления можно следующим образом.
Передаточная функция по командам управления u(t) в зависимости от сигналов ошибки управления ε(t) имеет вид:

где  - передаточная функция устройства обработки сигналов 2; WMO=W4W7W8W13W14 - передаточная функция модели объекта управления; Wi - передаточная функция i-го блока.
- передаточная функция устройства обработки сигналов 2; WMO=W4W7W8W13W14 - передаточная функция модели объекта управления; Wi - передаточная функция i-го блока.
Передаточная функция устройства обработки сигналов 2 обеспечивает в полосе пропускания минимальное фазовое запаздывание.
Передаточная функция системы управления имеет вид:

где WОБ - передаточная функция объекта управления.
При WМО=WОБ передаточная функция примет вид:
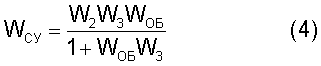
т.е. в системе управления обеспечивается дополнительное подавление помех с помощью устройства обработки сигналов 2 при сохранении динамических характеристик (запасов устойчивости и т.д.) системы, так как в характеристическое уравнение (знаменатель (4)) не входит W2. Это позволяет выбирать полосу пропускания устройства обработки сигналов 2, равную полосе пропускания системы управления, и обеспечивать эффективное подавление высокочастотных помех.
Анализ формул (2)...(4) показывает, что в рассматриваемой системе обеспечивается повышение помехоустойчивости системы управления.
Система управления, реализующая второй способ, работает следующим образом.
На выходе устройства 1 формируется сигнал, пропорциональный величине ошибки управления ε(t). С выхода устройства 1 сигнал поступает на первый вход блока управления 17 и на вход блока повышения астатизма 5, сигнал с выхода которого поступает на второй вход блока управления 17. С выхода блока 17 формируются команды управления u(t).
Блок повышения астатизма 5 работает следующим образом. Сигнал, пропорциональный величине ошибки управления ε(t), проходит через последовательно соединенные устройства 16 и 15. При этом обеспечивается изменение коэффициента передачи устройства 16 в цепи с интегратором 15.
Первый вариант блока управления 17 работает следующим образом. Сигнал, пропорциональный величине ошибки управления ε(t), проходит через последовательно соединенные устройства 18 и 19. На второй вход сумматора 18 подается сигнал с выхода интегратора 15.
Второй вариант блока управления 17 работает следующим образом. Сигнал, пропорциональный величине ошибки управления ε(t), проходит через последовательно соединенные устройства 19 и 18. На второй вход сумматора 18 подается сигнал с выхода интегратора 15.
Во втором варианте реализации системы управления повышение устойчивости к управляющим воздействиям достигается путем:
- формирования на выходе блока 5 сигнала, имеющего составляющие, пропорциональные как величине ошибки управления ε(t), так и пропорциональные интегралу сигнала ошибки управления ε(t);
- подачей сигнала с выхода устройства 5 на второй вход блока управления 17;
- определенной последовательностью соединения вновь вводимых элементов 2 и 4 и выполнением определенных параметрических соотношений.
Обосновать работу второго варианта системы управления можно следующим образом.
Для первого варианта блока управления передаточная функция по командам управления u(t) в зависимости от сигнала ошибки управления ε(t) имеет вид:

где W5=1+W16W15.
Для второго варианта блока управления передаточная функция по командам управления u(t) в зависимости от сигнала ошибки управления ε(т) имеет вид:

В системе управления при отработке управляющих воздействий, если величина сигнала ошибки управления ε(t) больше чем Umin, то коэффициент передачи блока 16 будет пропорционален квадрату сигнала ошибки управления ε(t), а следовательно, в контуре системы управления подключается дополнительный астатизм - интегратор 15. Подключение дополнительного интегратора 15 в контуре системы управления позволяет повысить установившуюся точность системы при отработке управляющих воздействий. При малых сигналах ошибки управления ε(t), т.е. меньше чем Umin, дополнительного астатизма в системе нет, т.к. коэффициент блока 16 равен нулю. Исключение дополнительного астатизма при малых сигналах ошибки управления ε(t), т.е. при выполнении требуемой точности, обеспечивает повышение устойчивости и демпфирования системы. При сигнале ошибки больше чем Umax обеспечивается максимальный коэффициент передачи блока 16, и, следовательно, максимальная, но ограниченная величина выходного сигнала интегратора 15, при которой обеспечивается устойчивость системы и необходимая точность.
Анализ формул (5)...(6) показывает, что в рассматриваемой системе обеспечивается повышение устойчивости и точности системы управления к управляющим воздействиям.
Система управления, реализующая третий способ, работает следующим образом.
На выходе устройства 1 формируется сигнал, пропорциональный величине ошибки управления ε(t). С выхода устройства 1 сигнал поступает на второй вход устройства обработки сигналов 2. Сигнал с выхода устройства обработки сигналов поступает на первый вход блока управления 17 и на вход блока повышения астатизма, с выхода которого сигнал поступает на второй вход блока управления 17. Сформированный в блоке 17 командный сигнал u(t) поступает через блок компенсации фазового запаздывания 4 на первый вход устройства обработки сигналов 2, обеспечивая компенсацию сигнала ошибки управления.
Устройство обработки сигналов 2 работает следующим образом. Сигнал, пропорциональный величине ошибки управления ε(t), проходит через последовательно соединенные устройства 6, 9, 12, 7, 13, 8 и 14, сигнал с выхода которого поступает на второй вход сумматора 6. Сигнал с выхода сумматора 6 поступает через усилитель 10 на первый вход сумматора 1 и через усилитель 11 на второй вход сумматора 8. На выходе устройства 2 обеспечивается формирование как отфильтрованного сигнала ошибки управления ε(t), так и его прогноза в случае пропадания входного сигнала путем обнуления коэффициентов усилителей 9, 10 и 11.
Блок повышения астатизма 5 работает следующим образом. Сигнал, пропорциональный величине ошибки управления ε(t), проходит через последовательно соединенные устройства 16 и 15. При этом обеспечивается изменение коэффициента передачи устройства 16 в цепи с интегратором 15.
Первый вариант блока управления 17 работает следующим образом. Сигнал, пропорциональный величине ошибки управления ε(t), проходит через последовательно соединенные устройства 18 и 19. На второй вход сумматора 18 подается сигнал с выхода интегратора 15.
Второй вариант блока управления 17 работает следующим образом. Сигнал, пропорциональный величине ошибки управления ε(t), проходит через последовательно соединенные устройства 19 и 18. На второй вход сумматора 18 подается сигнал с выхода интегратора 15.
В третьем варианте реализации системы управления повышение помехоустойчивости и устойчивости к управляющим воздействиям достигается путем:
- формирования на выходе блока 4 сигнала, пропорционального выходным координатам;
- формирования на выходе устройства 2 как отфильтрованного сигнала ошибки управления ε(t), так и его прогноза в случае пропадания входного сигнала;
- подачей сигнала с выхода устройства 4 на первый вход устройства обработки сигналов 2;
- формирования на выходе блока 5 сигнала, имеющего составляющие, пропорциональные как величине ошибки управления ε(t), так и пропорциональные интегралу сигнала ошибки управления ε(t);
- подачей сигнала с выхода устройства 5 на второй вход блока управления 17;
- определенной последовательностью соединения вновь вводимых элементов 2, 4 и 5 и выполнением определенных параметрических соотношений.
Обосновать работу третьего варианта системы управления можно следующим образом.
Передаточная функция по командам управления u(t) в зависимости от сигнала ошибки управления ε(t) имеет вид:

где  - передаточная функция устройства обработки сигналов 2; WМО=W4W13W14 - передаточная функция модели объекта управления.
- передаточная функция устройства обработки сигналов 2; WМО=W4W13W14 - передаточная функция модели объекта управления.
Для первого варианта блока управления передаточная функция имеет вид:

Для второго варианта блока управления передаточная функция имеет вид:

Передаточная функция системы управления имеет вид:

где WОБ - передаточная функция объекта управления.
При WМО=WОБ передаточная функция примет вид:

т.е. в системе управления обеспечивается дополнительное подавление помех с помощью устройства обработки сигналов 2 при сохранении динамических характеристик (запасов устойчивости и т.д.) системы, так как в характеристическом уравнении (знаменатель (11)) не входит W2. Это позволяет выбирать полосу пропускания устройства обработки сигналов, равную полосе пропускания системы управления, и обеспечивать эффективное подавление высокочастотных помех.
Кроме того, в данном варианте реализации системы управления использование устройства обработки сигналов 2 обеспечивает обработки сигналов сигнала ошибки управления ε(t) и исключает ложное подключение дополнительного интегратора 5 при наличии шумов на входе устройства 1.
Если при отработке управляющих воздействий величина сигнала ошибки управления ε(t) больше чем Umin, коэффициент передачи блока 16 будет пропорционален квадрату сигнала ошибки управления ε(t), а следовательно, в контуре системы управления подключается дополнительный астатизм - интегратор 15. Подключение дополнительного интегратора 15 в контуре системы управления позволяет повысить динамическую точность системы при отработке управляющих воздействий. При малых сигналах ошибки управления ε(t), т.е. меньше чем Umin, дополнительного астатизма в системе нет, т.к. коэффициент блока 16 равен нулю. Исключение дополнительного астатизма при малых сигналах ошибки управления ε(t), т.е. при выполнении требуемой точности, обеспечивает повышение устойчивости и демпфирования системы. При сигнале ошибки больше чем Umax обеспечивается максимальный коэффициент передачи блока 16 и, следовательно, максимальная, но ограниченная величина выходного сигнала интегратора 15, при которой обеспечивается устойчивость системы и необходимая точность.
Анализ формул (7)...(11) показывает, что в рассматриваемой системе обеспечивается повышение помехоустойчивости и устойчивости к управляющим воздействиям системы управления.
Таким образом, предлагаемый способ управления объектом (варианты), система управления (варианты), устройство обработки сигналов и блок повышения астатизма для его реализации обеспечивают повышение помехоустойчивости системы управления и повышение устойчивости и точности системы управления при отработке управляющих воздействий за счет компенсации фазовой задержки устройства обработки сигналов сигнала ошибки управления и дополнительного астатизма с регулируемым коэффициентом (регулирование составляющей, пропорциональной интегралу сигнала ошибки управления).
Следовательно, использование новых элементов 2, 4, 5, 7, 8, 10, 11, 13, 14, 16, соединенных в последовательности в соответствии с фигурами 1...7, с указанными динамическими характеристиками, определенными соотношениями (1)...(11), в предлагаемой системе управления выгодно отличает предлагаемое техническое решение от прототипа, так как обеспечивает повышение помехоустойчивости системы управления и повышение устойчивости системы управления при отработке управляющих воздействий.
СПИСОК ЛИТЕРАТУРЫ
1. Лебедев А.А., Карабанов В.А. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965.
2. Горбацевич Е.Д., Левинзон Ф.Ф. Аналоговое моделирование систем управления. М.: Наука, 1984(прототип).
3. Белянский П.В., Сергеев Б.Б., Управление наземными антеннами и радиотелескопами. - М.: Сов радио, 1980.
4. Алексенко А.Г., Коломбет Е.А., Стародуб Г.И. Применение прецизионных аналоговых ИС. - М.: Радио и связь, 1981.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления объектом, система управления (варианты) и способ обработки сигналов (варианты) | 2016 |
|
RU2627964C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ АСТАТИЧЕСКОГО ОБЪЕКТА | 1996 |
|
RU2103714C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ОБЪЕКТА И СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ЛУЧА ПРИЕМНО-ПЕРЕДАЮЩЕГО АНТЕННОГО УСТРОЙСТВА СИСТЕМЫ СОПРОВОЖДЕНИЯ ОБЪЕКТА | 2011 |
|
RU2476904C1 |
| Корректирующее устройство | 1987 |
|
SU1478188A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФАЗОВОЙ СВЯЗИ КАНАЛОВ И БЛОК ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ), ДВУМЕРНЫЙ СПОСОБ УПРАВЛЕНИЯ И ДВУМЕРНАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2236080C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2010 |
|
RU2437052C1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПО УГЛУ ТАНГАЖА | 2010 |
|
RU2445671C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2011 |
|
RU2459226C1 |

Изобретение относится к системам автоматического управления и может быть использовано в образцах техники, работающих в условиях воздействия помех и пропадании информационных сигналов, а также в установках для научных исследований. Технический результат заключается в повышении помехоустойчивости, а также устойчивости и точности отработки управляющих воздействий в условиях помех измерения. В способе управления объектом, включающем выделение сигнала ошибки управления, фильтрацию сигнала ошибки управления и формирование в соответствии с этим сигналом ошибки команд управления объектом, осуществляют компенсацию фазового запаздывания сигнала ошибки управления путем учета команд управления объектом при фильтрации сигнала ошибки. В варианте способа управления объектом, включающем выделение сигнала ошибки управления и формирование команд управления объектом, содержащих составляющую, пропорциональную интегралу сигнала ошибки управления, осуществляют коррекцию составляющей команды управления объектом, пропорциональной интегралу ошибки, в зависимости от величины сигнала ошибки управления. 7 н. и 2 з.п. ф-лы, 7 ил.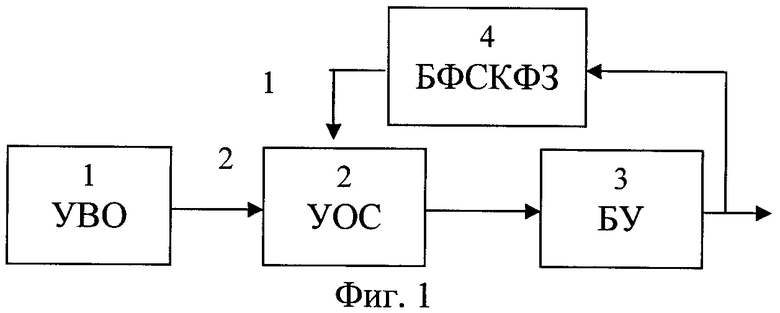
WMO=WОБ,
где WОБ - передаточная функция объекта управления.
где 
f(ε(t)) - зависимость от сигнала ошибки управления.
где 
f(ε(t)) - зависимость от сигнала ошибки управления, а от входа блока формирования сигнала компенсации фазового запаздывания до выхода устройства обработки сигналов реализуется передаточная функция модели объекта управления
WМО=WОБ,
где WОБ - передаточная функция объекта управления.
где Uo - опорный сигнал.
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СИСТЕМ, СОДЕРЖАЩИХ ИНТЕГРИРУЮЩЕЕ ЗВЕНО | 0 |
|
SU377724A1 |
| КОЗЛОВ В.И | |||
| Система автоматического управления летательными аппаратами | |||
| - М.: Машиностроение, 1979, с.190-193 | |||
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ ПО ЗАДАННЫМ ПОКАЗАТЕЛЯМ КАЧЕСТВА (ВАРИАНТЫ) | 2003 |
|
RU2261466C2 |
| US 3906196 А, 16.09.1975 | |||
| КРАСОВСКИЙ А.А | |||
| и др | |||
| Основы автоматики и технической кибернетики | |||
| - М.-Л | |||
| Государственное энергетическое издательство, 1962, с.330-333, рис.13-14,б | |||
| ГОРБАЦЕВИЧ | |||

