Область техники
Настоящее изобретение относится к устройству преобразования мощности для возбуждения электродвигателя, подходящему для управления электродвигателем переменного тока.
Предшествующий уровень техники
В последние годы электродвигатель переменного тока применяется в качестве источника мощности в областях техники производственных станков и бытовых приборов, а также в областях автомобильного транспорта, транспортных средствах с электродвигателем и т.п. Чтобы возбуждать электродвигатель переменного тока, требуется источник питания постоянного тока или источник питания переменного тока. В общем, устройство преобразования мощности для возбуждения электродвигателя, для которого источник питания постоянного тока используется как входной источник питания, имеет конфигурацию, в которой устройство преобразования мощности принимает входную мощность напряжения постоянного тока, поданного из источника питания постоянного тока, формирует напряжение переменного тока, имеющее произвольную частоту, с помощью схемы инвертора и возбуждает электродвигатель переменного тока. В общем, устройство преобразования мощности, для которого источник питания переменного тока используется как входной источник питания, имеет конфигурацию, в которой устройство преобразования мощности включает в себя схему преобразователя на входной стороне, один раз преобразует напряжение переменного тока, принимаемое посредством схемы преобразователя, в напряжение постоянного тока и подает это напряжение постоянного тока в схему инвертора, чтобы возбуждать электродвигатель переменного тока.
Конфигурация и т.п. устройства преобразования мощности для возбуждения электродвигателя поясняется в отношении устройства преобразования мощности для возбуждения электродвигателя, используемого для электрической железной дороги на переменном токе, в качестве примера. Напряжение в проводах как источник питания переменного тока является однофазным переменным напряжением в 20-25 кВ. Это однофазное напряжение переменного тока понижается приблизительно до 1-2 кВ посредством трансформатора и затем вводится в схему преобразователя устройства преобразования мощности для возбуждения электродвигателя. Схема преобразователя принимает входную мощность однофазного напряжения в 1-2 кВ переменного тока, преобразует однофазное напряжение переменного тока в напряжение постоянного тока приблизительно в 1500-3000 В и выводит напряжение постоянного тока в схему инвертора.
Известно, что напряжение постоянного тока в качестве выходного для схемы преобразователя включает в себя пульсацию частотной составляющей, в два раза превышающей частоту источника питания переменного тока (далее называемого "2f-составляющей источника питания"). Когда частота электродвигателя переменного тока располагается около этой 2f-составляющей источника питания, вероятно, что электрический ток электродвигателя переменного тока изменяется в сторону перегрузки по току, или большая пульсация возникает в крутящем моменте электродвигателя переменного тока, что препятствует безопасной работе.
Патентный документ 1 раскрывает, что такая 2f-составляющая источника питания, включенная в напряжение постоянного тока, извлекается, и ширина импульса широтно-импульсной модуляции схемы инвертора регулируется, чтобы подавлять влияние 2f-составляющей источника питания.
Патентный документ 1: Японская выложенная патентная заявка № S56-49693
Краткое изложение существа изобретения
Тем не менее, управление для подавления 2f-составляющей источника питания, раскрытое в патентном документе 1, не может применяться ко всем примерам вариантов применения. Например, чтобы максимизировать приложенное напряжение к электродвигателю переменного тока, трудно применять управление к транспортному средству с электродвигателем и т.п., которое выбирает и использует так называемый одноимпульсный режим как состояние переключения схемы инвертора.
Одноимпульсный режим является режимом для использования состояния переключения, в котором число импульсов, включенных в полупериод выходного линейного напряжения инвертора, равно одному. Тем не менее, в рабочей области в этом одноимпульсном режиме невозможно регулировать ширину импульса. Если технология патентного документа 1 применяется к транспортному средству с электродвигателем и т.п., которое выбирает и использует одноимпульсный режим, возникает проблема в том, что электродвигатель переменного тока формирует перегрузку по току, или возникает чрезмерно большая пульсация крутящего момента. Следовательно, трудно применять технологию патентного документа 1, основной аспект которой состоит в том, чтобы регулировать ширину импульса широтно-импульсной модуляции для схемы инвертора, к транспортному средству с электродвигателем и т.п., которое выбирает и использует одноимпульсный режим.
Задача настоящего изобретения заключается в том, чтобы предоставлять устройство преобразования мощности для возбуждения электродвигателя, которое обеспечивает управление подавлением для 2f-составляющей источника питания при одновременном подавлении формирования перегрузки по току или чрезмерно большой пульсации крутящего момента в электродвигателе переменного тока в примере варианта применения, в котором одноимпульсный режим выбирается и используется как состояние переключения схемы инвертора.
Чтобы разрешать вышеуказанные проблемы и достигать вышеуказанной задачи, устройство преобразования мощности для возбуждения электродвигателя согласно одному аспекту настоящего изобретения выполнено таким образом, что включает в себя: первый блок преобразования мощности, который подключен к источнику питания переменного тока и преобразует напряжение переменного тока от источника питания переменного тока в напряжение постоянного тока; второй блок преобразования мощности, который подключен к первому блоку преобразования мощности и преобразует напряжение постоянного тока в напряжение переменного тока, и выводит напряжение переменного тока в электродвигатель переменного тока; первый блок управления, который управляет первым блоком преобразования мощности; и второй блок управления, который управляет вторым блоком преобразования мощности, при этом второй блок управления включает в себя: блок формирования команд управления током, который формирует на основе, по меньшей мере, команды управления крутящим моментом команду управления током для электродвигателя переменного тока; блок вычисления индексов амплитуды напряжения, который вычисляет на основе команды управления током индекс амплитуды напряжения, который должен быть применен к электродвигателю переменного тока; блок регулирования команд управления током, который формирует на основе, по меньшей мере, индекса амплитуды напряжения и частоты электродвигателя переменного тока величину регулирования команд управления током для регулирования команды управления током; и блок формирования сигналов подавления пульсаций, который формирует на основе напряжения постоянного тока сигнал подавления пульсаций, и второй блок управления формирует на основе управляющего сигнала, включающего в себя команду управления током, регулируемую посредством величины регулирования команд управления током и сигнала подавления пульсаций, сигнал широтно-импульсной модуляции во второй блок преобразования мощности и выводит сигнал широтно-импульсной модуляции.
Дополнительно, устройство преобразования мощности для возбуждения электродвигателя согласно другому аспекту настоящего изобретения выполнено таким образом, что включает в себя: первый блок преобразования мощности, который подключен к источнику питания переменного тока и преобразует напряжение переменного тока из источника питания переменного тока в напряжение постоянного тока; второй блок преобразования мощности, который подключен к первому блоку преобразования мощности и преобразует напряжение постоянного тока в напряжение переменного тока и выводит напряжение переменного тока в электродвигатель переменного тока; первый блок управления, который управляет первым блоком преобразования мощности; и второй блок управления, который управляет вторым блоком преобразования мощности, при этом второй блок управления включает в себя: блок формирования команд управления током, который формирует на основе, по меньшей мере, команды управления крутящим моментом команду управления током для электродвигателя переменного тока; и блок вычисления индексов амплитуды напряжения, который вычисляет на основе команды управления током индекс амплитуды напряжения, который должен быть применен к электродвигателю переменного тока, и первый блок управления включает в себя: блок формирования команд управления напряжением постоянного тока, который формирует команду управления напряжением постоянного тока, которая является целевым значением напряжения постоянного тока; и блок управления напряжением постоянного тока, который выполняет управление для обеспечения совпадения постоянного напряжения и команды управления напряжением постоянного тока друг с другом, и когда частота электродвигателя переменного тока присутствует в предварительно определенном диапазоне и выходное напряжение второго блока преобразования мощности задается как предварительно определенное значение, меньшее максимального напряжения, которое может выводиться в соответствии с напряжением постоянного тока, блок формирования команды управления напряжением постоянного тока формирует и выводит команду управления напряжением постоянного тока для обеспечения совпадения выходного напряжения второго блока преобразования мощности с предварительно определенным значением.
С помощью устройства преобразования мощности для возбуждения электродвигателя согласно настоящему изобретению сигнал широтно-импульсной модуляции для второго блока преобразования мощности формируется согласно управляющему сигналу, включающему в себя команду управления током, регулируемую посредством величины регулирования текущей команды для регулирования команды управления током и сигнала пульсации для управления составляющей пульсации 2f-составляющей источника питания. Следовательно, предоставляется такое преимущество, что можно выполнять управление подавлением для 2f-составляющей источника питания при одновременном подавлении формирования перегрузки по току или чрезмерно большой пульсации крутящего момента в электродвигателе переменного тока в примере варианта применения, в котором одноимпульсный режим выбирается и используется как состояние переключения схемы инвертора.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
Фиг.1 изображает схему примера конфигурации устройства преобразования мощности для возбуждения электродвигателя в первом варианте осуществления настоящего изобретения.
Фиг.2 изображает схему примера подробной конфигурации блока формирования команд управления током, показанного на фиг.1.
Фиг.3 изображает схему примера подробной конфигурации блока формирования сигналов широтно-импульсной модуляции/команд управления напряжением, показанного на фиг.1.
Фиг.4 изображает схему примера подробной конфигурации блока вычисления сигналов подавления пульсаций, показанного на фиг.3.
Фиг.5 изображает диаграмму примера внутреннего состояния блока вычисления сигналов подавления пульсаций в первом варианте осуществления.
Фиг.6 изображает схему примера подробной конфигурации блока регулирования команд управления током, показанного на фиг.1.
Фиг.7 изображает укрупненную схему блока формирования команд управления коэффициентом модуляции, показанного на фиг.6.
Фиг.8 изображает диаграмму для пояснения соотношения между выходной частотой FINV инвертора и переходом коэффициента PMF модуляции, переходом импульсного режима и переходом работы переключателя выбора (см. фиг.3) в первом варианте осуществления.
Фиг.9 изображает диаграмму общих характеристик управления синхронных электродвигателей с постоянными магнитами в первом варианте осуществления настоящего изобретения и примере предшествующего уровня техники.
Фиг.10 изображает диаграмму для пояснения режимов управления в первом варианте осуществления настоящего изобретения.
Фиг.11 изображает схему примера конфигурации устройства преобразования мощности для возбуждения электродвигателя во втором варианте осуществления настоящего изобретения.
Фиг.12 изображает схему первого примера конфигурации блока формирования команд управления напряжением постоянного тока во втором варианте осуществления, показанном на фиг.11.
Фиг.13 изображает схему второго примера конфигурации блока формирования команд управления напряжением постоянного тока во втором варианте осуществления, показанном на фиг.11.
Фиг.14 является диаграммой для пояснения рабочих режимов в примере в предшествующем уровне техники.
Описание предпочтительных вариантов осуществления изобретения
Варианты осуществления устройства преобразования мощности для возбуждения электродвигателя согласно настоящему изобретению поясняются подробно ниже со ссылкой на прилагаемые чертежи. Настоящее изобретение не ограничено вариантами осуществления, поясненными ниже.
Первый вариант осуществления
Фиг.1 является схемой примера конфигурации устройства преобразования мощности для возбуждения электродвигателя в первом варианте осуществления настоящего изобретения. На фиг.1 показан пример конфигурации устройства преобразования мощности для возбуждения электродвигателя, которое управляет синхронным электродвигателем с постоянными магнитами в качестве электродвигателя переменного тока.
На фиг.1 устройство 300 преобразования мощности для возбуждения электродвигателя в первом варианте осуществления включает в себя преобразователь 220, выступающий в качестве первого блока преобразования мощности, который принимает однофазное напряжение переменного тока из источника 230 питания переменного тока и преобразует однофазное напряжение переменного тока в напряжение постоянного тока, конденсатор 1, выступающий в качестве источника питания постоянного тока, инвертор 2, выступающий в качестве второго блока преобразования мощности, который преобразует напряжение постоянного тока из конденсатора 1 в напряжение переменного тока, имеющее произвольную частоту, и электродвигатель 6 переменного тока (в дальнейшем просто называемый "электродвигателем"). В качестве преобразователя 220 однофазный двухуровневый ШИМ-преобразователь, однофазный трехуровневый ШИМ-преобразователь и т.п. является подходящим для применения. В качестве инвертора 2 является подходящим для применения инвертор на основе типа напряжения, такой как трехфазный двухуровневый ШИМ-инвертор или трехфазный трехуровневый ШИМ-инвертор. Поскольку конфигурации силовых схем обоих из преобразователя 220 и инвертора 2 являются общеизвестными, подробное пояснение преобразователя 220 и инвертора 2 опускается.
Источник 230 питания переменного тока является источником питания, который выводит, например, однофазное напряжение в 1-2 кВ переменного тока. Преобразователь 220 является блоком преобразователя напряжения, который принимает однофазное напряжение переменного тока в качестве ввода, преобразует однофазное напряжение переменного тока, например, в напряжение постоянного тока приблизительно в 1500-3000 В и выводит напряжение постоянного тока в конденсатор 1. Напряжение постоянного тока (напряжение конденсатора 1) как вывод преобразователя 220 включает в себя приблизительно 5% пульсации частотной составляющей, в два раза превышающей частоту источника питания источника 230 питания переменного тока (далее называемой "2f-составляющей источника питания").
Преобразователь 220 как первый блок преобразования мощности принимает однофазное напряжение переменного тока от источника 230 питания переменного тока, преобразует однофазное напряжение переменного тока в напряжение постоянного тока и выводит напряжение постоянного тока в конденсатор 1. В качестве преобразователя 220 может использоваться так называемый ШИМ-преобразователь, который выполняет преобразование из переменного тока в постоянный с использованием переключающего элемента (не показан), такого как IGBT (биполярный транзистор с изолированным затвором). Поскольку конфигурация силовой схемы преобразователя 220 является общеизвестной, подробное пояснение преобразователя 220 опускается.
Датчик 214 тока, который детектирует входной ток из источника 230 питания переменного тока, размещается в устройстве 300 преобразования мощности для возбуждения электродвигателя. Входной ток IS, детектируемый посредством датчика 214 тока, вводится в первый блок 200 управления. Управляющий сигнал CG для управления переключающим элементом преобразователя 220 формируется посредством первого блока 200 управления и выводится в преобразователь 220.
Датчик 8 напряжения, который детектирует напряжение (далее называемое "напряжением на конденсаторе") EFC конденсатора 1, размещается в устройстве 300 преобразования мощности для возбуждения электродвигателя. На выходной линии, соединяющей инвертор 2 и электродвигатель 6, размещаются датчики 3, 4 и 5 тока, которые детектируют электрические токи iu, iv и iw, протекающие к выходной линии. Датчик 7 поворота, который детектирует сигнал (механический угол θm ротора), представляющий состояние поворота ротора, размещается в электродвигателе 6. Эти сигналы детектирования датчиков 3, 4 и 5 тока и датчика 7 поворота вводятся во второй блок 100 управления.
Может использоваться бессенсорная система вращения, которая вычисляет сигнал положения из детектированного или оцененного значения напряжения, текущего значения и т.п. электродвигателя 6 вместо сигнала (сигнала положения), полученного из датчика 7 поворота. В этом случае датчик 7 вращения является необязательным. Другими словами, получение сигнала состояния поворота не ограничивается использованием датчика 7 поворота.
Датчики 3, 4 и 5 тока должны быть установлены, по меньшей мере, только в двух фазах. В этом случае ток в оставшейся одной фазе может быть получен посредством вычисления на основе заданных выходных сигналов датчиков тока в двух фазах. Выходной ток инвертора 2 может быть воспроизведен и получен с использованием постоянного тока инвертора 2.
Стробирующие сигналы U, V, W, X, Y и Z, сформированные посредством второго блока 100 управления, вводятся в инвертор 2. Переключающий элемент, включенный в инвертор 2, подвергается ШИМ-управлению. В качестве инвертора 2 ШИМ-инвертор напряжения является подходящим для использования. Поскольку конфигурация инвертора 2 является общеизвестной, подробное пояснение инвертора 2 опускается.
Конфигурация второго блока 100 управления поясняется ниже. Как показано на фиг.1, команда T* управления крутящим моментом вводится во второй блок 100 управления из непоказанного внешнего устройства управления. Этот второй блок 100 управления является компонентом, имеющим функцию управления инвертором 2 таким образом, что сформированный крутящий момент T электродвигателя 6 совпадает с входной командой T* управления крутящим моментом. Второй блок 100 управления включает в себя блок 10 формирования команд управления током, блок 150 вычисления индексов амплитуды напряжения, блок 40 вычисления управляющих фазовых углов, блок 50 формирования сигналов широтно-импульсной модуляции/команд управления напряжением, блок 80 регулирования команды управления током, блок 69 вычисления угловых частот инвертора, блок 95 вычисления опорных фазовых углов и блок 90 преобразования трехфазных координат по dq-осям. Блок 150 вычисления индексов амплитуды напряжения включает в себя блок 20 управления током d-оси, блок 21 вычисления развязки q-оси, блок 22 вычисления помехозащищенности d-оси, блок 23 управления током q-оси и блок 30 вычисления коэффициентов модуляции.
Блок 95 вычисления опорных фазовых углов вычисляет опорный фазовый угол θe из механического угла θm ротора. Блок 90 преобразования трехфазных координат по dq-осям формирует ток id d-оси и ток iq d-оси из трехфазного тока iu, iv и iw, детектируемого посредством датчиков 3, 4 и 5 тока, и опорного фазового угла θe. Блок 69 вычисления угловых частот инвертора вычисляет выходную угловую частоту ω инвертора из опорного фазового угла θe. Блок 10 формирования команд управления током формирует команду id* управления током d-оси и команду iq* управления током q-оси из команды T* управления крутящим моментом, вводимой извне, и регулирующего значения dV команды управления током.
Блок 20 управления током d-оси подвергает отклонение id тока между командой id* управления током d-оси и током id d-оси пропорционально-интегральному регулированию и формирует погрешность pde по току d-оси. Блок 21 вычисления развязки q-оси вычисляет прямое напряжение vqFF q-оси из команды id* управления током d-оси и выходной угловой частоты ω инвертора. Блок 22 вычисления помехозащищенности d-оси вычисляет прямое напряжение vdFF d-оси из команды iq* управления током q-оси и выходной угловой частоты ω инвертора. Блок 23 управления током q-оси подвергает отклонение diq тока между командой ip* управления током q-оси и током iq q-оси пропорционально-интегральному регулированию и формирует погрешность pqe по току q-оси. Блок 30 вычисления коэффициентов модуляции вычисляет коэффициент PMF модуляции из команды vd* управления напряжением d-оси, которая является суммой погрешности dpe по току d-оси и прямого напряжения vdFF d-оси, команды vq* управления напряжением q-оси, которая является суммой погрешности pqe по току q-оси и прямого напряжения vqFF q-оси, опорного фазового угла θe и напряжения EFC на конденсаторе.
Блок 40 вычисления управляющих фазовых углов вычисляет управляющий фазовый угол θ из команды vd* управления напряжением d-оси, команды vq* управления напряжением q-оси и опорного фазового угла θe. Блок 80 регулирования команд управления током формирует регулирующее значение dV команды управления током из коэффициента PMF модуляции и выходной частоты FINV инвертора. Блок 50 формирования сигналов широтно-импульсной модуляции/команд управления напряжением формирует из коэффициента PMF модуляции, управляющего фазового угла θ и выходной частоты FINV инвертора стробирующие сигналы U, V, W, X, Y и Z в инвертор 2.
Согласно функциям компонентов, сконфигурированных так, как пояснено выше, блок 150 вычисления индексов амплитуды напряжения формирует коэффициент PMF модуляции, команду vd* управления напряжением d-оси и команду vq* управления напряжением q-оси с использованием отклонения did тока, прямого напряжения vqFF q-оси, прямого напряжения vdFF d-оси, отклонения diq тока, напряжения EFC на конденсаторе и опорного фазового угла θe, выводит коэффициент PMF модуляции в блок 50 формирования сигналов широтно-импульсной модуляции/команд управления напряжением и выводит команду управления напряжением d-оси vd*a и команду vq* управления напряжением q-оси в блок 40 вычисления управляющих фазовых углов.
Согласно функциям компонентов, сконфигурированных так, как пояснено выше, второй блок 100 управления формирует стробирующие сигналы U, V, W, X, Y и Z с использованием механического угла θm ротора, трехфазных токов iu, iv и iw, команды T* управления крутящим моментом и напряжения EFC на конденсаторе и выводит стробирующие сигналы U, V, W, X, Y и Z в инвертор 2.
Подробные конфигурации и работа блоков управления, поясненных выше, поясняются ниже. Во-первых, блок 95 вычисления опорных фазовых углов вычисляет на основе следующей формулы опорный фазовый угол θe как электрический угол из механического угла θm ротора.
где PP представляет число пар полюсов электродвигателя 6.
Блок 90 преобразования трехфазных координат по dq-осям формирует, на основе следующей формулы ток id d-оси и ток iq q-оси из трехфазных токов iu, iv и iw и опорного фазового угла θe.

Блок 69 вычисления угловых частот инвертора вычисляет, на основе следующей формулы выходную угловую частоту ω инвертора посредством дифференцирования опорного фазового угла θe.
Когда выходная угловая частота ω инвертора вычисляется, выходная частота FINV инвертора, полученная посредством деления выходной угловой частоты ω инвертора на 2π, также вычисляется.
Подробная конфигурация и работа блока 10 формирования команд управления током поясняется ниже в отношении фиг.2. Фиг.2 является схемой примера подробной конфигурации блока 10 формирования команд управления током, показанного на фиг.1.
Блок 10 формирования команд управления током является компонентом, имеющим функцию формирования, на основе команды T* управления крутящим моментом, вводимой извне, команды id* управления током d-оси и команды iq* управления током q-оси. Блок 10 формирования команд управления током включает в себя блок 11 формирования команд управления базисным током d-оси, блок 15 формирования команд управления током q-оси и сумматор 14. Примеры способа формирования команды id* управления током d-оси и команды iq* управления током q-оси включают в себя способ управления максимальным крутящим моментом/током для формирования максимального крутящего момента с определенным электрическим током и способ управления на основе максимального кпд для поддержания кпд электродвигателя на максимуме. Эти оптимальные способы управления являются способами выполнения управления с использованием частоты вращения электродвигателя, абсолютной величины выходного крутящего момента и т.п. в качестве параметров таким образом, что фактический ток электродвигателя 6 совпадает с предварительно определенной формулой вычисления или оптимальной командой управления током составляющей крутящего момента (командой iq* управления током q-оси) и командой управления током составляющей магнитного потока (командой id* управления током d-оси), полученной посредством сохранения в таблице заранее.
В блоке 10 формирования команд управления током согласно этому варианту осуществления, как показано на фиг.2, команда T* управления крутящим моментом вводится в блок 11 формирования команд управления базисным током d-оси, и формируется команда id1* управления базисным током d-оси как первая команда управления током d-оси. В качестве способа формирования команды id1* управления базисным током d-оси известен способ управления максимальным крутящим моментом, с помощью которого электродвигатель 6 может формировать требуемый крутящий момент с минимальным током. Например, предусмотрен способ получения на основе команды T* управления крутящим моментом оптимальной команды id1* управления базисным током d-оси при обращении к карте и способ получения оптимальной команды id1* управления базисным током d-оси согласно арифметической формуле. В обоих способах блок 11 формирования команд управления базисным током d-оси может конфигурироваться с использованием различных общеизвестных технологий. Следовательно, более подробное пояснение опускается.
Команда id1* управления базисным током d-оси, сформированная посредством блока 11 формирования команд управления базисным током d-оси, вводится в сумматор 14 и суммируется с регулирующим значением dV команды управления током, посредством чего формируется команда id* управления током d-оси как вторая команда управления током d-оси. Регулирующее значение dV команды управления током, главным образом, принимает отрицательное значение и дает коррекцию в отрицательном направлении для команды id1* управления базисным током d-оси. Поясняя более подробно, регулирующее значение dV команды управления током выступает в качестве управляющего выходного сигнала для выполнения так называемого управления магнитным потоком с ослаблением поля для увеличения команды id* управления током d-оси в отрицательном направлении, формирования магнитного потока в направлении, в котором магнитный поток, сформированный посредством постоянного магнита, включенного в электродвигатель 6, подавляется, и ослабления потокосцепления электродвигателя 6, чтобы понижать напряжение электродвигателя 6. Регулирующее значение dV команды управления током является управляющим выходным сигналом, сформированным посредством блока 80 регулирования команд управления током. Подробная конфигурация блока 80 регулирования команд управления током поясняется ниже.
Команда id* управления током d-оси выводится в блок 150 вычисления индексов амплитуды напряжения как выходной сигнал блока 10 формирования команд управления током и, с другой стороны, вводится в блок 15 формирования команд управления током q-оси. В модуле 15 формирования команд управления током q-оси команда iq* управления током q-оси как первая команда управления током q-оси формируется из команды id* управления током d-оси и команды T* управления крутящим моментом. В качестве способа формирования команды iq* управления током q-оси, аналогично способу формирования команды id1* управления базисным током по d-оси, предусмотрен способ получения оптимальной команды iq* управления током q-оси при обращении к карте и способ получения оптимальной команды iq* управления током q-оси согласно формуле вычисления. В обоих способах блок 15 формирования команд управления током q-оси может конфигурироваться с использованием различных общеизвестных технологий. Следовательно, более подробное пояснение опускается.
Работа блока 150 вычисления индексов амплитуды напряжения поясняется далее. Снова ссылаясь на фиг.1, блок 23 управления током q-оси формирует на основе формулы (4) погрешность pqe по току q-оси, полученную посредством пропорционально-интегрального усиления разности между командой iq* управления током q-оси и током iq q-оси. Блок 20 управления током d-оси формирует на основе формулы (5) погрешность pde по току d-оси, полученную посредством пропорционально-интегрального усиления разности между командой id* управления током d-оси и током id d-оси.
В вышеприведенных формулах K1 и K3 представляют пропорциональные усиления, а K2 и K4 представляют интегральные усиления.
Согласно необходимости блок 150 вычисления индексов амплитуды напряжения может быть системой управления, которая может выбирать то, используются или нет pqe и pde для управления (т.е. то, заданы или нет значения pqe и pde равными нулю).
Блок 22 вычисления помехозащищенности d-оси вычисляет на основе формулы (6) прямое напряжение vdFF d-оси. Блок 21 вычисления развязки по q-оси вычисляет на основе формулы (7) прямое напряжение vqFF q-оси.
В вышеприведенных формулах R1 представляет сопротивление первичной обмотки (Ω) электродвигателя 6, Ld представляет индуктивность по d-оси (H), Lq представляет индуктивность по q-оси (H), ϕa представляет магнитный поток постоянного магнита (Wb) и s представляет оператор дифференцирования.
Блок 30 вычисления коэффициентов модуляции вычисляет на основе следующей формулы коэффициент PMF модуляции как индекс амплитуды напряжения из команды vd* управления напряжением d-оси, которая является суммой погрешности pde по току d-оси и прямого напряжения vdFF d-оси, команды vq* управления напряжением q-оси, которая является суммой погрешности pqe по току q-оси и прямого напряжения vqFF q-оси, опорного фазового угла θe и напряжения EFC на конденсаторе.
VMmax и VM* в формуле (8) представляются посредством следующих формул:
 /π)•EFC
/π)•EFC
Коэффициент PMF модуляции указывает абсолютную величину MV* вектора команд управления выходным напряжением инвертора как отношение к максимальному напряжению VMmax (заданному посредством формулы (9)), которое может выводиться посредством инвертора. Например, в случае PMF=1,0, абсолютная величина VM* вектора команд управления выходным напряжением инвертора равна максимальному напряжению VMmax, которое может выводиться посредством инвертора.
Как можно понять из формул (2)-(10), коэффициент PMF модуляции имеет характеристику, которую коэффициент PMF модуляции изменяет согласно команде id* управления током d-оси и команде iq* управления током q-оси, сформированной посредством блока 10 формирования команд управления током.
Блок 40 вычисления управляющих фазовых углов вычисляет на основе следующей формулы (11) управляющий фазовый угол θ из команды vd* управления напряжением d-оси, которая является суммой погрешности pde по току d-оси и прямого напряжения vdFF d-оси, команды vq* управления напряжением q-оси, которая является суммой погрешности pqe по току q-оси и прямого напряжения vqFF q-оси, и опорного фазового угла θe.
THV в формуле (11) представляется посредством следующей формулы:
Конфигурация и работа блока 50 формирования сигналов широтно-импульсной модуляции/команд управления напряжением поясняется в отношении фиг.3. Фиг.3 является схемой примера подробной конфигурации блока 50 формирования сигналов широтно-импульсной модуляции/команд управления напряжением, показанного на фиг.1.
Как показано на фиг.3, блок 50 формирования сигналов широтно-импульсной модуляции/команд управления напряжением включает в себя блок 71 вычисления сигналов подавления пульсаций, который принимает напряжение EFC на конденсаторе в качестве ввода и формирует сигнал BTPMFCMP подавления пульсаций. Блок 50 формирования сигналов широтно-импульсной модуляции/команд управления напряжением умножает коэффициент PMF модуляции на сигнал BTPMFCMP подавления пульсаций, чтобы формировать PMFM, который является сигналом команды управления амплитудой команд управления напряжением. Конфигурация блока 71 вычисления сигналов подавления пульсаций поясняется ниже.
Блок 55 вычисления команд управления напряжением формирует на основе следующей формулы команду Vu* управления напряжением U-фазы, команду Vv* управления напряжением V-фазы и команду Vw* управления напряжением W-фазы, которые являются командами управления трехфазным напряжением, из сигнала PMFM и управляющего фазового угла θ.
Абсолютные величины команды Vu* управления напряжением U-фазы, команды Vv* управления напряжением V-фазы и команды Vw* управления напряжением W-фазы, сформированных посредством блока 55 вычисления команд управления напряжением, сравниваются с несущим сигналом CAR посредством модулей 61-63 сравнения. Формируются стробирующие сигналы U, V и W и инвертированные стробирующие сигналы X, Y и Z, инвертированные через инвертирующие схемы 64-66.
Несущий сигнал CAR является одним из сигналов, выбранных в переключателе 59 выбора посредством процессора 60 импульсного режима, выступающего в качестве блока переключения импульсного режима. Любой из асинхронного многоимпульсного (в общем, приблизительно 1 кГц) несущего сигнала A, сформированного посредством блока 57 формирования асинхронного многоимпульсного несущего сигнала, синхронного трехимпульсного несущего сигнала B, сформированного посредством блока 58 формирования синхронной трехимпульсной несущей, и нулевого значения C, выбранного в синхронном одноимпульсном режиме, выбирается через переключатель 59 выбора. Асинхронный многоимпульсный несущий сигнал A и синхронный трехимпульсный несущий сигнал B принимают значения от -1 до 1, центрированные около нуля.
Процессор 60 переключения импульсного режима переключает переключатель 59 выбора согласно значениям коэффициента PMF модуляции и управляющего фазового угла θ. В частности, в области, в которой коэффициент PMF модуляции является низким (равен или меньше 0,785), переключатель 59 выбора переключается на сторону асинхронного многоимпульсного несущего сигнала A для выбора асинхронного многоимпульсного режима. Когда коэффициент PMF модуляции больше 0,785 и меньше 1,0, переключатель 59 выбора переключается на сторону синхронного трехимпульсного несущего сигнала B для выбора синхронного импульсного режима. Когда коэффициент PMF модуляции достигает приблизительно 1,0 (коэффициент PMF модуляции может быть 0,99 и т.п., а не только 1,0), переключатель 59 выбора переключается на сторону нулевого значения C. При такой конфигурации, во время, когда коэффициент PMF модуляции равен приблизительно 1,0, можно автоматически переключать импульсный режим на синхронный одноимпульсный режим. Наоборот, когда коэффициент PMF модуляции меньше приблизительно 1,0, можно автоматически переключать импульсный режим на синхронный трехимпульсный режим. Другими словами, можно легко осуществлять переход выходного напряжения инвертора 2 от минимума до максимума.
При переключении импульсного режима сигналом, к которому обращается процессор 60 переключения импульсного режима, предпочтительно является коэффициент PMF модуляции, который является сигналом до того, как сигнал BTPMFCMP подавления пульсаций, поясняемый ниже, отражается. Посредством выполнения конфигурации, в которой обращаются к коэффициенту PMF модуляции, можно предотвращать нестабильность операции переключения импульсного режима посредством процессора 60 переключения импульсного режима.
Синхронный трехимпульсный режим является импульсным режимом, необходимым для вывода напряжения, имеющего коэффициент PMF модуляции, равный или превышающий 0,785, который не может выводиться в асинхронном многоимпульсном режиме. Если способ перемодуляции используется в асинхронном многоимпульсном режиме, синхронном пятиимпульсном режиме, синхронном девятиимпульсном режиме и т.п., можно выводить напряжение, эквивалентное напряжению в синхронном трехимпульсном режиме. Тем не менее, когда этот способ используется, коэффициент PMF модуляции и выходное напряжение инвертора 2 являются чрезвычайно нелинейными. Следовательно, необходимо корректировать эту нелинейность. Имеется неудобство в том, что конфигурация является сложной.
В вышеуказанном пояснении порог коэффициента PMF модуляции для переключения асинхронного многоимпульсного несущего сигнала и синхронного трехимпульсного несущего сигнала задается равным 0,785. Тем не менее, может использоваться пороговое значение, отличное от 0,785.
Как пояснено ниже, несущий сигнал CAR по сравнению с командами управления напряжением имеет, по меньшей мере, асинхронный многоимпульсный несущий сигнал и синхронный несущий сигнал. Несущий сигнал CAR может выбираться согласно импульсному режиму, выбранному посредством процессора 60 импульсного режима, выступающего в качестве блока управления импульсного режима.
Асинхронный многоимпульсный несущий сигнал является несущим сигналом, определяющим частоту независимо от выходной частоты FINV инвертора. Частота составляет приблизительно 1000 Гц.
Частота синхронного несущего сигнала, такого как синхронный трехимпульсный несущий сигнал, определяется как функция от выходной частоты FINV инвертора таким образом, что число импульсов и положения импульсов, включенных в выходное напряжение инвертора, являются идентичными в полупериоде положительной стороны и полупериоде отрицательной стороны выходного напряжения инвертора. В этом варианте осуществления поясняется пример, в котором только синхронный трехимпульсный несущий сигнал используется как синхронный несущий сигнал. Тем не менее, синхронный несущий сигнал может быть, например, синхронным пятиимпульсным несущим сигналом и т.п., помимо синхронного трехимпульсного несущего сигнала. Множество синхронных несущих сигналов может быть подготовлено и включено согласно необходимости.
В состоянии, в котором выбирается асинхронный многоимпульсный режим, когда выходная частота FINV инвертора располагается около частоты асинхронного многоимпульсного несущего сигнала, сокращается число импульсов, включенных в полупериод выходного напряжения инвертора. Частота асинхронного многоимпульсного несущего сигнала является значением, определенным независимо от выходной частоты FINV инвертора. Следовательно, когда электродвигатель 6 возбуждается в этом состоянии, количества импульсов и положения импульсов, соответственно включенных в положительный полупериод и отрицательный полупериод выходного напряжения инвертора, выводятся из равновесия или временно колеблются, и положительная и отрицательная симметрия напряжения, приложенного к электродвигателю 6, нарушается. Колебание тока и пульсация крутящего момента возникают в электродвигателе 6, что вызывает шум и колебания.
С другой стороны, когда используется синхронный несущий сигнал, количества импульсов и положения импульсов, соответственно включенных в положительный полупериод и отрицательный полупериод выходного напряжения инвертора, равны, и обеспечивается положительная и отрицательная симметрия напряжения, приложенного к электродвигателю 6. Следовательно, можно препятствовать возникновению колебания тока и пульсации крутящего момента в электродвигателе 6 и стабильно возбуждать электродвигатель 6.
Относительно синхронного одноимпульсного режима число импульсов, включенных в полупериод выходного напряжения инвертора, всегда равно одному и является фиксированным без временного изменения. Следовательно, число импульсов и положения импульсов являются идентичными в положительном полупериоде и отрицательном полупериоде выходного напряжения инвертора. Может обеспечиваться положительная и отрицательная симметрия напряжения, приложенного к электродвигателю 6. Следовательно, нет опасения того, что колебание тока и пульсация крутящего момента возникают в электродвигателе 6.
Может быть добавлена конфигурация для точного регулирования распределения по времени переключения для импульсного режима согласно управляющему фазовому углу θ. Предоставляется такое преимущество, что можно подавлять пульсацию тока электродвигателя в ходе переключения импульсного режима.
Конфигурация и работа блока 71 вычисления сигналов подавления пульсаций, выступающего в качестве блока формирования сигналов подавления пульсаций, поясняется в отношении фиг.4. Фиг.4 является схемой примера подробной конфигурации блока 71 вычисления сигналов подавления пульсаций, показанного на фиг.3.
В блоке 71 вычисления сигналов подавления пульсаций, как показано на фиг.4, напряжение EFC на конденсаторе вводится в полосовой фильтр (далее называемый "BPF") 72. Напряжение EFC на конденсаторе фильтруется посредством BPF 72, и формируется сигнал EFCBP1. BPF 72 задается таким образом, что 2f-составляющая частоты источника питания источника 230 питания переменного тока может эффективно извлекаться.
В сумматоре 73 формируется сигнал EFCBP2 как сумма сформированного сигнала EFCBP1 и команды EFC* управления напряжением на конденсаторе, которая является командой управления напряжением для конденсатора 1. Команда EFC* управления напряжением на конденсаторе является целевым значением напряжения EFC на конденсаторе в момент, когда преобразователь 220 выполняет управление для преобразования напряжения переменного тока источника 230 питания переменного тока в напряжение постоянного тока (=напряжение EFC на конденсаторе). Обычно команда EFC* управления напряжением на конденсаторе принимает значение приблизительно в 1500-3000 В.
Вместо команды EFC* управления напряжением на конденсаторе может быть сформирован сигнал, полученный посредством прохождения напряжения EFC на конденсаторе через LPF (не показан) и удаления переменной составляющей тока, чтобы оставлять только постоянную составляющую тока. Этот сигнал может прибавляться к сигналу EFCBP1 посредством сумматора 73, чтобы формировать сигнал EFCBP2.
Команда EFC* управления напряжением на конденсаторе и сигнал EFCBP2, который является выводом сумматора 73, вводятся в делитель 74. В делителе 74 команда EFC* управления напряжением на конденсаторе делится на сигнал EFCBP2. Результат деления выводится как сигнал BTPMFCMP подавления пульсаций.
Аналогично сигналу EFCBP2 вместо команды EFC* управления напряжением на конденсаторе может быть сформирован сигнал, полученный посредством прохождения напряжения EFC на конденсаторе через LPF (не показан) и удаления переменной составляющей тока, чтобы оставлять только постоянную составляющую тока. Этот сигнал может быть разделен на сигнал EFCBP2 посредством делителя 74, чтобы формировать сигнал BTPMFCMP подавления пульсаций.
Сигнал BTPMFCMP подавления пульсаций, полученный таким образом, указывает обратное число соотношения напряжения EFCBP2 на конденсаторе, включающего в себя составляющую пульсации 2f-составляющей источника питания, к составляющей постоянного тока напряжения EFC на конденсаторе.
Фиг.5 является диаграммой примера внутреннего состояния блока 71 вычисления сигналов подавления пульсаций в первом варианте осуществления. На фиг.5 внутреннее состояние, в котором центральное значение напряжения EFC на конденсаторе составляет 3000 В, показано в качестве примера.
Как показано на фиг.5, напряжение EFC на конденсаторе включает в себя, вместе с 2f-составляющей источника питания составляющую пульсации, сформированную посредством операции переключения преобразователя 220 и имеющего частоту выше частоты 2f-составляющей источника питания (см. волнообразную форму в верхней ступенчатой части фигуры).
Сигнал EFCBP1 является сигналом, из которого составляющая пульсации удаляется посредством функции BPF 72, и включающим в себя только 2f-составляющую источника питания (см. волнообразную форму в средней верхней части чертежа).
Сигнал EFCBP2 является значением, полученным посредством прибавления EFC*, которая является командой управления напряжением на конденсаторе, к сигналу EFCBP1. Только 2f-составляющая источника питания включается в сигнал EFCBP2 как составляющая колебания (см. волнообразную форму в средней нижней ступенчатой части фигуры).
Можно видеть, что сигнал BTPMFCMP подавления пульсаций указывает обратное число напряжения EFCBP2 на конденсаторе, включающего в себя составляющую пульсации 2f-составляющей источника питания, относительно составляющей постоянного тока напряжения EFC на конденсаторе (см. волнообразную форму в средней нижней ступенчатой части фигуры).
Сигнал BTPMFCMP подавления пульсаций, который является выводом блока 71 вычисления сигналов подавления пульсаций, вводится в умножитель 70 блока 50 формирования сигналов широтно-импульсной модуляции/команд управления напряжением и умножается на коэффициент PMF модуляции (см. фиг.3). Посредством умножения сигнала BTPMFCMP подавления пульсаций на коэффициент PMF модуляции можно формировать сигнал PMFM команды управления амплитудой команд управления напряжением для подавления составляющей пульсации 2f-составляющей источника питания напряжения EFC на конденсаторе.
Как показано на фиг.3, команды управления выходным напряжением в инвертор 2 формируются на основе сигнала PMFM команды управления амплитудой команд управления напряжением. Таким образом, можно регулировать ширину импульса напряжения, выводимого посредством инвертора, чтобы подавлять 2f-составляющую источника питания. Следовательно, можно разрешать проблему в том, что электродвигатель переменного тока формирует перегрузку по току, и чрезмерно большая пульсация крутящего момента возникает в области, в которой выходная частота FINV инвертора и частота 2f-составляющей источника питания располагаются близко друг к другу.
Конфигурация и работа блока 80 регулирования команд управления током поясняется в отношении фиг.6. Фиг.6 является схемой примера подробной конфигурации блока 80 регулирования команд управления током, показанного на фиг.1.
Блок 80 регулирования команд управления током является компонентом, имеющим функцию формирования на основе выходной частоты FINV инвертора, регулирующего значения dV команды управления током. Блок 80 регулирования команд управления током включает в себя, как показано на фиг.6, блок 85 формирования команд управления коэффициентом модуляции, блок 84 вычитания, блок 81 ограничения и усилитель 82 (имеющий усиление K).
Блок 85 формирования команд управления коэффициентом модуляции работает как блок формирования целевых команд управления амплитудой напряжения и формирует на основе выходной частоты FINV инвертора команду PMF* управления коэффициентом модуляции, которая является целевой командой управления амплитудой напряжения. Блок 84 вычитания выводит значение, полученное посредством вычитания коэффициента PMF модуляции из команды PMF* управления коэффициентом модуляции. Блок 81 ограничения принимает вывод блока 84 вычитания как входной сигнал. Когда знак входного сигнала является плюсом, блок 81 ограничения задает вывод равным нулю. Когда знак входного сигнала является минусом, блок 81 ограничения непосредственно выводит входной сигнал. Усилитель 82 (имеющий усиление K) усиливает выходной сигнал и выводит усиливаемый сигнал как регулирующее значение dV команды управления током. Регулирующее значение dV команды управления током представляется, как указано посредством следующей формулы:
где LIM() представляет функцию для ограничения верхнего и нижнего пределов значения в круглых скобках согласно способу, поясненному выше.
Конфигурация и работа блока 85 формирования команд управления коэффициентом модуляции поясняется в отношении фиг.7. Фиг.7 является укрупненной схемой блока 85 формирования команд управления коэффициентом модуляции, показанного на фиг.6.
Как пояснено выше, блок 85 формирования команд управления коэффициентом модуляции формирует на основе выходной частоты FINV входного инвертора команду PMF* управления коэффициентом модуляции. Как показано на фиг.7, команда PMF* управления коэффициентом модуляции задается, например, равной 0,95 в области, в которой выходная частота FINV инвертора имеет значение в рамках 120 Гц (120 Гц ± 30 Гц), и задается равной 1,0 в других областях.
Посредством конфигурирования блока 85 формирования команд управления коэффициентом модуляции таким образом, когда выходная частота FINV инвертора находится в области приблизительно 120 Гц (120 Гц ± 30 Гц), можно формировать и управлять регулирующим значением dV команды управления током таким образом, что коэффициент PMF модуляции равен 0,95.
Область, в которой коэффициент PMF модуляции задается равным 0,95, поясняется как область, в которой выходная частота FINV инвертора имеет значение в рамках 120 Гц (120 Гц ± 30 Гц). Тем не менее, это является примером, в котором частота источника 230 питания переменного тока составляет 60 Гц. Это обусловлено тем, что 120 Гц эквивалентны 2f-составляющей в 60 Гц. С другой стороны, когда частота источника 230 питания переменного тока составляет 50 Гц, поскольку 2f-составляющая составляет 100 Гц, область, в которой коэффициент PMF модуляции задается равным 0,95, является областью, в которой выходная частота FINV инвертора составляет 100 Гц (100 Гц ± 30 Гц).
При конфигурации на основе фиг.6 и 7, в точке, когда коэффициент PMF модуляции превышает предварительно определенную команду PMF* управления коэффициентом модуляции, входной сигнал в блок 81 ограничения сокращается так, чтобы быть равным или меньшим нуля, и может быть сформировано отрицательное регулирующее значение dV команды управления током. Следовательно, можно выполнять управление магнитным потоком с ослаблением для обеспечения совпадения выходного напряжения инвертора 2 со значением, заданным посредством команды PMF* управления коэффициентом модуляции.
В частности, когда команда управления напряжением имеет допустимый запас относительно максимального выходного напряжения инвертора 2, регулирующее значение dV команды управления током не выводится. В точке, когда коэффициент PMF модуляции превышает команду PMF* управления коэффициентом модуляции (точке, когда команда управления напряжением превышает максимальное напряжение, заданное посредством команды PMF* управления коэффициентом модуляции), отрицательное значение возникает в выводе блока 81 ограничения, и выводится регулирующее значение dV команды управления током. Следовательно, необязательный ток id d-оси не подается, и электрический ток электродвигателя 6 может быть минимизирован.
Фиг.8 является диаграммой для пояснения соотношения между выходной частотой FINV инвертора и переходом коэффициента PMF модуляции, переходом импульсного режима и переходом работы переключателя 59 выбора (см. фиг.3) в первом варианте осуществления. Ускорение транспортного средства с электродвигателем из остановленного состояния поясняется в качестве примера ниже.
Как показано на фиг.8, когда транспортное средство с электродвигателем движется на низкой скорости, т.е. когда выходная частота FINV инвертора является низкой, коэффициент PMF модуляции является небольшим, импульсный режим является асинхронным многоимпульсным режимом, и A выбирается как переключатель 59 выбора. С другой стороны, когда скорость транспортного средства с электродвигателем увеличивается, и коэффициент PMF модуляции увеличивается так, чтобы быть равным или большим 0,785, выходное напряжение инвертора 2 насыщается в асинхронном многоимпульсном режиме. Следовательно, переключатель 59 выбора переключается в B, и импульсный режим переключается в синхронный трехимпульсный режим. Когда скорость транспортного средства с электродвигателем дополнительно увеличивается, и коэффициент PMF модуляции достигает 1,0, переключатель 59 выбора переключается в C, и импульсный режим переключается в синхронный одноимпульсный режим.
Замедление транспортного средства с электродвигателем посредством применения рекуперативного торможения не показывается на чертеже. Тем не менее, согласно порядку, противоположному порядку, поясненному выше, импульсный режим переходит из синхронного одноимпульсного режима в синхронный трехимпульсный режим и асинхронный многоимпульсный режим. Переключатель 59 выбора переключается в порядке C, B и A.
Преимущества устройства преобразования мощности для возбуждения электродвигателя согласно этому варианту осуществления поясняются относительно операций управления для компонентов, поясненных выше.
Фиг.9 является диаграммой общих характеристик управления синхронных электродвигателей с постоянными магнитами в первом варианте осуществления настоящего изобретения и примере в предшествующем уровне техники. Характеристики управления, показанные на фиг.9, являются характеристиками управления относительно синхронных электродвигателей с постоянными магнитами, разработанными для транспортных средств с электродвигателем. Предполагается, что максимальный выходной крутящий момент составляет 1500 ньютон-метров, а входное напряжение EFC составляет 3000 В. Синхронный электродвигатель с постоянными магнитами, работающий согласно другим параметрам, допускает аналогичные характеристики.
На фиг.9 абсцисса представляет ток id d-оси, и ордината представляет ток iq q-оси. Множество кривых (сплошные линии), присутствующих от части сверху справа до части снизу слева на чертеже, являются фиксированными кривыми крутящего момента и являются кривыми, указывающими соотношение между током id d-оси и током iq q-оси при соответствующих крутящих моментах T, описанных в левом конце чертежа (соотношение между векторами тока). Кривая (пунктирная линия) от части сверху слева до части снизу справа на чертеже является кривой, указывающей режим минимального тока, и является кривой, на которой минимизируется ток электродвигателя, когда выводится определенный крутящий момент T. Другими словами, кривая является кривой, указывающей режим, при котором возможно так называемое управление максимальным крутящим моментом/током для формирования максимального крутящего момента с минимальным током.
Если вектор тока управляется до точки пересечения кривой, указывающей режим минимального тока, и фиксированной кривой крутящего момента, можно получать крутящий момент T с минимальным током. Посредством выполнения такого управления предоставляется такое преимущество, что можно минимизировать потери в обмотке и потери в инверторе электродвигателя 6, когда получается определенный крутящий момент T, и можно уменьшать размер и вес электродвигателя 6 и инвертора 2. Например, когда требуется выводить крутящий момент T в 1000 ньютон-метров, если управление по току выполняется посредством инвертора 2 таким образом, что ток id d-оси находится близко с -125 А, и ток iq q-оси находится близко с 225 А (точка P1, показанная на чертеже), 1000 ньютон-метров могут быть сформированы посредством минимального тока.
На чертеже кривые (линии с попеременными длинным и коротким тире), нарисованные в форме возвышенности, являются предельными кривыми напряжения, которые являются фиксированными кривыми наведенного напряжения, и являются кривыми, указывающими соотношение между током id d-оси и током iq q-оси, при котором напряжение на контактных выводах электродвигателя 6 максимизируется при определенной выходной частоте FINV инвертора (соотношение между векторами тока). На чертеже показаны предельные кривые напряжения в пяти случаях (60 Гц, 90 Гц, 120 Гц, 150 Гц и 180 Гц), в которых выходная частота FINV инвертора задается как параметр при условии, что входное напряжение EFC инвертора 2 задается равным 3000 В.
Комбинация тока id d-оси и тока iq q-оси, которая может логически выбираться (вектор тока), находится на внутренней стороне предельных кривых напряжения (в нижней стороне кривых). Когда электродвигатель 6 работает с векторами тока, присутствующими на линиях предельных кривых напряжения, линейное напряжение электродвигателя 6 максимизируется (т.е. состояние, в котором коэффициент PMF модуляции инвертора 2 равен 1,0, и выводится максимальное напряжение). Крутящий момент T, который может выводиться на этом этапе, является крутящим моментом T в точке пересечения предельной кривой напряжения и фиксированной кривой крутящего момента.
Когда электродвигатель 6 работает с векторами тока, присутствующими на внутренней стороне (нижней стороне) предельных кривых напряжения, линейное напряжение электродвигателя 6 принимает значение, равное или большее нуля и меньшее максимального значения (т.е. коэффициент PMF модуляции инвертора 2 меньше 1,0).
Векторы тока, присутствующие на внешней стороне предельных кривых напряжения (верхней стороне кривых), не могут выбираться, поскольку векторы тока находятся в области, превышающей максимальное выходное напряжение инвертора 2.
Как можно понять из предельных кривых напряжения при выходных частотах инвертора FINV (60 Гц, 90 Гц, 120 Гц, 150 Гц и 180 Гц) в этих пяти случаях, показанных на фиг.9, по мере того как скорость электродвигателя 6 увеличивается и выходная частота FINV инвертора увеличивается, предельные кривые напряжения перемещаются к нижней стороне чертежа, векторы тока, которые могут выбираться, ограничиваются, и максимальное значение крутящего момента T, который может выводиться, сокращается. По мере того как выходная частота FINV инвертора увеличивается, крутящий момент T, который может быть сформирован на кривой, указывающей режим минимального тока, также понижается.
Когда напряжение EFC на конденсаторе повышается, предельная кривая напряжения при идентичной выходной частоте FINV инвертора перемещается к верхней стороне на чертеже. Когда напряжение EFC на конденсаторе падает, предельная кривая напряжения при идентичной выходной частоте FINV инвертора перемещается к нижней стороне на чертеже.
Например, когда выходная частота FINV инвертора составляет 60 Гц, рабочая точка, удовлетворяющая режиму минимального тока при максимальном крутящем моменте 1500 ньютон-метров (около тока id d-оси = -175 A, около тока iq q-оси = 295 A, точка A на чертеже), является точкой, достаточно удаленной к нижней стороне от предельной кривой напряжения.
С другой стороны, когда выходная частота FINV инвертора составляет 150 Гц, максимальный крутящий момент, который может быть сформирован, составляет приблизительно 1200 ньютон-метров (точка P2 на чертеже) около тока id d-оси = -245 A и около тока iq q-оси = 200 A на предельной кривой напряжения. Аналогично, максимальный крутящий момент, который может быть сформирован в режиме минимального тока, составляет приблизительно 930 ньютон-метров (точка P3 на чертеже) около тока id d-оси = -120 A и около тока iq q-оси = 210 A на предельной кривой напряжения. Работа в режиме минимального тока невозможна в области от 930 ньютон-метров до 1200 ньютон-метров. Это область, в которой работа возможна посредством выполнения управления магнитным потоком с ослаблением для отрицательного увеличения тока id d-оси.
Тем не менее, по мере того как управление магнитным потоком с ослаблением выполняется глубже (по мере того как ток id d-оси отрицательно увеличивается), вектор тока, сформированный посредством тока id d-оси и тока iq q-оси, увеличивается, и электрический ток электродвигателя 6 увеличивается.
В частности, чтобы минимизировать потери в обмотке электродвигателя 6 и потери инвертора 2, желательно управлять инвертором 2 так, чтобы выбирать вектор тока (комбинацию тока id d-оси и тока iq q-оси) на кривой режима минимального тока в максимально возможной степени и инструктировать электродвигатель 6 формировать требуемый крутящий момент. Когда выходная частота FINV инвертора увеличивается согласно увеличению скорости вращения электродвигателя 6, в области, в которой требуемый крутящий момент не может выводиться на кривой режима минимального тока вследствие ограничения предельной кривой напряжения, в общем, ток id d-оси отрицательно увеличивается, и выполняется управление магнитным потоком с ослаблением.
Помимо управления в режиме минимального тока, поясненного выше (управления максимальным крутящим моментом/током), также можно управлять вектором тока на кривой максимальной эффективности (не показана), для которого потери электродвигателя 6, включающие в себя потери в сердечнике электродвигателя 6, минимизированы, и применять управление на основе максимальной эффективности для управления электродвигателем 6.
Поясняется рабочая характеристика для настоящего изобретения, выполняемая в области, в которой управление переключается в синхронный одноимпульсный режим (т.е. области, в которой коэффициент PMF модуляции принимает значение, близкое к 1,0) или когда выходная частота FINV инвертора находится вблизи 2f-составляющей источника питания во время работы в синхронном одноимпульсном режиме.
Во-первых, поясняется операция управления в вышеприведенном примере, чтобы прояснять детали проблемы. Затем средство разрешения проблем в первом варианте осуществления настоящего изобретения поясняется в отношении фиг.14. Фиг.14 является диаграммой для пояснения рабочего режима в примере в предшествующем уровне техники, на которой MPM, 3PM и 1PM означают асинхронный многоимпульсный режим, синхронный трехимпульсный режим и синхронный одноимпульсный режим соответственно. Пример управления, в котором электродвигатель 6 запускается и ускоряется из состояния, в котором электродвигатель 6 остановлен, показывается на фиг.14. Рабочие точки A, B, C1, D и E, показанные на фиг.14 соответственно, соответствуют рабочим точкам A, B, C1, D и E, показанным на фиг.9.
На фиг.14, во-первых, инвертор 2 запускается при нуле шкалы времени, команда крутящего момента T задается равной 1500 ньютон-метров, и напряжение прикладывается к электродвигателю 6, чтобы начинать ускорение. Здесь коэффициент PMF модуляции увеличивается с нуля в пропорции к выходной частоте FINV инвертора. До тех пор пока коэффициент PMF модуляции не достигает 0,785 от нуля шкалы времени, асинхронный многоимпульсный режим выбирается как импульсный режим инвертора 2, и крутящий момент T является фиксированным при 1500 ньютон-метрах. Следовательно, электродвигатель 6 линейно ускоряется, и выходная частота FINV инвертора линейно увеличивается.
В точке, когда коэффициент модуляции достигает 0,785, импульсный режим переключается в синхронный трехимпульсный режим. Между точкой A и точкой B, поскольку коэффициент PMF модуляции достигает максимального значения 1,0, импульсный режим переключается из синхронного трехимпульсного режима в синхронный одноимпульсный режим. Между точкой A (выходная частота FINV инвертора = 60 Гц) и точкой B (выходная частота FINV инвертора = 90 Гц) команда крутящего момента T уменьшается от 1500 ньютон-метров в обратной пропорции к выходной частоте FINV инвертора. После того как коэффициент PMF модуляции достигает 1,0, сформированная величина dV регулирования команд управления током увеличивается к отрицательной стороне согласно увеличению выходной частоты FINV инвертора. Следовательно, поскольку команда id* управления током d-оси отрицательно увеличивается, выполняется управление магнитным потоком с ослаблением. Следовательно, команда id* управления током d-оси регулируется таким образом, что коэффициент PMF модуляции совпадает с командой PMF* управления коэффициентом модуляции (=1,0).
Путь вектора тока в режиме управления, поясненном выше, поясняется в отношении фиг.9. На фиг.9, как пояснено выше, поскольку рабочая точка A находится на нижней стороне предельной кривой напряжения и далеко от предельной кривой напряжения, коэффициент PMF модуляции меньше 1,0, и выходное напряжение инвертора 2 является значением, меньшим максимального напряжения, которое может выводиться.
В рабочей точке B команда крутящего момента T составляет 1400 ньютон-метров, и вектор тока управляется к точке, в которой команда id* управления током d-оси составляет приблизительно -170 А, и команда iq* управления током q-оси составляет приблизительно 277 А. В этой рабочей точке B вектор тока также поддерживается на предельной кривой напряжения при FINV = 90 Гц. Регулирующее значение dV команды управления током формируется и управляется таким образом, что коэффициент PMF модуляции равен 1,0.
В рабочей точке C1 команда крутящего момента T составляет 1200 ньютон-метров, и вектор тока управляется к точке, в которой команда id* управления током d-оси составляет -160 А, и команда iq* управления током q-оси составляет приблизительно 243 А. В этой рабочей точке C1 вектор тока также поддерживается на предельной кривой напряжения при FINV = 120 Гц. Регулирующее значение dV команды управления током формируется и управляется таким образом, что коэффициент PMF модуляции равен 1,0.
В рабочей точке D команда крутящего момента T составляет 1100 ньютон-метров, и вектор тока управляется к точке, в которой команда id* управления током d-оси составляет -177 А, и команда iq* управления током q-оси составляет приблизительно 220 А. В этой рабочей точке D вектор тока также поддерживается на предельной кривой напряжения при FINV = 150 Гц. Регулирующее значение dV команды управления током формируется и управляется таким образом, что коэффициент PMF модуляции равен 1,0.
В рабочей точке E команда крутящего момента T составляет 1000 ньютон-метров, и вектор тока управляется к точке, в которой команда id* управления током d-оси составляет -180 А, и команда iq* управления током q-оси составляет приблизительно 195 А. В этой рабочей точке E вектор тока также поддерживается на предельной кривой напряжения при FINV = 180 Гц. Регулирующее значение dV команды управления током формируется и управляется таким образом, что коэффициент PMF модуляции равен 1,0.
Таким образом, в примере управления в предшествующем уровне техники управляющая рабочая точка переходит от рабочей точки A к рабочим точкам B, C1, D и E. После того как коэффициент PMF модуляции достигает 1,0, регулирующее значение dV команды управления током формируется, чтобы поддерживать выходное напряжение инвертора 2 при максимальном значении, которое может выводиться при одновременном выводе крутящего момента T (чтобы поддерживать коэффициент PMF модуляции = 1,0). Управление магнитным потоком с ослаблением выполняется согласно команде id* управления током d-оси, включающей в себя величину dV регулирования команды управления током.
Согласно управлению, в примере управления в предшествующем уровне техники после того как коэффициент модуляции достигает 1,0, чтобы поддерживать коэффициент PMF модуляции равным 1,0 и поддерживать приложенное напряжение к электродвигателю переменного тока на максимуме, синхронный одноимпульсный режим выбирается в состоянии переключения схемы инвертора. В рабочей области этого синхронного одноимпульсного режима, как пояснено выше, поскольку регулирование ширины импульса не может выполняться, управление для подавления 2f-составляющей источника питания не может выполняться, в частности, в области, в которой выходная частота FINV инвертора располагается вблизи 2f-составляющей источника питания. Следовательно, возникает проблема в том, что электродвигатель переменного тока формирует перегрузку по току, и возникает чрезмерно большая пульсация крутящего момента.
Операция управления в первом варианте осуществления для разрешения проблемы поясняется в отношении фиг.10. Фиг.10 является диаграммой для пояснения режимов управления в первом варианте осуществления настоящего изобретения. Показан пример управления, выполняемого, когда электродвигатель 6 запускается и ускоряется из состояния, в котором электродвигатель 6 остановлен. Рабочие точки A, B, C, D и E, показанные на фиг.10 соответственно, соответствуют рабочим точкам A, B, C, D и E, показанным на фиг.9.
На фиг.10, во-первых, инвертор 2 запускается при нуле шкалы времени, команда крутящего момента T задается равной 1500 ньютон-метрам, и напряжение прикладывается к электродвигателю 6, чтобы начинать ускорение. Коэффициент PMF модуляции увеличивается с нуля в пропорции к выходной частоте FINV инвертора. До тех пор пока коэффициент PMF модуляции не достигает 0,785 от нуля шкалы времени, асинхронный многоимпульсный режим выбирается как импульсный режим инвертора 2, и крутящий момент T является фиксированным при 1500 ньютон-метрах. Следовательно, электродвигатель 6 линейно ускоряется, и выходная частота FINV инвертора линейно увеличивается.
В точке, когда коэффициент модуляции достигает 0,785, импульсный режим переключается в синхронный трехимпульсный режим. Между точкой A и точкой B, поскольку коэффициент PMF модуляции достигает максимального значения 1,0, импульсный режим переключается из синхронного трехимпульсного режима в синхронный одноимпульсный режим. Между точкой A (выходная частота FINV инвертора = 60 Гц) и точкой B (выходная частота FINV инвертора = 90 Гц) команда крутящего момента T уменьшается от 1500 ньютон-метров в обратной пропорции к выходной частоте FINV инвертора. После того как коэффициент PMF модуляции достигает 1,0, сформированная величина dV регулирования команд управления током отрицательно увеличивается согласно увеличению выходной частоты FINV инвертора. Следовательно, поскольку команда id* управления током d-оси отрицательно увеличивается, выполняется управление магнитным потоком с ослаблением. Следовательно, команда id* управления током d-оси регулируется таким образом, что коэффициент PMF модуляции совпадает с командой PMF* управления коэффициентом модуляции (=1,0). Вышеприведенная операция управления является эквивалентной операции в примере в предшествующем уровне техники.
С другой стороны, область между рабочей точкой B и рабочей точкой D является областью, в которой выходная частота FINV инвертора и 2f-составляющая источника питания располагаются друг около друга. Рабочая точка C является рабочей точкой, в которой выходная частота FINV инвертора составляет 120 Гц, и является точкой, в которой частота 2f-составляющей источника питания в момент, когда частота источника 230 питания переменного тока составляет 60 Гц, и выходная частота FINV инвертора точно совпадают друг с другом.
Следовательно, в этом варианте осуществления, в диапазоне от рабочей точки B до рабочей точки D, который является диапазоном, в котором выходная частота FINV инвертора и 2f-составляющая источника питания располагаются близко друг к другу или совпадают друг с другом, команда PMF* управления коэффициентом модуляции уменьшается с 1,0 до 0,95. Согласно этому управлению возникает отклонение между коэффициентом PMF модуляции и командой PMF* управления коэффициентом модуляции. Следовательно, регулирующее значение dV команды управления током формируется на основе этого отклонения. Сформированная команда id* управления током d-оси работает на основе регулирующего значения dV команды управления током, чтобы дополнительно увеличиваться в отрицательном направлении. Следовательно, команда id* управления током d-оси и команда iq* управления током q-оси формируются как вектор тока, расположенный на фиксированной кривой крутящего момента, соответствующей команде крутящего момента T, и на внутренней стороне (нижней стороне) предельной кривой напряжения около FINV = 120 Гц. Согласно команде id* управления током d-оси и команде iq* управления током q-оси, сформированной таким образом, управление магнитным потоком с ослаблением, применяемое к электродвигателю 6, становится более глубоким, и наведенное напряжение электродвигателя 6 дополнительно падает. Следовательно, коэффициент PMF модуляции также падает. Коэффициент PMF модуляции управляется так, чтобы совпадать с командой PMF* управления коэффициентом модуляции.
В этой области устройство преобразования мощности для возбуждения электродвигателя согласно этому варианту осуществления уменьшает коэффициент PMF модуляции так, чтобы он был меньше обычного коэффициента модуляции, чтобы переключать импульсный режим в синхронный трехимпульсный режим, который является синхронным импульсным режимом. Следовательно, согласно сигналу BTPMFCMP подавления пульсаций, который является выводом блока 71 вычисления сигналов подавления пульсаций, можно выполнять регулирование ширины импульса для выходного напряжения, выводимого посредством инвертора 2. Можно выполнять управление для подавления 2f-составляющей источника питания. Согласно этому управлению можно разрешать проблему в том, что электродвигатель переменного тока формирует перегрузку по току и возникает чрезмерно большая пульсация крутящего момента.
Поскольку синхронный трехимпульсный режим, который является синхронным импульсным режимом, выбирается как импульсный режим, количества импульсов и положения импульсов, соответственно, включенных в положительный полупериод и отрицательный полупериод инвертора 2, равны, и обеспечивается положительная и отрицательная симметрия напряжения, приложенного к электродвигателю 6. Следовательно, можно препятствовать возникновению колебания тока и пульсации крутящего момента в электродвигателе 6, предотвращать возникновение шума и колебания вследствие колебания тока и пульсации крутящего момента и выполнять стабильное возбуждение электродвигателя 6. Операции после рабочей точки D являются идентичными операциям в примере в предшествующем уровне техники, поясненном выше.
Таким образом, при управлении согласно этому варианту осуществления, рабочая точка переходит в порядке рабочих точек A, B, C, D и E. Команды крутящего момента T в рабочих точках A, B, C, D и E, соответственно, составляют 1500 ньютон-метров, 1400 ньютон-метров, 1200 ньютон-метров, 1100 ньютон-метров и 1000 ньютон-метров. Команды крутящего момента T являются идентичными командам в рабочих точках A, B, C1, D и E примера в предшествующем уровне техники. Другими словами, в этом варианте осуществления, в то время, когда управление для подавления 2f-составляющей источника питания выполняется, на выходную характеристику крутящего момента T не оказывается влияние в рабочих точках, включающих в себя рабочую точку C.
С другой стороны, поскольку рабочая точка C1 в примере в предшествующем уровне техники и рабочая точка C в этом варианте осуществления находятся на идентичной фиксированной кривой крутящего момента (при 1200 ньютон-метрах), соответствующей предварительно определенному значению команды управления крутящим моментом, крутящий момент, выводимый посредством электродвигателя 6, является идентичным как в рабочей точке C1, так и в рабочей точке C. Другими словами, в этом варианте осуществления можно уменьшать коэффициент PMF модуляции, например, до 0,95, при одновременном поддержании выходного крутящего момента электродвигателя 6 неизменным, понижая наведенное напряжение электродвигателя 6 и понижая выходное напряжение инвертора 2. Поскольку коэффициент PMF модуляции уменьшается так, чтобы быть ниже обычного коэффициента модуляции, и импульсный режим переключается в синхронный трехимпульсный режим, который является синхронным импульсным режимом, можно регулировать ширину импульса напряжения, выводимого посредством инвертора 2, согласно выводу блока 71 вычисления сигналов подавления пульсаций и выполнять управление для подавления 2f-составляющей источника питания. Следовательно, разрешается проблема в предшествующем уровне техники в том, что электродвигатель переменного тока формирует перегрузку по току и возникает чрезмерно большая пульсация крутящего момента.
Формируются команды управления током (команда id* управления током d-оси и команда iq* управления током q-оси), при которых коэффициент PMF модуляции совпадает с командой PMF* управления коэффициентом модуляции. Следовательно, можно уменьшать коэффициент PMF модуляции, например, до 0,95 при одновременном поддержании выходного крутящего момента электродвигателя 6 при предварительно определенном значении, понижая наведенное напряжение электродвигателя 6 и понижая выходное напряжение инвертора 2.
В примере, поясненном выше, электродвигатель 6 ускоряется из остановленного состояния. Тем не менее, конфигурация, поясненная в этом варианте осуществления, также может применяться, когда электродвигатель 6 подвергается операции рекуперации и останавливается в ходе высокоскоростного вращения.
Второй вариант осуществления
В первом варианте осуществления раскрыта конфигурация, в которой величина регулирования команд управления током для регулирования команды управления током для устройства преобразования мощности для возбуждения электродвигателя управляется надлежащим образом, или переключение импульсного режима управляется надлежащим образом, чтобы обеспечить регулирование ширины импульса напряжения, выводимого посредством инвертора 2, и обеспечить эффективное выполнение управления для подавления 2f-составляющей источника питания, включенного в выходное напряжение инвертора 2. Во втором варианте осуществления раскрыта конфигурация, в которой команда управления напряжением преобразователя для управления преобразователем 220 дополнительно формируется надлежащим образом, чтобы обеспечить эффективное уменьшение электрического тока, подаваемого в электродвигатель 6.
Фиг.11 является схемой примера конфигурации устройства преобразования мощности для возбуждения электродвигателя согласно второму варианту осуществления настоящего изобретения. Более подробная конфигурация преобразователя 220, который является первым блоком преобразования мощности, в конфигурации устройства преобразования мощности для возбуждения электродвигателя, показанной на фиг.1, поясняется ниже. Из компонентов, показанных на фиг.11, компоненты, идентичные компонентам, показанным на фиг.11, уже пояснены. Следовательно, главным образом, поясняются компоненты, связанные со вторым вариантом осуществления.
Как показано на фиг.11, коэффициент PMF модуляции и выходная частота FINV инвертора, сформированные посредством второго блока 100 управления, напряжение EFC на конденсаторе, определяемое посредством датчика 8 напряжения, и входной ток IS, определяемый посредством датчика 214 тока, вводятся в первый блок 200 управления. Этот первый блок 200 управления является компонентом, имеющим функцию управления выходным напряжением (напряжением постоянного тока) преобразователя 220, и включает в себя блок 210 формирования команд управления напряжением постоянного тока и блок 280 управления напряжением постоянного тока.
Блок 210 формирования команд управления напряжением постоянного тока формирует команду EFC* управления напряжением постоянного тока, которая является целевым значением напряжения на конденсаторе и является командой EFC* управления напряжением на конденсаторе. Блок 211 управления напряжением принимает ввод команды EFC* управления напряжением постоянного тока и напряжения EFC на конденсаторе и формирует на основе отклонения между командой EFC* управления напряжением постоянного тока и напряжением EFC на конденсаторе команду IS* управления током и выводит команду IS* управления током. Блок 212 управления током принимает ввод команды IS* управления током и входного тока IS, определяемых посредством датчика 214 тока, и формирует на основе отклонения между командой IS* управления током и входным током IS команду VC* управления напряжением преобразователя. Блок 213 формирования сигналов широтно-импульсной модуляции принимает ввод команды VC* управления напряжением преобразователя и формирует сигнал включения/выключения (сигнал широтно-импульсной модуляции) CG для переключающего элемента (не показан) преобразователя 220 для обеспечения совпадения напряжения на входной стороне (стороне источника питания переменного тока) преобразователя 220 с командой VC* управления напряжением преобразователя.
С помощью функций блока 211 управления напряжением, блока 212 управления током и блока 213 формирования сигналов широтно-импульсной модуляции, сконфигурированных так, как пояснено выше, блок 280 управления напряжением постоянного тока формирует сигнал широтно-импульсной модуляции CG с использованием команды EFC* управления напряжением постоянного тока, напряжения EFC на конденсаторе и входного тока IS и выводит сигнал широтно-импульсной модуляции CG в преобразователь 220.
Подробная конфигурация и работа блока 210 формирования команд управления напряжением постоянного тока поясняется ниже в отношении фиг.12. Фиг.12 является схемой первого примера конфигурации блока 210 формирования команд управления напряжением постоянного тока во втором варианте осуществления, показанном на фиг.11.
Как показано на фиг.12, блок 210 формирования команд управления напряжением постоянного тока, который является первым примером конфигурации, включает в себя таблицу 240 команд управления напряжением постоянного тока. Таблица 240 команд управления напряжением постоянного тока формирует, на основе выходной частоты FINV инвертора команду EFC* управления напряжением постоянного тока и выводит команду EFC* управления напряжением постоянного тока.
Когда выходная частота FINV инвертора не располагается около частоты 2f-составляющей источника питания, таблица 240 команд управления напряжением постоянного тока выводит напряжение в течение расчетного времени как команду EFC* управления напряжением постоянного тока. С другой стороны, когда выходная частота FINV инвертора располагается около частоты 2f-составляющей источника питания, таблица 240 команд управления напряжением постоянного тока выводит команду управления напряжением выше напряжения в течение расчетного времени как команду EFC* управления напряжением постоянного тока.
Например, когда частота источника питания переменного тока составляет 60 Гц, если выходная частота FINV инвертора не находится в диапазоне приблизительно 90-150 Гц, центрированном вокруг 120 Гц, которая является частотой 2f-составляющей источника питания, таблица 240 команд управления напряжением постоянного тока выводит, например, 3000 В как команду EFC* управления напряжением постоянного тока. Если выходная частота FINV инвертора находится в диапазоне приблизительно 90-150 Гц, таблица 240 команд управления напряжением постоянного тока выводит, например, 3300 В, что получается посредством увеличения напряжения в течение расчетного времени приблизительно на 5-10%, как команду EFC* управления напряжением постоянного тока.
Посредством конфигурирования блока 210 формирования команд управления напряжением постоянного тока таким образом, когда выходная частота FINV инвертора находится в области вблизи частоты 2f-составляющей источника питания, например, области 90-150 Гц, можно управлять напряжением EFC на конденсаторе так, чтобы оно было высоким, и, следовательно, увеличивать максимальное напряжение, которое может выводиться посредством инвертора 2. Согласно этому управлению можно уменьшать необходимую величину магнитного потока с ослаблением. Как результат, можно также уменьшать величину dV регулирования команд управления током и уменьшать абсолютную величину команды id* управления током d-оси. Следовательно, можно уменьшать электрический ток электродвигателя 6 по сравнению с электрическим током, выводимым, когда конфигурация первого блока 200 управления согласно второму варианту осуществления не применяется.
Блок 210 формирования команд управления напряжением постоянного тока не ограничивается конфигурацией, показанной на фиг.12, и может конфигурироваться, например, как показано на фиг.13. Фиг.13 является схемой второго примера конфигурации блока 210 формирования команд управления напряжением постоянного тока во втором варианте осуществления, показанном на фиг.11.
Блок 210 формирования команд управления напряжением постоянного тока, показанный на фиг.13, является компонентом, который формирует на основе выходной частоты FINV инвертора и команды PMF* управления коэффициентом модуляции как целевого значения коэффициента PMF модуляции (индекса амплитуды напряжения) команду EFC* управления напряжением постоянного тока и включает в себя таблицу 250 команд управления коэффициентом модуляции, блок 251 вычитания, блок 252 ограничения, блок 253 пропорционального интегрирования и сумматор 254.
Таблица 250 команд управления коэффициентом модуляции формирует на основе входной выходной частоты FINV инвертора, команду PMF* управления коэффициентом модуляции. Блок 251 вычитания принимает ввод коэффициента PMF модуляции и команды PMF* управления коэффициентом модуляции, формирует сигнал отклонения, полученный посредством вычитания команды PMF* управления коэффициентом модуляции из коэффициента PMF модуляции, и выводит сигнал отклонения в блок 252 ограничения. Когда знак входного сигнала является плюсом, блок 252 ограничения непосредственно выводит входной сигнал. Когда знак входного сигнала является минусом, блок 252 ограничения выводит нуль независимо от значения входного сигнала. Блок 253 пропорционального интегрирования выводит значение, полученное посредством вычисления пропорционального интегрального выходного сигнала блоком 252 ограничения. Сумматор 254 суммирует выходной сигнал блока 253 пропорционального интегрирования и команду EFC0* управления базисным напряжением постоянного тока (например, 3000 В) и выводит прибавленный сигнал как команду EFC* управления напряжением постоянного тока.
Например, когда частота источника питания переменного тока составляет 60 Гц, если выходная частота FINV инвертора не находится в диапазоне приблизительно 90-150 Гц, центрированном вокруг 120 Гц, которая является частотой 2f-составляющей источника питания, таблица 250 команд управления коэффициентом модуляции выводит, например, 1,0 как команду PMF* управления коэффициентом модуляции. С другой стороны, если выходная частота FINV инвертора находится в диапазоне приблизительно 90-150 Гц, таблица 250 команд управления коэффициентом модуляции выводит, например, 0,95 как команду PMF* управления коэффициентом модуляции.
Посредством конфигурирования блока 210 формирования команд управления напряжением постоянного тока таким образом, когда выходная частота FINV инвертора находится, например, в области 90-150 Гц, можно увеличивать напряжение EFC на конденсаторе таким образом, что коэффициент PMF модуляции инвертора 2 составляет, например, 0,95. Следовательно, можно увеличивать максимальное напряжение, которое может выводить инвертор 2. Согласно этому управлению можно уменьшать необходимую величину магнитного потока с ослаблением. Как результат, можно также уменьшать величину dV регулирования команд управления током и уменьшать абсолютную величину команды id* управления током d-оси. Следовательно, можно уменьшать электрический ток электродвигателя 6 по сравнению с электрическим током, выводимым, когда не применяется конфигурация первого блока 200 управления согласно второму варианту осуществления.
При конфигурации первого варианта осуществления, поясненной выше, можно уменьшать коэффициент PMF модуляции, например, до 0,95 при одновременном поддержании выходного крутящего момента электродвигателя 6 при предварительно определенном значении команды управления, понижая наведенное напряжение электродвигателя 6 и понижая выходное напряжение инвертора 2 в области, в которой выходная частота FINV инвертора располагается около частоты 2f-составляющей источника питания. Следовательно, поскольку импульсный режим переключается в синхронный трехимпульсный режим, который является синхронным импульсным режимом, можно регулировать ширину импульса напряжения, выводимого посредством инвертора 2, согласно сигналу BTPMFCMP подавления пульсаций, который является выводом блока 71 вычисления сигналов подавления пульсаций, и выполнять управление для подавления 2f-составляющей источника питания. Следовательно, разрешается проблема в том, что электродвигатель переменного тока формирует перегрузку по току и возникает чрезмерно большая пульсация крутящего момента.
При конфигурации первого варианта осуществления формируются команды управления током (команда id* управления током d-оси и команда iq* управления током q-оси), при которых коэффициент PMF модуляции совпадает с командой PMF* управления коэффициентом модуляции. Следовательно, можно уменьшать коэффициент PMF модуляции, например, до 0,95 при одновременном поддержании выходного крутящего момента электродвигателя 6 при предварительно определенном значении, понижая наведенное напряжение электродвигателя 6 и понижая выходное напряжение инвертора 2.
При конфигурации первого варианта осуществления, поскольку синхронный трехимпульсный режим, который является синхронным импульсным режимом, выбирается как импульсный режим, количества импульсов и положения импульсов, соответственно, включенных в положительный полупериод и отрицательный полупериод инвертора 2, равны, и обеспечивается положительная и отрицательная симметрия напряжения, приложенного к электродвигателю 6. Следовательно, можно препятствовать возникновению колебания тока и пульсации крутящего момента в электродвигателе 6, предотвращать возникновение шума и колебания вследствие колебания тока и пульсации крутящего момента и выполнять стабильное возбуждение электродвигателя 6.
Дополнительно, при конфигурации второго варианта осуществления, преимущество уменьшения электрического тока электродвигателя 6 является большим по сравнению с конфигурацией первого варианта осуществления, к которой не применяется второй вариант осуществления. Поскольку электрический ток электродвигателя 6 дополнительно может уменьшаться, можно дополнительно уменьшать потери инвертора 2 и электродвигателя 6.
В пояснении в вариантах осуществления целью пояснения является устройство преобразования мощности для возбуждения электродвигателя, которое управляет синхронным электродвигателем с постоянными магнитами. Тем не менее, способ управления, поясненный выше, может применяться к устройствам преобразования мощности для возбуждения электродвигателя, которые управляют так, чтобы возбуждать электродвигатели других типов.
Конфигурации, поясненные в вариантах осуществления, являются примерами содержимого настоящего изобретения. Само собой разумеется, что конфигурации могут комбинироваться с другими общеизвестными технологиями и могут изменяться, например, посредством исключения части без отступления от сущности настоящего изобретения.
Дополнительно, в этом подробном описании, главным образом, поясняется применение к устройству преобразования мощности для возбуждения электродвигателя для транспортного средства с электродвигателем. Тем не менее, область применения не ограничивается этим. Само собой разумеется, что также возможно применение к другим областям промышленного применения.
Промышленная применимость
Как пояснено выше, устройство преобразования мощности для возбуждения электродвигателя согласно настоящему изобретению полезно как изобретение, которое допускает управление подавлением для 2f-составляющей источника питания при одновременном подавлении возникновения перегрузки по току и чрезмерно большой пульсации крутящего момента в электродвигателе переменного тока.
Пояснение ссылочных обозначений
1 - конденсатор
2 - второй блок преобразования мощности (инвертор)
3, 4, 5 - датчик тока
6 - электродвигатель
7 - датчик поворота
8 - датчик напряжения
10 - блок формирования команд управления током
11 - блок формирования команд управления базисным током d-оси
14 - сумматор
15 - блок формирования команд управления током q-оси
20 - блок управления током d-оси
21 - блок вычисления развязки по q-оси
22 - блок вычисления помехозащищенности d-оси
23 - блок управления током q-оси
30 - блок вычисления коэффициентов модуляции
40 - блок вычисления управляющих фазовых углов
50 - блок формирования команд управления напряжением/сигналов широтно-импульсной модуляции
55 - блок вычисления команд управления напряжением
57 - блок формирования асинхронного многоимпульсного несущего сигнала
58 - блок формирования синхронных трехимпульсных несущих
59 - переключатель выбора
60 - процессор переключения импульсного режима
61-63 - компаратор
64-66 - инвертирующая схема
69 - блок вычисления угловых частот инвертора
70 - умножитель
71 - блок вычисления сигналов подавления пульсаций
72 - полосовой фильтр (BPF)
73 - сумматор
74 - делитель
80 - блок регулирования команд управления током
81 - блок ограничения
82 - усилитель
84 - блок вычитания
85 - блок формирования команд управления коэффициентом модуляции
90 - блок преобразования трехфазных координат в dq-оси
95 - блок вычисления опорных фазовых углов
100 - второй блок управления
150 - блок вычисления индексов амплитуды напряжения
200 - первый блок управления
210 - блок формирования команд управления напряжением постоянного тока
211 - блок управления напряжением
212 - блок управления током
213 - блок формирования сигнала широтно-импульсной модуляции
214 - датчик тока
220 - первый блок преобразования мощности (преобразователь)
230 - источник питания переменного тока
240 - таблица команд управления напряжением постоянного тока
250 - таблица команд управления коэффициентом модуляции
251 - блок вычитания
252 - блок ограничения
253 - блок пропорционального интегрирования
254 - сумматор
280 - блок управления напряжением постоянного тока
300 - устройство преобразования мощности для возбуждения электродвигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТРОЛЛЕР ЭЛЕКТРОДВИГАТЕЛЯ | 2007 |
|
RU2432663C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ | 2007 |
|
RU2419954C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2447572C2 |
| ВЕКТОРНЫЙ РЕГУЛЯТОР ДЛЯ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2006 |
|
RU2407140C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВЕКТОРОМ АСИНХРОННОГО ДВИГАТЕЛЯ, СПОСОБ УПРАВЛЕНИЯ ВЕКТОРОМ АСИНХРОННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ АСИНХРОННОГО ДВИГАТЕЛЯ | 2006 |
|
RU2392732C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2009 |
|
RU2483424C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2008 |
|
RU2410831C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2008 |
|
RU2440662C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТИ | 1998 |
|
RU2209502C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2659372C1 |







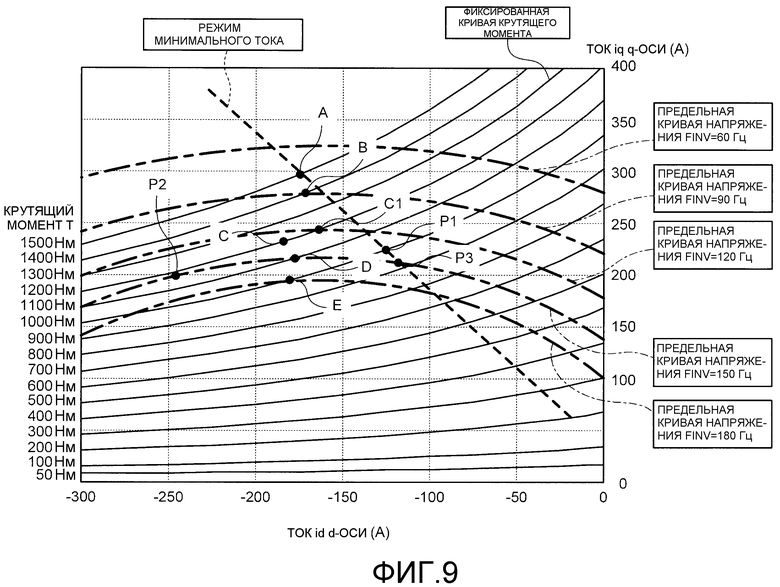

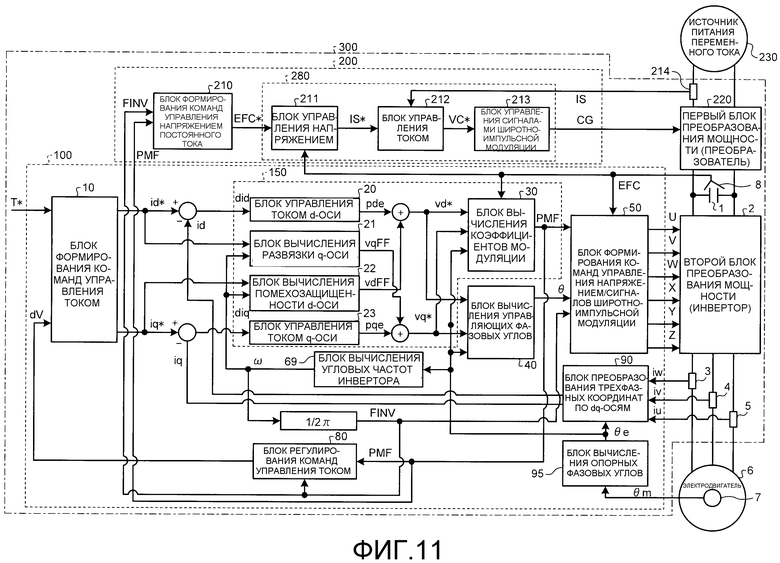


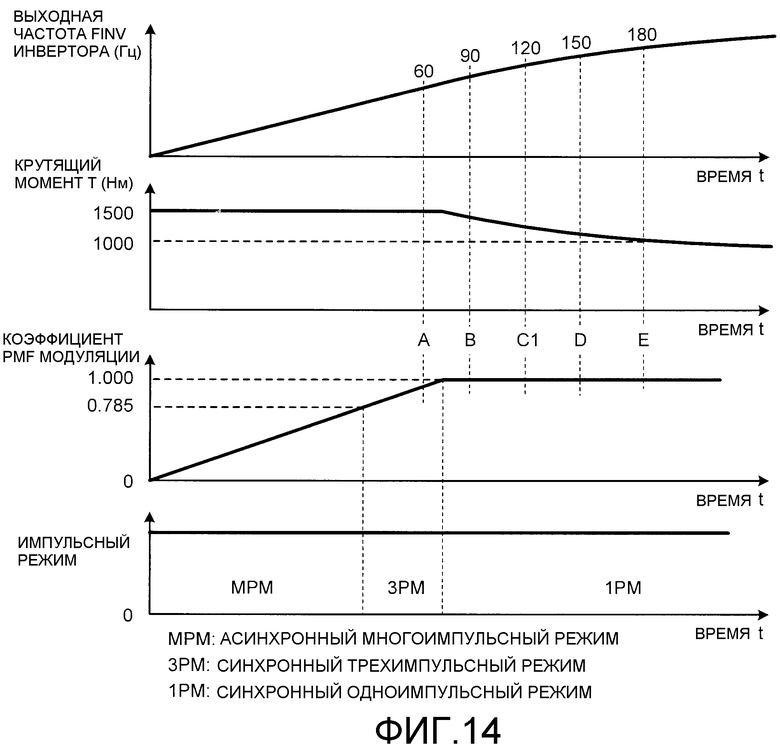
Изобретение относится к области электротехники и может быть использовано в производственных станках, бытовых приборах, в областях автомобильного транспорта, в транспортных средствах с электродвигателем и т.п. Технический результат - обеспечение подавления 2f-составляющей источника питания при одновременном подавлении формирования перегрузки по току или чрезмерно большой пульсации крутящего момента в электродвигателе переменного тока, в котором используется одноимпульсный режим. В устройстве преобразования мощности второй блок (100) управления включает в себя блок (10) формирования команд управления током, который формирует на основе команды Т* управления крутящим моментом команду управления током электродвигателя (6), блок (150) вычисления индексов амплитуды напряжения, который вычисляет на основе команды управления током индекс амплитуды напряжения (коэффициент PMF модуляции), блок (80) регулирования команд управления током, который формирует на основе коэффициента PMF модуляции и частоты FINV электродвигателя 6 величину dV регулирования команд управления током, и блок (50) формирования сигналов широтно-импульсной модуляции/команд управления напряжением, включающий в себя блок формирования сигналов подавления пульсаций, который формирует на основе напряжения EFC постоянного тока сигнал подавления пульсаций для подавления составляющей пульсации 2f-составляющей источника питания для формирования стробирующего сигнала (сигнала широтно-импульсной модуляции) в инвертор. 2 н. и 18 з.п. ф-лы, 14 ил.
1. Устройство преобразования мощности для возбуждения электродвигателя, содержащее:
первый блок (220) преобразования мощности, который подключен к источнику (230) питания переменного тока и преобразует напряжение переменного тока от источника питания переменного тока в напряжение постоянного тока;
второй блок (2) преобразования мощности, который подключен к первому блоку (220) преобразования мощности и преобразует напряжение постоянного тока в напряжение переменного тока и выводит напряжение переменного тока на электродвигатель (6) переменного тока;
первый блок (200) управления, который управляет первым блоком (220) преобразования мощности; и
второй блок управления (100), который управляет вторым блоком (2) преобразования мощности, при этом:
второй блок (100) управления включает в себя:
блок (10) формирования команд управления током, который формирует на основе, по меньшей мере, команды управления крутящим моментом команду управления током для электродвигателя переменного тока;
блок (150) вычисления индексов амплитуды напряжения, который вычисляет на основе команды управления током индекс амплитуды напряжения, который должен быть применен к электродвигателю (6) переменного тока;
блок (80) регулирования команд управления током, который формирует на основе, по меньшей мере, индекса амплитуды напряжения и частоты электродвигателя переменного тока величину регулирования команды управления током для регулирования команды управления током; и
блок (71) формирования сигналов подавления пульсаций, который формирует на основе напряжения постоянного тока сигнал (BTPMFCMP) подавления пульсаций, причем
второй блок (100) управления формирует на основе управляющего сигнала, включающего в себя команду управления током, регулируемую посредством величины (dv) регулирования команд управления током и сигнала (BTPMFCMP) подавления пульсаций, сигнал широтно-импульсной модуляции во второй блок (2) преобразования мощности и выводит сигнал широтно-импульсной модуляции.
2. Устройство по п.1, в котором второй блок (100) управления управляет, когда частота электродвигателя переменного тока находится в предварительно определенном диапазоне, напряжением, выводимым посредством второго блока преобразования мощности, равным предварительно определенному значению, меньшему максимального напряжения, которое может быть выведено в соответствии с напряжением постоянного тока.
3. Устройство по п.2, в котором второй блок (100) управления выбирает, когда управление для обеспечения совпадения крутящего момента, выдаваемого электродвигателем переменного тока, с командой управления крутящим моментом выполнено посредством блока (10) формирования команд управления током и блока (80) регулирования команд управления током, команду управления током на фиксированной линии крутящего момента на основе команды управления крутящим моментом и внутренней стороны линии предельного напряжения.
4. Устройство по п.1, в котором блок (80) регулирования команд управления током включает в себя блок (85) формирования целевых команд управления амплитудой напряжения, который формирует, на основе частоты электродвигателя переменного тока, целевую команду управления амплитудой напряжения, указывающую максимальное значение индекса амплитуды напряжения.
5. Устройство по п.4, в котором блок (80) регулирования команд управления током формирует на основе отклонения между целевой командой управления амплитудой напряжения и индексом амплитуды напряжения, величину регулирования команды управления током.
6. Устройство по п.4, в котором блок (85) формирования целевых команд управления амплитудой напряжения формирует, когда частота электродвигателя переменного тока находится в предварительно определенном диапазоне, целевую команду управления амплитудой напряжения для задания выходного напряжения второго блока (2) преобразования мощности, равным предварительно определенному значению, меньшему максимального напряжения, которое может быть выведено в соответствии с напряжением постоянного тока.
7. Устройство по п.1, в котором:
блок (10) формирования команд управления током формирует первую команду управления током d-оси, которая является током составляющей магнитного потока электродвигателя переменного тока, из команды управления крутящим моментом, регулирует первую команду управления током d-оси согласно величине регулирования команды управления током, чтобы формировать вторую команду управления током d-оси, и формирует на основе команды управления крутящим моментом и второй команды управления током d-оси первую команду управления током q-оси, которая является током составляющей крутящего момента, и
блок (150) вычисления индексов амплитуды напряжения вычисляет, на основе второй команды управления током d-оси и первой команды управления током q-оси, индекс амплитуды напряжения.
8. Устройство по п.1, в котором:
второй блок (100) управления включает в себя:
блок (60) переключения импульсного режима, который переключает импульсный режим второго блока (2) преобразования мощности; и
блок (59) выбора импульсного режима, который выбирает согласно управлению блоком (60) переключения импульсного режима, по меньшей мере, один из множества импульсных режимов, включающих в себя асинхронный импульсный режим для формирования сигнала широтно-импульсной модуляции асинхронно с частотой электродвигателя переменного тока и синхронный импульсный режим для формирования сигнала широтно-импульсной модуляции синхронно с частотой электродвигателя переменного тока, и
второй блок управления выбирает, когда частота электродвигателя переменного тока присутствует в предварительно определенном диапазоне, центрированном вокруг частоты, в два раза превышающей частоту источника питания переменного тока, синхронный импульсный режим в качестве импульсного режима.
9. Устройство по п.1, в котором:
второй блок (100) управления включает в себя:
блок (60) переключения импульсного режима, который переключает импульсный режим второго блока (2) преобразования мощности; и
блок (59) выбора импульсного режима, который выбирает согласно управлению блоком переключения импульсного режима, по меньшей мере, один из множества импульсных режимов, включающих в себя асинхронный импульсный режим для формирования сигнала широтно-импульсной модуляции асинхронно с частотой электродвигателя переменного тока и синхронный трехимпульсный режим для формирования сигнала широтно-импульсной модуляции, количество импульсов которого в полупериоде напряжения равно трем, сформированных синхронно с частотой электродвигателя переменного тока, и
второй блок (100) управления выбирает, когда частота электродвигателя переменного тока находится в предварительно определенном диапазоне, центрированном вокруг частоты, в два раза превышающей частоту источника питания переменного тока, синхронный трехимпульсный режим в качестве импульсного режима.
10. Устройство по п.8, в котором блок (59) выбора импульсного режима выбирает на основе, по меньшей мере, индекса амплитуды напряжения, не включающего в себя сигнал подавления пульсаций, импульсный режим.
11. Устройство по п.9, в котором блок (59) выбора импульсного режима выбирает на основе, по меньшей мере, индекса амплитуды напряжения, не включающего в себя сигнал подавления пульсаций, импульсный режим.
12. Устройство по п.2, в котором предварительно определенный диапазон является диапазоном, центрированным вокруг частоты, в два раза превышающей частоту источника питания переменного тока.
13. Устройство по п.2, в котором предварительно определенное значение является значением, равным или большим 90% и меньшим 100% максимального напряжения, которое может быть выведено при постоянном напряжении посредством выходного напряжения второго блока (2) преобразования мощности.
14. Устройство преобразования мощности для возбуждения электродвигателя, содержащее:
первый блок (220) преобразования мощности, который подключен к источнику (230) питания переменного тока и преобразует напряжение переменного тока от источника (6) питания переменного тока в напряжение постоянного тока;
второй блок (2) преобразования мощности, который подключен к первому блоку (220) преобразования мощности и преобразует напряжение постоянного тока в напряжение переменного тока, и выводит напряжение переменного тока к электродвигателю переменного тока;
первый блок (200) управления, который управляет первым блоком преобразования мощности; и
второй блок (100) управления, который управляет вторым блоком (2) преобразования мощности, при этом:
второй блок (100) управления включает в себя:
блок (10) формирования команд управления током, который формирует на основе, по меньшей мере, команды управления крутящим моментом команду управления током для электродвигателя (6) переменного тока; и
блок (150) вычисления индексов амплитуды напряжения, который вычисляет на основе команды управления током индекс амплитуды напряжения, который должен быть применен к электродвигателю переменного тока, и
первый блок (200) управления включает в себя:
блок (210) формирования команд управления напряжением постоянного тока, который формирует команду управления напряжением постоянного тока, которое является целевым значением напряжения постоянного тока; и
блок (280) управления напряжением, который формирует сигнал управления так, чтобы напряжение постоянного тока и команда управления напряжением постоянного тока совпадали друг с другом, и
команда управления напряжением постоянного тока, когда частота электродвигателя переменного тока находится в предварительно определенном диапазоне, формируется большей, чем команда управления напряжением постоянного тока, формируемая, когда частота электродвигателя переменного тока не находится в предварительно определенном диапазоне.
15. Устройство по п.14, в котором блок (210) формирования команд управления напряжением постоянного тока формирует на основе частоты электродвигателя переменного тока команду управления напряжением постоянного тока.
16. Устройство по п.14, в котором блок (210) формирования команд управления напряжением постоянного тока формирует на основе индекса амплитуды напряжения команду управления напряжением постоянного тока.
17. Устройство по п.14, в котором блок (210) формирования команд управления напряжением постоянного тока формирует на основе частоты электродвигателя переменного тока и индекса амплитуды напряжения команду управления напряжением постоянного тока.
18. Устройство по п.14, в котором блок (210) формирования команд управления напряжением постоянного тока формирует на основе частоты электродвигателя переменного тока целевое значение, указывающее максимум индекса амплитуды напряжения, и формирует на основе целевого значения, указывающего максимум индекса амплитуды напряжения и индекса амплитуды напряжения команду управления напряжением постоянного тока.
19. Устройство по п.14, в котором предварительно определенный диапазон является диапазоном, центрированным вокруг частоты, в два раза превышающей частоту источника питания переменного тока.
20. Устройство по п.14, в котором предварительно определенное значение является значением, равным или большим 90% и меньшим 100% максимального напряжения, которое может быть выведено при постоянном напряжении посредством выходного напряжения второго блока (2) преобразования мощности.
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1997 |
|
RU2193814C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЗАПОРНОЙ АРМАТУРЫ | 2006 |
|
RU2314450C1 |
| JP 2001238490 A, 31.08.2001 | |||
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ПАРАМЕТРОВ ФЕРРОМАГНИТНЫХ МАТЕРИАЛОВ | 0 |
|
SU408244A1 |
| JP 200694646 A, 06.04.2006 | |||
| JP 10323055 A, 04.12.1996 | |||
| Способ сооружения опускной крепи в тиксотропной рубашке | 1988 |
|
SU1553693A1 |
| WO 2008026249 A1, 06.03.2008. | |||

