Область техники
Настоящее изобретение относится к устройству преобразования электрической энергии, которое преобразует энергию постоянного тока в энергию переменного тока с изменяемой частотой и/или измененяемым напряжением, в частности к устройству преобразования электрической энергии, которое включает в себя преобразователь и инвертор, в который напряжение постоянного тока, выводимое из преобразователя, вводится так, чтобы преобразовываться в переменные напряжения с изменяемой частотой и/или измененяемым напряжением.
Предшествующий уровень техники
В традиционном устройстве преобразования электрической энергии для электрического железнодорожного вагона, преобразователь соединяется с однофазным источником питания переменного тока между линией питания и рельсом/рельсами в качестве ввода на стороне переменного тока посредством токоприемника и трансформатора и т.п. и выполняет преобразование переменного тока в постоянный, чтобы получать заранее определенное напряжение постоянного тока. Конденсатор предусмотрен на стороне постоянного тока преобразователя для сглаживания его напряжения. Энергия постоянного тока, накопленная в конденсаторе, преобразуется в энергию переменного тока с изменяемой частотой и/или изменяемым напряжением посредством инвертора. Вращающаяся машина переменного тока, такая как асинхронный электродвигатель, приводится в действие посредством энергии переменного тока, которую выводит инвертор. Помимо этого напряжение конденсатора, а именно входное напряжение постоянного тока для инвертора, детектируется посредством детектора напряжения. На выходной стороне переменного тока инвертора предусмотрен детектор тока.
Напряжение конденсатора пульсирует на двойной частоте (частота упоминается как "частота пульсации") от частоты источника питания переменного тока. Известно, что если ответные меры не принимаются в случае, когда частота (называемая "выходной частотой") энергии переменного тока, которую выводит инвертор, находится близко к частоте пульсации, энергия переменного тока, которую выводит инвертор, и, следовательно, крутящий момент, формируемый посредством электродвигателя, варьируется на частоте разности между частотой пульсации и выходной частотой. Такое варьирование упоминается как "явление биения". Явление биения возникает, когда возникает разность энергии между положительным полупериодом и отрицательным полупериодом энергии переменного тока вследствие варьирования напряжения постоянного тока. Чтобы исключить или ограничить явление биения, выполняется управление, в котором выделяется только составляющая пульсации с использованием полосового фильтра и т.п. из входного напряжения постоянного тока для инвертора, детектируемого посредством детектора напряжения, и в один период частоты пульсации выходная частота инвертора варьируется относительно абсолютной величины составляющей пульсации. (см., например, патентный документ 1).
Патентный документ 1. Патент (Япония) номер H07-46918 (фиг.1, пункт 1)
В традиционном устройстве преобразования электрической энергии управляющий микропроцессор выполняет управление для исключения или ограничения явления биения. Следовательно, возникает задержка на управление, поскольку требуется время для вычислений в управляющем микропроцессоре. Возникает случай, когда задержка на управление возрастает в зависимости от времени для вычислений управляющего микропроцессора, и в частоту пульсации вводится задержка по фазе, так что невозможно получать результат достаточного уменьшения пульсации тока и пульсации крутящего момента. Следовательно, возникает проблема в том, что недорогой управляющий микропроцессор не может быть использован.
Например, когда время для вычислений управляющего микропроцессора составляет 500 микросекунд, если частота источника питания переменного тока составляет 50 Гц, задержка P по фазе (градусов) в частоте пульсации задается посредством следующего уравнения:
P=500 (микросекунд)×2×50(Гц)×360 (градусов)=18,0 (градусов)
Если частота источника питания переменного тока составляет 60 Гц, следующее уравнение задается:
P=500 (микросекунд)×2×60(Гц)×360 (градусов)=21,6 (градусов)
Следует понимать, что задержка P по фазе в ответ на одну и ту же задержку на управление отличается в зависимости от частот источника питания переменного тока. Следует понимать, что чем больше время для вычислений управляющего микропроцессора, тем больше задержка по фазе. Следовательно, время для вычислений возрастает для такого недорогого управляющего микропроцессора, так что задержка по фазе возрастает, что приводит к снижению результата уменьшения пульсации тока и пульсации крутящего момента.
Кроме того, в электрическом железнодорожном составе, в котором меняется частота источника питания переменного тока (например, между 50 Гц и 60 Гц), когда железнодорожный состав движется, возникает проблема в том, что для способа детектирования составляющей пульсации посредством полосового фильтра требуется предоставление множества полосовых фильтров, и затем их переключение выполняется в зависимости от частот источника питания, так что трудно принимать ответные меры.
Краткое изложение существа изобретения
Настоящее изобретение направлено на разрешение этих вышеописанных традиционных проблем, и задача изобретения заключается в том, чтобы создать устройство преобразования электрической энергии, которое способно компенсировать задержки, существующие в механизме детектирования и системе управления, вне зависимости от частоты пульсации напряжения постоянного тока и ограничения варьирования энергии переменного тока, которая выводится из устройства преобразования электрической энергии.
Устройство преобразования электрической энергии согласно настоящему изобретению содержит преобразователь для преобразования энергии переменного тока в энергию постоянного тока; конденсатор, соединенный параллельно с преобразователем на стороне постоянного тока; модуль измерений напряжения постоянного тока для измерения напряжения на конденсаторе; инвертор, соединенный параллельно с конденсатором, для преобразования энергии постоянного тока в энергию переменного тока произвольной частоты; и устройство управления, в которое значения напряжения постоянного тока, каждое из которых измеряется посредством модуля измерений напряжения постоянного тока, вводятся в заранее определенный период дискретизации для управления инвертором, при этом устройство управления включает в себя модуль управления напряжением для управления амплитудой напряжения энергии переменного тока, которую выводит инвертор; модуль управления частотой для управления частотой энергии переменного тока, которую выводит инвертор; запоминающее устройство значений напряжения постоянного тока для сохранения значений напряжения постоянного тока за заранее определенные моменты времени дискретизации до последнего; модуль оценки значений напряжения постоянного тока для прогнозирования значения оценки напряжения постоянного тока в заранее определенное время после последнего момента времени дискретизации с использованием значений напряжения постоянного тока, сохраненных в запоминающем устройстве значений напряжения постоянного тока; и модуль подавления биений, в который значение оценки напряжения постоянного тока, прогнозируемое посредством модуля оценки значений напряжения постоянного тока, вводится для управления одним или обоими из модуля управления напряжением и модуля управления частотой таким образом, чтобы ограничивать варьирование энергии переменного тока, которую выводит инвертор, вследствие пульсации, вызываемой на стороне постоянного тока инвертора.
Устройство преобразования электрической энергии согласно настоящему изобретению содержит преобразователь для преобразования энергии переменного тока в энергию постоянного тока; конденсатор, соединенный параллельно с преобразователем на стороне постоянного тока; модуль измерений напряжения постоянного тока для измерения напряжения на конденсаторе; инвертор, соединенный параллельно с конденсатором, для преобразования энергии постоянного тока в энергия переменного тока произвольной частоты; и устройство управления, в которое значения напряжения постоянного тока, каждое из которых измеряется посредством модуля измерений напряжения постоянного тока, вводятся в заранее определенный период дискретизации для управления инвертором, при этом устройство управления включает в себя модуль управления напряжением для управления амплитудой напряжения энергии переменного тока, которую выводит инвертор; модуль управления частотой для управления частотой энергии переменного тока, которую выводит инвертор; запоминающее устройство значений напряжения постоянного тока для сохранения значений напряжения постоянного тока за заранее определенные моменты времени дискретизации до последнего; модуль оценки значений напряжения постоянного тока для прогнозирования значения оценки напряжения постоянного тока в заранее определенное время после последнего момента времени дискретизации с использованием значений напряжения постоянного тока, сохраненных в запоминающем устройстве значений напряжения постоянного тока; и модуль подавления биений, в который значение оценки напряжения постоянного тока, прогнозируемое посредством модуля оценки значений напряжения постоянного тока, вводится для управления одним или обоими из модуля управления напряжением и модуля управления частотой таким образом, чтобы ограничивать варьирование энергии переменного тока, которую выводит инвертор, вследствие пульсации, вызываемой на стороне постоянного тока инвертора, так что обеспечивается такой результат, что можно компенсировать задержки, существующие в механизме детектирования и системе управления, вне зависимости от частоты пульсации напряжения постоянного тока и ограничивать варьирование энергии переменного тока, которая выводится из устройства преобразования электрической энергии.
Краткое описание чертежей
В дальнейшем предпочтительные варианты воплощения изобретения поясняются со ссылками на сопроводительные чертежи, на которых:
фиг.1 изображает блок-схему, иллюстрирующую пример конфигурации устройства преобразования электрической энергии согласно первому варианту осуществления настоящего изобретения;
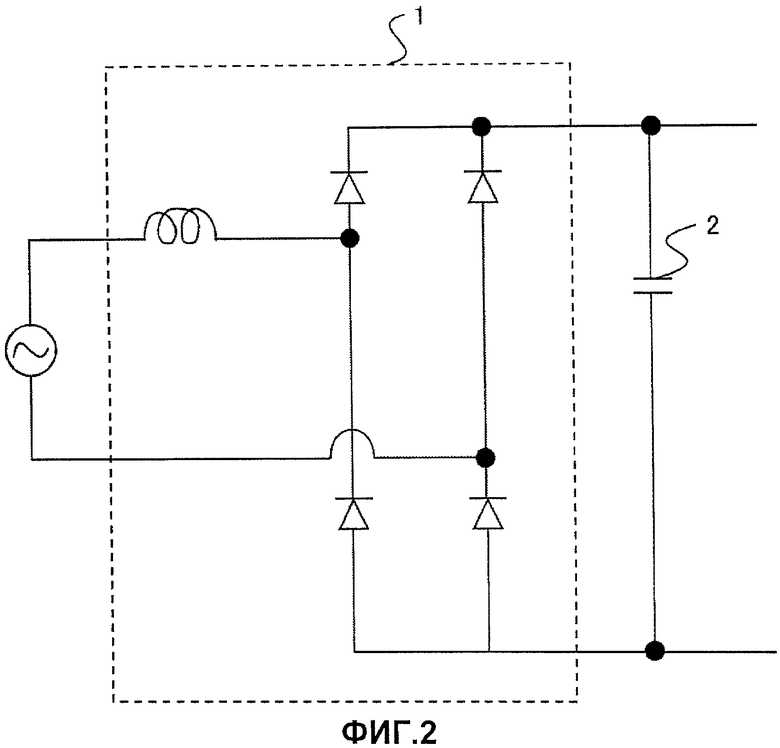
фиг.2 изображает схему для пояснения конфигурации преобразователя в устройстве преобразования электрической энергии согласно первому варианту осуществления настоящего изобретения;
фиг.3 изображает диаграмму для пояснения принципа оценки напряжения согласно первому варианту осуществления настоящего изобретения;
фиг.4 изображает диаграмму, иллюстрирующую значения оценки напряжения, которые модуль оценки значений напряжения постоянного тока прогнозирует для следующего момента времени дискретизации, когда период дискретизации задается равным 250 микросекунд в устройстве преобразования электрической энергии согласно первому варианту осуществления настоящего изобретения;
фиг.5 включает в себя диаграммы для пояснения варьирований крутящего момента вращающейся машины переменного тока в устройстве преобразования электрической энергии согласно варианту осуществления 1 настоящего изобретения в случаях, когда управление для ограничения явления биения, выполняется, и когда оно не выполняется: Фиг.5(A) - это случай, когда управление посредством настоящего изобретения выполняется, а фиг.5(B) - это случай, когда управление посредством настоящего изобретения не выполняется;
фиг.6 изображает блок-схему, иллюстрирующую пример конфигурации другого устройства преобразования электрической энергии согласно второму варианту осуществления настоящего изобретения;
фиг.7 изображает блок-схему, иллюстрирующую пример конфигурации другого устройства преобразования электрической энергии согласно третьему варианту осуществления настоящего изобретения;
Фиг.8 изображает блок-схему, иллюстрирующую пример конфигурации другого устройства преобразования электрической энергии согласно четвертому варианту осуществления настоящего изобретения;
фиг.9 изображает блок-схему, иллюстрирующую пример конфигурации другого устройства преобразования электрической энергии согласно пятому варианту осуществления настоящего изобретения;
фиг.10 изображает блок-схему, иллюстрирующую пример конфигурации другого устройства преобразования электрической энергии согласно шестому варианту осуществления настоящего изобретения; и
фиг.11 изображает диаграмму для пояснения принципа оценки напряжения согласно шестому варианту осуществления настоящего изобретения.
Описание предпочтительных вариантов осуществления изобретения
Первый вариант осуществления
На фиг.1 показана блок-схема примера конфигурации устройства преобразования электрической энергии согласно варианту осуществления 1 настоящего изобретения. На фиг.1, устройство преобразования электрической энергии включает в себя преобразователь 1 для преобразования энергии переменного тока от источника питания переменного тока в энергию постоянного тока посредством выпрямления энергии переменного тока, конденсатор 2, соединенный параллельно с преобразователем 1 на стороне постоянного тока для сглаживания пульсации вследствие выпрямления, и инвертор 3 для преобразования энергии постоянного тока, накопленной на конденсаторе 2, в энергию переменного тока произвольной частоты при произвольных напряжениях. Асинхронная машина, которая является вращающейся машиной 4 переменного тока, соединяется с инвертором 3 на стороне переменного тока. Устройство 5 управления управляет инвертором 3 так, что инвертор 3 выводит амплитуды напряжения и частоту, полученные из заданных значений для крутящего момента, который должен выводиться из вращающейся машины 4 переменного тока, и для его угловой частоты вращения. Следует отметить, что аналогичные результаты могут предполагаться с использованием либо асинхронной машины, либо синхронной машины в качестве вращающейся машины 4 переменного тока, приводимой в действие посредством устройства преобразования электрической энергии по настоящему изобретению.
Схема, показанная на фиг.2, предназначена для пояснения конфигурации преобразователя 1. На фиг.2 показана схема однофазного диодного выпрямителя. Преобразователь мостовой схемы с использованием переключающих элементов, таких как IGBT, также может быть использован. Вместо однофазного для преобразователя также может быть использован источник питания трехфазного переменного тока. Так как преобразователь может преобразовывать энергию переменного тока из источника питания переменного тока в энергию постоянного тока, то может быть использован любой вид преобразователя.
Инвертор 3 выполняет операцию широтно-импульсной модуляции (ШИМ) и выводит напряжения переменного тока, получаемые посредством выполнения векторного управления так, чтобы управлять вращающейся машиной 4 переменного тока, чтобы удовлетворять заданным значениям для ее магнитного потока вторичной обмотки, крутящего момента и угловой частоты вращения. Следует отметить, что настоящее изобретение применимо к случаю, в котором векторное управление не выполняется.
Устройство 5 управления выполняет дискретное управление временем, и ему предоставляется в заранее определенный период дискретизации значение измерения напряжения постоянного тока, которое является напряжением на конденсаторе 2, измеряемым посредством модуля 6 определения напряжения, который является модулем измерений напряжения постоянного тока, и угловая частота вращения, измеряемая посредством датчика 7 вращения. Контрольные значения, определенные на основе последнего значения дискретизации, используются для следующего момента времени дискретизации.
Устройство 5 управления включает в себя запоминающее устройство 51 значений напряжения постоянного тока для сохранения значений измерения напряжения в заранее определенные моменты времени дискретизации (три момента в данном случае) до последнего; модуль 52 оценки значений напряжения постоянного тока для прогнозирования напряжения на конденсаторе 2 после заранее определенного времени (здесь, один период дискретизации) от последнего момента времени дискретизации с использованием полиномиальной аппроксимации на основе значений измерения напряжения в заранее определенные моменты времени дискретизации (три момента в данном случае) до последнего; модуль 53 извлечения биений, в который значения оценки напряжения постоянного тока, прогнозируемые посредством модуля 52 оценки значений напряжения постоянного тока, последовательно вводятся для извлечения составляющей Vbeat пульсации; модуль 54 вычислений контрольных значений угловой частоты, который является модулем подавления биений, для вывода контрольного значения ωbeat угловой частоты, в котором составляющая Vbeat пульсации, извлекаемая посредством модуля 53 извлечения биений, умножается на заранее определенный коэффициент; модуль 55 управления частотой, в который вводится контрольное значение ωbeat угловой частоты, для управления частотой выходных напряжений инвертора 3; модуль 56 управления напряжением для управления амплитудами выходного напряжения инвертора 3; и модуль 57 формирования импульсов, в который вводятся сигналы из модуля 55 управления частотой и модуля 56 управления напряжением, для вывода стробирующих импульсов, чтобы управлять переключающими элементами, которые включает в себя инвертор 3.
Далее поясняются операции. В модуле 52 оценки значений напряжения постоянного тока прогнозируется значение напряжения постоянного тока для следующего момента времени дискретизации посредством экстраполяции полинома аппроксимации второго порядка, полученного из значений измерения напряжения постоянного тока на три момента времени дискретизации ранее от последнего.
Чтобы получить уравнение, которое прогнозирует значение напряжения постоянного тока в следующем моменте времени дискретизации, задаются следующие переменные.
T: период дискретизации;
tn: последний момент времени дискретизации;
tn-m: момент времени дискретизации за m моментов до последнего (=tn-m×T);
tn+1: следующий момент времени дискретизации после последнего;
Vn: значение измерения напряжения в последний момент времени дискретизации;
Vn-m: значение измерения напряжения в момент времени дискретизации за m моментов до последнего;
En+1: значение оценки напряжения для следующего момента времени дискретизации после последнего.
Диаграмма, показанная на фиг.3, предназначена для пояснения принципа оценки напряжения согласно варианту осуществления 1 настоящего изобретения. На основе трех значений Vn и Vn-1 и Vn-2 измерения напряжения до последнего получается полином, который выражает напряжения, указываемые посредством сплошной кривой, как функцию от времени. Посредством введения времени для следующего момента времени дискретизации в полученный полином, для следующего момента времени дискретизации вычисляется значение En+1 оценки напряжения.
Что касается переменной tn в качестве момента начала отсчета времени, полином аппроксимации второго порядка для значения напряжения постоянного тока предполагается следующим образом:

Посредством подстановки значений измерения напряжения три момента времени дискретизации до последнего в уравнение (1) задаются следующие уравнения:
Помимо этого, посредством вычисления значения En+1 оценки напряжения для следующего момента времени дискретизации из уравнения (1) задается следующее уравнение:

Посредством вычитания уравнения (3) из уравнения (5) задается следующее уравнение:

Посредством суммирования уравнения (5) с уравнением (3) задается следующее уравнение:

Поскольку правая сторона уравнения, в которой сумма уравнения (6) и утроенного уравнения (2) вычитается из удвоенного уравнения (7), становится равной правой стороне уравнения (4), имеет место следующее уравнение:

Посредством решения уравнения (8) для En+1 задается следующее уравнение:

Уравнение (9) является уравнением, которое вычисляет значение оценки напряжения для следующего момента времени дискретизации посредством экстраполяции с использованием полинома аппроксимации второго порядка, полученного из значений измерения напряжения за три момента времени дискретизации до последнего. Без вычисления коэффициентов a, b и c полинома аппроксимации второго порядка можно получать посредством простого вычисления значение оценки напряжения для следующего момента времени дискретизации на основе значений измерения напряжения за три момента времени дискретизации до последнего, так что вычисление может осуществляться с достаточной чувствительностью с использованием управляющего микропроцессора, который не имеет значительных вычислительных мощностей.
На фиг.4 проиллюстрированы значения оценки напряжения, каждое из которых модуль 52 оценки значений напряжения постоянного тока прогнозирует для следующего момента времени дискретизации, когда период "T" дискретизации задается равным 250 микросекунд. Значения оценки напряжения для соответствующих следующих моментов времени дискретизации указываются посредством сплошной линии, которая изменяется в лестничной конфигурации для каждого "T". Помимо этого значения измерения напряжения, каждое из которых находится в последние моменты времени дискретизации, получают с задержкой в один период дискретизации "T", указаны совместно. Значения напряжения постоянного тока, полученные посредством полиномов аппроксимации второго порядка, которые отличаются друг от друга в течение соответствующих интервалов времени, указаны сплошной кривой. Следует понимать из значений оценки напряжения для соответствующих следующих моментов времени дискретизации, что постоянные напряжения могут быть приблизительно спрогнозированы с хорошей точностью. Следует отметить, что заранее определенное вычисление выполняется в одном периоде дискретизации, и управление выполняется для каждого периода дискретизации, так что управление задерживается на один период дискретизации в случае, если управление для прогнозирующей оценки не выполняется для следующего момента времени дискретизации.
Следует отметить, что можно выполнить аппроксимацию с использованием полинома третьего порядка или выше. Подробности получения опускаются и следующее уравнение используется, когда значение напряжения постоянного тока прогнозируется для следующего момента времени дискретизации посредством экстраполяции полинома аппроксимации третьего порядка на основе значений измерения напряжения за четыре момента времени дискретизации до последнего.

Аналогично, задают следующее уравнение, когда используется полином аппроксимации четвертого порядка.

При оценке напряжения постоянного тока с использованием полиномиальной аппроксимации уравнений (9)-(11) для определения коэффициентов полиномиальной аппроксимации используется минимальное требуемое число значений измерения напряжения постоянного тока. Поскольку шум и т.п. включен в значения измерения напряжения постоянного тока, то для предотвращения влияния, вызываемого посредством такого шума в максимально возможной степени при оценке напряжения, может быть получена полиномиальная аппроксимация, чтобы использоваться для оценки, посредством увеличения числа значений измерения напряжения постоянного тока так, чтобы минимизировать квадратичные ошибки. Помимо этого постоянное напряжение может прогнозироваться для следующего момента времени дискретизации с использованием полиномиальной аппроксимации, которую получают с заранее определенными временами периодов дискретизации (например, два периода), в качестве единицы. Например, когда такая оценка с использованием полинома аппроксимации второго порядка выполняется с двумя периодами дискретизации в качестве единицы, задается следующее уравнение:

Кроме того, устройство может быть сконфигурировано так, что постоянное напряжение прогнозируется для следующего момента времени дискретизации на основе значений измерения напряжения постоянного тока в последний момент времени дискретизации, момент времени дискретизации на один период ранее и момент времени дискретизации на три периода ранее. Оценка может выполняться с использованием приближенного выражения, отличного от полиномов. Значение напряжения постоянного тока может прогнозироваться для момента времени дискретизации, такого как два периода после или 1,5 периода после момента времени. Модуль оценки значений напряжения постоянного тока может быть любым видом модуля, если он может прогнозировать значение напряжения постоянного тока в заранее определенное время после последнего момента времени дискретизации посредством сохранения значений измерения напряжения постоянного тока за заранее определенные моменты времени дискретизации до последнего и посредством использования всех или части сохраненных значений измерения напряжения постоянного тока.
Значение оценки напряжения En+1, прогнозируемое посредством модуля 52 оценки значений напряжения постоянного тока для следующего момента времени дискретизации, вводится в модуль 53 определения биений напряжения, так что получают составляющую Vbeat пульсации. Модуль 53 определения биений напряжения имеет фильтр задержки первого порядка с заранее определенной временной постоянной (называемой T1) и получает, в качестве составляющей пульсации, составляющую, в которой вывод фильтра задержки первого порядка подставляется из значения оценки напряжения. А именно, задается следующее уравнение, где параметр "s" означает оператор дифференциирования:

Постоянная 71 времени фильтра задержки первого порядка задается, по меньшей мере, в десять больше периода T дискретизации, предпочтительно, равной значению, по меньшей мере, в 100 раз больше его. Когда T=250 микросекунд, например, подходящим является то, что T1=0,0025 секунды или более, предпочтительно, T1=0,025 секунды или более.
В модуле 54 вычислений контрольных значений угловой частоты, контрольное значение ωbeat угловой частоты вычисляется посредством следующего уравнения с использованием заранее определенного коэффициента (=K), которое надлежащим образом определяется так, что частота напряжений переменного тока, которые выводит инвертор 3, уменьшается, когда составляющая Vbeat пульсации возрастает, и частота возрастает, когда составляющая Vbeat пульсации уменьшается.

Когда асинхронная машина подвергается векторному управлению, напряжения и токи в системе координат d-q, которая вращается синхронно с вращающимся магнитным потоком, определяются следующим образом. d-ось - это ось, которая совпадает с ориентацией магнитного потока вторичной обмотки, q-ось - это ось, которая является перпендикулярной d-оси. Векторное управление является аналогичным традиционно выполняемому управлению, так что поясняются только его общие черты.
В качестве переменных, которые обозначают напряжение, ток и т.п., задаются следующие переменные:
ωs*: заданное значение угловой частоты скольжения;
w: угловая частота вращения вращающейся машины 4 переменного тока, измеряемая посредством датчика 7 вращения;
ωinv: угловая частота напряжений переменного тока, которые выводит инвертор 3;
θ: фаза по d-оси в фиксированной системе координат;
Vd*: заданное значение напряжения по d-оси, которое должно выводиться из инвертора 3;
Vq*: заданное значение напряжения по q-оси, которое должно выводиться из инвертора 3;
Id*: заданное значение тока по d-оси, которое должно выводиться из инвертора 3, пропорциональное заданному значению магнитного потока вторичной обмотки;
Iq*: заданное значение тока по q-оси, которое должно выводиться из инвертора 3, пропорциональное заданному значению крутящего момента.
Помимо этого следующие параметры задаются как машинные постоянные асинхронной машины:
Rs: значение сопротивления первичной обмотки асинхронной машины;
Rr: значение сопротивления вторичной обмотки асинхронной машины;
Ls: значение индуктивности первичной обмотки асинхронной машины;
Lr: значение индуктивности вторичной обмотки мозаичной асинхронной машины;
M: взаимоиндуктивность асинхронной машины;
σ: коэффициент рассеяния асинхронной машины, σ=1-(M2/(Ls×Lr)).
В векторном управлении заданное значение ωs* угловой частоты скольжения для асинхронной машины задается следующим образом:

Угловая частота ωinv напряжений переменного тока, которые выводит инвертор 3, задается посредством следующего уравнения. Следует отметить, что член ωbeat опускается, когда нет задачи ограничивать явление биения.

Уравнение (14) и уравнение (16) означают, что угловая частота ωinv напряжений переменного тока, которые выводит инвертор 3, возрастает, когда напряжение Vbeat составляющей пульсации возрастает, и угловая частота ωinv уменьшается, когда напряжение Vbeat уменьшается. Согласно управлению, как описано выше, разность энергии уменьшается между положительным полупериодом и отрицательным полупериодом энергии переменного тока, так что явление биения может быть ограничено.
Посредством интегрирования угловой частоты ωinv, фаза θ по d-оси вычисляется посредством следующего уравнения:

Напряжения по d-оси и q-оси задаются посредством следующих уравнений:

Контрольное значение ωbeat угловой частоты вводится в модуль 55 управления частотой, так что вычисляются уравнения (15)-(17). Модуль 56 управления напряжением вычисляет уравнение (18) и уравнение (19). Фаза по d-оси 6 и заданные значения напряжений Vd* и Vq* по d-оси и q-оси вводятся в модуль 57 формирования импульсов, который формирует стробирующие импульсы, которые должны подаваться на затворы переключающих элементов, так что переменные напряжения, которые выводит инвертор 3, совпадают с этими заданными значениями.
Когда управление выполняется для того, чтобы ограничивать это явление биения, его результат подтверждается посредством моделирования. На фиг.5, диаграммы предназначены для пояснения варьирований крутящего момента вращающейся машины переменного тока в устройстве преобразования электрической энергии согласно варианту осуществления 1 в случаях, когда выполняется управление для ограничения явления биения, и когда оно не выполняется. Фиг.5(A) - это случай, когда управление согласно настоящему изобретению выполняется, а фиг.5(B) - это случай, когда управление согласно настоящему изобретению не выполняется. Из фиг.5 можно понимать, что явление биения подавляется с использованием настоящего изобретения.
Условия моделирования следующие: мощность асинхронной машины для электрического железнодорожного состава составляет 200 кВт; максимальный крутящий момент - 2000 Нм, среднее значение напряжения постоянного тока - 1500 В; амплитуда составляющей пульсации - 30 В при условии, что составляющая пульсации составляет два процента; и частота источника питания переменного тока - 60 Гц, что приводит к тому, что частота составляющей пульсации становится равной 120 Гц.
Как описано выше, значение напряжения постоянного тока прогнозируется для следующего момента времени дискретизации, и управление выполняется на основе прогнозируемого значения напряжения постоянного тока, так что обеспечивается результат, при котором управление для ограничения явления биения может выполняться без задержки вследствие определения составляющей пульсации и обработки ее вычисления. Помимо этого не используется полосовой фильтр, так что достигается такой же результат, и устройство может быть легко адаптировано также для случая, в котором частота источника питания изменяется.
Хотя модуль подавления биений управляет модулем управления частотой, чтобы ограничивать явление биения, модуль подавления биений может управлять модулем управления напряжением. Хотя конфигурация может усложняться, можно выполнить конфигурацию, в которой модуль подавления биений управляет как модулем управления частотой, так и модулем управления напряжением.
Вышеприведенные описания являются справедливыми также и для других вариантов осуществления.
Второй вариант осуществления
Возможен случай, когда шум при переключении, формируемый посредством переключающих элементов, которые имеет преобразователь 1 и инвертор 3, включается в напряжение в конденсаторе 2, измеряемое посредством модуля 6 детектирования напряжения. Также возможен случай, когда включается шум, отличный от шума при переключении. Вариант осуществления 2 - это случай, когда высокочастотные составляющие, которые могут быть определены в качестве шума, удаляются из напряжения, которое затем сохраняется как значение измерения напряжения постоянного тока. Схема, показанная на фиг.6, предназначена для пояснения конфигурации другого устройства преобразования электрической энергии согласно варианту осуществления 2.
Поясняются только отличия от фиг.1, которая изображает первый вариант осуществления. Вывод из модуля 6 детектирования напряжения вводится в устройство 5 управления через фильтр 8. Фильтр 8 является фильтром задержки первого порядка с постоянной T2 времени. Частота, которая является обратным числом от постоянной T2 времени, задается ниже порядка частоты переключения (здесь, 1000 Гц) инвертора 3 и, в достаточной степени, выше частоты составляющей пульсации напряжения постоянного тока, так что составляющая пульсации также может вводиться в устройство 5 управления. Вместо фильтра задержки первого порядка может использоваться фильтр удаления высоких частот. Фильтр любого вида может использоваться, если он позволяет удалять сигнал, частота которого, в достаточной степени, выше частоты составляющей пульсации напряжения постоянного тока.
Во втором варианте осуществления операции также являются аналогичными способу в первом варианте осуществления. Значение напряжения постоянного тока прогнозируется для следующего момента времени дискретизации, и управление выполняется на основе прогнозируемого значения напряжения постоянного тока, так что обеспечивается результат, при котором управление для ограничения явления биения может выполняться без задержки вследствие определения составляющей пульсации и обработки ее вычисления. Помимо этого не используется полосовой фильтр, так что достигается такой результат, и устройство может быть легко адаптировано также для случая, в котором частота источника питания изменяется. Кроме того, поскольку оценка выполняется на основе значений измерения напряжения постоянного тока, в котором шум, вызываемый посредством переключения и т.п., удаляется, точность оценки для напряжения постоянного тока также повышается.
Вышеприведенные описания являются справедливыми также и для других вариантов осуществления.
Третий вариант осуществления
Третий вариант осуществления - это случай, когда модуль подавления биений управляет модулем управления напряжением, чтобы ограничивать явление биения. Схема, показанная на фиг.7, предназначена для пояснения конфигурации другого устройства преобразования электрической энергии согласно варианту осуществления 3.
Поясняются только отличия от фиг.1, которая изображает первый вариант осуществления. Опускаются модуль 53 извлечения биений и модуль 54 вычислений контрольных значений угловой частоты и добавляется модуль 58 вычислений коэффициентов модуляции, который является модулем подавления биений. Модуль 58 вычислений коэффициентов модуляции вычисляет коэффициент модуляции так, что коэффициент является обратно пропорциональным значению оценки напряжения
En+1, оцененному для следующего момента времени дискретизации посредством модуля 52 оценки значений напряжения постоянного тока. Коэффициент модуляции, вычисляемый посредством модуля 58 вычислений коэффициентов модуляции, вводится в модуль 56A управления напряжением.
Далее поясняются операции. Модуль 52 оценки значений напряжения постоянного тока прогнозирует значение оценки напряжения En+1 для следующего момента времени дискретизации с использованием уравнения (9). Заданное значение ωs* угловой частоты скольжения асинхронной машины задается посредством уравнения (15).
Угловая частота ωinv напряжений переменного тока, которые выводит инвертор 3, задается посредством следующего уравнения:

Фаза θ по d-оси вычисляется посредством уравнения (17). Напряжения по d-оси и q-оси вычисляются посредством уравнений (18)-(19).
В модуле 58 вычислений коэффициентов модуляции коэффициент PMF модуляции вычисляется с использованием следующего уравнения:

Когда коэффициент PMF модуляции вычисляется с использованием уравнения (21), чем больше значение En+1 оценки напряжения постоянного тока, тем меньше становится коэффициент PMF модуляции, тогда как чем меньше значение En+1 оценки напряжения постоянного тока, тем больше становится коэффициент PMF модуляции энергии. Когда значение оценки напряжения постоянного тока варьируется (энергия переменного тока, формируемая посредством инвертора, в теории вообще не варьируется) и даже если она варьируется, абсолютная величина варьирования уменьшается. Следовательно, явление биения может ограничиваться.
Векторы (Vd*, Vq*) заданных значений напряжения умножаются на коэффициент PMF модуляции, так что следующие заданные значения трехфазного напряжения (Vu*, Nn*, Vw*) задаются:
Здесь переменная θv является фазой векторов заданных значений напряжения, приводя к небольшой погрешности относительно d-оси, и может вычисляться посредством следующего уравнения:

Модуль 57 формирования импульсов формирует стробирующие импульсы, подаваемые на затворы переключающих элементов, так что напряжения трехфазного переменного тока, которые выводит инвертор 3, совпадают с заданными значениями (Vu*, Nn*, Vw*) трехфазного напряжения, выраженными посредством уравнений (22)-(24), соответственно.
Также в случае, если модуль подавления биений управляет модулем управления напряжением, значение напряжения постоянного тока прогнозируется для следующего момента времени дискретизации, и управление выполняется на основе прогнозируемого значения напряжения постоянного тока, так что обеспечивается такой результат, что управление для ограничения явления биения может выполняться без задержки вследствие определения составляющей пульсации и обработки ее вычисления. Помимо этого полосовой фильтр не используется, так что достигается такой результат, что устройство может быть легко адаптировано также для случая, в котором частота источника питания изменяется. Кроме того, поскольку модуль извлечения биений не требуется, конфигурация устройства управления упрощается.
Четвертый вариант осуществления
Четвертый вариант осуществления - это случай, когда модуль подавления биений управляет модулем управления напряжением так, чтобы ограничивать явление биения в схеме управления постоянством отношения напряжения/частоты, в которой отношение напряжения к его частоте сохраняется постоянным. Схема, показанная на фиг.8, предназначена для пояснения конфигурации другого устройства преобразования электрической энергии согласно четвертому варианту осуществления.
Устройство 5 управления включает в себя запоминающее устройство 51 значений напряжения постоянного тока и модуль 52 оценки значений напряжения постоянного тока, описанные выше; модуль 59 преобразования фазного напряжения для преобразования значения оценки напряжения постоянного тока, прогнозируемого посредством модуля 52 оценки значений напряжения постоянного тока, в фазное напряжение; модуль 5A преобразования обратных чисел для вычисления обратного числа фазного напряжения, выводимого из модуля 59 преобразования фазного напряжения; модуль 5B задания заданных значений угловой частоты для задания заданного значения угловой частоты; модуль 5C вычислений выходного напряжения для определения выходного напряжения из заданного значения частоты; модуль 56B управления напряжением для задания, в качестве амплитуд напряжения, произведений, формируемых посредством умножения вывода из модуля 5A преобразования обратных чисел на напряжение, которое выводит модуль 5C вычислений выходного напряжения; и модуль 57A формирования импульсов, в который вводятся выходные сигналы из модуля 56B управления напряжением и модуля 5B задания заданных значений угловой частоты, для вывода стробирующих импульсов, чтобы управлять переключающими элементами, которые имеет инвертор 3. Следует отметить, что модуль 59 преобразования фазного напряжения и модуль 5A преобразования обратных чисел составляют модуль подавления биений.
Далее поясняется работа. Запоминающее устройство 51 значений напряжения постоянного тока и модуль 52 оценки значений напряжения постоянного тока управляются аналогично этим модулям в варианте осуществления 1. В модуле 59 преобразования фазного напряжения значение En+1 оценки напряжения для следующего момента времени дискретизации преобразуется в фазное напряжение V1 с использованием следующего уравнения:

В модуле 5A преобразования обратных чисел значение V2, которое является обратным числом от V1, вычисляется посредством следующего уравнения. Это уравнение позволяет подавить варьирование энергии переменного тока, формируемой посредством инвертора, аналогично уравнению (21) в варианте осуществления 3, так что явление биения может ограничиваться.

В модуле 5B задания заданных значений угловой частоты заданное значение частоты, вводимое внешне, преобразуется в угловую частоту, чтобы задавать заданное значение ω* угловой частоты. Заданное значение ω* угловой частоты вводится в модуль 5C вычислений выходного напряжения, посредством которого заданное значение V* напряжения вычисляется так, что отношение напряжения к его частоте задается постоянным.
В модуле 56B управления напряжением заданное значение V* умножается на V2, и произведения выводятся. В модуле 57A формирования импульсов, стробирующие импульсы, которые должны подаваться на затворы переключающих элементов инвертора 3, управляются так, что инвертор 3 выводит заданные значения трехфазного напряжения (Vu*, Nn*, Vw*) следующим образом:

В случае, если выполняется схема управления постоянством отношения напряжения/частоты, значение напряжения постоянного тока прогнозируется для следующего момента времени дискретизации, и управление выполняется на основе прогнозируемого значения напряжения постоянного тока, так что обеспечивается такой результат, что управление для ограничения явления биения может выполняться без задержки вследствие определения составляющей пульсации и обработки ее вычисления. Помимо этого не используется полосовой фильтр, так что достигается такой результат, что устройство может быть легко адаптировано также для случая, в котором частота источника питания изменяется. Кроме того, поскольку модуль извлечения биений не требуется, конфигурация устройства управления упрощается.
Пятый вариант осуществления
Пятый вариант осуществления - это случай, когда вариант осуществления 3 модифицируется таким образом, чтобы применять его к синхронной машине с постоянными магнитами. Схема, показанная на фиг.9, предназначена для пояснения конфигурации другого устройства преобразования электрической энергии согласно пятому варианту осуществления.
Здесь поясняются только отличия от фиг.7, где показан третий вариант осуществления 3. Вращающаяся машина 4A переменного тока является синхронной машиной с постоянными магнитами. Модуль 55A управления частотой и модуль 56C управления напряжением выполняют управление, соответствющее синхронной машине. Взаимосвязи между модулем 55A управления частотой и модулем 56C управления напряжением и другими составляющими элементами являются аналогичными случаю в варианте осуществления 3.
Далее поясняется работа. Запоминающее устройство 51 значений напряжения постоянного тока и модуль 52 оценки значений напряжения постоянного тока управляются аналогично этим модулям в варианте осуществления 1. Чтобы пояснять операции модуля 56C управления напряжением, следующие параметры задаются как машинные постоянные синхронной машины:
R: значение сопротивления синхронной машины;
Ld: значение индуктивности по d-оси синхронной машины;
Lq: значение индуктивности по q-оси синхронной машины;
Поскольку угловая частота ωinv переменных напряжений, которую выводит инвертор 3, совпадает с угловой частотой вращения синхронной машины, задается следующее уравнение. Фаза θ по d-оси задается посредством уравнения (17).

Напряжения по d-оси и q-оси задаются посредством следующих уравнений, где "p" - это оператор дифференциирования. Член с "p" может опускаться.

В модуле 58 вычислений коэффициентов модуляции, коэффициент PMF модуляции вычисляется из Vd*, заданного посредством уравнения (32), и Vq*, заданного посредством уравнения (33), с использованием уравнения (21), описанного выше. Векторы (Vd*, Vq*) заданных значений напряжения умножаются на коэффициент PMF модуляции, так что получаются заданные значения (Vu*, Nn*, Vw*) трехфазного напряжения, вычисляемые из уравнений (22)-(24), соответственно.
Модуль 57 формирования импульсов формирует стробирующие импульсы, подаваемые на затворы переключающих элементов, которые имеет инвертор 3, так что напряжения трехфазного переменного тока, которые выводит инвертор 3, совпадают с заданными значениями (Vu*, Nn*, Vw*) трехфазного напряжения, выраженными посредством уравнений (22)-(24), соответственно.
В случае, если синхронная машина приводится в действие, значение напряжения постоянного тока прогнозируется для следующего момента времени дискретизации, и управление выполняется на основе прогнозируемого значения напряжения постоянного тока, так что обеспечивается такой результат, что управление для ограничения явления биения может выполняться без задержки вследствие определения составляющей пульсации и обработки ее вычисления. Помимо этого не используется полосовой фильтр, так что достигается такой результат, что устройство может быть легко адаптировано также для случая, в котором частота источника питания изменяется. Кроме того, поскольку не требуется модуль извлечения биений, конфигурация устройства управления упрощается.
Шестой вариант осуществления
Шестой вариант осуществления - это случай, когда модуль оценки значений напряжения постоянного тока прогнозирует постоянное напряжение в период дискретизации момента k времени после последнего момента времени дискретизации. При условии, что параметр "k" задан равным соответствующему значению, которое превышает единицу, можно реализовывать компенсацию, которая включает в себя задержку на управление, в инверторе. Схема, показанная на фиг.10, предназначена для пояснения конфигурации другого устройства преобразования электрической энергии согласно шестому варианту осуществления. Поясняются только отличия от фиг.1, на которой показан первый вариант осуществления. Модуль 52A оценки значений напряжения постоянного тока обеспечивается для прогнозирования напряжения постоянного тока в период дискретизации момента k времени после последнего момента времени дискретизации. Выходной сигнал из модуля 52A оценки значений напряжения постоянного тока вводится в модуль 53 извлечения биений.
Далее поясняется работа. Здесь дополнительно задается следующая переменная.
En+k: значение оценки напряжения в период дискретизации момента k времени после последнего момента времени дискретизации.
Диаграмма, показанная на фиг.11, предназначена для пояснения принципа оценки напряжения согласно шестому варианту осуществления настоящего изобретения. На основе трех значений Vn и Vn-1 и Vn-2 измерения напряжения ранее последнего получается полином, который выражает напряжения, указываемые посредством сплошной кривой, как функцию от времени. Посредством введения в полученный полином времени в период дискретизации момента k времени после последнего момента времени дискретизации значение En+k оценки напряжения вычисляется для периода момента k времени после последнего момента времени дискретизации.
Полином аппроксимации второго порядка для значения напряжения постоянного тока предполагается как уравнение (1), описанное выше. Относительно значений измерения напряжения за три момента времени дискретизации до последнего имеют место уравнения (2)-(4). Посредством вычисления значения En+k оценки напряжения из уравнения (1) задается следующее уравнение:

Посредством исключения коэффициентов a, b и c из уравнений (2)-(4) и уравнения (34) получают следующее уравнение:

Посредством задания k=1,5 из уравнения (35)задается следующее уравнение

Значение En+k оценки напряжения в период дискретизации момента k времени после последнего момента времени дискретизации, который прогнозирует модуль 52A оценки значений напряжения постоянного тока, вводится в модуль 53 определения биений напряжения, так что составляющая Vbeat пульсации получается аналогично случаю в варианте осуществления 1. Уравнение для извлечения задается посредством замены En+1 на En+k в уравнении (13). Последующие операции являются аналогичными операциям в варианте осуществления 1.
Как описано выше, значение напряжения постоянного тока прогнозируется в заранее определенное время (здесь, периоды k), которое должно истекать после последнего момента времени дискретизации, и управление выполняется на основе прогнозируемого значения напряжения постоянного тока, так что обеспечивается такой результат, что управление для ограничения явления биения может выполняться без задержки вследствие определения составляющей пульсации и обработки ее вычисления, и, кроме того, дополнительно компенсируется задержка на управление в инверторе. Помимо этого не используется полосовой фильтр, так что достигается такой результат, что устройство может быть легко адаптировано также для случая, в котором изменяется частота источника питания.
Заранее определенное время не ограничено k=1,5, в конечном счете "k" может быть определено как соответствующее значение посредством его фактического применения на основе экспериментов так, что достигается лучший результат управления. Помимо этого можно адаптировать то, что экстраполяция реализуется с использованием приближенного выражения третьего порядка или выше. Хотя подробности извлечения опускаются, следующее уравнение задается, когда значение напряжения постоянного тока в периоды дискретизации момента k времени после последнего момента времени дискретизации прогнозируется посредством экстраполяции полинома аппроксимации третьего порядка на основе значений измерения напряжения за четыре момента времени дискретизации до последнего.
Аналогично, следующее уравнение задается, когда используется полином аппроксимации четвертого порядка.

Следующее уравнение задается, когда используется уравнение (37), посредством задания k=1,5.

Следующее уравнение задается, когда используется уравнение (38).

Чтобы исключить влияние, вызываемое посредством шума и т.п., можно конфигурировать устройство так, что напряжение на конденсаторе 2, измеряемое посредством модуля 6 определения напряжения, проходит через фильтр, который удаляет высокочастотные составляющие из напряжения, которое сохранено, и затем используется в модуле оценки значений напряжения постоянного тока. Вместо использования фильтра, можно конфигурировать устройство так, что число значений измерения напряжения постоянного тока возрастает, и получается и используется для оценки полиномиальная аппроксимация, в которой минимизируются квадратичные ошибки,. Помимо этого, постоянное напряжение может прогнозироваться в заранее определенное время (здесь, период k), которое должно истекать после последнего момента времени дискретизации, с использованием полиномиальной аппроксимации, полученной в единицах заранее определенного числа периодов дискретизации (например, двух периодов).
Следует отметить, что хотя случаи, в которых вращающаяся машина переменного тока используется в качестве нагрузки, соединенной с устройством преобразования электрической энергии, описываются в вариантах осуществления 1-6 настоящего изобретения, вращающаяся машина переменного тока не ограничена асинхронной машиной или синхронной машиной, аналогичные результаты могут предполагаться для любого вида вращающейся машины переменного тока.
Кроме того, аналогичные результаты могут предполагаться, когда инвертирование применяется к устройству преобразования электрической энергии для управления электромагнитным приводом, таким как линейный асинхронный электродвигатель, линейный синхронный электродвигатель, соленоид и т.п., помимо таких вращающихся машин переменного тока.
Каждая из конфигураций, описанных в вариантах осуществления выше, является примером содержимого настоящего изобретения, и таким образом, можно реализовывать настоящее изобретение посредством комбинирования с другими общеизвестными технологиями, а также конфигурировать его с модификацией, к примеру, с исключением некоторых разделов, без отступления от сущности настоящего изобретения.
Промышленная применимость
Настоящее изобретение заключается в создании устройства преобразования электрической энергии для приведения в действие вращающейся машины переменного тока с изменяемой скоростью, использующей в качестве постоянного тока источник питания, полученный посредством выпрямления с использованием преобразователя тока от источника питания переменного тока. Устройство предположительно применяется, в частности, к электрическому железнодорожному составу, который предназначен для электрической железной дороги, работающей на переменном токе. Кроме того, устройство также применимо к кондиционерам, используемым для электрических железнодорожных составов, и к бытовым электроприборам, в которых электродвигатель управляется посредством инвертора, таким как кондиционеры, холодильники и стиральные машины.
Пояснение номеров ссылок
1 - преобразователь;
2 - конденсатор;
3 - инвертор;
4 - вращающаяся машина переменного тока (асинхронная машина);
4А - вращающаяся машина переменного тока (синхронная машина);
5 - устройство управления;
51 - запоминающее устройство значений напряжения постоянного тока;
52 - модуль оценки значений напряжения постоянного тока;
53 - модуль извлечения биений;
54 - модуль вычислений контрольных значений угловой частоты (модуль подавления биений);
55 - модуль управления частотой;
55А - модуль управления частотой;
56 - модуль управления напряжением;
56А - модуль управления напряжением;
56В - модуль управления напряжением;
56С - модуль управления напряжением;
57 - модуль формирования импульсов;
57А - модуль формирования импульсов;
58 - модуль вычислений коэффициентов модуляции (модуль подавления биений);
59 - модуль преобразования фазного напряжения (модуль подавления биений);
5А - модуль преобразования обратных чисел (модуль подавления биений);
5В - модуль установки заданных значений угловой частоты;
5С - модуль вычислений выходного напряжения;
6 - модуль детектирования напряжения (модуль измерений напряжения постоянного тока);
7 - датчик вращения;
8 - фильтр.









Изобретение относится к преобразователям электрической энергии. В традиционном устройстве преобразования электрической энергии управляющий микропроцессор выполняет управление для исключения или ограничения явления биений, так что возникает задержка на управление, поскольку в управляющем микропроцессоре требуется время для вычислений. Вследствие задержки на управление невозможно получить результат достаточного уменьшения пульсации тока и пульсации крутящего момента. Помимо этого в электрическом железнодорожном составе, в котором меняется частота источника питания переменного тока, когда железнодорожный состав движется, для осуществления способа детектирования составляющей пульсации посредством полосового фильтра требуется предоставление множества полосовых фильтров, и затем их переключение выполняется в зависимости от частоты источника питания, приводя к трудностям при принятии ответных мер. Устройство преобразования электрической энергии согласно настоящему изобретению сохраняет значения напряжения постоянного тока в заранее определенные моменты времени дискретизации до последнего и прогнозирует значение оценки напряжения постоянного тока для заранее определенного истекшего времени от последнего момента времени дискретизации с использованием сохраненных значений напряжения постоянного тока, посредством чего с помощью прогнозируемого значения оценки напряжения постоянного тока амплитуда и/или частота энергии переменного тока, которую выводит инвертор, управляется так, чтобы ограничивать варьирование энергии переменного тока, которую выводит инвертор, вследствие пульсации, вызываемой на стороне постоянного тока инвертора. Технический результат - ограничение варьирования энергии на выходе. 5 з.п. ф-лы, 11 ил.
1. Устройство преобразования электрической энергии для электрического железнодорожного вагона, содержащее: преобразователь для преобразования энергии переменного тока, проходящей между линией и рельсом, в энергию постоянного тока; конденсатор, соединенный параллельно с преобразователем на стороне постоянного тока, модуль измерений напряжения постоянного тока для измерения напряжения на конденсаторе; инвертор, включающий в себя переключающие элементы, соединенный параллельно с конденсатором для преобразования энергии постоянного тока в энергию переменного тока произвольной частоты; и
управляющий микропроцессор, в который значения напряжения постоянного тока, каждое из которых измеряется посредством модуля измерений напряжения постоянного тока, вводятся в заранее определенный период дискретизации для управления инвертором, при этом управляющий микропроцессор включает в себя: модуль управления напряжением для управления амплитудой напряжения энергии переменного тока, которую выводит инвертор; модуль управления частотой для управления частотой энергии переменного тока, которую выводит инвертор; запоминающее устройство значений напряжения постоянного тока для сохранения значений напряжения постоянного тока в заранее определенные моменты времени дискретизации до последнего;
модуль оценки значений напряжения постоянного тока для прогнозирования значения оценки напряжения постоянного тока в заранее определенное время после следующего момента времени дискретизации с использованием значений напряжения постоянного тока в заранее определенные моменты времени дискретизации в обратном порядке от последнего, сохраненных в запоминающем устройстве значений напряжения постоянного тока; и
модуль подавления биений, в который значение оценки напряжения постоянного тока, прогнозируемое посредством модуля оценки значений напряжения постоянного тока, вводится для управления одним или обоими из модуля управления напряжением и модуля управления частотой, чтобы ограничивать варьирование энергии переменного тока, которую выводит инвертор, вследствие пульсации, вызываемой на стороне постоянного тока инвертора, и в котором: модуль оценки значений напряжения постоянного тока получает полином заранее определенного порядка, который аппроксимирует значения напряжения постоянного тока, сохраненные в запоминающем устройстве значений напряжения постоянного тока, и с использованием полинома прогнозирует значения оценки напряжения постоянного тока в заранее определенное время после последнего момента времени дискретизации.
2. Устройство преобразования электрической энергии по п.1, в котором модуль подавления биений управляет модулем управления частотой так, что частота уменьшается, когда значение оценки напряжения постоянного тока, прогнозируемое посредством модуля оценки значений напряжения постоянного тока, возрастает, и частота возрастает, когда значение оценки напряжения постоянного тока уменьшается.
3. Устройство преобразования электрической энергии по п.1, в котором модуль подавления биений управляет модулем управления напряжением так, что амплитуда напряжения уменьшается, когда значение оценки напряжения постоянного тока, прогнозируемое посредством модуля оценки значений напряжения постоянного тока, возрастает, и амплитуда напряжения возрастает, когда значение оценки напряжения постоянного тока уменьшается.
4. Устройство преобразования электрической энергии по п.1, в котором модуль оценки значений напряжения постоянного тока прогнозирует значение En+k оценки напряжения постоянного тока в периоды дискретизации момента k времени после последнего момента времени дискретизации с использованием следующего уравнения на основе значения Vn напряжения постоянного тока, измеряемого в последний момент времени дискретизации посредством модуля измерений напряжения постоянного тока, и на основе значения Vn-1 напряжения постоянного тока в момент времени дискретизации на один период ранее, и значения Vn-2 напряжения постоянного тока в момент времени дискретизации на два периода ранее, сохраненных в запоминающем устройстве значений напряжения постоянного тока
En+k=((k2+3·k+2)/2)·Vn-(k2+2·k)·Vn-1
+((k2+k)/2)·Vn-2.
5. Устройство преобразования электрической энергии по п.1, в котором модуль оценки значений напряжения постоянного тока прогнозирует значение En+k оценки напряжения постоянного тока в периоды дискретизации момента k времени после последнего момента времени дискретизации с использованием следующего уравнения на основе значения Vn напряжения постоянного тока, измеряемого в последний момент времени дискретизации посредством модуля измерений напряжения постоянного тока, и на основе значения Vn-1 напряжения постоянного тока в момент времени дискретизации на один период ранее, значения Vn-2 напряжения постоянного тока в момент времени дискретизации на два периода ранее и значения Vn-3 напряжения постоянного тока в момент времени дискретизации на три периода ранее, сохраненных в запоминающем устройстве значений напряжения постоянного тока
En+k=((k3+6·k2-5·k+6)/6)·Vn
-((k3+5·k2-6·k)/2)·Vn-1
+((k3+4·k2-3·k)/2)Vn-2
-((k3+3·k2-2·k)/6)·Vn-3.
6. Устройство преобразования электрической энергии по п.1, в котором модуль оценки значений напряжения постоянного тока прогнозирует значение En+k оценки напряжения постоянного тока в периоды дискретизации момента k времени после последнего момента времени дискретизации с использованием следующего уравнения на основе значения Vn напряжения постоянного тока, измеряемого в последний момент времени дискретизации посредством модуля измерений напряжения постоянного тока, и на основе значения Vn-1 напряжения постоянного тока в момент времени дискретизации на один период ранее, значения Vn-2 напряжения постоянного тока в момент времени дискретизации на два периода ранее, значения Vn-3 напряжения постоянного тока в момент времени дискретизации на три периода ранее и значения Vn-4 напряжения постоянного тока в момент времени дискретизации на четыре периода ранее, сохраненных в запоминающем устройстве значений напряжения постоянного тока
En+k=((k3+6·k2-5·k+6)/6)·Vn
-((k4+9·k3-26·k2+12·k)/6)·Vn-1
+((k4+8·k3+19·k2+12·k)/4)Vn-2
-((k4+7·k3+14·k2+8·k)/6)·Vn-3
+((k4+6·k3+11·k2+6·k)/24)Vn-4.
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Устройство управления статическим преобразователем частоты | 1978 |
|
SU1148573A3 |

