Изобретение относится к устройству управления электрическим подвижным составом, в частности к устройству управления, которое предназначено для управления работающим от инвертора приводным электродвигателем электрического подвижного состава без использования какого-либо датчика скорости электродвигателя.
В настоящее время для управления асинхронным двигателем, работающим от инвертора, используются системы векторного регулирования, которые требуют наличия обратной связи или определенной реакции на управляющее воздействие. В системах векторного регулирования осуществляется независимое регулирование тока возбуждения и тока нагрузки или тягового тока электродвигателя. Обычно для этих целей используют систему векторного регулирования по частоте скольжения, в которой выходная частота инвертора регулируется суммированием частоты скольжения, зависящей от крутящего момента электродвигателя, с измеренной величиной скорости вращения электродвигателя. Поскольку, однако, необходимость использования в таких системах датчика скорости электродвигателя создает определенные проблемы, связанные с необходимостью прокладки проводов от датчика скорости к управляющему устройству инвертора и определенными дополнительными затратами, необходимостью обслуживания самого датчика и другими аналогичными моментами, сравнительно недавно были предложены другие системы управления, не требующие использования никаких датчиков скорости вращения приводного двигателя. В качестве примера такой системы управления можно назвать систему, предложенную в патенте JP-A 9-140200. В этой системе скорость вращения определяется расчетом по измеренной величине тока возбуждения, току нагрузки, сигналу управления напряжением и постоянной времени регулируемого электродвигателя.
Еще один пример системы управления электрическим подвижным составом описан в патенте JP-A 8-80082. В этой системе управления имеется регулятор тока, который выдает команду на переменную по времени скорость изменения частоты, что позволяет существенно снизить разницу между измеренным и заданным значением выходного тока инвертора и получить путем интегрирования по времени выходного сигнала сигнал управления выходной частоты инвертора. При этом, однако, измеренное значение сигнала датчика скорости, установленного на электродвигателе, задается как начальное значение его выходной частоты в момент запуска инвертора. Кроме того, в железнодорожном электрическом подвижном составе, в котором чугунные колеса со сцеплением катятся по изготовленным из стали рельсам, возникает такое характерное явление, как пробуксовка или проскальзывание ведущих колес. Для того, чтобы посредством соответствующего регулирования и создания условий для повторного сцепления колес с рельсами избежать нежелательных последствий, связанных с пробуксовкой и проскальзыванием колес, на электродвигателе устанавливается датчик скорости.
В системе управления, описанной в упомянутом выше патенте JP-A 9-140200, для управления инвертором не используется датчик скорости приводного двигателя, при этом, однако, приходится учитывать изменения постоянной времени приводного электродвигателя при выполнении сложных расчетов, необходимых для оценки или задания расчетного значения предполагаемой скорости вращения электродвигателя.
Кроме того, в патенте JP-A 8-80082 при инициализации интегратора и при соответствующем регулировании и создании условий для повторного сцепления колес с рельсами используется выходной сигнал датчика скорости, и поэтому такую систему нельзя назвать системой, вообще не использующей датчик скорости.
Задачей настоящего изобретения является разработка такого устройства управления электрическим подвижным составом, которое позволило бы полностью исключить необходимость в использовании какого-либо датчика скорости или тахометра, установленного на электродвигателе, который приводит в движение электрический подвижной состав, и которое позволяло бы осуществлять необходимое для электрического подвижного состава регулирование ускорения и торможения работающего от инвертора электродвигателя и создавать соответствующим регулированием условия для повторного сцепления колес с рельсами посредством оценки или задания расчетного значения предполагаемой скорости вращения электродвигателя простыми по конструкции средствами.
Указанная выше задача решается с помощью предлагаемого в изобретении устройства управления электрическим подвижным составом, которое имеет электродвигатель, приводящий в движение электрический подвижной состав, инвертор, вырабатывающий переменный ток переменного напряжения и переменной частоты, который подается на электродвигатель, устройство оценки или задания расчетного значения скорости вращения, которое предназначено для оценки или расчета предполагаемой скорости вращения электродвигателя, и устройство регулирования, которое регулирует инвертор на основе расчетных значений предполагаемой скорости вращения, полученных устройством задания расчетного значения предполагаемой скорости вращения двигателя. Такое устройство управления отличается тем, что электрический подвижной состав имеет по крайней мере одно устройство для автоматического управления составом, которое автоматически управляет электрическим подвижным составом на основании сигналов скорости электрического подвижного состава, тахометр, который измеряет скорость вращения не ведущего колеса электрического подвижного состава, и датчик ускорения, который измеряет ускорение электрического подвижного состава, а также тем, что устройство для задания расчетного значения предполагаемой скорости вращения двигателя имеет устройство для задания расчетного значения предполагаемой скорости вращения электродвигателя на основании сигнала скорости электрического подвижного состава или сигналов, полученных в процессе измерения.
Кроме того, поставленная в изобретении задача решается за счет того, что в предлагаемом устройстве управления при повторном запуске инвертора с целью получения мощности, необходимой для движения состава или при работе в режиме рекуперации и выключения инвертора при движении состава по инерции, используется устройство для запоминания расчетных величин скорости вращения в устройстве для задания расчетного значения предполагаемой скорости вращения двигателя во время начала движения электрического подвижного состава по инерции и устройство для задания расчетных значений предполагаемой скорости вращения электродвигателя во время повторного запуска инвертора на основании запоминаемых расчетных значений скорости вращения.
Кроме того, для регулирования и создания условий для повторного сцепления колес с рельсами в изобретении предлагается использовать устройство для расчета времени изменения величины расчетного значения предполагаемой скорости вращения электродвигателя, определенного устройством задания расчетного значения предполагаемой скорости вращения двигателя, и изменения в соответствии с этим времени пробега, и устройство для уменьшения определяющей крутящий момент или тяговой составляющей сигнала команды в соответствии с временем изменения величины расчетного значения предполагаемой скорости вращения двигателя или уменьшения тяговой составляющей сигнала команды по виду заданной временной функции.
На прилагаемых к описанию чертежах показано:
на фиг. 1 - схема, на которой показаны основные элементы одного из вариантов выполнения предлагаемого в настоящем изобретении устройства управления,
на фиг. 2 - схема показанного на фиг. 1 блока задания расчетного значения предполагаемой скорости предлагаемого в настоящем изобретении устройства управления,
на фиг. 3 - схема другого варианта выполнения показанного на фиг. 1 блока задания расчетного значения предполагаемой скорости предлагаемого в настоящем изобретении устройства управления,
на фиг. 4 - схема еще одного варианта выполнения показанного на фиг. 1 блока задания расчетного значения предполагаемой скорости предлагаемого в настоящем изобретении устройства управления,
на фиг. 5а, 5б и 5в - графики изменения соответствующих величин во время повторного пуска инвертора, полученные при моделировании на устройстве управления по настоящему изобретению,
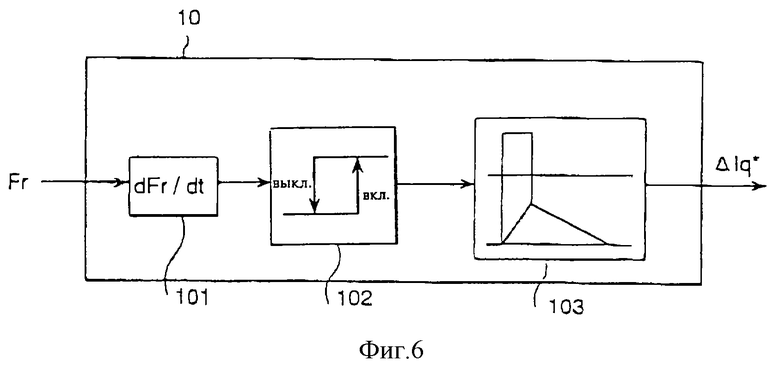
на фиг. 6 - схема контроллера для регулирования и создания условий для повторного сцепления колес с рельсами, используемого в устройстве управления по настоящему изобретению, и
на фиг. 7а, 7б и 7в - графики изменения соответствующих величин при проскальзывании колес, полученные при моделировании на устройстве управления по настоящему изобретению.
На фиг. 1 показана принципиальная схема одного из вариантов выполнения устройства управления по настоящему изобретению. На фиг. 1 показана схема устройства управления, предназначенного для управления приводом электрического подвижного состава, движущегося по рельсам железной дороги. Обычный железнодорожный состав, который на чертежах не показан, имеет ряд соединенных друг с другом подвижных вагонов с электрическим приводом, каждый из которых имеет свое устройство управления, в которое из расположенной в голове состава кабины по имеющейся на составе локальной сети или другим соответствующим способом передаются команды, соответствующие командам движение/остановка, и команды, по которым изменяется крутящий момент или создаваемая приводом тяга.
На фиг. 1 позицией 1 обозначен инвертор широтно-импульсной модуляции (ШИМ), инвертирующий постоянный ток в переменный (с его обратным преобразованием) с помощью ряда имеющихся в нем переключающих элементов, а позицией 12 обозначен фильтрующий конденсатор, который сглаживает постоянный ток источника 11 постоянного тока, который соединен с предназначенными для соединения с источником постоянного тока клеммами инвертора 1. Расположенные на другой стороне инвертора 1 клеммы соединены с трехфазным асинхронным электродвигателем 2 (в дальнейшем называемом просто двигателем), который вращает ведущие колеса вагона подвижного электрического состава. В рассматриваемом варианте к клеммам переменного тока инвертора 1 подсоединен только один двигатель, хотя в целом ряде случаев каждый подвижной вагон с электрическим приводом имеет 2 или 4 соединенных с инвертором двигателя.
Позицией 3 на схеме обозначен электрический генератор сигналов управления, который вырабатывает сигнал Id* управления током возбуждения, и исходный сигнал Iq* управления тяговым током. Позицией 4 на схеме обозначено устройство для снижения компоненты сигнала задания тягового тока инвертора в зависимости от величин происходящих во времени изменений предполагаемой скорости вращения двигателя или в зависимости от формы заранее заданной временной функции в том случае, когда эти величины превышают заданное значение, частным случаем выполнения которого является блок вычитания, в котором выходной сигнал ΔIq* контроллера 10, предназначенного для регулирования и создания условий для повторного сцепления колес с рельсами, вычитается из исходного сигнала Iq* управления тяговым током с получением на выходе конечного сигнала Iq** управления тяговым током. Позицией 5 на схеме обозначен координатный преобразователь, на вход которого подаются сигналы iu, iv, iw, измеренные датчиками 14u, 14v, 14w тока, измеряющими переменный ток на выходе из ШИМ-инвертора 1, и который преобразует их в сигнал Id составляющей измеренного тока возбуждения и сигнал Iq составляющей измеренного тягового тока. Позицией 7 на схеме обозначен блок вычитания, в котором сигнал Iq составляющей измеренного тягового тока вычитается из конечного сигнала Iq* управления тяговым током с получением на выходе сигнала ΔIq разности тягового тока. Позицией 8 на схеме обозначен блок оценки или задания расчетного значения предполагаемой скорости вращения, который выдает сигнал расчетного значения предполагаемой скорости вращения двигателя 2 по сигналу ΔIq разности тягового тока и сигналу Vt скорости электрического подвижного состава, который выдает детектор 13 скорости электрического подвижного состава. Упомянутый выше контроллер 10, предназначенный для регулирования и создания условий для повторного сцепления колес с рельсами, определяет наличие пробуксовки и проскальзывания колес, приводимых в движение двигателем 2, по поступающему на него сигналу Fr расчетной скорости вращения двигателя и выдает сигнал ΔIq*, по которому при определении пробуксовки и проскальзывания колес до минимума снижается конечный сигнал управления тяговым током. Позицией 6 на схеме обозначен арифметический блок системы векторного регулирования, который на основании сигнала Id* управления током возбуждения, конечного сигнала Iq** управления тяговым током и сигнала Fr расчетной скорости вращения двигателя вычисляет и выдает в виде напряжений сигналы Vd*, Vq* управления для данного асинхронного двигателя. Устройство и работа этого блока более подробно описаны в патенте Японии JP-A 9-140200 и поэтому в настоящем описании не рассматриваются. Позицией 9 обозначен арифметический блок обработки ШИМ-сигналов, который по поступающим в него сигналам Vd*, Vq* управления выдает ШИМ-сигналы Su, Sv, Sw релейных импульсов, поступающие в инвертор 1.
Функции нескольких показанных для наглядности на фиг. 1 в виде отдельных блоков элементов предлагаемого в настоящем изобретении устройства управления, в частности блоков 4-8 и 10, можно достаточно просто реализовать с помощью соответствующих программных средств, используя для этой цели обычный микропроцессор.
В рассмотренном выше устройстве управления отличительные особенности настоящего изобретения связаны с наличием в нем блока 8 оценки или задания расчетного значения предполагаемой скорости вращения асинхронного электродвигателя и контроллера 10, который, фиксируя пробуксовку и проскальзывание колес, осуществляет путем соответствующего регулирования создание условий для повторного сцепления колес с рельсами.
Ниже подробно рассмотрены несколько вариантов возможного выполнения этих устройств.
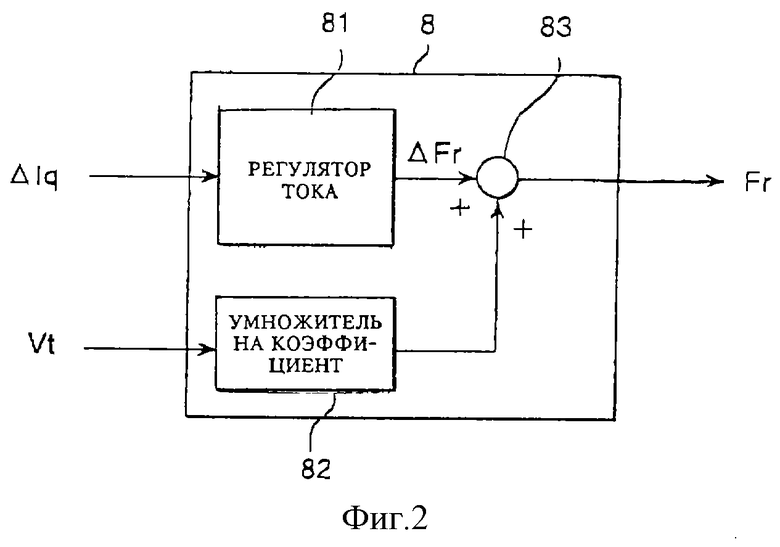
На фиг. 2 показана схема возможного варианта выполнения используемого в предлагаемом в настоящем изобретении устройстве управления блока 8 оценки или расчетного определения предполагаемой скорости вращения двигателя. Позицией 81 на этой схеме обозначен регулятор тока, который, например, реализует пропорционально-интегральный закон регулирования по приведенной ниже формуле и выдает сигнал ΔFr, при котором величина ΔIq разности тяговых токов становится существенно малой (близкой к 0). В этом уравнении K1 и К2 представляют собой коэффициенты пропорционального и интегрального членов соответственно, a s означает оператор Лапласа:
ΔFr = (K1+ K2/s)ΔIq.
Позицией 82 на схеме обозначен умножитель на коэффициент, который используется для умножения на коэффициент, благодаря чему осуществляется преобразование сигнала Vt скорости движения электрического подвижного состава в скорость вращения двигателя. Позицией 83 на схеме обозначен сумматор, который суммирует выходной сигнал ΔF регулятора 81 тока с выходным сигналом умножителя 82 коэффициентов и выдает сигнал Fr расчетной скорости вращения двигателя.
Такая схема позволяет обеспечить необходимую скорость вращения двигателя по величине сигнала Fr расчетной скорости вращения двигателя без всякого использования какого-либо установленного на двигателе датчика скорости. В данном случае сигнал скорости электрического подвижного состава представляет собой сигнал скорости, полученный с помощью детектора, используемого для обычного управления скоростью движения электрического подвижного состава, например, с помощью устройства автоматического торможения поезда (АТП), контроллера автоматического управления поездом (КАУП) и т.д., или сигнал скорости устройства автоматического управления поездом (АУП) (в описании все эти устройства АТП, КАУП и АУП названы одним общим понятием "контроллер автоматического управления поездом", который и выдает необходимый сигнал Vt скорости). Возможен и другой вариант выполнения системы управления, когда в качестве сигнала скорости электрического подвижного состава используется выходной сигнал от детектора скорости, соединенного с валом не ведущего колеса, от которого работает прибор для измерения скорости, или величина, полученная интегрированием сигнала датчика ускорения, используемого для измерения ускорения электрического подвижного состава при его движении вперед и назад. В этом случае, в отличие от датчика скорости, датчик ускорения можно расположить в любом месте вагона (состава), в частности внутри самого устройства управления, исключив тем самым необходимость в использовании проводов, соединяющих его с устройством управления, и снизив тем самым стоимость всей системы управления.
Рассмотренные подробно ниже результаты моделирования, полученные на предлагаемом устройстве управления, показывают, что в нем в качестве сигнала скорости вполне можно использовать сигнал Vt скорости электрического подвижного состава даже при небольшой точности его совпадения с фактической скоростью или при наличии задержки времени в процессе измерения этой скорости. Возможная ошибка, связанная с несовпадением сигнала Vt скорости с фактической скоростью движения электрического подвижного состава, корректируется выходным сигналом ΔFr регулятора 81 тока.
Необходимость корректировки сигналом Fr расчетной скорости вращения двигателя, который является выходным сигналом регулятора 81 тока, сигнала Vt скорости электрического подвижного состава, обусловлена: 1) снижением неустойчивости системы управления, использующей сигнал Fr расчетной скорости вращения двигателя, который определяется только выходным сигналом регулятора 81 тока, и 2) снижением нестабильности сигнала Fr расчетной скорости вращения двигателя, определяемого по выходному сигналу регулятора тока, при разгоне электрического подвижного состава или при работе в режиме рекуперации мощности в процессе повторного запуска инвертора при переходе с режима движения по инерции до остановки инвертора в процессе управления движением электрического подвижного состава.
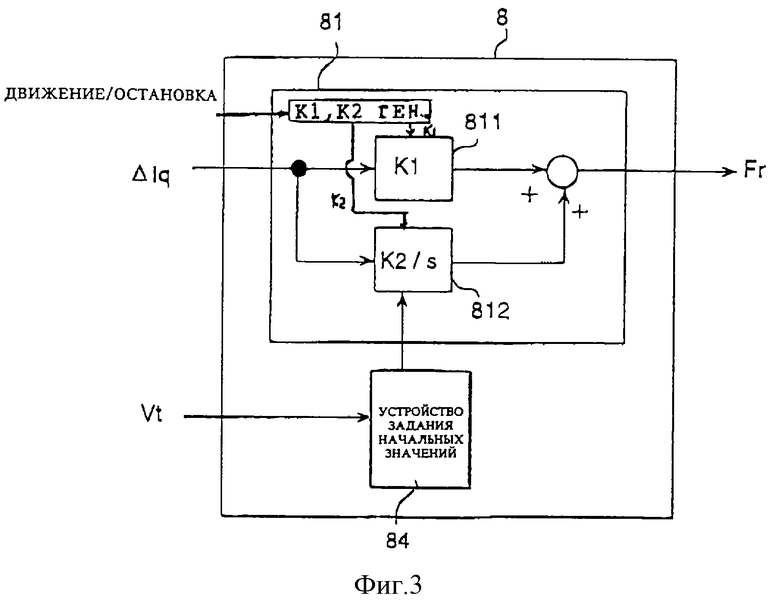
На фиг. 3 показана схема другого варианта выполнения предлагаемого в настоящем изобретении блока 8 оценки или задания расчетного значения предполагаемой скорости вращения двигателя. Основное отличие этого блока от блока, схема которого показана на фиг. 2, заключается в том, что в нем предусмотрено задание начальных значений параметров интегрирующего звена 812, которое вместе с резистором 811, сопротивление которого определяет величину коэффициента пропорциональности, образует регулятор 81 тока. Позицией 84 на этой схеме обозначено устройство для задания начальных значений интегрирующего звена, которое преобразует сигнал Vt скорости электрического подвижного состава в сигнал скорости вращения двигателя и задает начальную величину имеющегося в контроллере 81 тока интегрирующего звена. При остановленном подвижном составе начальное значение интегрирующего звена принимается равным нулю, однако при повторном запуске инвертора после его остановки при разгоне электрического подвижного состава (режим рекуперации мощности) в качестве начального значения интегрирующего звена необходимо с помощью устройства 84 задания начальных значений задать такую начальную величину, которая должна соответствовать фактической скорости движения электрического подвижного состава в этот момент времени. Рассмотренные подробно ниже результаты моделирования показывают, что сигнал Vt скорости электрического подвижного состава, по которому задается начальная величина, не должен оказывать большого влияния на управление движением поезда даже при невысокой точности его совпадения с фактической скоростью или при наличии задержки времени в процессе измерения этой скорости.
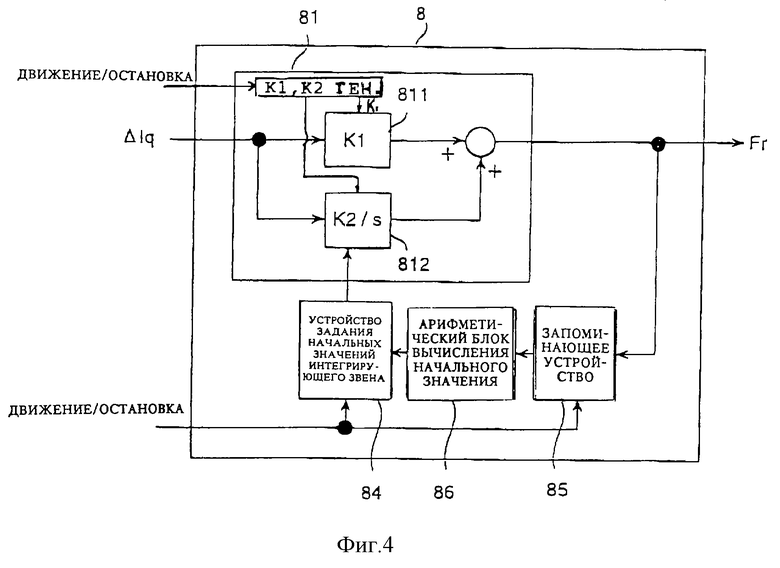
На фиг. 4 показана схема другого варианта выполнения предлагаемого в настоящем изобретении блока 8 оценки или задания расчетного значения предполагаемой скорости вращения двигателя. Основное отличие этого блока оценки или задания расчетного значения скорости от блоков оценки или задания расчетного значения скорости, схемы которых показаны на фиг. 2 и 3, заключается в том, что в этом варианте для расчета скорости вращения двигателя не используется сигнал Vt скорости электрического подвижного состава. На электрическом подвижном составе имеется генератор команд управления (не показан), который выдает поступающие в блок управления инвертора электрического подвижного состава команды, связанные с его работой/остановкой, в частности команду на работу в режиме потребления мощности и работу в режиме рекуперации мощности и команду на работу в режиме торможения состава (движения по инерции). В показанном на фиг. 4 варианте выполнения блока оценки или задания расчетного значения скорости имеются устройство 84 для задания начальных значений и запоминающее устройство 85, которые работают в соответствии с поступающими в них командами, связанными с работой/остановкой инвертора. В начале движения электрического подвижного состава сразу же после его остановки начальное значение интегрирующего звена 812 устанавливается устройством 84 задания начальных значений равным 0. Затем при подаче команды на работу в режиме торможения (движения по инерции), которая выдается после того, как начавший движение электрический подвижной состав достиг заданной скорости движения, работа инвертора прекращается, а в запоминающем устройстве 85 сохраняется значение сигнала Fr расчетной скорости вращения двигателя в момент остановки инвертора. Кроме того, в такой схеме вместо величины сигнала Fr расчетной скорости вращения двигателя в запоминающем устройстве можно сохранять величину выходного сигнала интегрирующего звена 812. В арифметическом блоке 86 вычисления начального значения до повторного запуска инвертора вычисляется скорость вращения двигателя во время движения состава по инерции с учетом скорости, которая определяется величиной сохраняемого в запоминающем устройстве сигнала Fr расчетной скорости вращения и, например, трением качения, сопротивлением воздуха и продолжительностью движения состава по инерции, а полученный в результате вычислений результат подается на вход устройства 84 задания начальных значений. Следует отметить, что в предлагаемом в настоящем изобретении устройстве управления необязательно иметь арифметический блок 86 вычисления начального значения, а вместо этого непосредственно подавать на вход устройства 84 задания начальных значений сохраняемую в запоминающем устройстве величину сигнала Fr расчетной скорости вращения двигателя. При повторном запуске инвертора после его остановки устройство 84 задания начальных значений выдает поступающий в него из арифметического блока 86 вычисления начального значения сигнал в качестве начального значения в интегрирующее звено 812 регулятора 81 тока.
Ниже приведены характеристики инвертора при работе в переходных режимах ускорения и торможения, полученные в результате моделирования на устройстве управления, принципиальная схема которого показана на фиг. 1, с устройством для оценки или задания расчетного значения предполагаемой скорости вращения двигателя, выполненным по одному из трех рассмотренных выше вариантов, в частности по схеме, показанной на фиг. 3.
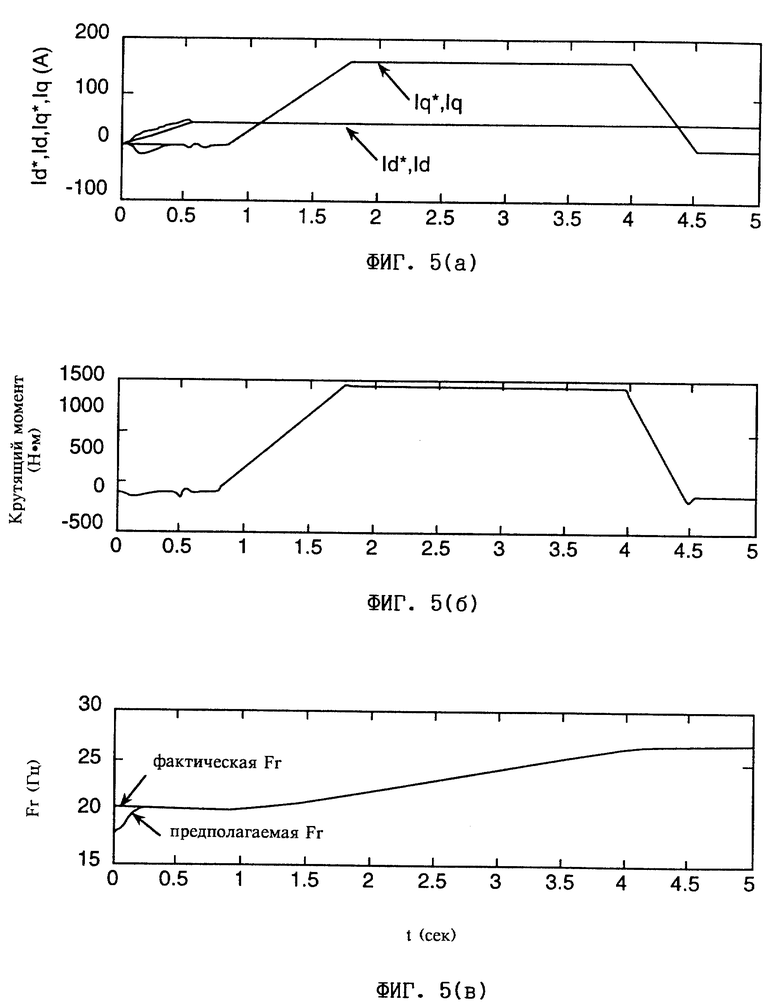
Показанные на фиг. 5а, 5б и 5в полученные моделированием характеристики инвертора при ускорении состава относятся к режиму повторного запуска инвертора после движения состава по инерции, т.е. к наиболее сложному по оценке или расчетам режиму работы инвертора. На фиг. 5а показаны графики изменения во времени t (сек) поданного сигнала Id* управления током возбуждения и его измеренного значения Id и поданного сигнала управления тяговым током и его измеренного значения, на фиг. 5б показан график изменения во времени t (сек) крутящего момента двигателя, а на фиг. 5в показан график изменения во времени t (сек) фактической (Fr) и расчетной (Fr) скорости вращения двигателя. В процессе моделирования система была настроена следующим образом. Начальное значение интегрирующего звена 812 задавалось в момент перехода системы от режима рекуперации мощности к режиму повторного запуска инвертора с ошибкой между расчетным значением скорости вращения двигателя, равной 20 Гц, и фактической скоростью, равной 18 Гц, увеличение поданного сигнала Id* управления током возбуждения началось при t=0, а увеличение поданного сигнала Iq* управления тяговым током началось при t=0,8 сек.
Приведенные на фиг. 5 графики показывают, что с началом возрастания тока возбуждения благодаря работе блока 8 оценки или задания расчетного значения предполагаемой скорости расчетная скорость Fr вращения двигателя начинает быстро расти и практически сразу же сравнивается с фактической скоростью Fr вращения двигателя и в дальнейшем все время остается равной ей. Полученные при моделировании результаты показывают также, что наличие в системе управления регулятора тока обеспечивает хорошее совпадение определенной расчетом скорости вращения двигателя с его фактической скоростью вращения даже при наличии незначительной ошибки в задании начальной величины параметров регулятора тока. Кроме того, полученные результаты показывают, что увеличение сигнала Iq* управления тяговым током сопровождается практически таким же увеличением крутящего момента двигателя и что управление процессом разгона состава можно реализовать без каких-либо проблем с помощью предлагаемого устройства управления, не используя для этой цели датчик фактической скорости вращения двигателя. В процессе моделирования было также установлено, что при слишком большой ошибке в задании начального значения параметров регулятора тока (этот вариант на графиках не показан), должного ускорения двигателя не происходит, а его определенная расчетами и фактическая скорости не совпадают друг с другом. Такой результат дополнительно подтверждает преимущества предлагаемого в настоящем изобретении устройства управления, обеспечивающего возможность оптимального задания начальных параметров всей системы регулирования.
Приведенные выше результаты свидетельствуют о том, что использование в устройстве управления электрическим подвижным составом блока 8 оценки или задания расчетного значения предполагаемой скорости вращения двигателя, выполненного по любому из трех показанных на фиг. 2-4 вариантов, позволяет после остановки инвертора во время движения электрического подвижного состава и его повторного запуска обеспечить должное регулирование привода электрического подвижного состава без всякого измерения действительной скорости вращения двигателя.
Кроме того, приведенные выше результаты моделирования были получены при постоянных значениях коэффициентов К1 и К2 регулятора 81 тока, при этом, однако, было установлено, что когда усиление регулятора 81 тока превышает нормальное (т. е. при повышении быстродействия регулятора тока), время, необходимое для того, чтобы при запуске или повторном запуске инвертора расчетная скорость вращения двигателя, определяемая с определенной ошибкой начальной настройкой регулятора, сравнялась с фактической скоростью вращения, можно соответствующим образом сократить. Тем самым, как очевидно, можно добиться и соответствующего повышения быстродействия и устойчивости всей системы регулирования привода электрического подвижного состава.
Ниже более подробно рассмотрена конструкция контроллера 10 устройства управления по настоящему изобретению, в котором не используется выходной сигнал связанного с приводным двигателем тахометра и который в условиях пробуксовки и проскальзывания колес осуществляет посредством соответствующего регулирования создание условий для повторного сцепления колес с рельсами. Основную идею настоящего изобретения, связанную с использованием такого контроллера, можно проиллюстрировать на примере пробуксовки колес. Поскольку отличие пробуксовки колес от проскальзывания проявляется только в изменении на противоположное направление процессов, протекающих в системе регулирования, то останавливаться на работе системы в случае проскальзывания колес нет никакой необходимости. В устройстве управления, схема которого показана на фиг. 1, при пробуксовке колеса (не показано), приводимого в движение двигателем 2, скорость вращения колеса мгновенно возрастает, а частота скольжения подаваемого на двигатель тока падает. В это время ток двигателя или тяговый ток Iq двигателя падает, а величина сигнала ΔIq разности тягового тока на выходе блока 7 вычитания становится большей. В результате этого происходит соответствующее срабатывание регулятора 81 тока блока 8 оценки или задания расчетного значения предполагаемой скорости вращения двигателя, и расчетное значение Fr скорости вращения двигателя становится большим. Таким образом, при пробуксовке колес и увеличении скорости вращения двигателя происходит и соответствующее увеличение расчетного значения Fr скорости вращения двигателя, по изменению которого можно, как очевидно, зафиксировать сам факт пробуксовки колес. Зафиксировав таким путем по изменению расчетного значения Fr скорости вращения двигателя пробуксовку колес, контроллер 10, который в условиях пробуксовки и проскальзывания колес осуществляет путем соответствующего регулирования создание условий для повторного сцепления колес с рельсами, меняет величину конечного сигнала Iq** управления тяговым током, снижая ее до минимума, и тем самым устраняет пробуксовку колес, создавая условия для их повторного сцепления с рельсами.
На фиг. 6 показана схема одного из вариантов выполнения контроллера 10, который в условиях пробуксовки и проскальзывания колес осуществляет путем соответствующего регулирования создание условий для повторного сцепления колес с рельсами и который выполнен в соответствии с идеей, лежащей в основе настоящего изобретения. В состав контролера 10 входит устройство для расчета изменения во времени значения предполагаемой скорости вращения электродвигателя, задаваемого блоком задания расчетного значения предполагаемой скорости, которое на фиг. 6 представлено дифференцирующим элементом 101, который вычисляет время, в течение которого происходит изменение расчетного значения Fr скорости вращения двигателя. Позицией 102 на схеме обозначен детектор пробуксовки, который фиксирует наличие пробуксовки по превышению выходным сигналом дифференцирующего элемента 101 заданной величины и при возникновении пробуксовки открывается и выдает сигнал, равный (1). Если после пробуксовки и открытия детектора пробуксовки выходной сигнал дифференцирующего элемента 101 падает и становится меньше заданной величины, то детектор пробуксовки, фиксирующий ее окончание, закрывается и выдает сигнал, равный (0). Позицией 103 на схеме обозначен формирователь формы сигнала, выходной сигнал которого при открытии детектора пробуксовки и соответствующем сигнале на входе увеличивается с заданной скоростью (до 1), а затем при закрытии детектора пробуксовки уменьшается с заданной скоростью до 0 и остается в дальнейшем равным 0.
При возникновении пробуксовки и ее фиксировании контроллер 10, который в условиях пробуксовки и проскальзывания колес осуществляет посредством соответствующего регулирования создание условий для повторного сцепления колес с рельсами, выдает сигнал ΔIq*, который снижает до минимума величину конечного сигнала Iq** управления тяговым током, в результате чего колеса перестают буксовать и повторно сцепляются с рельсами. При повторном сцеплении колес с рельсами выходной сигнал ΔIq* контроллера постепенно восстанавливается до прежнего уровня с соответствующим увеличением крутящего момента приводного двигателя. В рассмотренной выше схеме уменьшение величины конечного сигнала управления тяговым током происходило по имеющему определенную форму выходному сигналу формирователя 103 формы сигнала, однако вместо этого тяговый ток двигателя можно уменьшить и по времени изменения расчетного значения Fr скорости вращения двигателя.
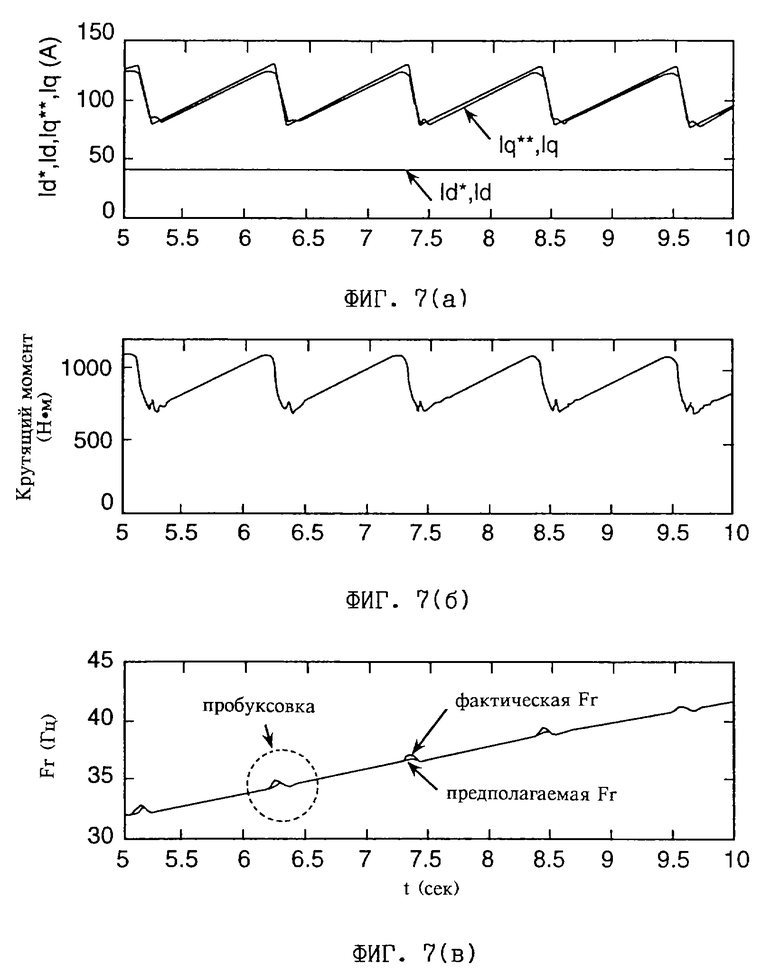
На фиг. 7а, 7б и 7в представлены результаты, полученные при моделировании на устройстве управления, схема которого показана на фиг. 1, с показанным в виде схемы на фиг. 6 контроллером 10, который при пробуксовке осуществляет посредством соответствующего регулирования создание условий для повторного сцепления колес с рельсами. Графики, которые показаны на фиг. 7а, 7б и 7в, аналогичны графикам, показанным на фиг. 5. При моделировании предполагалось, что превышение моментом двигателя заданной величины происходит при падении усилия сцепления колеса с рельсом и возникновении пробуксовки.
Как показано на фиг. 7а, 7б и 7в, при возникновении пробуксовки тяговый ток падает, а наличие пробуксовки определяется в контроллере 10, который при пробуксовке осуществляет посредством соответствующего регулирования создание условий для повторного сцепления колес с рельсами, по времени изменения величины расчетной скорости вращения сверх определенного предела с соответствующим снижением тягового тока. После этого составляющая тягового тока вновь увеличивается и достигает начального значения, что является свидетельством эффективности работы контроллера и повторного сцепления колес с рельсами. При моделировании в процессе разгона состава режим пробуксовки колес периодически повторялся пять раз и ни разу не было отмечено значительного отклонения фактической скорости двигателя от расчетной, что подтверждает эффективность предлагаемой системы регулирования с точки зрения создания условий для повторного (после пробуксовки) сцепления колес с рельсами.
Полученные при моделировании результаты свидетельствуют о том, что предлагаемое в настоящем изобретении устройство управления обеспечивает при установлении факта пробуксовки колес по происходящему при пробуксовке изменению расчетного значения скорости вращения двигателя необходимое регулирование привода и создание условий для повторного сцепления колес с рельсами без всякого измерения скорости вращения двигателя.
В рассмотренных выше вариантах речь шла об устройстве управления асинхронным электродвигателем, работающим от инвертора с векторной системой регулирования, и в этой связи следует отметить, что этим вариантом настоящее изобретение не ограничивается и может использоваться в других, не имеющих датчика скорости системах управления, в которых для определения расчетом или оценки предполагаемой скорости вращения двигателя используется выходной сигнал регулятора тока, по которому регулируется мгновенное значение выходного тока инвертора.
Кроме того, в рассмотренных выше вариантах настоящего изобретения речь шла об устройстве управления электрическим подвижным составом, движущимся по железнодорожной колее, однако и этим вариантом объем изобретения не ограничен, которое позволяет добиться такого же эффекта при использовании предлагаемого в нем устройства управления, например, в дорожных транспортных средствах с электрическим приводом.
В соответствии с настоящим изобретением, которое исключает необходимость в непосредственном измерении скорости вращения двигателя, эффективное управление двигателем с переменной скоростью вращения осуществляется регулированием инвертора по определяемой расчетом скорости вращения двигателя. В частности, даже при остановке инвертора в процессе движения электрического подвижного состава и его повторном включении скорость вращения двигателя можно оценить или определить расчетом конструктивно простыми средствами, обеспечив при этом посредством соответствующего регулирования возможность плавного ускорения/торможения состава. При возникновении пробуксовки или проскальзывания предлагаемое в изобретении устройство управления позволяет посредством регулирования на основе определяемой расчетом скорости вращения двигателя сигнала задания тока обеспечить необходимое регулирование привода и создание условий для повторного сцепления колес с рельсами. При этом такое регулирование привода и создание условий для повторного сцепления колес с рельсами не зависит от фактической скорости вращения двигателя, что исключает вероятность ошибочного определения факта пробуксовки или проскальзывания из-за возможных погрешностей в определении скорости вращения двигателя внешним датчиком скорости и позволяет улучшить связанные со сцеплением колес с рельсами характеристики привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТИ | 1998 |
|
RU2209502C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ С ЭЛЕКТРОПРИВОДОМ (ВАРИАНТЫ) | 2000 |
|
RU2192974C2 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1997 |
|
RU2193814C2 |
| Электрическая передача переменного тока тягового транспортного средства с микропроцессорной системой управления | 2019 |
|
RU2729767C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРОМАГНИТНОЙ ПОДВЕСКОЙ И ПОДВИЖНОЙ СОСТАВ С ЭЛЕКТРОМАГНИТНОЙ ПОДВЕСКОЙ | 1989 |
|
RU2048310C1 |
| СПОСОБ УПРАВЛЕНИЯ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ, КОНТРОЛЛЕР И ЖЕЛЕЗНОДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2020 |
|
RU2804825C2 |
| Устройство для автоматического регулирования частоты вращения тяговых двигателей электроподвижного состава | 1982 |
|
SU1013316A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРИВОДНОГО И/ИЛИ ТОРМОЗНОГО УСИЛИЯ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ПОДВИЖНОГО СОСТАВА БЕЗ СВОБОДНЫХ ОСЕЙ В ОБЛАСТИ ГРАНИЧНОГО СЦЕПЛЕНИЯ КОЛЕС С РЕЛЬСАМИ | 1995 |
|
RU2105679C1 |
| ЗАДАЮЩИЙ РЕГУЛЯТОР | 2000 |
|
RU2183569C2 |
| Устройство для регулирования тяговых электродвигателей электроподвижного состава | 1987 |
|
SU1512824A1 |
Изобретение относится к электрооборудованию транспортных средств. Технический результат заключается в повышении эффективности управления за счет исключения тахометра, измеряющего скорость вращения приводного электрического двигателя и создания необходимых для движения электрического подвижного состава условий для повторного сцепления колес с рельсами. В предлагаемом устройстве управления имеется инвертор, регулирующий электрический двигатель, приводящий в движение электрический подвижной состав, блок задания расчетного значения предполагаемой скорости вращения электродвигателя и устройство регулирования, которое управляет работой инвертора на основе значений скорости, задаваемой устройством задания расчетного значения предполагаемой скорости вращения электродвигателя, при этом в блоке задания расчетного значения предполагаемой скорости вращения электродвигателя для задания расчетного значения скорости вращения электродвигателя используется сигнал скорости электрического подвижного состава или измеренный тахометром или датчиком ускорения сигнал. Кроме того, в предполагаемом устройстве управления имеется контроллер, который при пробуксовке и проскальзывании осуществляет создание условий для повторного сцепления колес с рельсами посредством регулирования сигнала задания тока, определяя по величине расчетного значения предполагаемой скорости вращения наличие пробуксовки или проскальзывания колес электрического подвижного состава. 4 с. и 9 з.п.ф-лы, 7 ил.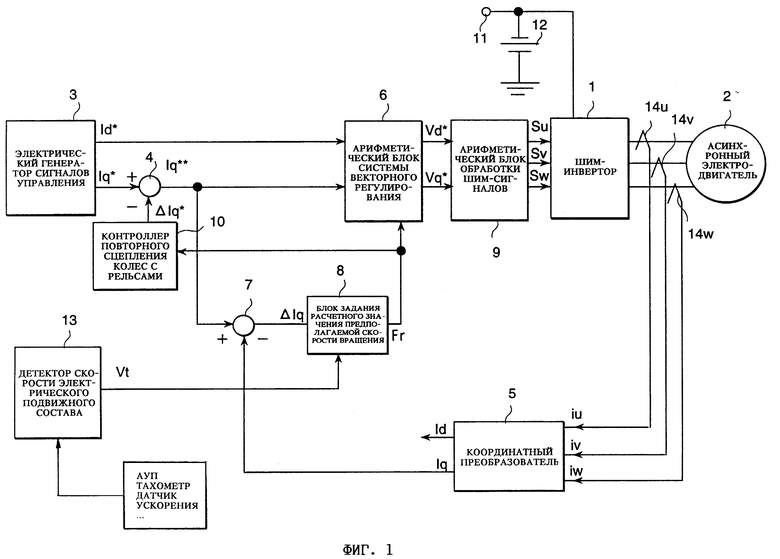
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 1992 |
|
RU2036808C1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| DE 3737633 A1, 19.05.1988. | |||
