Изобретение может быть использовано на контейнерных площадках железной дороги, на контейнерных площадках грузовых терминалов в морском порту, на контейнерных площадках крупных складов предприятия и т.д., то есть везде, в любых ситуациях, когда требуется автоматизированным способом вывести грузоподъемный механизм в заданную координату расположения груза (продукции, контейнера).
В уровне техники известна система позиционирования грузоподъемного крана и контейнеров на контейнерной площадке, описанная в а.с. SU 579650, которая предназначенная для автоматического определения местоположения (координаты) грузоподъемного крана с целью автоматического вывода грузоподъемного механизма крана на требуемую координату. Эта система позволяет сократить потери времени на осуществление операции поиска контейнера на контейнерной площадке при его погрузке-разгрузке. Эта известная система содержит датчики местоположения и считывающие устройства, установленные на кране и соединенные с бортовым компьютером кабины крана, который соединен с панелью ввода информации и с табло крана. Бортовой компьютер через блок управления перемещением управляет исполнительным блоком, т.е. работой двигателей, а посредством канала связи взаимодействует с центром управления.
В известной в уровне техники заявке DE 2352176 описано устройство для перегрузки контейнеров, содержащее датчики местоположения, установленные на контейнерной площадке по осям Х и Y и в вертикальной плоскости по оси Z, при этом датчики, установленные вдоль осей X, служат для управления перемещением грузоподъемного крана, по оси Y - для управления перемещением грузозахватного органа грузоподъемного крана, а по оси Z - для определения высоты установки контейнера. В этом известном устройстве предусмотрено, что считывающие устройства СYх, СYу и CYz установлены на опоре крана, на его тельфере и на грузозахватном органе соответственно. Система снабжена тремя двигателями Дх, Дy, Дz, обеспечивающими необходимое перемещение грузозахватного органа по направлениям X, Y и Z.
В известном в уровне техники патенте FR 2540087 описано устройство для автоматического управления операциями по перемещению грузов на площадке складирования (контейнерной площадке). Это известное устройство содержит бортовой компьютер, который управляет двигателями перемещения грузозахватного органа грузоподъемного крана по соответствующим осям в зависимости от информации, поступающей с датчиков местоположения. Бортовой компьютер связан с Центром управления посредством радиоканала.
Все эти известные в уровне техники системы обеспечивают автоматизированное позиционирование грузоподъемного крана на контейнерной площадке, а также грузозахватного механизма этого крана, обеспечивая определенные удобства при эксплуатации, связанные с погрузкой-разгрузкой грузов (контейнеров), однако обладают и недостатками, которые связаны прежде всего с тем, что ни в одном из них не предусмотрены средства, позволяющие при погрузке-разгрузке одновременно производить идентификацию контейнера (груза), ни в одном из них не предусмотрена возможность расчета кривой разгона и торможения крана из условия обеспечения минимального раскачивания контейнера при наличии груза на грузозахватном органе и без него. Это ухудшает удобства эксплуатации известных в уровне техники систем.
Все эти известные в уровне техники устройства являются аналогами изобретения, и его формула составлена с их учетом, но без разделения на ограничительную и отличительную части.
Технически результатом изобретения является повышение удобства эксплуатации, а также расширение функциональных возможностей за счет обеспечения возможности автоматической идентификации контейнеров и учета их перемещения на контейнерной площадке при осуществлении позиционирования грузоподъемного крана и контейнеров на контейнерной площадке в процессе погрузки-разгрузки.
Этот технический результат обеспечивается за счет того, что автоматизированная система позиционирования грузоподъемного крана и контейнеров на контейнерной площадке включает идентификацию контейнеров и учет их перемещения, условную разбивку горизонтальной плоскости контейнерной площадки на отдельные посадочные места с помощью отметок в виде условных линий, параллельных осям Х и Y, при этом ось Х определяется как условная линия, проходящая вдоль крайней кромки контейнерной площадки, а ось Y определяется как условная линия, проходящая поперек крайней кромки контейнерной площадки. Вдоль оси Х установлены датчики местоположения, показания которых используются для перемещения грузоподъемного крана, вдоль оси Y установлены датчики местоположения, показания которых используются для перемещения грузозахватного органа грузоподъемного крана, причем датчики местоположения установлены вдоль осей Х и Y таким образом, что центр каждого посадочного места определяется как точка, полученная от пересечения условных линий, проведенных от координат X, Y каждого датчика местоположения. Вдоль оси Z, направленной соответственно вертикально вверх относительно горизонтальной плоскости контейнерной площадки, установлены датчики местоположения, показания которых используются для определения высоты установки контейнеров. Для считывания информации с датчиков местоположения в системе предусмотрены считывающие устройства: считывающее устройство СYх, установленное на опоре крана, считывающее устройство СYy установленное на тельфере крана и считывающее устройство CYz, установленное на грузозахватном органе крана. Все считывающие устройства соединены проводным или радиоканалом через устройство сопряжения с бортовым компьютером, который подключен к панели ввода информации и к табло крана, бортовой компьютер имеет также связь с центром управления и через блок управления управляет работой соответствующих двигателей Дх, Ду и Дz грузозахватного органа крана, кроме того, по осям Х и Y между основными датчиками местоположения установлены дополнительные датчики местоположения для обеспечения плавного выхода крана и его грузозахватного органа на заданную координату, грузозахватный орган снабжен датчиком наличия груза, который подключен к бортовому компьютеру для расчета кривой разгона и торможения крана при условии обеспечения минимального раскачивания контейнера, считывающие устройства выполнены с возможностью считывания информации с кодовых бортовых датчиков и пломб запорно-пломбировочных устройств, которыми снабжен каждый контейнер, и передачи этой информации в бортовой компьютер, откуда эта информация при необходимости передается в Центр управления. Бортовой компьютер размещен в кабине крана и подключен к табло, выполненному с возможностью визуализации опорной электронной системы координат ХY контейнерной площадки, отслеживания перемещения крана и его подъемного механизма в процессе позиционирования. Каждый датчик местоположения включает последовательно соединенные задающий генератор, формирующий заданную тактовую частоту, кодер, содержащий информацию, заносимую однократно с помощью внешнего программатора и сформированную в виде цифровой последовательности, модулятор, передающий полученную информацию в излучающую антенну. Каждое считывающее устройство включает принимающую антенну, СВЧ приемник, СВЧ передатчик, блок обработки информации и выполнено с возможностью излучения высокочастотного зондирующего сигнала через радиомодем или по проводам в бортовой компьютер.
Предпочтительно, чтобы считывание информации со всех датчиков местоположения с помощью считывающих устройств осуществлялось дистанционно с расстояния до 3 м.
Предпочтительно, чтобы считывающие устройства и датчики местоположения работали на частоте f=850-900 МГц, или f=2400-2450 МГц.
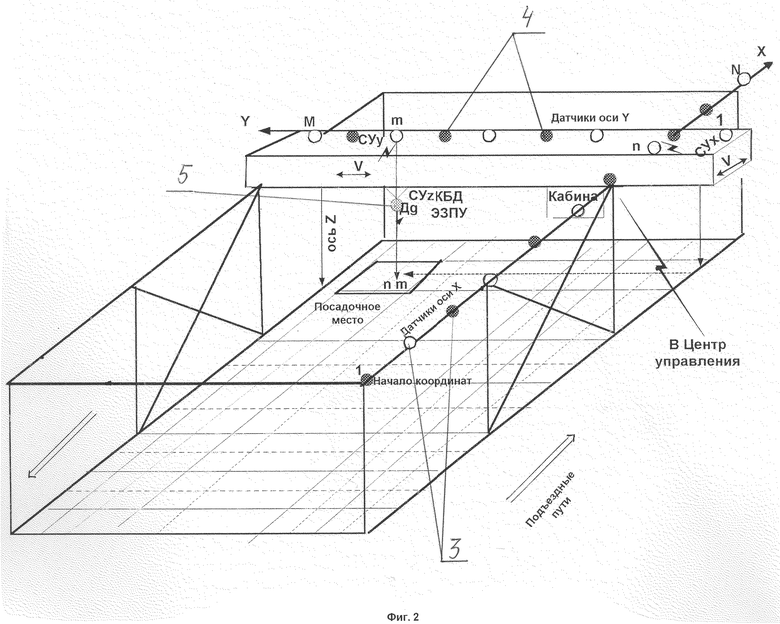
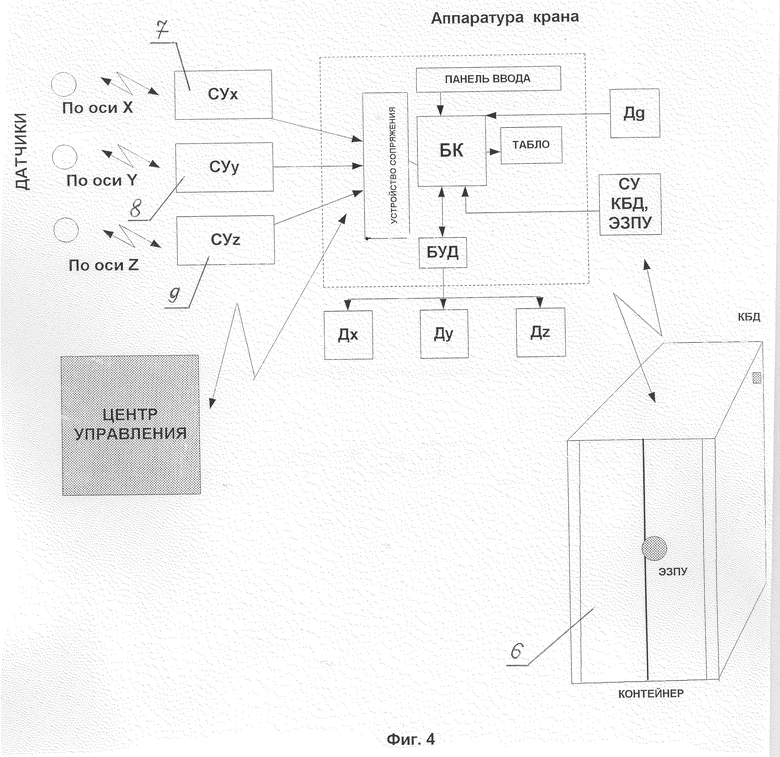
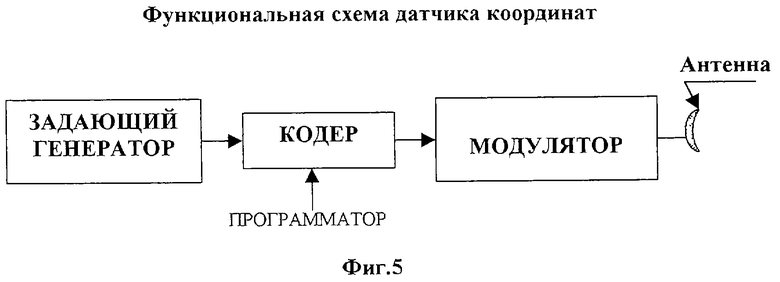
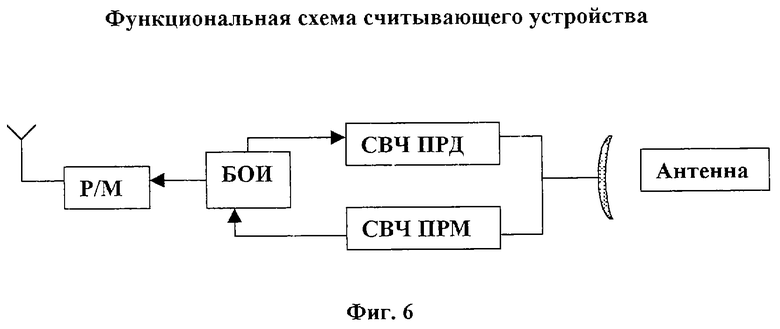
Изобретение поясняется с помощью графических материалов, где на фиг.1 показана опорная система координат ХY для позиционирования крана и его грузоподъемного механизма на контейнерной площадке, соответствующая ее электронной версии на табло, связанном с бортовым компьютером, на фиг.2 показана схема размещения датчиков местоположения на контейнерной площадке и считывающих устройств на мостовом кране, на фиг.3 показана схема размещения датчиков местоположения на контейнерной площадке и считывающих устройств на козловом кране, на фиг.4 показана функциональная схема системы позиционирования крана на контейнерной площадке, фиг.5 показана функциональная схема датчика местоположения, на фиг.6 показана функциональная схема считывающего устройства.
Автоматизированная система позиционирования грузоподъемного крана и контейнеров на контейнерной площадке включает условную разбивку горизонтальной плоскости контейнерной площадки на отдельные посадочные места 1 с помощью отметок 2 с виде условных линий, параллельных осям Х и Y, при этом ось Х определяется как условная линия, проходящая вдоль крайней кромки контейнерной площадки, а ось Y определяется как условная линия, проходящая поперек крайней кромки контейнерной площадки. Вдоль оси Х установлены датчики местоположения 3, показания которых используются для перемещения грузоподъемного крана. Вдоль оси Y установлены датчики местоположения 4, показания которых используются для перемещения грузозахватного органа грузоподъемного крана. На фиг. 1 показано, что датчики местоположения 3 и 4 установлены вдоль осей Х и Y таким образом, что центр каждого посадочного места 1 определяется как точка, полученная от пересечения условных линий, проведенных от координат X, Y каждого соответствующего датчика местоположения. Вдоль оси Z, направленной соответственно вертикально вверх относительно горизонтальной плоскости контейнерной площадки, установлены датчики местоположения 5, показания которых используются для определения высоты установки контейнеров 6. Для считывания информации с датчиков местоположения 3, 4, 5 в системе предусмотрены считывающие устройства: считывающее устройство СYх 7, установленное на опоре крана, считывающее устройство СYу 8, установленное на тельфере крана, и считывающее устройство СYz 9, установленное на грузозахватном органе крана. Все считывающие устройства соединены проводным или радиоканалом через устройство сопряжения с бортовым компьютером, который подключен к панели ввода информации и к табло крана. Бортовой компьютер имеет также связь с центром управления и через блок управления управляет работой соответствующих двигателей Дх, Дy и Дz грузозахватного органа крана, кроме того, по осям Х и Y между основными датчиками местоположения установлены дополнительные датчики местоположения для обеспечения плавного выхода крана и его грузозахватного органа на заданную координату, грузозахватный орган снабжен датчиком наличия груза, который подключен к бортовому компьютеру для расчета кривой разгона и торможения крана при условии обеспечения минимального раскачивания контейнера, считывающие устройства выполнены с возможностью считывания информации с кодового бортового датчика и пломбы запорно-пломбировочного устройства, которыми снабжен каждый контейнер, и передачи этой информации в бортовой компьютер, откуда эта информация при необходимости передается в Центр управления, бортовой компьютер размещен в кабине крана и подключен к табло, выполненному с возможностью визуализации опорной электронной системы координат ХУ контейнерной площадки, отслеживания перемещения крана и его подъемного механизма в процессе позиционирования, при этом каждый датчик местоположения включает последовательно соединенные задающий генератор, формирующий заданную тактовую частоту, кодер, содержащий информацию, заносимую однократно с помощью внешнего программатора и сформированную в виде цифровой последовательности, модулятор, передающий полученную информацию в излучающую антенну, каждое считывающее устройство включает принимающую антенну, СВЧ-приемник, СВЧ-передатчик, блок обработки информации и выполнено с возможностью излучения высокочастотного зондирующего сигнала через радиомодем или по проводам в бортовой компьютер.
Предпочтительно, чтобы считывание информации со всех датчиков местоположения с помощью считывающих устройств осуществлялось дистанционно с расстояния до 3-х метров.
Предпочтительно, чтобы считывающие устройства и датчики местоположения работали на частоте f=850-900 МГц или f=2400-2450 МГц.
Осуществление изобретения поясняется на примере контейнерной площадки, схематически изображенной на фиг. 1-3 графических материалов. Вся контейнерная площадка разбивается на отдельные посадочные места 1, соответствующие габаритам контейнера 6 минимальной грузоподъемности 3,0 т. При необходимости установить контейнер 6 большей грузоподъемности (объема), например, 5 т, предусматривают два посадочных места 1. Аналогично поступают в случае установки большегрузных контейнеров на 10,0 т и 20,0 т.
Вдоль контейнерной площадки по оси X, вдоль которой перемещается грузоподъемный кран, устанавливаются датчики местоположения 3, в каждом из которых содержится информация об одной из координат (х) местоположения соответствующего контейнера. По оси Y, в направлении которой предусмотрено перемещение грузозахватного органа грузоподъемного крана, устанавливаются датчики местоположения 4, в каждом из которых содержится информация о второй координате (у) местоположения соответствующего контейнера. При необходимости могут быть установлены и датчики местоположения 5 по оси Z, предназначенные для определения высоты установки или высоты подъема соответствующего контейнера 6. Для бесконтактного съема информации о координатах соответствующего контейнера 6 на опоре крана и на его тельфере устанавливаются считывающие устройства СYх, СYу и СYz 7-9, которые при движении крана 1 излучают высокочастотный зондирующий сигнал. При попадании в зону действия соответствующего считывающего устройства 7-9 соответствующий электронный датчик местоположения 3-5 принимает его сигнал, модулирует в соответствии с заложенным в его памяти кодом координаты местоположения контейнера 6 и излучает модулированный по фазе либо по амплитуде сигнал обратно. Считывающее устройство принимает модулированный сигнал, демодулирует и дешифрирует его и по проводному или радиоканалу передает в бортовой компьютер, где информация высвечивается на табло и используется в системе управления краном для вывода его и его грузозахватного органа в заданную точку координат. Номер считанного датчика указывает положение крана на оси X. Аналогичную процедуру необходимо выполнить и по линии балки в случае использования козлового крана, либо по линии рельсового перемещения грузоподъемного механизма (для мостового крана). Для установки считывающего устройства на грузозахватном органе крана могут быть использованы кронштейны. Номер считанного соответствующего датчика местоположения Ду будет указывать на положение грузозахватного органа крана по оси Y. Пересечение определенных в результате считывания соответствующих осей указывает на номер посадочного места контейнерной площадки, над которым находится грузозахватный механизм крана.
В соответствии с изображением, показанным на фиг.5, датчик местоположения включает последовательно соединенные задающий генератор, формирующий заданную тактовую частоту, и кодер, содержащий информацию, заносимую однократно с помощью внешнего программатора, модулятор, передающий полученную информацию в излучающую антенну. А считывающее устройство, как изображено на фиг. 6, включает принимающую и передающую антенны, СВЧ-приемник, СВЧ-передатчик, блок обработки информации и выполнено с возможностью излучения высокочастотного зондирующего сигнала по радиоканалу или по проводам в бортовой компьютер. Узел модулятора может быть реализован на двух СВЧ-диодах с малой емкостью и высоким быстродействием в диапазонах частот 900 МГц и 2450 МГц. Рабочая точка диодов выбрана при нулевом напряжении, при этом прямой ток через диоды не протекает (ток утечки менее 1 мкА), а изменяется лишь емкость запертого p-n перехода, что приводит к перестройке частоты настойки антенны. Перестройка осуществляется в соответствии с цифровым кодом антенны, который генерируется кодером, и приводит к перестройке фазы пере излученной энергии СВЧ-излучения. Антенна представляет собой укороченный диполь, настроенный на рабочую частоту 867 МГц со средней емкостью СВЧ-диодов.
Одновременное считывание считывающим устройством двух датчиков местоположения Дх указывает на положение крана в центре посадочного места контейнерной площадки. Можно расширить информационные функции датчиков местоположения, установив дополнительные датчики местоположения по линии внешних границ посадочных мест. Информацию от этих дополнительных датчиков можно использовать для оптимизации параметров движения крана (начала движения, торможения, остановки, перемещения от одного посадочного места к другому и т. п. ). Все эти задачи могут быть решены с использованием бортового компьютера с учетом технологии работы конкретной контейнерной площадки и конкретного алгоритма погрузочно-разгрузочных работ.
На фиг. 4 приведена функциональная схема системы позиционирования крана на контейнерной площадке. Рассмотрим работу этой системы. Из Центра управления, в котором осуществляется планирование работы крана, в Бортовой компьютер через устройство сопряжения по радиоканалу поступает очередная команда: "с такой-то координаты взять-поставить контейнер. Бортовой компьютер крана, получая информацию со считывающих устройств СYх, СYу, всегда знает свое местоположение и положение грузозахватного органа, которое высвечивается на табло и хранится в памяти бортового компьютера. По команде крановщика Бортовой компьютер определяет направление перемещения крана и его грузозахватного органа, выдает через блок управления двигателями крана команды на двигатели Дх, Дy. При перемещении крана бортовой компьютер постоянно сравнивает текущее местоположение крана с полученным заданием. При их совпадении дается команда на остановку двигателей Дх, Ду и начинается работа двигателя Дz по подъему или опусканию контейнера. Для оптимизации работы двигателей крана Дх, Ду при выходе на заданную координату учитываются координаты и дополнительных датчиков местоположения, расположенных на границах посадочных мест. Это позволит своевременно дать команду на торможение двигателей, что обеспечивает плавный выход на заданную координату. Кривая разгона и торможения крана в большой степени зависит от наличия или отсутствия груза на грузозахватном органе. Поскольку грузозахватный орган снабжен датчиком наличия груза, от него информация о наличии или отсутствии груза на грузозахватном органе поступает в бортовой компьютер, что позволяет рассчитывать кривую разгона и торможения крана из условия обеспечения минимального раскачивания контейнера.
Таким образом, изобретение в представленной совокупности признаков, каждый из которых выполняет свою функцию, а вместе, во взаимосвязи, они решают поставленную задачу, т. е. обеспечивают удобства в эксплуатации, связанные как с точным и плавным перемещением крана и его грузозахватного органа в заданную точку контейнерной площадки, так и с возможностью одновременно производить идентификацию перемещаемых контейнеров и их учет.

Изобретение может быть использовано на контейнерных площадках железной дороги, грузовых терминалов в морском порту, на контейнерных площадках складов предприятия и т.д. По осям Х и Y между основными датчиками местоположения установлены дополнительные датчики местоположения для обеспечения плавного выхода крана и его грузозахватного органа на заданную координату. Грузозахватный орган снабжен датчиком наличия груза, который подключен к бортовому компьютеру для расчета кривой разгона и торможения крана при условии обеспечения минимального раскачивания контейнера. Считывающие устройства выполнены с возможностью считывания информации с кодовых бортовых датчиков и пломб запорно-пломбировочных устройств, которыми снабжены контейнеры, и передачи этой информации в бортовой компьютер, откуда эта информация при необходимости передается в Центр управления. Каждый датчик местоположения включает последовательно соединенные задающий генератор, кодер, модулятор. Каждое считывающее устройство выполнено с возможностью излучения высокочастотного зондирующего сигнала через радиомодем или по проводам в бортовой компьютер. Техническим результатом изобретения является повышение удобства в эксплуатации, а также расширение функциональных возможностей. 2 з. п.ф-лы, 6 ил.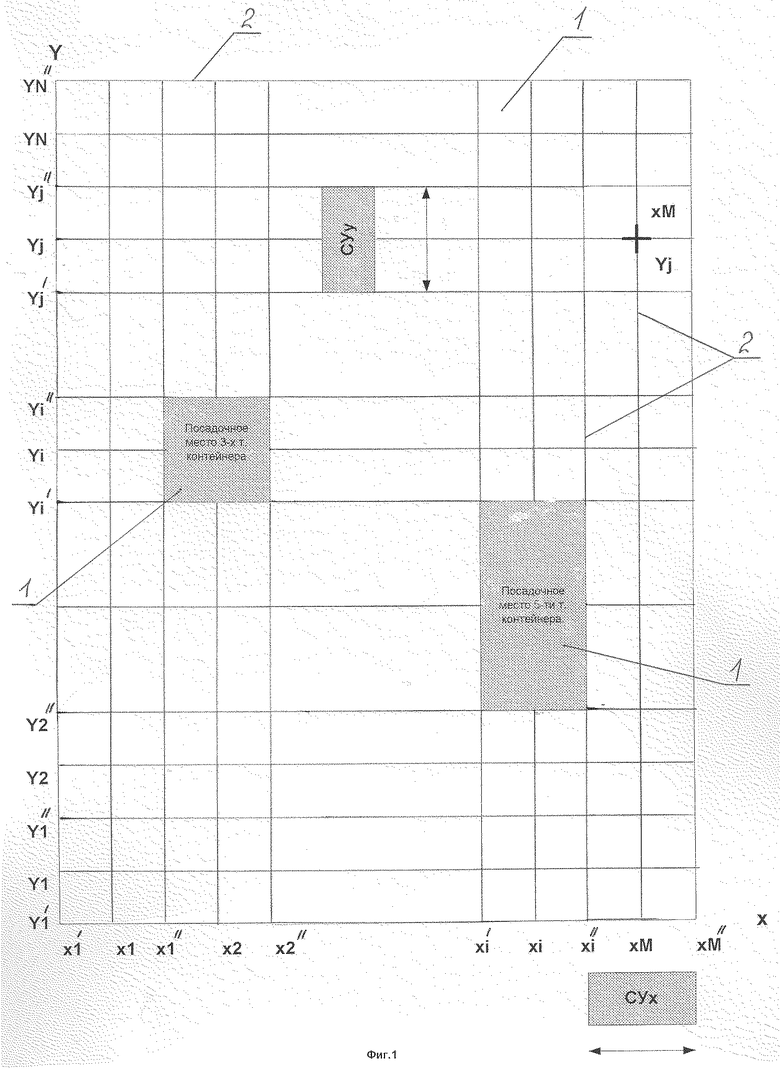
| СПОСОБ ВЫРАБОТКИ КОНСЕРВОВ "СИЧЕНИКИ РЫБНЫЕ УКРАИНСКИЕ" | 2007 |
|
RU2352176C1 |
| СПОСОБ ПОЛУЧЕНИЯ 1-АЗИДО-2-ЭТИЛ-1,2-ДИГИДРО(С-I)[5,6]ФУЛЛЕРЕНА | 2013 |
|
RU2540087C2 |
| US 6496765 B1, 17.12.2002 | |||
| US 6421627 B1, 06.07.2002 | |||
| МАНИПУЛЯТОР-ПЛАТФОРМА | 1995 |
|
RU2093344C1 |
| US 4068232 A, 10.01.1978 | |||
| НОСИТЕЛЬ ДАННЫХ ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1994 |
|
RU2137161C1 |
| US 6061614 A1, 09.05.2000 | |||
| СПОСОБ ОЦЕНКИ СТЕПЕНИ РИСКА РАЗВИТИЯ ДИСФУНКЦИИ МАЛЫХ ДЫХАТЕЛЬНЫХ ПУТЕЙ У ПАЦИЕНТОВ С БРОНХИАЛЬНОЙ АСТМОЙ НА РАННИХ СТАДИЯХ | 2020 |
|
RU2741858C1 |

