Изобретение относится к области машиностроения и может быть использовано при создании мобильных микророботов, манипулирующих с плоскими деталями.
Известен схват манипулятора, содержащий корпус с пневмокамерой, стенка которой имеет сквозные каналы, вакуумные присоски, установленные на выходе каналов с наружной поверхности стенки пневмокамеры и упругими оболочками, герметично установленными на выходе каналов с внутренней поверхности стенки пневмокамеры [Авторское свидетельство СССР 1178588, кл. В 25 J 5/06, 1985].
Недостатком данного устройства является использование внешнего источника вакуума, что приводит к большим габаритам конструкции и не позволяет использовать данное устройство в системах манипулирования мобильных микророботов.
Известен также вакуумный захват, содержащий сопло с плоским торцом и опоры, высота которых соответствует соотношению h=(2-4)•10-8•D7/2, где h - высота опоры, мм; D - диаметр плоского торца сопла, мм [Авторское свидетельство СССР 1390022, кл. В 25 J 15/06, 1988].
Недостатком данного устройства также является использование внешнего источника вакуума и, как следствие, большие габариты конструкции, что не позволяет использовать данное устройство в системах манипулирования мобильных микророботов.
Наиболее близким по технической сущности к заявляемому изобретению является вакуумное захватное устройство, содержащее корпус, пневмоприсоску, привод ее перемещения, выполненный в виде силового цилиндра, конец штока которого жестко связан с пневмоприсоской, а его поршневая полость сообщена с полостью пневмоприсоски, а также источник вакуума, связанный с поршневой полостью через распределительный клапан [Авторское свидетельство СССР 1202879, кл. В 25 J 15/06, В 66 С 1/02, 1986].
Недостатком данного устройства является сложность конструкции, а также использование внешнего источника вакуума, что в свою очередь приводит к большим габаритам конструкции и не позволяет использовать данное устройство в системах манипулирования мобильных микророботов.
Задачей, на решение которой направлено заявляемое изобретение, является снижение массогабаритных показателей вакуумного захватного устройства за счет применения собственного источника вакуума.
Решение поставленной задачи достигается тем, что в вакуумном захватном устройстве, содержащем пневмоприсоску и источник вакуума, в отличие от прототипа источник вакуума выполнен собственным в виде пневматического пьезонасоса, состоящего из деформируемого элемента в виде силового пьезокристалла, и эластичного элемента конструкции, который выполнен в виде цилиндра из эластичного материала, при этом в основной полости пневматического пьезонасоса установлены первый и второй клапаны, которые представляют собой первый и второй распределительные пьезокристаллы, расположенные между основной полостью пневматического пьезонасоса и соответственно внешней полостью пневматического пьезонасоса и полостью пневмоприсоски.
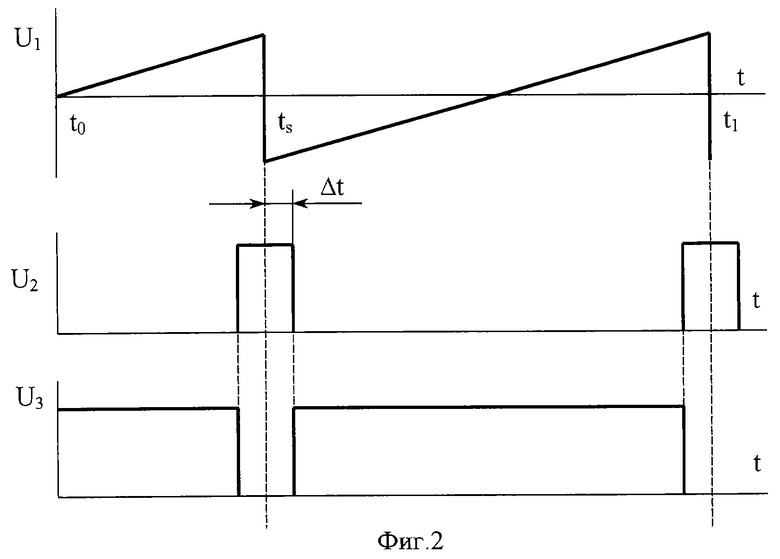
На фиг. 1 представлена конструкция вакуумного захватного устройства; на фиг.2 - временная диаграмма сигналов управления силовым и распределительными пьезокристаллами.
Вакуумное захватное устройство (фиг. 1) содержит пневмоприсоску 1 и собственный источник вакуума, выполненный в виде пневматического пьезонасоса, состоящего из деформируемого элемента, который выполнен в виде силового пьезокристалла 2, и эластичного элемента конструкции 3, который выполнен в виде цилиндра из эластичного материала, при этом основная полость 4 пневматического пьезонасоса разделена с внешней полостью 5 пневматического пьезонасоса и полостью 6 пневмоприсоски 1 соответственно первым и вторым клапаном, которые представляют собой первый 7 и второй 8 распределительные пьезокристаллы. Деталь 9 плотно прилегает к пневмоприсоске 1.
Вакуумное захватное устройство работает следующим образом.
Для захвата детали 9 используется последовательность генерации управляющих воздействий. Во-первых, это сигналы, подаваемые на первый и второй клапаны, которые представляют собой первый 7 и второй 8 распределительные пьезокристаллы. Вызванное этим сокращение размера первого распределительного пьезокристалла, тем самым, открывает и закрывает соединение основной полости 4 с внешней полостью 5 пневматического пьезонасоса, а сокращение размера второго распределительного пьезокристалла открывает и закрывает соединение основной полости 4 пневматического пьезонасоса с полостью 6 пневмоприсоски 1. Во-вторых, одновременно генерируется сигнал, вызывающий отклонение деформируемого элемента, выполненного в виде силового пьезокристалла 2, в сторону, определяемую полярностью сигнала, вызывая смятие (при этом, если первый клапан закрыт, в основной полости 4 пневматического пьезонасоса возникает избыточное давление) или растяжение (при этом в основной полости 4 пневматического пьезонасоса возникает разрежение, и если при этом первый клапан закрыт, а второй открыт, разрежение возникает и в полости 6 пневмоприсоски 1) эластичного элемента 3, который выполнен в виде цилиндра из эластичного материала. Процесс захвата детали 9 вакуумным захватным устройством разбивается на фазы разрежения в полости 6 пневмоприсоски 1.
Рассмотрим процесс захвата детали 9 подробнее. В течение первой фазы разрежения в период времени [t0, tS] (фиг.2) в полости 6 пневмоприсоски 1 под действием линейно изменяющегося напряжения U1 происходит изгиб силового пьезокристалла 2, что вызывает растяжение эластичного элемента 3, при этом в основной полости 4 пневматического пьезонасоса и полости 6 пневмоприсоски 1 возникает разрежение, поскольку первый клапан закрыт, а второй клапан открыт. Под действием разрежения в полости 6 пневмоприсоски 1 происходит захват детали 9. В момент времени (tS-Δt) ко второму распределительному пьезокристаллу 8 подается постоянное напряжение U2, под действием которого второй клапан закрывается, и одновременно постоянное напряжение U3 на первом распределительном пьезокристалле 7 падает, тем самым первый клапан открывается. При этом разрежение в полости 6 пневмоприсоски 1 не изменяется, а разрежение в основной полости 4 пневматического пьезонасоса падает за счет атмосферного воздуха. В момент времени tS происходит скачкообразное изменение полярности прикладываемого напряжения U1, в результате чего силовой пьезокристалл 2 изгибается в противоположную сторону, вызывая смятие эластичного элемента 3, при этом избыточное давление в основной полости 4 пневматического пьезонасоса не возникает, т.к. первый клапан открыт. В момент времени (tS+Δt) постоянное напряжение U2 на втором распределительном пьезокристалле 8 падает, тем самым второй клапан открывается, и одновременно к первому распределительному пьезокристаллу 7 подается постоянное напряжение U3, под действием которого первый клапан закрывается. В период времени [tS, t1] происходит вторая фаза разрежения в полости 6 пневмоприсоски 1, при этом разрежение в полости 6 пневмоприсоски 1, полученное на первой фазе, будет суммироваться с разрежением, полученным на второй фазе, в результате чего сила захвата детали 9 возрастет.
Величина усилия для захвата детали 9 регулируется числом фаз разрежений в полости 6 пневмоприсоски 1.
Одновременно, открыв первый и второй клапаны, можно добиться освобождения детали 9, т.к. при этом разрежение в полости 6 пневмоприсоски 1 падает за счет атмосферного воздуха.
Итак, заявляемое изобретение позволяет снизить массогабаритные показатели вакуумного захватного устройства за счет применения собственного источника вакуума.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ ВАКУУМНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРОРОБОТ | 2002 |
|
RU2205475C1 |
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОРОБОТА | 2005 |
|
RU2281197C1 |
| АВТОНОМНОЕ ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОРОБОТА | 2004 |
|
RU2266810C1 |
| ПРИВОД МИКРОМАНИПУЛЯТОРА | 2000 |
|
RU2175601C2 |
| НАНОСТРУКТУРНОЕ ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРООБЪЕКТАМИ, ИЗГОТОВЛЕННЫМИ ИЗ ЭЛЕКТРОПРОВОДНИКОВЫХ МАТЕРИАЛОВ | 2009 |
|
RU2423223C1 |
| Вакуумный захват | 2022 |
|
RU2794665C1 |
| НАНОСТРУКТУРНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОМАНИПУЛЯТОРА | 2006 |
|
RU2331505C1 |
| КАПИЛЛЯРНЫЙ МИКРОЗАХВАТ С ОБРАТНОЙ СВЯЗЬЮ | 2004 |
|
RU2261795C1 |
| МОБИЛЬНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРОРОБОТ | 1999 |
|
RU2164362C2 |
| Вакуумное захватное устройство | 1990 |
|
SU1776558A1 |
Изобретение относится к области машиностроения и может быть использовано при создании мобильных микророботов, манипулирующих с плоскими деталями. Устройство содержит пневмоприсоску и источник вакуума. В качестве источника вакуума использован собственный источник вакуума, выполненный в виде пневматического пьезонасоса, состоящего из деформируемого элемента в виде силового пьезокристалла, и эластичного элемента конструкции, который выполнен в виде цилиндра из эластичного материала. При этом в основной полости пневматического пьезонасоса установлены первый и второй клапаны, которые представляют собой первый и второй распределительные пьезокристаллы, расположенные между основной полостью пневматического пьезонасоса и соответственно внешней полостью пневматического пьезонасоса и полостью пневмоприсоски. Изобретение позволит снизить массогабаритные показатели вакуумного захватного устройства за счет применения собственного источника вакуума. 2 ил.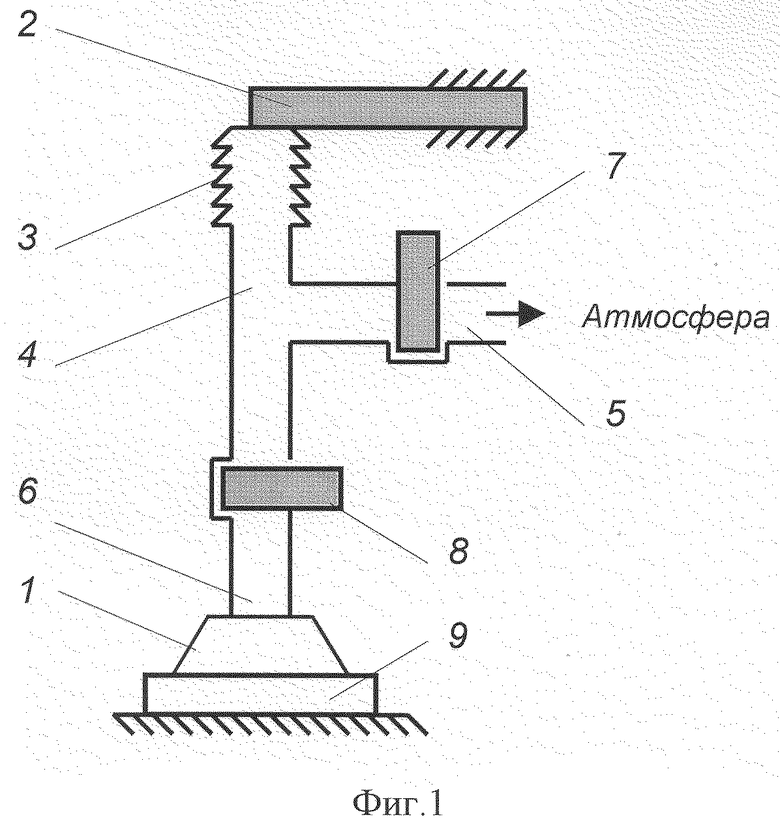
Вакуумное захватное устройство, содержащее пневмоприсоску и источник вакуума, отличающееся тем, что в качестве источника вакуума использован собственный источник вакуума, выполненный в виде пневматического пьезонасоса, состоящего из деформируемого элемента в виде силового пьезокристалла, и эластичного элемента конструкции, который выполнен в виде цилиндра из эластичного материала, при этом в основной полости пневматического пьезонасоса установлены первый и второй клапаны, которые представляют собой первый и второй распределительные пьезокристаллы, расположенные между основной полостью пневматического пьезонасоса и соответственно внешней полостью пневматического пьезонасоса и полостью пневмоприсоски.
| Вакуумное захватное устройство | 1983 |
|
SU1202879A1 |
| Схват манипулятора | 1984 |
|
SU1178588A1 |
| US 5184858, 09.02.1993. | |||

