Изобретение относится к области машиностроения и может быть использовано для прецизионного перемещения изделий по наклонным, вертикальным или потолочным поверхностям.
Известно устройство для прецизионного перемещения изделий, которое содержит: стол, направляющую, привод, выполненный в виде шести пьезокристаллов, жестко прикрепленных одними концами к столу. Пьезокристаллы связаны со столом и попарно с направляющей по структуре I-координат [авторское свидетельство СССР 1713065, кл. Н 02 N 2/00, Н 01 L 41/09, 1989].
Недостатком данного устройства является возможность позиционирования только по горизонтальным поверхностям.
Известно также устройство для прецизионного позиционирования изделий, содержащее основание, столик, пьезокристаллы, подключенные к генератору высокочастотных колебаний [авторское свидетельство СССР 864386, кл. Н 01 L 41/08, Н 02 N 11/00, 1981].
Недостатком данного устройства также является возможность позиционирования только по горизонтальным поверхностям.
Наиболее близким по технической сущности к заявляемому изобретению является мобильный пьезоэлектрический микроробот, содержащий систему микроманипулирования и подвижную платформу с приводами, выполненными в виде пьезокристаллов [авторское свидетельство РФ 2164362, кл. Н 01 L 41/09, Н 02 N 2/00, В 25 J 7/00, 2001].
Недостатком данного устройства является невозможность позиционирования по наклонным, вертикальным или потолочным поверхностям.
Задачей, на решение которой направлено заявляемое изобретение, является позиционирование по наклонным, вертикальным или потолочным поверхностям за счет применения вакуумных захватных устройств, установленных на приводе микроробота.
Решение поставленной задачи достигается тем, что в мобильном вакуумном пьезоэлектрическом микророботе, содержащем подвижную платформу с приводом, выполненным в виде основного пьезокристалла, в отличие от прототипа на концах основного пьезокристалла установлены вакуумные захватные устройства, представляющие собой пневмоприсоску и пневматический пьезонасос, состоящий из деформируемого элемента в виде силового пьезокристалла, и эластичного элемента конструкции, который выполнен в виде цилиндра из эластичного материала, при этом в основной полости пневматического пьезонасоса установлены первый и второй клапаны, которые представляют собой первый и второй распределительные пьезокристаллы, расположенные между основной полостью пневматического пьезонасоса и соответственно внешней полостью пневматического пьезонасоса и полостью пневмоприсоски.
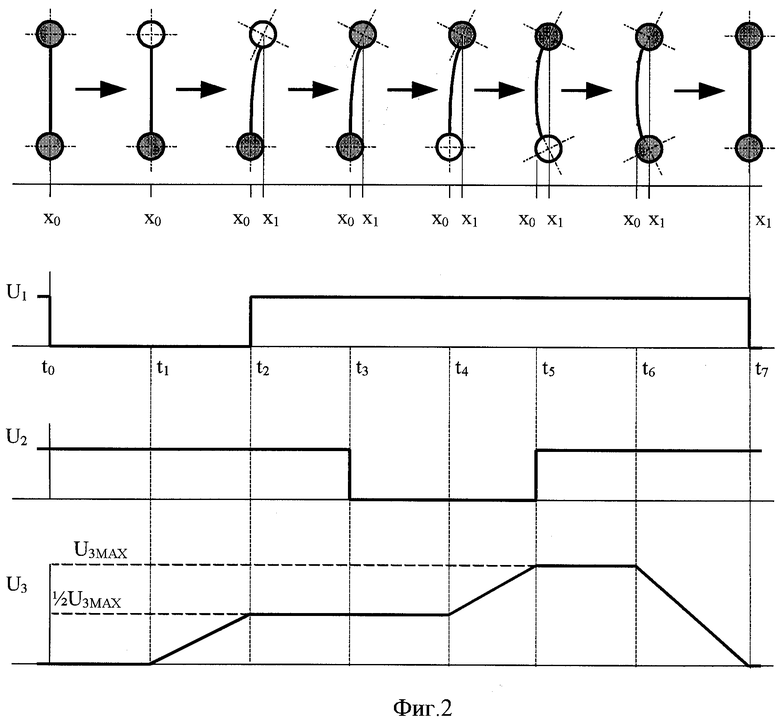
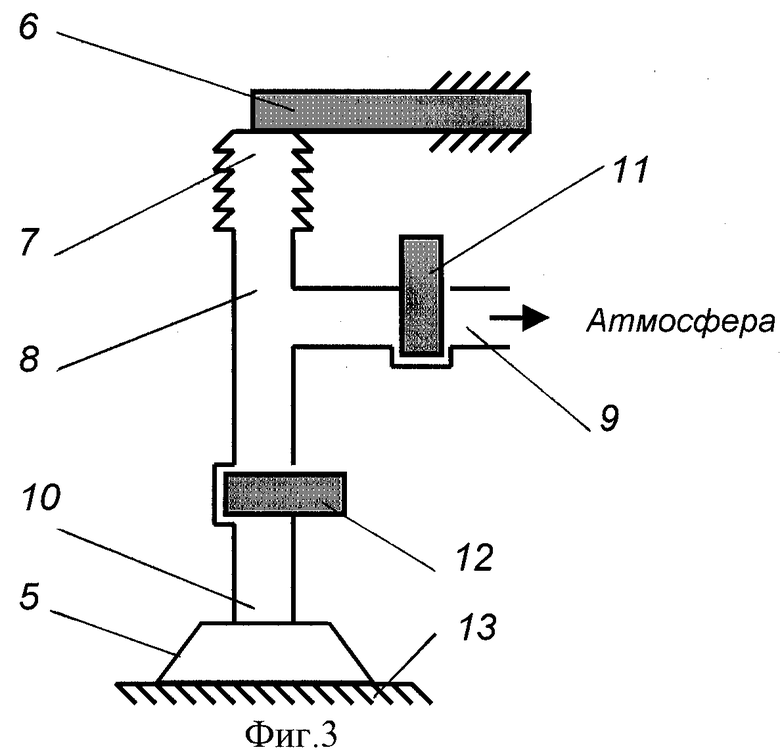
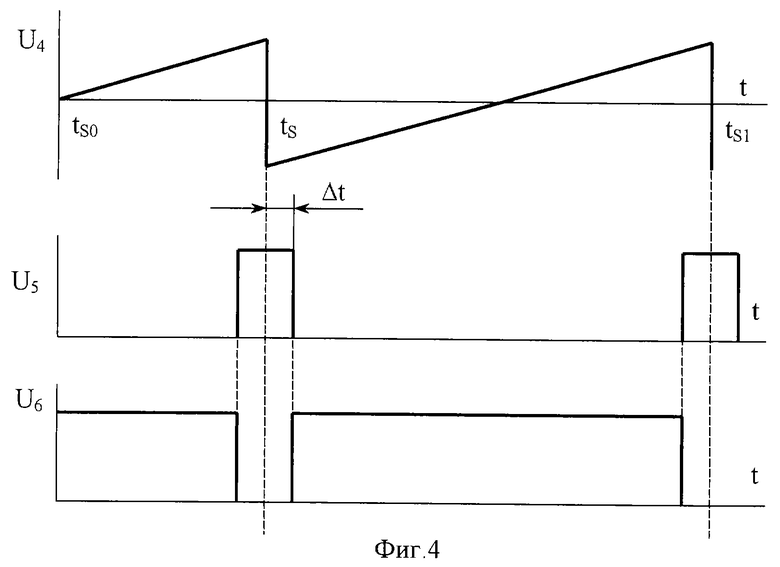
На фиг. 1а показан мобильный вакуумный пьезоэлектрический микроробот, вид сверху; на фиг. 1б - то же, вид спереди; на фиг. 2 - один из способов прямолинейного движения микроробота при выполнении одного шага; на фиг. 3 - вакуумное захватное устройство; на фиг. 4 - временная диаграмма сигналов управления силовым и распределительными пьезокристаллами вакуумного захватного устройства.
Мобильный вакуумный пьезоэлектрический микроробот (фиг. 1а, 1б) содержит подвижную платформу 1, привод в виде основного пьезокристалла 2 на концах которого установлены первый 3 и второй 4 вакуумные захватные устройства. Вакуумное захватное устройство представляет собой пневмоприсоску 5 и пневматический пьезонасос, состоящий из деформируемого элемента, который выполнен в виде силового пьезокристалла 6, и эластичного элемента конструкции 7, который выполнен в виде цилиндра из эластичного материала, при этом основная полость 8 пневматического пьезонасоса разделена с внешней полостью 9 пневматического пьезонасоса и полостью 10 пневмоприсоски 5, соответственно, первым и вторым клапанами, которые представляют собой первый 11 и второй 12 распределительные пьезокристаллы. Пневмоприсоска 5 плотно прилегает к поверхности позиционирования 13.
Мобильный вакуумный пьезоэлектрический микроробот работает следующим образом.
Последовательность управляющих напряжений позволяет основной пьезокристалл привода микроробота деформировать (укоротить, удлинить или согнуть в двух направлениях), а также обеспечить захват одним и освобождение другим вакуумным захватным устройством или одновременный захват обоими вакуумными захватными устройствами поверхности позиционирования, что позволяет реализовать шагоподобное движение и повороты подвижной платформы 1 микроробота и надежно удерживать микроробот на наклонной, вертикальной или потолочной поверхности.
Рассмотрим один из способов прямолинейного движения микроробота по наклонной, вертикальной или потолочной поверхности. В этом способе прямолинейное движение разбивается на фазы движения, на каждой фазе выполняется один шаг. Рассмотрим одну фазу движения в период времени [t0, t7] (фиг. 2). В начальный момент времени to поверхность позиционирования захвачена обоими вакуумными захватными устройствами. Если условно обозначить U1 и U2 - сигналы управления вакуумными захватными устройствами, при этом высокий уровень сигналов приводит к захвату, а низкий - освобождению поверхности позиционирования вакуумными захватными устройствами, тогда в период времени [t0, t1] под действием сигнала U1 происходит освобождение поверхности позиционирования первым вакуумным захватным устройством 3. В период времени [t1, t2] под действием линейно возрастающего напряжения U3 основной пьезокристалл 2 изгибается в направлении движения, при этом линейное перемещение свободного от захвата конца основного пьезокристалла 2 в момент времени t2 под действием напряжения 1/2U3MAX составляет 1/2Δ, где Δ - максимальное линейное перемещение свободного конца основного пьезокристалла 2 под действием напряжения u3MAX. В период времени [t2, t3] под действием сигнала U1 происходит захват поверхности позиционирования первым вакуумным захватным устройством 3. В период времени [t3, t4] под действием сигнала U2 происходит освобождение поверхности позиционирования вторым вакуумным захватным устройством 4. В период времени [t4, t5] под действием линейно возрастающего напряжения U3 основной пьезокристалл 2 изгибается еще больше в том же направлении, при этом линейное перемещение свободного от захвата конца основного пьезокристалла 2 в момент времени t5 под действием напряжения U3MAX составляет 1/2Δ. В период времени [t5, t6] под действием сигнала U1 происходит захват поверхности позиционирования вторым вакуумным захватным устройством 4. Хотя поверхность позиционирования захвачена обоими вакуумными захватными устройствами, в период времени [t6, t7] под действием линейно падающего напряжения U3 основной пьезокристалл 2 выпрямляется до нейтрального состояния, за счет того, что при выпрямлении создает силу, на порядок большую, чем сила захвата, создаваемая первым 3 и вторым 4 вакуумными захватными устройствами.
Величина перемещения микроробота при таком способе прямолинейного движения на одной фазе движения составляет 1/2Δ. Для повышения точности позиционирования вместо деформации изгиб-выпрямление можно использовать деформацию растяжение-сжатие основного пьезокристалла 2, при этом, управление перемещением микроробота будет осуществляться аналогично рассмотренному способу прямолинейного движения.
Для управления вакуумными захватными устройствами (фиг. 3) используется последовательность генерации управляющих воздействий. Во-первых, это сигналы, подаваемые на первый и второй клапаны, которые представляют собой первый 11 и второй 12 распределительные пьезокристаллы, вызванное этим сокращение размера первого распределительного пьезокристалла, тем самым, открывает и закрывает соединение основной полости 8 с внешней полостью 9 пневматического пьезонасоса, а сокращение размера второго распределительного пьезокристалла открывает и закрывает соединение основной полости 8 пневматического пьезонасоса с полостью 10 пневмоприсоски 5. Во-вторых, одновременно генерируется сигнал, вызывающий отклонение деформируемого элемента, выполненного в виде силового пьезокристалла 6 в сторону, определяемую полярностью сигнала, вызывая смятие (при этом, если первый клапан закрыт, в основной полости 8 пневматического пьезонасоса возникает избыточное давление) или растяжение (при этом в основной полости 8 пневматического пьезонасоса возникает разрежение, и если при этом первый клапан закрыт, а второй открыт, - разрежение возникает и в полости 10 пневмоприсоски 5) эластичного элемента 7, который выполнен в виде цилиндра из эластичного материала. Процесс захвата поверхности позиционирования 13 вакуумным захватным устройством разбивается на фазы разрежения в полости 10 пневмоприсоски 5. Рассмотрим процесс захвата поверхности позиционирования 13 подробнее. В течение первой фазы разрежения в период времени [tS0, tS] (фиг. 4) в полости 10 пневмоприсоски 5 под действием линейно изменяющегося напряжения U4 происходит изгиб силового пьезокристалла 6, что вызывает растяжение эластичного элемента 7, при этом в основной полости 8 пневматического пьезонасоса и полости 10 пневмоприсоски 5 возникает разрежение, поскольку первый клапан закрыт, а второй клапан открыт. Под действием разрежения в полости 10 пневмоприсоски 5 происходит захват поверхности позиционирования 13. В момент времени (tS-Δt) ко второму распределительному пьезокристаллу 12 подается постоянное напряжение U5, под действием которого второй клапан закрывается, и одновременно, постоянное напряжение U6 на первом распределительном пьезокристалле 11 падает, тем самым первый клапан открывается. При этом разрежение в полости 10 пневмоприсоски 5 не изменяется, а разрежение в основной полости 8 пневматического пьезонасоса падает за счет атмосферного воздуха. В момент времени tS происходит скачкообразное изменение полярности прикладываемого напряжения U4, в результате чего силовой пьезокристалл 6 изгибается в противоположную сторону, вызывая смятие эластичного элемента 7, при этом избыточное давление в основной полости 8 пневматического пьезонасоса не возникает, т.к. первый клапан открыт. В момент времени (tS+Δt) постоянное напряжение U5 на втором распределительном пьезокристалле 12 падает, тем самым второй клапан открывается, и одновременно, к первому распределительному пьезокристаллу 11 подается постоянное напряжение U6, под действием которого первый клапан закрывается. В период времени [tS, tS1] происходит вторая фаза разрежения в полости 10 пневмоприсоски 5, при этом, разрежение в полости 10 пневмоприсоски 5, полученное на первой фазе, будет суммироваться с разрежением, полученным на второй фазе, в результате чего сила захвата поверхности позиционирования 13 возрастет.
Величина усилия для захвата поверхности позиционирования 13 регулируется числом фаз разрежений в полости 10 пневмоприсоски 5.
Одновременно, открыв первый и второй клапаны, можно добиться освобождения вакуумным захватным устройством поверхности позиционирования 13, т.к. при этом, разрежение в полости 10 пневмоприсоски 5 падает за счет атмосферного воздуха.
Итак, заявляемое изобретение позволяет позиционировать по наклонным, вертикальным или потолочным поверхностям, что достигается использованием вакуумных захватных устройств на приводе микроробота.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 2002 |
|
RU2210493C1 |
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОРОБОТА | 2005 |
|
RU2281197C1 |
| АВТОНОМНОЕ ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОРОБОТА | 2004 |
|
RU2266810C1 |
| ПРИВОД МИКРОМАНИПУЛЯТОРА | 2000 |
|
RU2175601C2 |
| МОБИЛЬНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРОРОБОТ | 1999 |
|
RU2164362C2 |
| НАНОСТРУКТУРНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОМАНИПУЛЯТОРА | 2006 |
|
RU2331505C1 |
| НАНОСТРУКТУРНОЕ ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРООБЪЕКТАМИ, ИЗГОТОВЛЕННЫМИ ИЗ ЭЛЕКТРОПРОВОДНИКОВЫХ МАТЕРИАЛОВ | 2009 |
|
RU2423223C1 |
| КАПИЛЛЯРНЫЙ МИКРОЗАХВАТ С ОБРАТНОЙ СВЯЗЬЮ | 2004 |
|
RU2261795C1 |
| Вакуумный захват | 2022 |
|
RU2794665C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МАНИПУЛЯТОР | 1999 |
|
RU2172239C2 |
Использование: изобретение относится к области машиностроения и может быть использовано для прецизионного перемещения изделий по наклонным, вертикальным или потолочным поверхностям. Технический результат: позиционирование по наклонным, вертикальным или потолочным поверхностям за счет применения вакуумных захватных устройств, установленных на приводе микроробота. Сущность изобретения: мобильный вакуумный пьезоэлектрический микроробот содержит подвижную платформу, привод в виде основного пьезокристалла, на концах которого установлены первый и второй вакуумные захватные устройства. Вакуумное захватное устройство представляет собой пневмоприсоску и пневматический пьезонасос. Пьезонасос состоит из деформируемого элемента, который выполнен в виде силового пьезокристалла, и эластичного элемента конструкции, который выполнен в виде цилиндра из эластичного материала. Основная полость пневматического пьезонасоса разделена с внешней полостью пневматического пьезонасоса и полостью пневмоприсоски, соответственно, первым и вторым клапанами, которые представляют собой первый и второй распределительные пьезокристаллы. Пневмоприсоска плотно прилегает к поверхности позиционирования. 4 ил.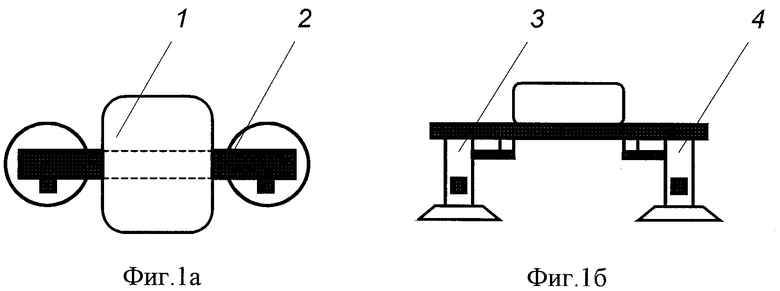
Мобильный вакуумный пьезоэлектрический микроробот, содержащий подвижную платформу с приводом, выполненным в виде основного пьезокристалла, отличающийся тем, что на концах основного пьезокристалла установлены вакуумные захватные устройства, представляющие собой пневмоприсоску и пневматический пьезонасос, состоящий из деформируемого элемента в виде силового пьезокристалла и эластичного элемента конструкции, который выполнен в виде цилиндра из эластичного материала, при этом в основной полости пневматического пьезонасоса установлены первый и второй клапаны, которые представляют собой первый и второй распределительные пьезокристаллы, расположенные между основной полостью пневматического пьезонасоса и соответственно внешней полостью пневматического пьезонасоса и полостью пневмоприсоски.
| МОБИЛЬНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРОРОБОТ | 1999 |
|
RU2164362C2 |
| Микроманипулятор | 1989 |
|
SU1823806A3 |
| US 5872417, 16.02.1999 | |||
| US 4727273, 23.02.1988. | |||

