Изобретение относится к передвижным мастерским ремонта и технического обслуживания лесных, сельскохозяйственных и дорожных машин и может быть использовано для выполнения работ по восстановлению и поддержанию работоспособности машин в местах их эксплуатации.
Известны передвижные ремонтные мастерские, представляющие собой транспортное средство (автомобиль или трактор) с кузовом-фургоном и гидравлическим краном манипулятором [1]. Наиболее близким аналогом является передвижная мастерская для ремонта и технического обслуживания машин, содержащая базовый автомобиль, на раме которого установлен фургон, кран-манипулятор и съемный кузов с ячейками, в которых размещены сменные модули с технологическим оборудованием [2].
К недостаткам аналогов и прототипа следует отнести то, что особенности конструкции крана-манипулятора существенно сужают технологические возможности передвижной ремонтной мастерской. Так, в частности, с помощью крана-манипулятора нельзя качественно выполнять сложные сборочные работы, требующие для своего выполнения высокой точности позиционирования для обеспечения точного начального совмещения сборочных единиц и высокой податливости, позволяющей рабочему в процессе сборки при минимальном сборочном усилии без повреждения сопрягаемых поверхностей производить необходимую корректировку ориентации и положения сборочных единиц. Недостаточная точность позиционирования (±20мм) и податливость крана-манипулятора связаны с тем, что он является манипулятором с дистанционным управлением, а не пневматическим сбалансированным манипулятором. У пневматических сбалансированных манипуляторов возможно создание систем управления, реагирующих на изменение давления в пневмоприводе, уравновешивающего вес груза, при приложении небольшого усилия непосредственно к грузу, т.е. управление движением объекта манипулирования производится путем непосредственно перемещения его руками, без воздействия на задающее устройство. В этом случае и точность позиционирования и податливость сборочной системы будет значительно выше, чем при использовании манипулятора с дистанционным управлением или сбалансированного манипулятора с гидравлическим или электромеханическим приводами. Кроме того, так как сборочная единица подвешивается к крюку крана манипулятора, то в ряде случаев невозможно обеспечить подвод сборочной единицы в зону сборки, закрытую сверху другими агрегатами или деталями.
Изобретение решает задачу расширения технологических возможностей передвижной ремонтной мастерской.
Техническим результатом изобретения является расширение технологических возможностей передвижной ремонтной мастерской за счет создания условий для выполнения сложных сборочных операций, для которых требуется начальное совмещение сборочных единиц с точностью до ±0,5 мм и возможность корректировки их положения и пространственной ориентации в процессе сборки.
Для достижения технического результата предложенная передвижная ремонтная мастерская, содержащая базовый автомобиль, на раме которого установлены фургон, кран-манипулятор и съемный кузов с ячейками, отличающаяся тем, что в одной из ячеек размещен грузоподъемный модуль, состоящий из миниатюрного пневматического сбалансированного манипулятора, устройства управления и устройства ориентации, при этом сбалансированный манипулятор состоит из трех модулей перемещения, снабженных дистанционно-управляемыми устройствами фиксации начального положения, причем модуль вертикального перемещения имеет пневматический привод, на выходе модуля горизонтального перемещения расположено захватное устройство, при этом сбалансированный манипулятор имеет фланцы, расположенные выше центра тяжести манипулятора, с помощью которых он соединяется с фланцами устройства ориентации, имеющего быстроразъемное устройство для соединения с выходным звеном крана-манипулятора, причем устройство ориентации выполнено в виде рамы, на которой установлено устройство вращения фланцев, представляющее собой два подшипниковых узла с фрикционными дистанционно-управляемыми тормозами, при этом модуль горизонтального перемещения и модуль поворота вокруг вертикальной оси смонтированы относительно модуля вертикального перемещения так, что равнодействующая сил тяжести сбалансированного манипулятора при фиксации всех модулей перемещения в начальном положении перпендикулярна оси модуля горизонтального перемещения и пересекает ось, проходящую через центр фланцев.
Закрепление с помощью быстроразъемного устройства на выходе крана-манипулятора грузоподъемного модуля позволяет существенно расширить технологические возможности передвижной ремонтной мастерской, путем создания условий для выполнения сложных сборочных операций. Для выполнения сложной сборочной операции необходимо обеспечение начального совмещения сборочных единиц с точностью до ±0,2 мм и возможности корректировки их положения и пространственной ориентации в процессе сборки при приложении минимального сборочного усилия. Повышение сборочного усилия приводит к повышению риска повреждения сопрягаемых поверхностей сборочных единиц. Кроме этого, в ряде случаев требуется обеспечить подвод сборочной единицы в зону сборки сбоку или снизу, т. к. сверху зона сборки может быть закрыта другими агрегатами или деталями.
Использование пневматического сбалансированного манипулятора позволяет повысить точность начального совмещения сборочных единиц до ±0,2 мм и возможность корректировки их положения и пространственной ориентации в процессе сборки за счет того, что оператор управляет движением сборочной единицы, прикладывая непосредственно к ней незначительное усилие управления, а не дистанционно с помощью задающего устройства, как при управлении краном-манипулятором.
Наличие у сбалансированного манипулятора модуля горизонтального и вертикального перемещения и модуля поворота вокруг вертикальной оси позволяет обеспечить подвод сборочной единицы, расположенной в захватном устройстве, в зону сборки снизу или сбоку.
Устройство управления позволяет сформировать в пневматическом приводе модуля вертикального перемещения давление, необходимое для уравновешивания веса груза и сбалансированного манипулятора, и обеспечить его перемещения при приложении оператором минимального усилия управления. Кроме этого, устройство управления позволяет обеспечить управление захватным устройством, фрикционными тормозами устройства ориентации и устройствами начального положения модулей сбалансированного манипулятора.
Устройство ориентации в сочетании с устройствами начального положения модулей сбалансированного манипулятора необходимы для одинаковой ориентации сбалансированного манипулятора при различном положении выхода крана-манипулятора, за счет использования его силы тяжести.
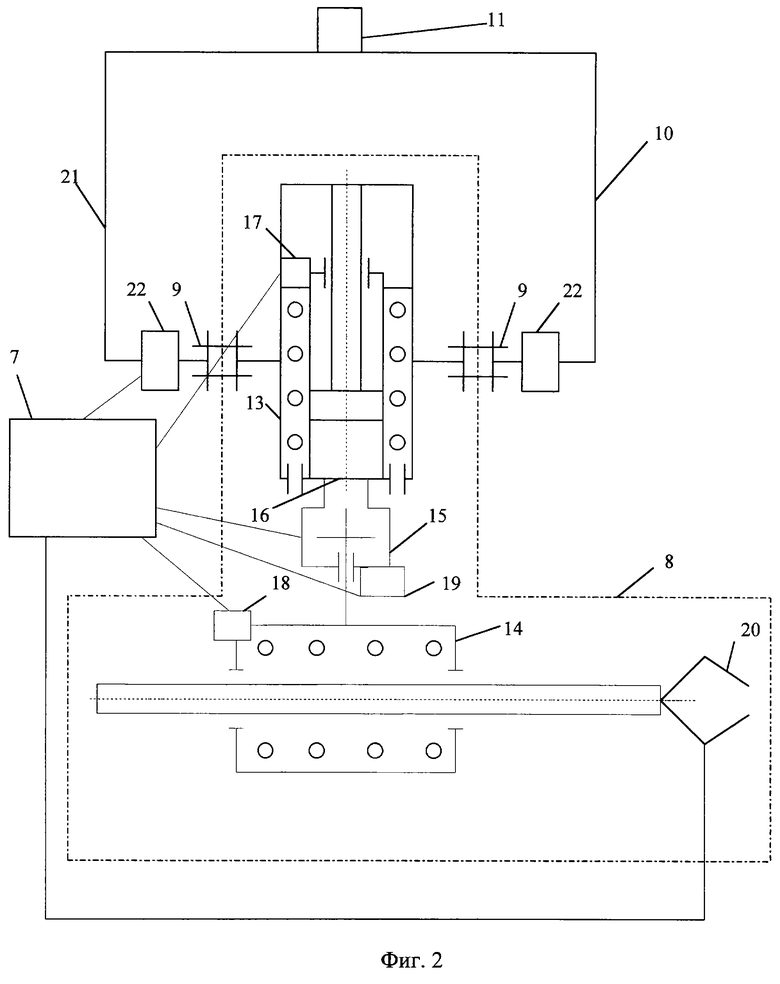
На фиг. 1 показана предлагаемая мастерская, общий вид; на фиг.2 показан грузоподъемный модуль, общий вид.
Передвижная ремонтная мастерская содержит базовый автомобиль 1, на раме которого установлены фургон 2 со стационарным технологическим оборудованием (типа слесарного верстака, токарного станка и т.п.), кран-манипулятор 3, съемный кузов 4, в котором расположены ячейки 5, в одной из которых размещен грузоподъемный модуль 6. Грузоподъемный модуль 6 состоит из устройства управления 7, миниатюрного пневматического сбалансированного манипулятора 8, который с помощью фланцев 9, расположенных выше центра тяжести манипулятора 8, соединен с фланцами устройства ориентации 10. Устройство ориентации 10 имеет быстроразъемное устройство 11 для соединения с выходной стрелой 12 крана-манипулятора 3. Сбалансированный манипулятор состоит из трех модулей 13, 14, 15, причем модуль вертикального перемещения 13 имеет пневматический привод 16, а модули горизонтального перемещения 14 и поворота вокруг вертикальной оси 15 привода не имеют. Все три модуля 13, 14 и 15 имеют дистанционно управляемые устройства фиксации начального положения, соответственно 17, 18 и 19. На выходе модуля горизонтального перемещения установлено дистанционно-управляемое захватное устройство 20. Устройство ориентации 10 выполнено в виде рамы 21, на которой установлено устройство вращения фланцев 22, выполненное в виде двух подшипниковых узлов с фрикционными дистанционно-управляемыми тормозами. Модуль горизонтального перемещения 14 с захватным устройством 20 и модуль поворота вокруг вертикальной оси закрепляются на модуле вертикального перемещения 13 таким образом, чтобы равнодействующая сил тяжести сбалансированного манипулятора при фиксации всех модулей подвижности с помощью устройств 17, 18, 19 в начальном положении была перпендикулярна модулю горизонтального перемещения и пересекала ось, проходящую через центры фланцев 9.
Работает передвижная ремонтная мастерская следующим образом:
При необходимости замены агрегата или детали на ремонтируемой машине оператор подводит кран-манипулятор 3 к ячейке 5, в которой размещен грузоподъемный модуль 6, и соединяет модуль 6 с выходной стрелой 12 с помощью быстроразъемного соединения 11. При размещении модуля 6 в ячейке 5 все три модуля перемещения 13, 14 и 15 зафиксированы в начальном положении с помощью устройств фиксации 17, 18 и 19 соответственно, а фланцы 9 заблокированы фрикционными дистанционно управляемыми тормозами устройства вращения 22. Далее оператор перемещает модуль 6 с помощью крана-манипулятора 3 в непосредственную близость к снимаемому агрегату и в таком положении фиксирует кран-манипулятор 3. После этого оператор с помощью устройства управления 7 подает сигнал на выключение фрикционных дистанционно-управляемых тормозов. В результате устройство вращения фланцев 22 разблокируется. Под действием силы тяжести сбалансированный манипулятор 8 разворачивается таким образом, что модуль горизонтального перемещения 14 принимает горизонтальное положение. Далее оператор с помощью устройства управления 7 подает сигнал на включение дистанционно-управляемых тормозов устройства 22 и тем самым блокирует возможность вращения фланцев 9, а также сигнал выключения на устройства фиксации 17, 18,19. В результате все три модуля подвижности 13,14 и 15 сбалансированного манипулятора 8 разблокируются и тем самым манипулятор 8 переводится в рабочее состояние. При этом модуль горизонтального перемещения 14 принимает горизонтальное положение, а устройство управления 7 формирует в поршневой полости пневматического привода 16 модуля вертикального перемещения 13 давление, позволяющее уравновесить собственный вес конструкции сбалансированного манипулятора 8. Далее оператор захватывает с помощью захватного устройства 20 снимаемый агрегат и производит отсоединение агрегата от машины. В это время устройство управления 7 автоматически формирует в поршневой полости пневматического привода 16 вертикальной степени подвижности 13 давление, уравновешивающее вес конструкции сбалансированного манипулятора и снимаемого агрегата. После этого оператор выводит агрегат в свободную зону за пределы ремонтируемой машины, с помощью устройства управления 7 подает сигналы на включение устройства фиксации начального положения 17, 18 и 19 и переводит манипулятор 8 в транспортное положение, при котором заблокированы модули 13,14 и 15, а также устройство вращения фланцев 22.
Далее оператор, управляя краном-манипулятором 3, перемещает грузоподъемный модуль 6, в захватном устройстве 20 которого зафиксирован снимаемый агрегат, к месту складирования неисправных агрегатов и, раскрыв с помощью устройства управления 7 захватное устройство 20, отпускает агрегат. После этого оператор, управляя краном-манипулятором 3, перемещает грузоподъемный модуль 6 к агрегату из ремфонда и захватывает его захватным устройством 20. Во время этой операции манипулятор 8 все время находится в транспортном положении, так как точности позиционирования крана-манипулятора 3 достаточно для ее выполнения.
Далее оператор перемещает грузоподъемный модуль 6 с помощью крана-манипулятора 3 в то место, в котором он находился во время демонтажа агрегата, и фиксирует кран-манипулятор 3. После этого оператор с помощью устройства управления 7 подает сигналы выключения на устройства фиксации 17, 18 и 19 и тем самым переводит сбалансированный манипулятор 8 в рабочее состояние. Оператор, захватив руками устанавливаемый агрегат, перемещает его на сборочную позицию, производит точное совмещение сопрягаемых поверхностей и осуществляет сборку. Кинематика пневматического сбалансированного манипулятора 8, наличие трех модулей перемещения 13, 14 и 15 позволяет обеспечить необходимую ориентацию устанавливаемого агрегата, а также подавать его в зону сборки снизу или сбоку. Также он обладает высокой податливостью, необходимой для корректировки положения агрегата в процессе сборки. Точность позиционирования сбалансированного манипулятора 8 за счет приложения оператором незначительного управляющего усилия непосредственно к объекту манипулирования значительно выше точности позиционирования дистанционного управляемого крана-манипулятора 3, используемого в прототипе. После выполнения сборки манипулятор переводится в транспортное положение и грузоподъемный модуль 6 перемещается в необходимое место для выполнения разборочно-сборочных работ или помещается для хранения в ячейку 5.
Источники информации:
1. М. И. Андрюшин, В. В. Балихин, Б.М. Большаков и др. Справочник по технологическим и транспортным машинам лесопромышленных предприятий и техническому сервису. - М.: МГУЛ, 2000. - 534 с.: ил.
2. Патент РФ RU 2057659 С1.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФИЛЬТР РУКАВНЫЙ ДЛЯ ТРЕХСТУПЕНЧАТОЙ ОЧИСТКИ ВОЗДУХА ОТ МЕХАНИЧЕСКИХ ПРИМЕСЕЙ | 2002 |
|
RU2202401C1 |
| СПОСОБ СГУЩЕНИЯ ВОЛОКНИСТОЙ МАССЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2027814C1 |
| ФИЛЬТР РУКАВНЫЙ ДЛЯ ОЧИСТКИ ВОЗДУХА ОТ МЕХАНИЧЕСКИХ ПРИМЕСЕЙ | 2000 |
|
RU2173207C1 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛКИ ПНЕЙ | 1998 |
|
RU2130708C1 |
| ЛЕСОХОЗЯЙСТВЕННАЯ МАШИНА | 1992 |
|
RU2040140C1 |
| РАБОЧИЙ ОРГАН ЗЕМЛЕРОЙНОЙ МАШИНЫ | 2002 |
|
RU2209888C1 |
| СПОСОБ ПОЛУЧЕНИЯ АНТИПИРЕНА | 2000 |
|
RU2172242C1 |
| СМЕСИТЕЛЬ ВОЛОКНИСТОЙ МАССЫ С ЖИДКИМИ РЕАГЕНТАМИ | 1989 |
|
RU2128260C1 |
| РАБОЧИЙ ОРГАН ЗЕМЛЕРОЙНОЙ МАШИНЫ | 1997 |
|
RU2130529C1 |
| ПЕРЕДВИЖНОЙ ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС ДЛЯ УСТРАНЕНИЯ АВАРИЙ НА НАЗЕМНОМ СБОРНО-РАЗБОРНОМ НЕФТЕПРОДУКТОПРОВОДЕ С СОЕДИНЕНИЕМ "РАСТРУБ" | 2019 |
|
RU2726986C1 |
Изобретение относится к передвижным мастерским. Передвижная ремонтная мастерская содержит базовый автомобиль 1, на раме которого установлены фургон 2, кран-манипулятор 3 и съемный кузов 4 с ячейками 5. В одной из ячеек размещен грузоподъемный модуль, состоящий из миниатюрного пневматического сбалансированного манипулятора, устройства управления и устройства ориентации. Сбалансированный манипулятор состоит из трех модулей перемещения, снабженных дистанционно управляемыми устройствами фиксации начального положения. На выходе модуля горизонтального перемещения расположено захватное устройство. Модуль горизонтального перемещения и модуль поворота вокруг вертикальной оси смонтированы относительно модуля вертикального перемещения так, что равнодействующая сил тяжести сбалансированного манипулятора при фиксации всех модулей перемещения в начальном положении перпендикулярна оси модуля горизонтального перемещения и пересекает ось, проходящую через центр фланцев. Изобретение расширяет технологические возможности. 2 ил.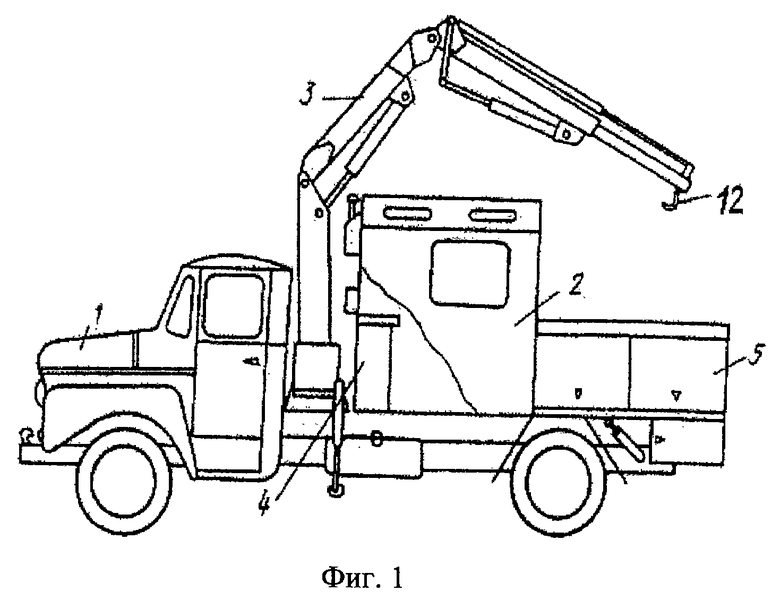
Передвижная ремонтная мастерская, содержащая базовый автомобиль, на раме которого установлены фургон, кран-манипулятор и съемный кузов с ячейками, отличающаяся тем, что в одной из ячеек размещен грузоподъемный модуль, состоящий из миниатюрного пневматического сбалансированного манипулятора, устройства управления и устройства ориентации, при этом сбалансированный манипулятор состоит из трех модулей перемещения, снабженных дистанционно управляемыми устройствами фиксации начального положения, причем модуль вертикального перемещения имеет пневматический привод, на выходе модуля горизонтального перемещения расположено захватное устройство, при этом сбалансированный манипулятор имеет фланцы, расположенные выше центра тяжести манипулятора, с помощью которых он соединяется с фланцами устройства ориентации, имеющего быстроразъемное устройство для соединения с выходным звеном крана-манипулятора, причем устройство ориентации выполнено в виде рамы, на которой установлено устройство вращения фланцев, представляющее собой два подшипниковых узла с фрикционными дистанционно управляемыми тормозами, при этом модуль горизонтального перемещения и модуль поворота вокруг вертикальной оси смонтированы относительно модуля вертикального перемещения так, что равнодействующая сил тяжести сбалансированного манипулятора при фиксации всех модулей перемещения в начальном положении перпендикулярна оси модуля горизонтального перемещения и пересекает ось, проходящую через центр фланцев.
| ПЕРЕДВИЖНАЯ МАСТЕРСКАЯ ДЛЯ РЕМОНТА И ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ МАШИН | 1992 |
|
RU2057659C1 |
| УСТАНОВКА ДЛЯ ОБЕЗВОЖИВАНИЯ СИНТЕТИЧЕСКОГО КАУЧУКА | 1992 |
|
RU2005604C1 |
| Электрический выключатель с выдержкой времени | 1924 |
|
SU1370A1 |

