Изобретение относится к области общего машиностроения, в частности к устройствам для позиционирования тяжелого оборудования.
Известно устройство для выверки оборудования в горизонтальной плоскости [1], представляющее из себя приспособление, выполненное в виде установленных между оборудованием и фундаментом блоков, состоящих из верхнего и нижнего дисков, между которыми размещены шары, заключенные в обойму с радиально расположенными регулировочными винтами, взаимодействующими своим торцом с верхним диском, причем между обоймами и дисками установлены пластинчатые пружины.
Наиболее близким к предлагаемому устройству является сейсмический изолятор (прототип) [2], состоящий из трех плит, лежащих друг на друге, и механизма сдвига плит. Каждая пара плит в этом устройстве верхняя-средняя и средняя-нижняя опираются друг на друга через две направляющие канавки с опорными роликами, причем направляющие канавки в системе верхняя-средняя плиты ориентированы перпендикулярно по отношению к направляющим канавкам в системе средняя-нижняя плиты.
К недостаткам данного устройства относятся способность устройства позиционировать оборудование только в горизонтальной плоскости и необходимость проведения подготовительных работ для позиционирования оборудования.
Задачей изобретения является создание устройства, позволяющего производить позиционирование оборудования не только в горизонтальной плоскости, но и по вертикали, создание устройства, заранее подготовленного к работе, исключающее трудоемкие подготовительные работы по подъему оборудования для позиционирования.
Поставленная задача достигается тем, что в устройстве предусмотрены все средства для позиционирования тяжелого оборудования по трем направлениям (оси X, Y, Z).
Устройство для позиционирования оборудования содержит пакет из трех плит (верхняя, средняя, нижняя). Каждая пара взаимодействует между собой через два ряда опорных роликов, уложенных в направляющие канавки, выполненные на смежных поверхностях плит, причем направление канавок в системе верхняя-средняя плиты перпендикулярно по отношению к направлению канавок в системе средняя-нижняя плиты. Такая комбинация плит дает возможность смещения верхней плиты относительно нижней в любом направлении по горизонтали, а применение роликов позволяет передавать через стыки плит большие нагрузки. В устройстве предусмотрен механизм сдвига плит, выполненный в виде винтовой пары винт-гайка, расположенный между каждой парой плит и взаимодействующий с верхней и нижней плитами. Винт упирается своими торцами в выступы средней плиты и ввинчивается в гайку, закрепленную в верхней и нижней плитах, обеспечивая перемещение одной плиты относительно другой вдоль направляющих.
Для обеспечения позиционирования по вертикали (ось Z) используется домкрат, концевая часть его грузового винта своей сферической головкой прижата через подпятник к гнезду в верхней плите накидным фланцем с обеспечением возможности наклона винта к поверхности плиты в небольших пределах для компенсации угловых перекосов при работе устройства. На корпусе домкрата выполнен фланец с выступом, который соединяется с ответным фланцем на боковой поверхности опорной рамы оборудования, а выступ на фланце домкрата входит в паз фланца рамы. Такое соединение надежно передает нагрузки на опору от массы оборудования. На корпусе домкрата установлена грузовая цапфа для подъема оборудования.
С целью ориентации плит между верхней плитой и корпусом домкрата установлен трехзвенный шарнирный механизм, в котором оси, соединяющие звенья между собой и корпусом домкрата, параллельны между собой, а ось, соединяющая шарнир с верхней плитой, совпадает с центром сферического конца винта домкрата и ориентирована перпендикулярно по отношению к остальным осям шарнира. Этот механизм позволяет менять расстояние между верхней плитой и корпусом домкрата, удерживая плиты от разворота, при этом звенья шарнира либо распрямляются, либо складываются. Не препятствует он и наклону винта к поверхности плиты. В случае наклона винта по направлению оси Y звенья шарнира либо распрямляются, либо складываются, а в случае наклона винта по направлению оси Х происходит поворот всех звеньев шарнира вокруг оси, соединяющих шарнир с верхней плитой.
Плиты (нижняя, средняя, верхняя) входят между собой в подвижное зацепление по типу "ласточкин хвост". Такое соединение не препятствует запланированным взаимным перемещениям плит вдоль направляющих канавок и, одновременно, соединяет плиты между собой, делая узел транспортабельным. Выход плит из зацепления исключен, так как они удерживаются механизмом сдвига и ограничителями хода, установленными на кромках смежных плит.
Выпадение роликов из направляющих канавок исключено, так как ролики удерживаются сепараторами, на боковых кромках которых выполнены продолговатые пазы, для ограничителей, установленных в верхней и нижней плитах.
Сущность изобретения поясняется чертежами, представленными на фиг.1-10.
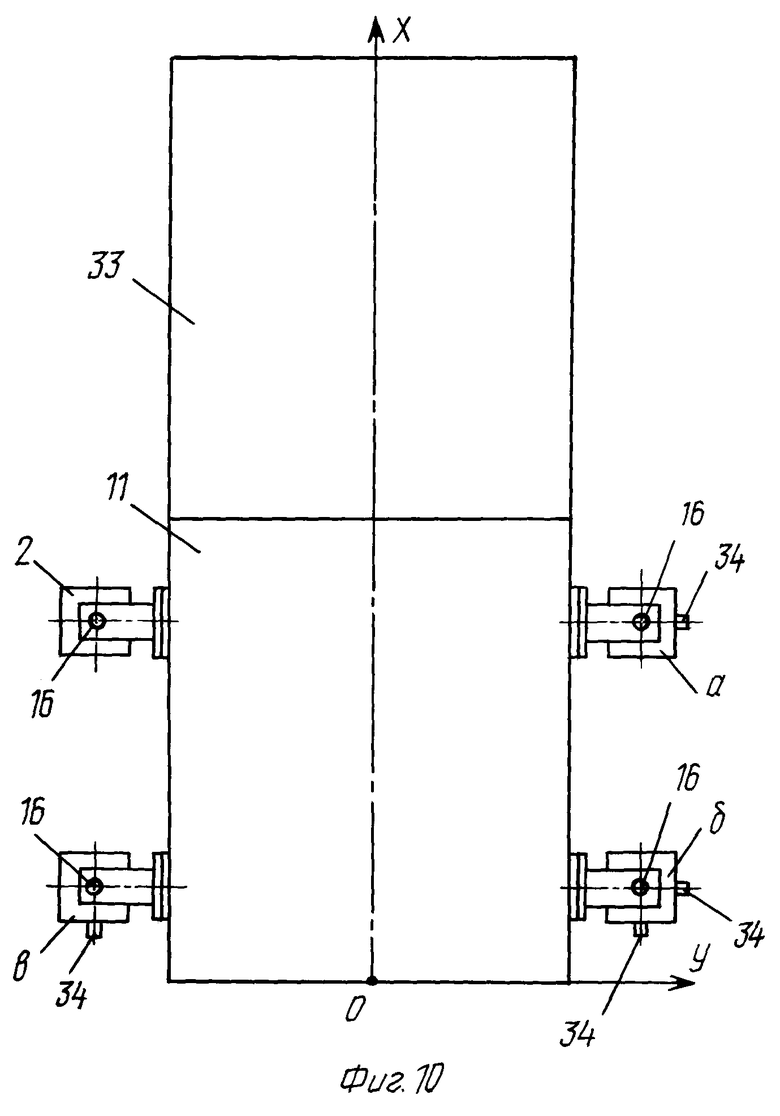
На фиг.1 изображено устройство для позиционирования оборудования - общий вид.
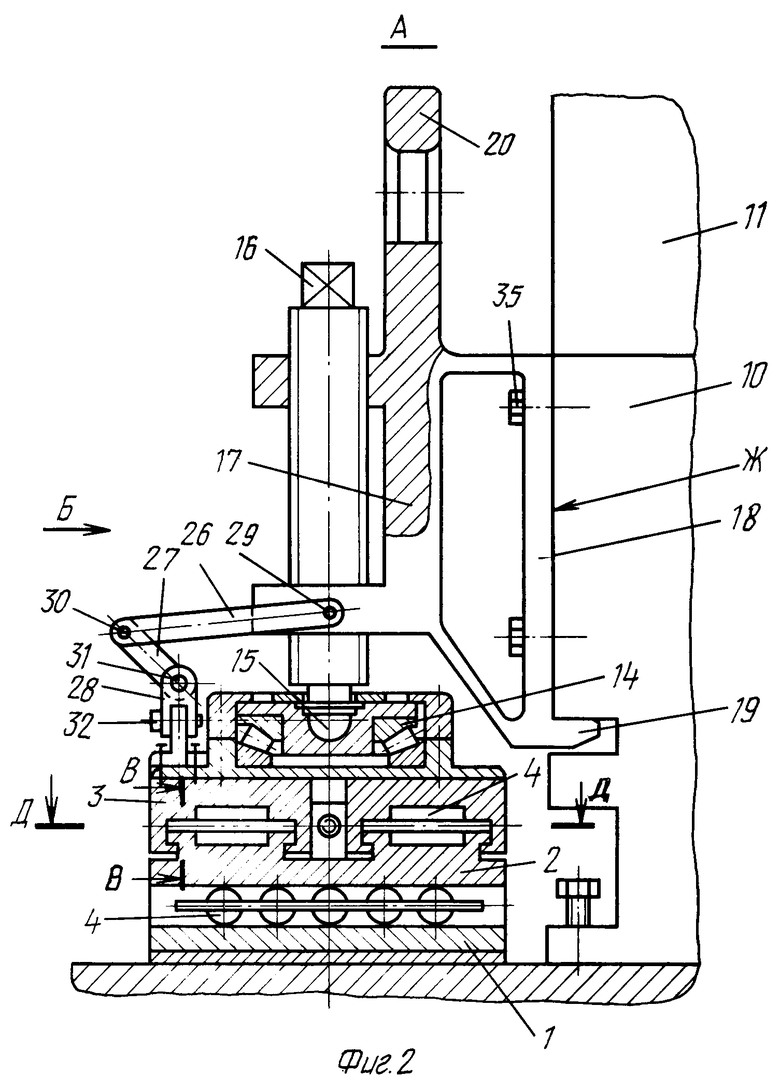
На фиг.2 - устройство для позиционирования оборудования - вид А.
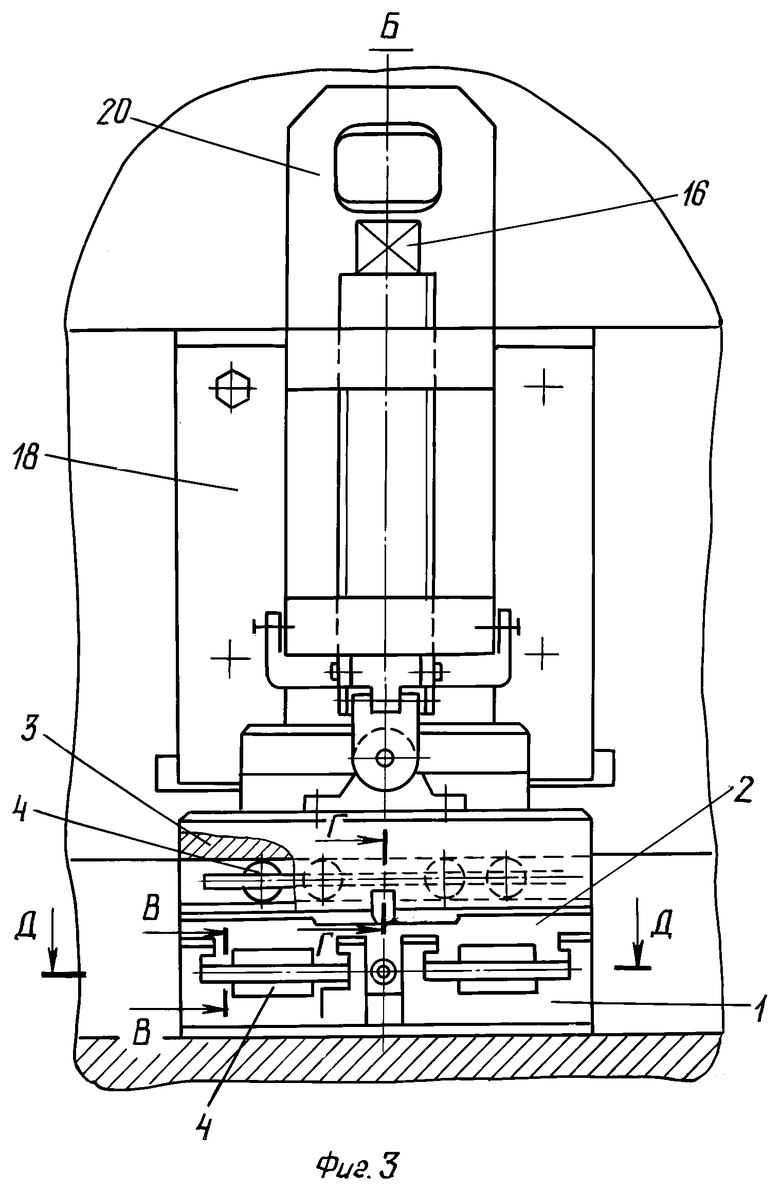
На фиг.3 - устройство для позиционирования оборудования - вид Б.
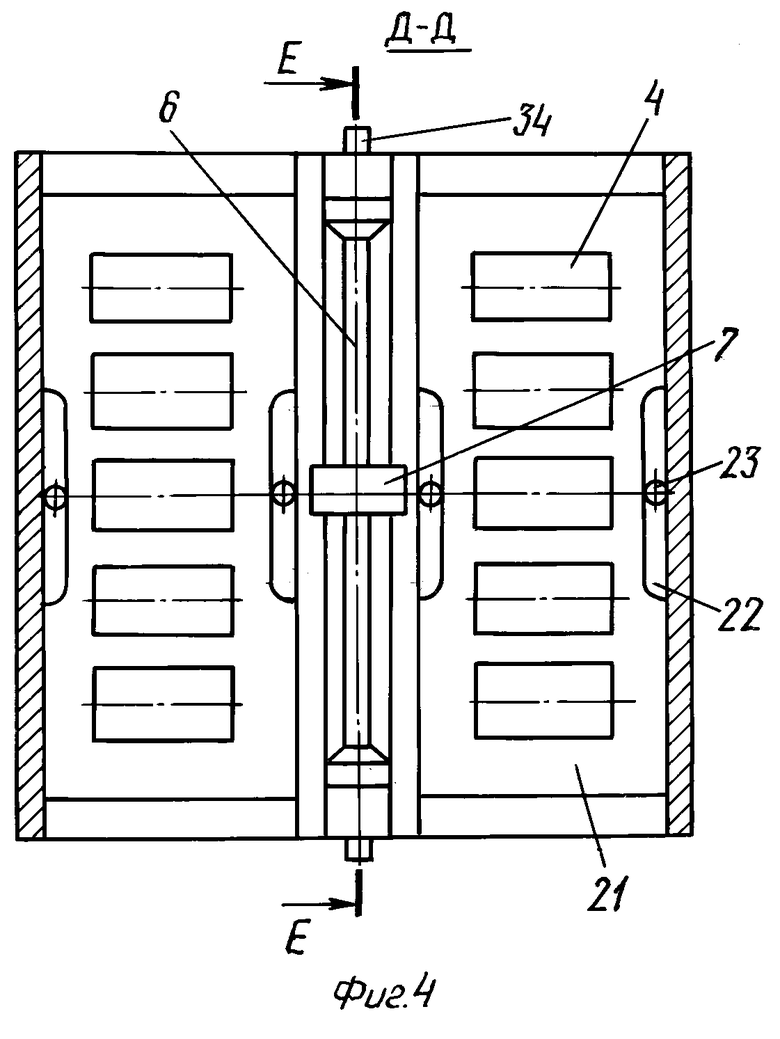
На фиг.4 - сечение Д-Д.
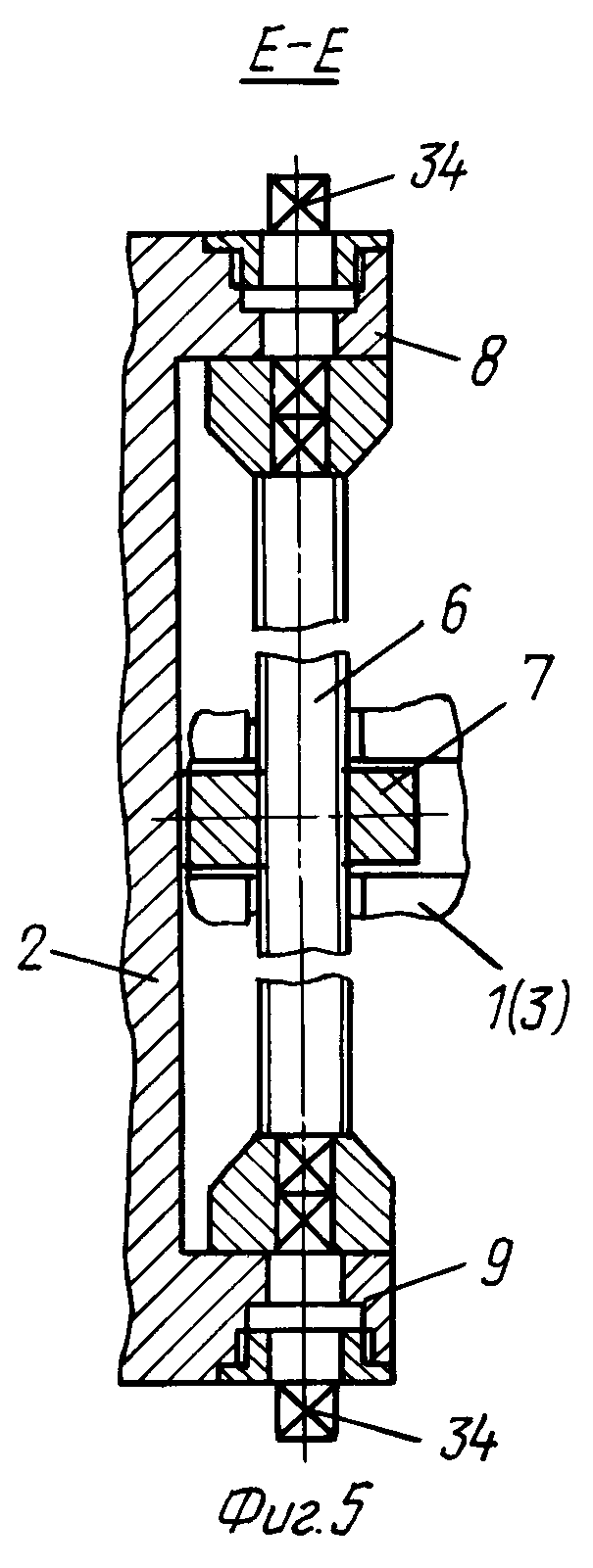
На фиг.5 - сечение Е-Е.
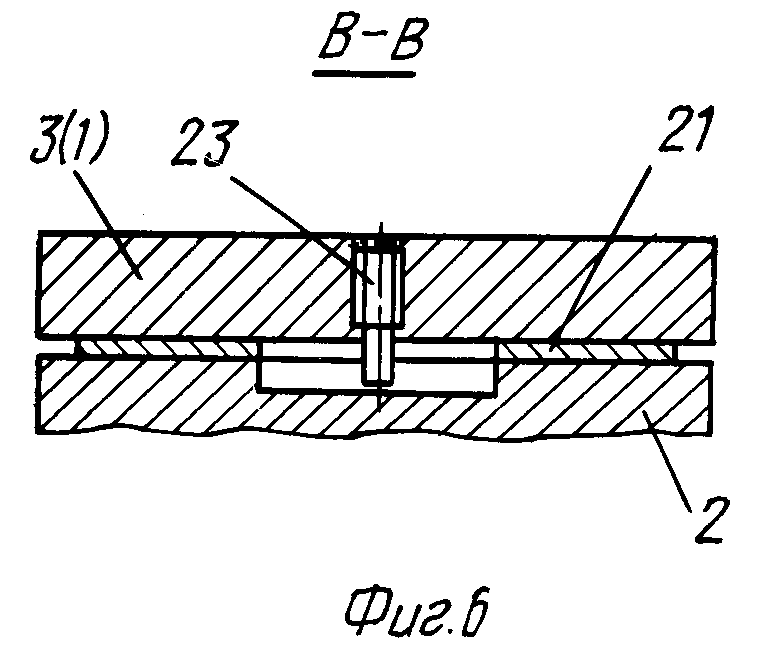
На фиг.6 - сечение В-В.
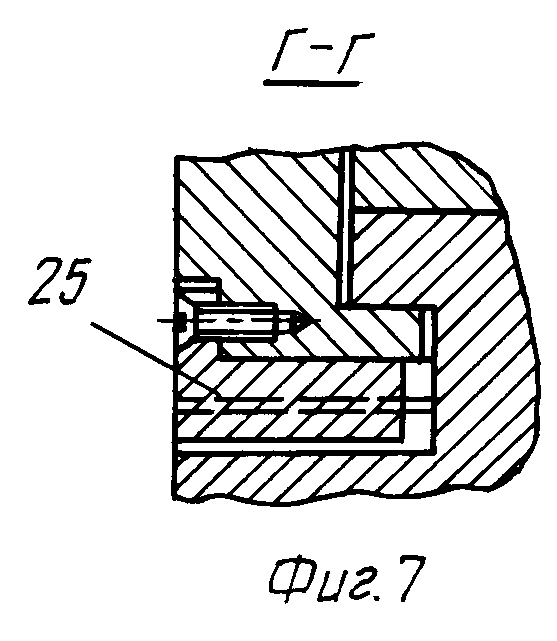
На фиг.7 - сечение Г-Г.
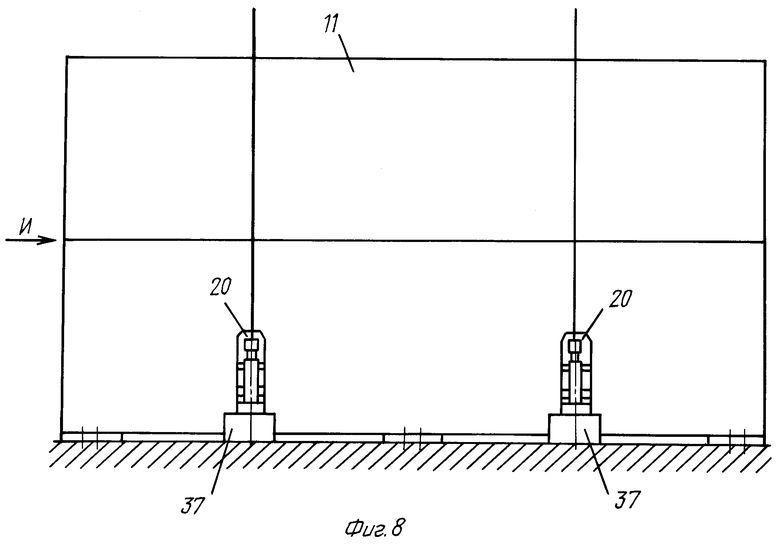
На фиг. 8 - стыковка оборудования с устройством для позиционирования - вид спереди.
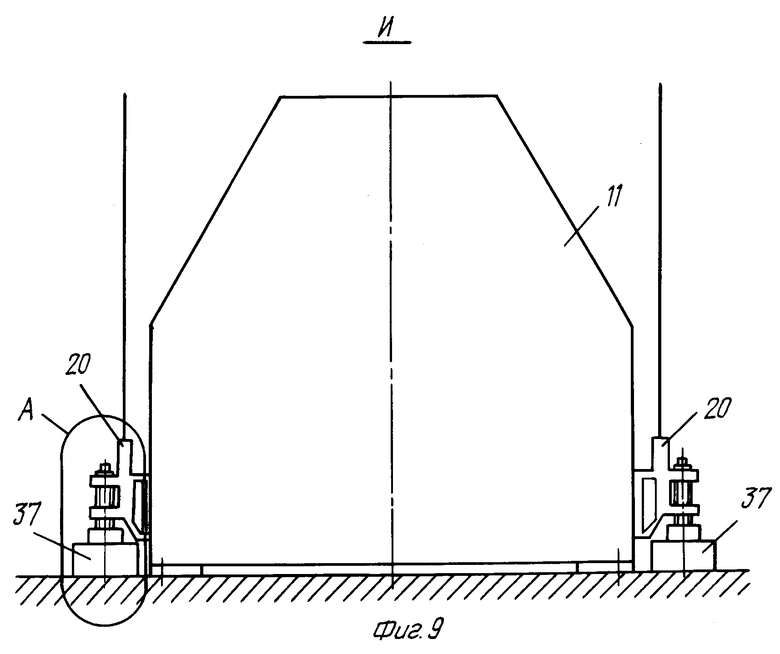
На фиг. 9 - стыковка оборудования с устройством для позиционирования - вид сбоку.
На фиг.10 - монтаж устройства для позиционирования с оборудованием.
На фиг.1, 2 показано устройство для позиционирования оборудования, состоящее из пакета плит- нижняя 1, средняя 2 и верхняя 3, которые опираются друг на друга через два ряда опорных роликов 4, уложенных в направляющих канавках 5 (фиг. 1), выполненных на смежных поверхностях плит. Направление канавок в системе верхняя-средняя плиты перпендикулярно по отношению направления канавок в системе средняя-нижняя плиты. Эта комбинация плит дает возможность смещения верхней плиты относительно нижней в любом направлении горизонтальной плоскости, а применение роликов позволяет передавать через стыки плит большие нагрузки.
Между каждой парой плит (фиг.4, 5) установлен механизм сдвига, выполненный в виде винтовой пары винт 6 - гайка 7, в которой винт 6 опирается попеременно своими торцами в выступы 8, 9 плиты 2 и ввинчивается в гайку 7, закрепленную в плитах 1 или 3. Переходники 34 являются по существу продолжением винта 6, которые выводят его рабочий конец за пределы плиты для удобства при эксплуатации.
Для обеспечения позиционирования по вертикали (ось Z) (фиг.2) используется домкрат, который установлен на верхней плите. Таким образом, оборудование, соединенное с домкратом и опирающееся на пакет из трех плит, имеет возможность перемещения по трем направлениям (оси X, Y, Z).
Снаружи (фиг. 2) в центральную часть верхней плиты (3 вмонтирован через подпятник 14 опорный сферический конец 15 винта 16 грузового домкрата, на корпусе 17 которого выполнен фланец 18 с выступом 19 для присоединения к боковой поверхности Ж рамы 10 оборудования 11 и грузовая цапфа 20 для подъема.
На фиг.2 устройство для позиционирования присоединяют к опорной раме 10 оборудования 11 по ее боковым поверхностям Ж в местах расположения узлов строповки.
На смежных поверхностях каждой пары плит (фиг.1) по обеим сторонам канавок 5 для роликов выполнены пазы 12 и выступы 13, входящие между собой в зацепление по типу "ласточкин хвост" и ориентированные параллельно канавкам 5. Такое соединение не препятствует запланированным взаимным перемещениям плит вдоль направляющих канавок и, одновременно, соединяет плиты между собой, делая узел транспортабельным.
На фиг.4 - каждый ряд опорных роликов 4 в устройстве заключен в сепаратор 21, на боковых кромках которого выполнены продолговатые пазы 22, для ограничителей 23, установленных в верхней 3 и нижней 1 плитах (фиг.6).
На фиг.1 в стыках каждой пары плит 1, 2 и 2, 3 на боковых кромках плиты 2 выполнены пазы 24 для ограничителей хода 25, установленных на кромках смежных плит 1 и 3 - фиг.7
На фиг. 2 с целью ориентации плит между верхней плитой 3 и корпусом домкрата 17 установлен механизм, исключающий их взаимный разворот, который выполнен в виде трехзвенного шарнира в котором оси 29, 30, 31, соединяющие звенья 26, 27, 28 между собой и с корпусом домкрата 17, параллельны между собой, а ось 32, соединяющая шарнир с верхней плитой 3, совпадает с центром сферического конца 15 винта 16 грузового домкрата и ориентирована перпендикулярно по отношению к остальным осям шарнира.
Работа устройства по позиционированию оборудования производится следующим образом.
Оборудование в исходном положении, установленное на своей опорной раме, находится на заводской площадке.
На фиг.8, 9 - выбор места для присоединения к опорной раме оборудования в местах его строповки обусловлен тем, что нагружение рамы в этом случае является наиболее рациональным и уровень напряжений в конструкции меньший, чем в других случаях, поэтому опорная рама подвержена меньшим деформациям при проведении позиционирования. Такое размещение устройства 37 позволяет грузовую цапфу как элемент конструкции оборудования перенести на устройство и таким образом уменьшить габариты оборудования, что является преимуществом для контейнерного оборудования, габарит которого ограничен условиями перевозок.
Устройства для позиционирования комплектуют в соответствии со схемой на фиг. 10. На схеме показано оборудование 11, объект 33, относительно которого производится позиционирование, и устройства, стыкуемые с опорной рамой оборудования 11.
Устройства имеют различные варианты применения "а", "б", "в", "г" в части наличия в них механизма сдвига плит, а также их размещения в системах верхняя-средняя и нижняя-средняя плиты.
Вариант "а" снабжен механизмом сдвига в паре плит - нижняя-средняя, обеспечивающим перемещение этих плит вдоль оси Y.
Вариант "б" снабжен механизмами сдвига в паре плит - верхняя-средняя и средняя-нижняя, обеспечивающими перемещение верхней плиты относительно нижней по направлениям вдоль осей Х и Y.
Вариант "в" снабжен механизмом сдвига в паре плит - верхняя-средняя, обеспечивающим перемещение этих плит вдоль оси X.
Вариант "г" не имеет механизмов сдвига в обеих парах плит, т.е. является по существу ведомым.
Варианты применения устройства "а", "б", "в", "г" располагают рядом с оборудованием 11, вблизи от стыковочных фланцев.
Вращением винта 16 (фиг.2) в ту или другую сторону совмещают стыковочный фланец 18 на корпусе домкрата с ответным фланцем на боковой поверхности Ж рамы оборудования так, чтобы выступ 19 на фланце корпуса домкрата 17 вошел в ответный паз на раме 10 оборудования.
Болтами 35 стягивают фланцы между собой.
Грузоподъемным механизмом производят строповку оборудования 11 за цапфы 20 и переносят оборудование в непосредственную близость к объекту 33 (фиг. 10).
Переходники 34 (фиг.5) приводят в действие механизмы сдвига устройства в вариантах применения "а", "б", "в", перемещая оборудование 11 в положение, соосное объекту 33 (фиг.10).
Винтами 16 домкратов опор производят регулировку оборудования 11 по высоте, совмещая его с объектом 33.
После завершения позиционирования отжимные болты 36 (фиг.1) приводят в контакт с фундаментом, разгружая устройства для позиционирования.
Фланцы 18 отстыковывают от рамы 10 оборудования, после чего устройства удаляют с места работ и складируют.
Источники информации
1. Авт. свид-во 413336, F 16 M 9/00.
2. Патент США 5716037, F 16 M 13/00.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ ОБОРУДОВАНИЯ | 2005 |
|
RU2283271C1 |
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ ОБОРУДОВАНИЯ | 2006 |
|
RU2317939C1 |
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ ОБОРУДОВАНИЯ | 2012 |
|
RU2500609C1 |
| ГРУЗОВАЯ ПОДВЕСКА ОБОРУДОВАНИЯ | 2012 |
|
RU2502664C1 |
| КОРПУС СЖАТИЯ НА ОПОРНОЙ РАМЕ | 2006 |
|
RU2315207C1 |
| Способ подготовки к транспортировке, транспортировки и последующей установки блочного компрессорного агрегата на производственной площадке потребителя | 2020 |
|
RU2741179C1 |
| Устройство для компенсации неплоскостности опорных поверхностей агрегатов | 2019 |
|
RU2706508C1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ НЕПЛОСКОСТНОСТИ ОПОР РАБОЧЕГО ОБОРУДОВАНИЯ | 2013 |
|
RU2537207C1 |
| МУЛЬТИПЛИКАТОР | 2003 |
|
RU2250193C1 |
| БЛОК-КОНТЕЙНЕР КОМПРЕССОРНОГО АГРЕГАТА И СПОСОБ ЕГО УСТАНОВКИ НА ФУНДАМЕНТ | 2011 |
|
RU2464449C1 |
Изобретение относится к области общего машиностроения и может быть использовано при позиционировании оборудования. Устройство содержит пакет из трех плит, на смежных поверхностях которых выполнены направляющие канавки для опорных роликов. Механизм взаимного сдвига плит выполнен в виде винтовой пары, расположенной между плитами в их каждой паре. Каждый винт соответствующей винтовой пары упирается своими торцами в выступы средней плиты и ввинчивается в гайку, закрепленную в соответствующей верхней или нижней плитах. В гнезде верхней плиты через подпятник установлен опорный сферический конец винта грузового домкрата, на корпусе которого установлена грузовая цапфа для подъема и выполнен фланец с выступом для присоединения к боковой поверхности рамы оборудования. Между верхней плитой и корпусом домкрата установлен трехзвенный шарнирный механизм, в котором оси, соединяющие звенья между собой и корпусом домкрата, параллельны между собой, а ось, соединяющая шарнир с верхней плитой, совпадает с центром сферического конца винта грузового домкрата и ориентирована перпендикулярно по отношению к остальным осям шарнира. На смежных поверхностях плит каждой пары по обеим сторонам канавок для роликов параллельно канавкам выполнены пазы и выступы, входящие между собой в зацепление по типу "ласточкин хвост". При этом каждый ряд опорных роликов заключен в сепаратор, на боковых кромках которого выполнены продолговатые пазы для ограничителей, установленных в верхней и нижней плитах. Изобретение позволяет повысить удобство эксплуатации. 10 ил.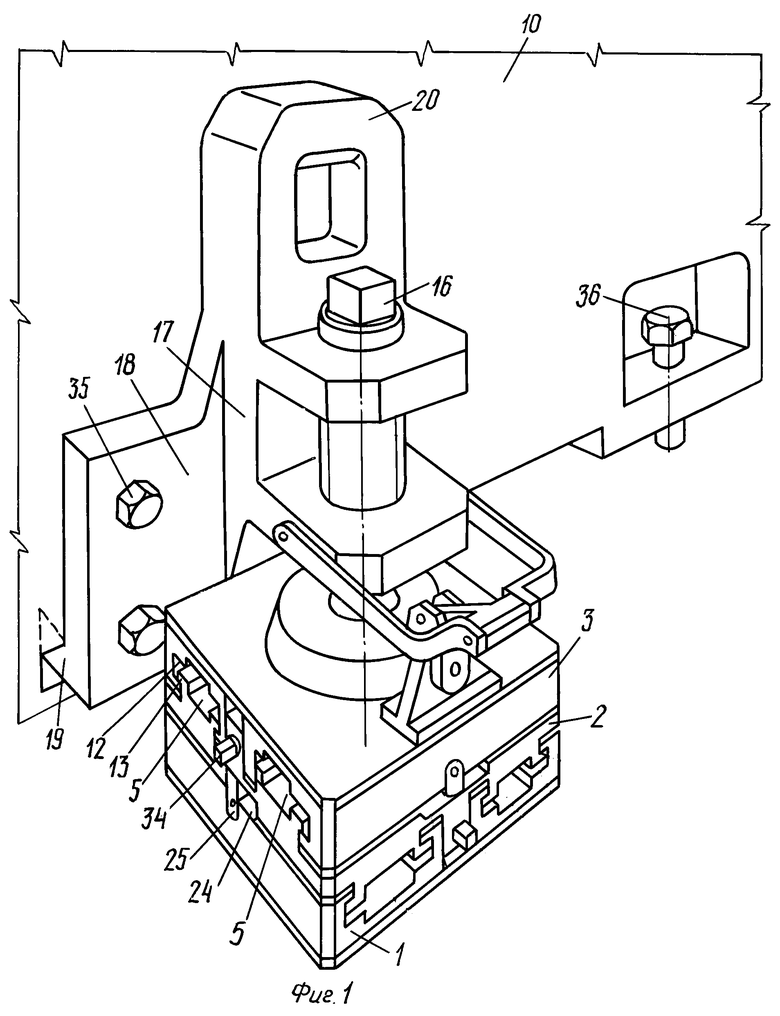
Устройство для позиционирования оборудования, содержащее пакет из трех плит, на смежных поверхностях которых выполнены направляющие канавки для опорных роликов, при этом направление канавок в системе верхняя-средняя плиты перпендикулярно по отношению к направлению канавок в системе средняя-нижняя плиты, механизм взаимного сдвига плит, отличающееся тем, что механизм взаимного сдвига плит выполнен в виде винтовой пары, расположенной между плитами в их каждой паре, каждый винт соответствующей винтовой пары упирается своими торцами в выступы средней плиты и ввинчивается в гайку, закрепленную в соответствующей верхней или нижней плитах, в гнезде верхней плиты через подпятник установлен опорный сферический конец винта грузового домкрата, на корпусе домкрата установлена грузовая цапфа для подъема и выполнен фланец с выступом для присоединения к боковой поверхности рамы оборудования, между верхней плитой и корпусом домкрата установлен трехзвенный шарнирный механизм, в котором оси, соединяющие звенья между собой и корпусом домкрата, параллельны между собой, а ось, соединяющая шарнир с верхней плитой, совпадает с центром сферического конца винта грузового домкрата и ориентирована перпендикулярно по отношению к остальным осям шарнира, на смежных поверхностях плит каждой пары по обеим сторонам канавок для роликов параллельно канавкам выполнены пазы и выступы, входящие между собой в зацепление по типу "ласточкин хвост", каждый ряд опорных роликов заключен в сепаратор, на боковых кромках которого выполнены продолговатые пазы для ограничителей, установленных в верхней и нижней плитах, в стыках плит каждой пары на боковых кромках средней плиты выполнены пазы для ограничителей хода, установленных на кромках смежных плит.
| US 5716037 А, 10.02.1998 | |||
| 1971 |
|
SU413336A1 | |
| Устройство для установкиОбОРудОВАНия HA фуНдАМЕНТ | 1979 |
|
SU806596A1 |
| SU 755750 А, 15.08.1980. | |||

