Изобретение относится к измерительной технике и может использоваться в системах ориентации.
Известны трехкомпонентные измерители угловой скорости, содержащие три однокомпонентных гироскопических датчика угловой скорости и блок электроники, вырабатывающий корректирующие сигналы, связанные с наличием методической погрешности от вращательного движения основания относительно оси, перпендикулярной к оси чувствительности и к оси подвеса гидроузла, и вычисляющий величину каждой составляющей вектора угловой скорости (Патент России 2140088, МПК6 G 01 P 9/02, опуб. БИ 29 20.10.99).
Однако такие устройства не учитывают влияние погрешностей, обусловленных эффектом некоммутативности конечных поворотов.
Задачей настоящего изобретения является уменьшение погрешностей трехкомпонентного измерителя угловой скорости, вызванных эффектом некоммутативности конечных поворотов. Это позволит измерять угловые скорости, не содержащие составляющих, обусловленных эффектом некоммутативности конечных поворотов.
Указанная задача достигается тем, что в трехкомпонентный измеритель угловой скорости, включающий первый, второй и третий гироскопические датчики угловой скорости с взаимно перпендикулярными измерительными осями, первый, второй и третий двухвходовые сумматоры, при этом первые входы первого, второго и третьего сумматоров соединены с выходами первого, второго и третьего датчиков угловой скорости соответственно, дополнительно введены первое и второе запаздывающие устройства, первый и второй измерители периода сигнала, первый, второй и третий трехвходовые умножители, при этом выход первого датчика угловой скорости соединен со входом первого запаздывающего устройства, выход которого соединен со вторым входом третьего умножителя, вход третьего датчика угловой скорости соединен со входом второго запаздывающего устройства, выход которого соединен со вторыми входами первого и второго умножителей, выход первого датчика угловой скорости соединен также со входом первого измерителя периода сигнала, выход которого соединен с третьим входом третьего умножителя, выход третьего датчика угловой скорости соединен со входом второго измерителя периода сигнала, выход которого соединен с третьими входами первого и второго умножителей, первый вход первого умножителя соединен с выходом первого датчика угловой скорости, а вход второго датчика угловой скорости соединен с первыми входами второго и третьего умножителей, при этом выход второго умножителя соединен со вторым входом первого сумматора, выход первого умножителя соединен со вторым выходом второго сумматора, а выход третьего умножителя соединен со вторым входом третьего сумматора.
На чертеже приведен пример конструктивной схемы трехкомпонентного измерителя угловой скорости.
Он состоит из трех каналов. По каждому из каналов установлены: 1, 2 и 3 - гироскопические датчики угловой скорости; 8, 9, 10 - трехвходовые умножители; 11, 12, 13 - двухвходовые сумматоры. По двум каналам установлены запаздывающие элементы 4, 5 и измерители периода сигнала 6, 7.
Выходы гироскопических датчиков угловой скорости 1 и 3 соединены с входами 14 и 15 запаздывающих элементов 4 и 5 соответственно и входами 16, 17 измерителей периода сигнала 6, 7. Вход 18 умножителя 8 соединен с выходом гироскопического датчика угловой скорости 1. Входы 19 и 20 умножителей 9 и 10 соединены с выходом гироскопического датчика угловой скорости 2. Выход запаздывающего элемента 5 соединен со вторыми входами 21, 22 умножителей 8, 9. Выход запаздывающего элемента 4 соединен с входом 23 умножителя 10. Входы 24 и 25 умножителей 8, 9 соединены с выходом измерителя периода сигнала 7. Вход 26 умножителя 10 соединен с выходом измерителя периода сигнала 6. Входы 27, 28, 29 сумматоров 11, 12 и 13 соединены с выходом соответствующих датчиков угловой скорости 1, 2 и 3 соответственно. Выходы умножителей 8, 9 и 10 соединены с входами 30, 31, 32 сумматоров 11, 12 и 13 соответственно.
Трехкомпонентный измеритель угловой скорости работает следующим образом. Сигналы с гироскопических датчиков угловой скорости 1 и 3, пропорциональные проекции абсолютной угловой скорости основания на ось OZ и ОХ, поступают на входы 14 и 15 запаздывающих элементов 4 и 5, а также на входы 16, 17 измерителей периода сигнала 6, 7. На вход 18 умножителя 8 поступает сигнал с датчика угловой скорости 1. На входы 19 и 20 умножителей 9 и 10 поступает сигнал с датчика угловой скорости 2. С выхода запаздывающего элемента 4 сигнал поступает на входы 23 умножителей 10. Сигнал с выхода запаздывающего элемента 5 поступает на входы 21 и 22 умножителей 8, 9. На входы 24 и 25 умножителей 8 и 9 поступает сигнал с выхода измерителя периода сигнала 7. На вход 26 умножителя 10 поступает сигнал с выхода измерителя периода сигнала 6. Сигналы с выходов умножителей 8, 9, 10 поступают на входы 30, 31 и 32 сумматоров 12, 11 и 13 соответственно. На входы 27, 28, 29 сумматоров 11, 12, 13 поступают выходные сигналы с гироскопических датчиков угловой скорости 1, 2, 3. На выходах сумматоров 11, 12, 13 получим соответственно три сигнала U(ωx),U(ωy) и U(ωz), пропорциональные проекциям вектора абсолютной угловой скорости основания на оси OX, OY, OZ.
U(ωx) = U′(ωx)-kU′(ωy)U′[(ωz)]U(Tz);
U(ωy) = U′(ωy)-kU′(ωz)U′[(ωx)]U(Tx);
U(ωz) = U′(ωz)-kU′(ωy)U′[(ωx)]U(Tx),
где U(ωx), U(ωy) и U(ωz) - выходные сигналы сумматоров 11,12,13 соответственно;
k - безразмерный коэффициент;
U′(ωx),U′(ωy),U′(ωz) - выходные сигналы гироскопических датчиков угловой скорости 1, 2 и 3 соответственно;
U′[(ωx)],U′[(ωz)] - выходные сигналы запаздывающих элементов 4 и 5 соответственно;
U(Tx), U(Tz) - выходные сигналы измерителей периода сигнала 7 и 6 соответственно.
Здесь каждое уравнение определяет одну компоненту абсолютной угловой скорости основания.
Проведенное моделирование показало, что при использовании данной конструктивной схемы трехмерного измерителя угловой скорости погрешности, обусловленные эффектом некоммутативности конечных поворотов уменьшается на порядок.
Таким образом, использование изобретения позволяет измерять угловые скорости, не содержащие составляющих, обусловленных эффектом некоммутативности конечных поворотов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХКОМПОНЕНТНЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2001 |
|
RU2196995C1 |
| ТРЕХКОМПОНЕНТНЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 1998 |
|
RU2140088C1 |
| ТРЕХКОМПОНЕНТНЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2273858C1 |
| Трехкомпонентный измеритель угловой скорости | 2024 |
|
RU2828994C1 |
| ТРЕХКОМПОНЕНТНЫЙ СТРУЙНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2017 |
|
RU2654308C1 |
| УСТРОЙСТВО ДЛЯ КОМПЛЕКСНОГО КОНТРОЛЯ ДАТЧИКОВ ПОДВИЖНОГО ОБЪЕКТА | 2011 |
|
RU2461040C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА | 2010 |
|
RU2440595C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ДВУХСТЕПЕННЫМ РОТОРНЫМ ВИБРАЦИОННЫМ ГИРОСКОПОМ | 2002 |
|
RU2210736C1 |
Изобретение относится к измерительной технике и предназначено для уменьшения погрешностей трехкомпонентного измерителя угловой скорости. В трехкомпонентный измеритель угловой скорости, включающий первый, второй и третий гироскопические датчики угловой скорости, с взаимно перпендикулярными измерительными осями, первый, второй и третий двухвходовые сумматоры, при этом первые входы первого, второго и третьего сумматоров соединены с выходами первого, второго, третьего датчиков угловой скорости соответственно, введены первое и второе запаздывающие устройства, первый и второй измерители периода сигнала, первый, второй, третий трехвходовые умножители, при этом выход первого датчика угловой скорости соединен со входом первого запаздывающего устройства, выход которого соединен со вторым входом третьего умножителя, выход третьего датчика угловой скорости соединен со входом второго запаздывающего устройства, выход которого соединен со вторыми входами первого и второго умножителей, выход первого датчика угловой скорости соединен также со входом первого измерителя периода сигнала, выход которого соединен с третьим входом третьего умножителя, выход третьего датчика угловой скорости соединен со входом второго измерителя периода сигнала, выход которого соединен с третьими входами первого и второго умножителей, первый вход первого умножителя соединен с выходом первого датчика угловой скорости, а вход второго датчика угловой скорости соединен с первыми входами второго и третьего умножителей, при этом выход второго умножителя соединен со вторым входом первого сумматора, выход первого умножителя соединен со вторым выходом второго сумматора, а выход третьего умножителя соединен со вторым входом третьего сумматора. Таким образом, использование изобретения позволяет измерять угловые скорости, не содержащие составляющих, обусловленных эффектом некоммутативности конечных поворотов. 1 ил.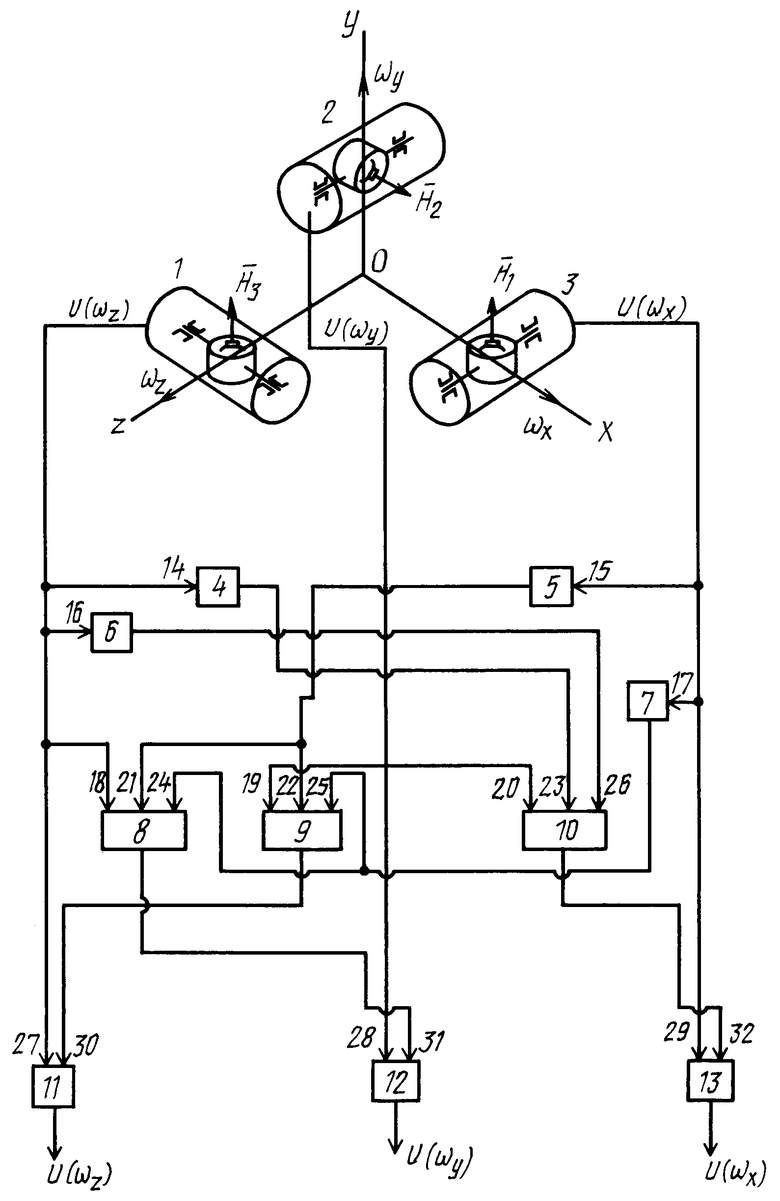
Трехкомпонентный измеритель угловой скорости, содержащий первый, второй и третий гироскопические датчики угловой скорости с взаимно перпендикулярными измерительными осями, первый, второй и третий двухвходовые сумматоры, при этом первые входы первого, второго и третьего сумматоров соединены с выходами первого, второго, третьего датчиков угловой скорости соответственно, отличающийся тем, что в него дополнительно введены первое и второе запаздывающие устройства, первый и второй измерители периода сигнала, первый, второй, третий трехвходовые умножители, при этом выход первого датчика угловой скорости соединен со входом первого запаздывающего устройства, выход которого соединен со вторым входом третьего умножителя, выход третьего датчика угловой скорости соединен со входом второго запаздывающего устройства, выход которого соединен со вторыми входами первого и второго умножителей, выход первого датчика угловой скорости соединен также со входом первого измерителя периода сигнала, выход которого соединен с третьим входом третьего умножителя, выход третьего датчика угловой скорости соединен со входом второго измерителя периода сигнала, выход которого соединен с третьими входами первого и второго умножителей, первый вход первого умножителя соединен с выходом первого датчика угловой скорости, а выход второго датчика угловой скорости соединен с первыми входами второго и третьего умножителей, при этом выход второго умножителя соединен со вторым входом первого сумматора, выход первого умножителя соединен со вторым выходом второго сумматора, а выход третьего умножителя соединен со вторым входом третьего сумматора.
| ТРЕХКОМПОНЕНТНЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 1998 |
|
RU2140088C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ И УГЛОВОЙ СКОРОСТЕЙ И УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1994 |
|
RU2097700C1 |
| Устройство для измерения угловой скорости | 1991 |
|
SU1793382A1 |
| JP 5060786 A, 12.03.1993 | |||
| US 5915275 A, 22.06.1999. | |||

