Изобретение относится к измерительной технике и может использоваться в бесплатформенных инерциальных навигационных системах.
Известны трехкомпонентные измерители угловой скорости, содержащие три однокомпонентных гироскопических датчика угловой скорости и вычислитель, вырабатывающий корректирующие сигналы и вычисляющий величину каждой составляющей вектора угловой скорости [Рахтиенко Е.Р. Гироскопические системы ориентации, 1989, с.144-157]. Однако такие устройства не учитывают влияние проекций абсолютной угловой скорости основания на начальные положения осей собственного вращения гироскопических датчиков угловой скорости.
Известны трехкомпонентные измерители угловой скорости, содержащие три однокомпонентных гироскопических датчика угловой скорости и блок электроники, вырабатывающий корректирующие сигналы, связанные с наличием методической погрешности от вращательного движения основания относительно оси, перпендикулярной к оси чувствительности и к оси подвеса гироузла; и вычисляющий величину каждой составляющей вектора угловой скорости (Патент России №2140088, МПК6 G 01 Р 9/02, опуб. БИ №29, 20.10.99).
Однако такие устройства устраняют погрешности от влияния перекрестных угловых скоростей только для гироскопических датчиков угловой скорости, но не подходят для трехкомпонентных измерителей угловой скорости, содержащих другие (негироскопические) датчики угловой скорости.
Задачей настоящего изобретения является уменьшение погрешностей трехкомпонентного измерителя угловой скорости, имеющего в своем составе негироскопические однокомпонентные датчики угловой скорости, вызванных влиянием перекрестных угловых скоростей, действующих относительно осей, перпендикулярных измерительным осям датчиков угловой скорости. Это позволит измерять угловые скорости, не содержащие составляющих, обусловленных влиянием перекрестных угловых скоростей на показания каждого датчика угловой скорости.
Указанная задача достигается тем, что в трехкомпонентный измеритель угловой скорости, содержащий первый, второй и третий датчики угловой скорости с взаимно перпендикулярными измерительными осями, дополнительно введены первый, второй и третий трехвходовые сумматоры, первый, второй, третий, четвертый, пятый и шестой инвертирующие усилители, причем первый вход первого трехвходового сумматора соединен с выходом первого датчика угловой скорости, первый вход второго трехвходового сумматора соединен с выходом второго датчика угловой скорости, первый вход третьего трехвходового сумматора соединен с выходом третьего датчика угловой скорости, входы первого и второго инвертирующих усилителей соединены с выходом первого датчика угловой скорости, входы третьего и четвертого инвертирующих усилителей соединены с выходом второго датчика угловой скорости, входы пятого и шестого инвертирующих усилителей соединены с выходом третьего датчика угловой скорости, второй и третий входы первого трехвходового сумматора соединены с выходом третьего и пятого инвертирующих усилителей, второй и третий входы второго трехвходового сумматора соединены с выходом первого и шестого инвертирующих усилителей, второй и третий входы третьего трехвходового сумматора соединены с выходом второго и четвертого инвертирующих усилителей, датчики угловой скорости могут быть выполнены в виде волоконно-оптических датчиков угловой скорости, или в виде роторных вибрационных гироскопов, или в виде лазерных гироскопов, или в виде микромеханических гироскопов, а также коэффициент усиления каждого из инвертирующих усилителей зависит от степени влияния угловой скорости, измеряемой тем датчиком угловой скорости, выход которого соединен со входом инвертирующего усилителя, на датчик угловой скорости, выход которого соединен с первым входом трехвходового сумматора, другой вход которого соединен с выходом инвертирующего усилителя.
На чертеже приведен пример конструктивной схемы трехкомпонентного измерителя угловой скорости.
Он состоит из трех каналов. По каждому из каналов установлены: 1, 2 и 3 - датчик угловой скорости; 4, 5, 6, 7, 8 и 9 - инвертирующие усилители; 10, 11 и 12 - трехвходовый сумматор. Выходы датчиков угловой скорости 1, 2 и 3 соединены с входами инвертирующих усилителей 4 и 5, 6 и 7, 8 и 9 соответственно. Выходы датчиков угловой скорости 1, 2 и 3 также соединены с первыми входами сумматоров 10, 11 и 12 соответственно. Второй и третий входы сумматора 10 соединены с выходами инвертирующих усилителей 6 и 8 соответственно. Второй и третий входы сумматора 11 соединены с выходами инвертирующих усилителей 4 и 9 соответственно. Второй и третий входы сумматора 12 соединены с выходами инвертирующих усилителей 5 и 7 соответственно.
Трехкомпонентный измеритель угловой скорости повышенной точности, входящий в состав бесплатформенной инерциальной навигационной системы, работает следующим образом. Сигналы с датчиков угловой скорости 1, 2 и 3, пропорциональные проекции абсолютной угловой скорости основания на ось OX, OY и OZ, поступают на входы инвертирующих усилителей 4 и 5, 6 и 7, 8 и 9 соответственно. Сигналы с датчиков угловой скорости 1, 2 и 3 также поступают на первые входы трехвходовых сумматоров 10, 11 и 12. С выхода инвертирующего усилителя 4 сигнал поступает на второй вход трехвходового сумматора 11. С выхода инвертирующего усилителя 5 сигнал поступает на второй вход трехвходового сумматора 12. С выхода инвертирующего усилителя 6 сигнал поступает на второй вход трехвходового сумматора 10. С выхода инвертирующего усилителя 7 сигнал поступает на третий вход трехвходового сумматора 12. С выхода инвертирующего усилителя 8 сигнал поступает на третий вход трехвходового сумматора 10. С выхода инвертирующего усилителя 9 сигнал поступает на третий вход трехвходового сумматора 11. На выходах сумматоров 10, 11 и 12 получим соответственно три сигнала U(ωx), U(ωy) и U(ωz), пропорциональные проекциям вектора абсолютной угловой скорости основания на осях ОХ, OY, OZ.



где U(ωx), U(ωy) и U(ωz) - выходные сигналы сумматоров 10, 11 и 12 соответственно;
U'(ωx), U'(ωy), U'(ωz) - выходные сигналы датчиков угловой скорости 1, 2 и 3 соответственно;
 ,
,  - чувствительность датчика угловой скорости, ось чувствительности которого ОХ, к проекции абсолютной угловой скорости на оси OY и OZ соответственно;
- чувствительность датчика угловой скорости, ось чувствительности которого ОХ, к проекции абсолютной угловой скорости на оси OY и OZ соответственно;
 ,
,  - чувствительность датчика угловой скорости, ось чувствительности которого OY, к проекции абсолютной угловой скорости на оси ОХ и OZ соответственно;
- чувствительность датчика угловой скорости, ось чувствительности которого OY, к проекции абсолютной угловой скорости на оси ОХ и OZ соответственно;
 ,
,  - чувствительность датчика угловой скорости, ось чувствительности которого OZ, к проекции абсолютной угловой скорости на оси ОХ и OY соответственно.
- чувствительность датчика угловой скорости, ось чувствительности которого OZ, к проекции абсолютной угловой скорости на оси ОХ и OY соответственно.
Здесь каждое уравнение определяет одну компоненту абсолютной угловой скорости основания.
Проведенное моделирование показало, что при использовании данной конструктивной схемы трехмерного измерителя угловой скорости погрешности, вызванные влиянием перекрестных угловых скоростей, действующих относительно осей, перпендикулярных измерительным осям датчиков угловой скорости, уменьшаются на порядок.
Таким образом, использование изобретения позволяет измерять угловые скорости, не содержащие составляющих, обусловленных влиянием перекрестных угловых скоростей, действующих относительно осей, перпендикулярных измерительным осям датчиков угловой скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХКОМПОНЕНТНЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2002 |
|
RU2210780C1 |
| ТРЕХКОМПОНЕНТНЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2001 |
|
RU2196995C1 |
| ТРЕХКОМПОНЕНТНЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 1998 |
|
RU2140088C1 |
| Трехкомпонентный измеритель угловой скорости | 2024 |
|
RU2828994C1 |
| Трехкомпонентный измеритель угловой скорости | 2023 |
|
RU2803452C1 |
| ТРЕХКОМПОНЕНТНЫЙ СТРУЙНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2017 |
|
RU2654308C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ | 1991 |
|
RU2006868C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ (ВАРИАНТЫ) | 1996 |
|
RU2114395C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СЕЙСМОПРИЕМНИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2209449C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЗАБОЙНЫХ СКВАЖИН | 2001 |
|
RU2204712C2 |
Изобретение относится к измерительной технике и может использоваться в бесплатформенных инерциальных навигационных системах. Трехкомпонентный измеритель угловой скорости содержит три датчика угловой скорости с взаимно перпендикулярными измерительными осями, три трехвходовых сумматора, шесть инвертирующих усилителей, причем первые входы трехвходовых сумматоров соединены с выходами соответствующих датчиков угловой скорости, входы первого и второго инвертирующих усилителей соединены с выходом первого датчика угловой скорости, входы третьего и четвертого инвертирующих усилителей соединены с выходом второго датчика угловой скорости, входы пятого и шестого инвертирующих усилителей соединены с выходом третьего датчика угловой скорости, второй и третий входы первого трехвходового сумматора соединены с выходом третьего и пятого инвертирующих усилителей, второй и третий входы второго трехвходового сумматора соединены с выходом первого и шестого инвертирующих усилителей, второй и третий входы третьего трехвходового сумматора соединены с выходом второго и четвертого инвертирующих усилителей. Датчики угловой скорости могут быть выполнены в виде волоконно-оптических датчиков угловой скорости, или в виде роторных вибрационных гироскопов, или в виде лазерных гироскопов, или в виде микромеханических гироскопов. Коэффициент усиления каждого из инвертирующих усилителей зависит от степени влияния угловой скорости, измеряемой тем датчиком угловой скорости, выход которого соединен со входом инвертирующего усилителя, на датчик угловой скорости, выход которого соединен с первым входом трехвходового сумматора, другой вход которого соединен с выходом инвертирующего усилителя. Техническим результатом является уменьшение погрешностей измерителя. 1 ил.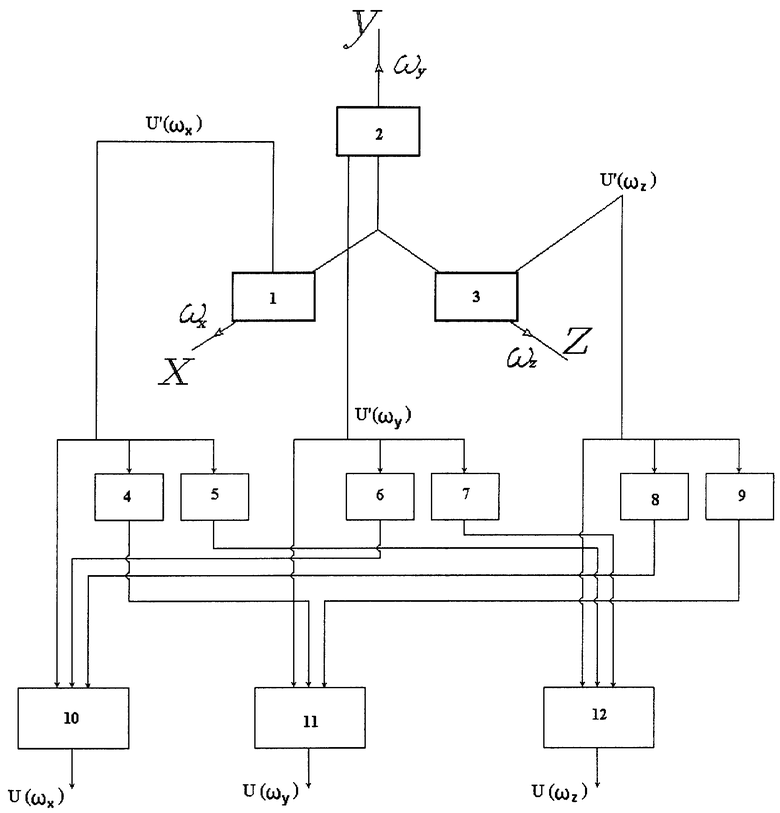
Трехкомпонентный измеритель угловой скорости, содержащий первый, второй и третий датчики угловой скорости с взаимно перпендикулярными измерительными осями, отличающийся тем, что в него дополнительно введены первый, второй и третий трехвходовые сумматоры, первый, второй, третий, четвертый, пятый и шестой инвертирующие усилители, причем первый вход первого трехвходового сумматора соединен с выходом первого датчика угловой скорости, первый вход второго трехвходового сумматора соединен с выходом второго датчика угловой скорости, первый вход третьего трехвходового сумматора соединен с выходом третьего датчика угловой скорости, входы первого и второго инвертирующих усилителей соединены с выходом первого датчика угловой скорости, входы третьего и четвертого инвертирующих усилителей соединены с выходом второго датчика угловой скорости, входы пятого и шестого инвертирующих усилителей соединены с выходом третьего датчика угловой скорости, второй и третий входы первого трехвходового сумматора соединены с выходом третьего и пятого инвертирующих усилителей, второй и третий входы второго трехвходового сумматора соединены с выходом первого и шестого инвертирующих усилителей, второй и третий входы третьего трехвходового сумматора соединены с выходом второго и четвертого инвертирующих усилителей, причем датчики угловой скорости могут быть выполнены в виде волоконно-оптических датчиков угловой скорости, или в виде роторных вибрационных гироскопов, или в виде лазерных гироскопов, или в виде микромеханических гироскопов.
| ТРЕХКОМПОНЕНТНЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 1998 |
|
RU2140088C1 |
| ТРЕХКОМПОНЕНТНЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2002 |
|
RU2210780C1 |
| ТРЕХКОМПОНЕНТНЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2001 |
|
RU2196995C1 |
| Трехкомпонентный измеритель угловой скорости | 1975 |
|
SU634212A1 |
| JP 5060786 А, 12.03.1993. | |||

