/1зобретение относится к гироскопическим устройствам бесплатформенных инер- циальных навигационных систем и предназначено для измерения угловой скорости объекта.
Известно устройство для измерения уг- ловс и скорости объекта, построенное на основ ; двух гирокамер с гиромоторами, погр уженными в вязкую жидкость, датчиков углов, датчиков моментов, цепи обратной связи типа электрическая пружина, цепи электрического спаривания, которая ликвидирует методические погрешности, вызванные влиянием боковой составляющей а)Ј: и неравномерным вращением основания с угловой скоростью УЕ. Однако данное устройство имеет один диапазон измерений, большие габаритно-массовые характеристики и малую стойкость к механическим врзг ущениям в полете.
Чаиболее близким по технической сущности и достигаемому эффекту к изобретению является устройство для измерения утлозой скорости объекта, состоящие из коргуса со слабовязкой жидкостью, в кото- погружен гироузел с гиромотором, датI
чика угла, датчика момента, генератора тактовых импульсов, блока формирования выходного сигнала, блока задания временного интервала, блока управления.
Данное устройство является многодиапазонным прибором бесплатформенных инерциальных навигационных систем, имеющим малые габаритно-весовые характеристики и устойчивым к механическим возмущениям в полете благодаря импульс- но-инерциэльному способу измерения угловой скорости.
Однако данное устройство при применении в составе навигационной системы имеет методические погрешности из-за влияния боковой составляющей угловой ско-; рости сое и вращения основания вокруг оси подвеса гиромотора ОХ, которая проявляется в данном устройстве даже при равномерном вращении основания и увеличивается со временем.
Целью изобретения является повышение точности устройства путем ликвидации его методических погрешностей, обуслов- денных вращением основания с угловой ; скоростью шеи влиянием «Ј.
Ё
Si ю
СА 00 DO 43
Цель достигается тем, что устройство для измерения угловой скорости, содержащее корпус, заполненный слабовязкой жидкостью, в которой размещен гироузел, датчик угла, датчик момента, генератор тактовых импульсов, а также последовательно соединенные блок формирования выходного сигнала, блок задания временного интервала, блок управления, отличается тем, что с целью повышения точности измерений путем уменьшения методических погрешностей в него введены второй гироузел с противоположно направленным вектором кинетического момента, второй датчик угла, второй датчик момента, первый, второй, третий и четвертый сумматоры и усилитель, при этом первый и второй датчики угла соединены соответственно с первым и вторым входами первого и четвертого сумматоров, выход первого сумматора соединен через усилитель с первыми входами второго и третьего сумматоров, вторые входы которых соединены с выходом блока управления, выход второго сумматора соединен с первым датчиком момента, выход третьего сумматора - с вторым датчиком момента, а выход четвертого сумматора соединен с входом блока формирования выходного сигнала.
Заявляемое устройство отличается от прототипа наличием новых элементов: второго гироузла с гиромотором, датчика угла, датчика моментов, цепи электрического спаривания. Таким образом, данное техническое решение соответствует критерию новизна.
В научно-технической литературе не обнаружено технических решений с указанной совокупностью признаков. Следовательно, заявляемое техническое решение соответствует критерию существенные отличия.
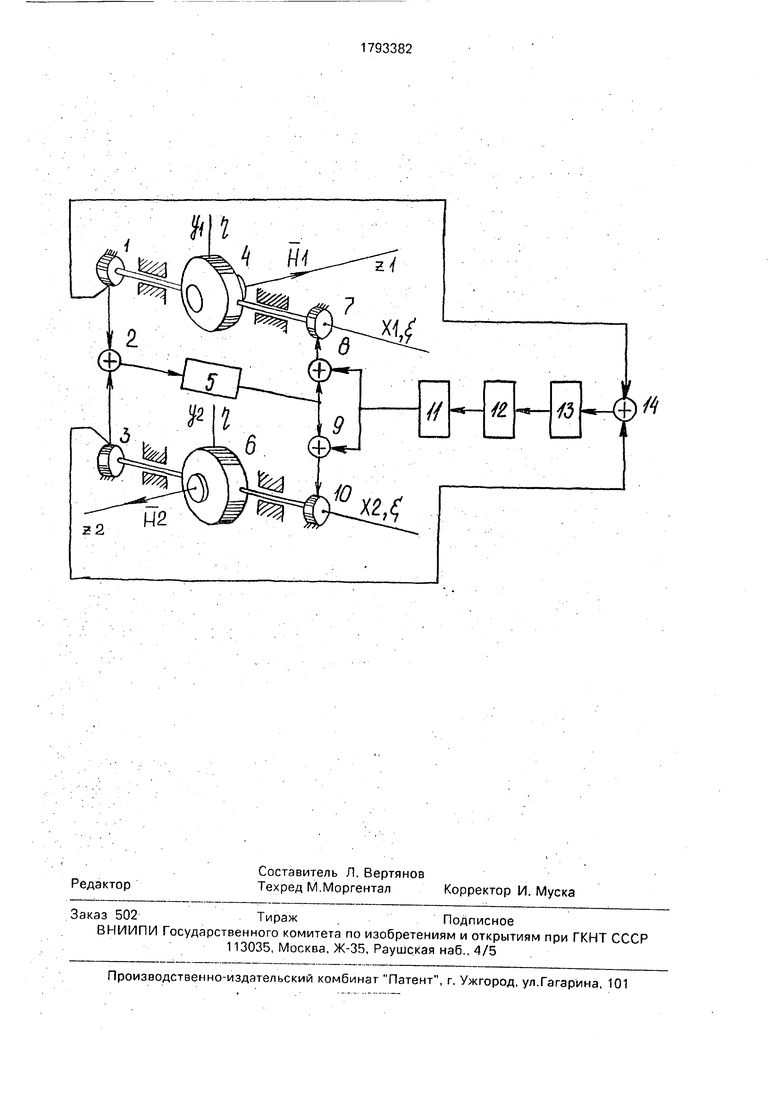
На чертеже изображена принципиальная схема устройства для измерения угловой скорости.
Устройство имеет корпус со слабовязкой жидкостью, в которую погружены гиро- узлы с первым 4 и вторым б гиромоторами. Информация о положении гиромоторов снимается с первого 1 и второго 3 датчиков углов. Цепь обратной связи предназначена для приведения гиромоторов в исходное состояние и выбора диапазона измерений. Цепь состоит из первого 1, второго 3 датчиков углов, первго 7, второго 10 датчиков моментов, блока 11 управления, блока 12 задания временного интервала, блока 13 формирования выходного сигнала, четвертого 14 сумматора. Первый 7 и второй 10 датчики моментов предназначены для приведения в исходное состояние первого 4,
0
5
0
5
0
5
0
5
0
5
второго б гиромоторов и удержания их в этом положении до начала следующего измерительного цикла. Блок 13 формирования выходного сигнала преобразует углы отклонения первого 4 и второго б гиромоторов в величинуугловой скорости по заданному алгоритму, задает необходимый диапазон работы устройства. Блок 12 задания временного интервала настраивается на заданный диапазон измерения и выдает время измерения ти. Блок 11 управления отключает обратную связь на время измерения и выдает команду на приведение в исходное состояние гиромоторов и удержание их в нем до начала следующего этапа измерений.
Схема электрического спаривания первого 4 и второго 6 гиромоторов предназначена для выравнивания неидентичности параметров гиромоторов, первого 1 и второго 3 датчиков углов, первого 7 и второго 10 датчиков моментов и ликвидации методических погрешностей, образующихся из-за влияния (DE и . Схема состоит из первого 2 сумматора, первый вход которого прямой и подключен к первому выходу первого датчика 1 угла, а второй - инверсный, подключенный к первому выходу второго 3 датчика угла,усилителя 5 цепи спаривания,второго 8 сумматора, на первый инверсный вход которого подается сигнал с выхода усилителя 5, на второй прямой подключен выход блока 11 управления, а выход подключен к входу первого датчика 7 моментов. Выход усилителя 5 цепи спаривания соединен также с первым входом третьего 9 сумматора, к второму входу которого подключен выход блока 11 управления, а выход третьего 9 сумматора соединен с первым входом второго датчика 10 моментов.
Устройство работает следующим образом.
Блок 11 управления разрывает цепь обратной связи, первый 4 и второй 6 гиро- моторы движутся свободно относительно корпуса устройства. Первый 1 и второй 3 датчики углов снимают значения в трех точках измерений (fl, /За. Дз), выходной сигнал через четвертый 14 сумматор подается на блок 13 формирования выходного сигнала, где обрабатывается по заданному алгоритму, аналогичному алгоритму прототипа, значение угловой скорости (i)jj поступает в вычислительное устройство, кроме того, блок 13 выбирает необходимый диапазон измерений и выдает сигнал на блок 12 задания временного интервала. Блок 12 задает измерительный интервал Гц. Блок 11 управления по сигналу с блока 12 управляет работой гиромоторов через первый 7 и второй 10 датчика моментов. В процессе работы устройства сигналы с первого 1 и второго 3 датчиков углов суммируются на первом сумматоре 2. Разность сигналов Д/Зчерезуси- лптель 5 цепи спаривания подается на 8, третий 9 сумматоры и добавки Ксх хД/ разных знаков подаются на первый 7, второй 10 датчики моментов, которые производят выравнивание движения первого 4, второго б гиромоторов, тем самым компен- неидентичность параметров гиромо- тс ров, полученную при их изготовлении.
При исследовании устройства установлено, что погрешность измерения угловой ct орости от вращения основания вокруг оси подвеса составит .
АКс-| , Кс2 HI ч
()
НИ Кс, Н2 г/:е Дм яг- погрешность измерения угловой
спорости;
Hi, N2 - кинематические моменты пер- вс го и второго гиромоторов;
KCI , КС2 коэффициенты усиления цепи сг аривания первый - второй гиромотор и второй - первый ;
(ак угловая скорость вращения основания, на котором установлено устройство;
ги - временной интервал измерений.
Принимая допустимый разброс параметров Hi и R2, К с1 и Кс2 не более 1%, полКС2 Hi учаем tQT H 1
следовательно, Д.Мм 0. Погрешность от вращения основания вокруг оси подвеса исчезает. Цепь спаривания в процессе измерения устраняет нейдентичность параметров гиромоторов Hi и Н2, АУй. А, КДУ1 и КДУ2, КДм1 и КДм2. Установлено
кДУ1 н2 2 -AI
ДбУ
24 Ai 2 A2 2
(115
20
25
КДУ2 А2. Hi
z-) :0)Ј Ги , Кду1 -АИ ;Н22 -17 д
где КдУ1, КДУ2 - коэффициенты датчиков углов; .. .: .. ; . .. /
AL А2 моменты инерции роторов гиромоторов;....;. ..: - . .-. -....- (i) - составляющая угловой скорости
по оси (1)Ј;: :
КДм1, КДМ2 - коэффициенты датчиков моментов.: .: : . : . ;
Следовательно, погрешность измерений 0. Методические погрешности данных видов для устройства устраняются,
точность измерения 3%.
Wi
повышается на

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения угловой ско-РОСТи | 1979 |
|
SU838584A1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| Установка для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях | 2020 |
|
RU2743640C1 |
| ДВУХОСНЫЙ ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВЫХ СКОРОСТЕЙ С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1993 |
|
RU2118796C1 |
| СПОСОБ ПРОВЕРКИ РАБОТОСПОСОБНОСТИ ТРЕХСТЕПЕННОГО ГИРОСКОПА С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1994 |
|
RU2117917C1 |
| Гирополукомпас с аналитической азимутальной коррекцией | 2023 |
|
RU2799738C1 |
| Система формирования выходного сигнала блоков демпфирующих гироскопов | 2017 |
|
RU2676049C1 |
Лспользование: для измерения угловой ско| ости с помощью гироскопических устройств бесплатформенных инерциальных навигационных систем. Сущность изобретения: сигналы с первого и второго датчиков угла суммируются. Разность сигналов Л/ через усилитель цепи подается на второй, третий сумматоры и добавки Кс А/ разных знаков подаются на первый и второй датчики момента, которые производят выравнивание движения первого и второго ги- ромоторов, тем самым компенсируя неидентичность параметров гиромоторов, что обеспечивает повышение точности измерения за счет уменьшения методических погрешностей. 1 ил.
Формула изобретения
Устройство для измерения угловой ско- рссти, содержащее корпус, .заполненный слабовязкой жидкостью, в которой размещен гироузел, датчик угла, датчик момента, ге нератор тактовых импульсов, а также поел эдовательно соединенные блок формирования выходного сигнала, блок задания временного интервала, блок управления, отличающееся тем, что, с целью повышения точности измерений путем уменьшения методических погрешностей, в него введены второй гироузел с противоположно направленным вектором кинетического момента, второй датчик угла, второй датчик момента, с первого по четвертый сумматоры и усилитель, при этом первый и второй датчики угла соединены соответственно с первым и вторым входами первого и четвертого сумматоров, выход первого сумматора соединен через усилитель с первыми входами второго и третьего сумматоров, вторые входы которых соединены с выходом блока управления, выход второго сумматора соединен с первым датчиком момента, выход третьего сумматора-с вторым датчиком момента, а выход четвертого сумматора - с входом блока формирования выходного сигнала.
| Устройство для измерения угловой ско-РОСТи | 1979 |
|
SU838584A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
