1
Изобретение относится к следящим электроприводам с бесконтактным двигателем постоянного тока и может быть использовано для увеличения их быстродействия.
Известны бескон1актный следящий электропривод постоянного тока, содержащий последовательно соединенные измеритель рассогласования, предварительный усилитель, широтно-импульсный модулятор, бесконтактный двигатель постоянного тока, выход которого через редуктор соединен со входом измерителя рассогласования, а также релейный элемент. Ьыход последнего подключен ко входу бесконтактного двигателя постоянного тока, на валу которого установлен тахогенератор, связанный с корректирующим устройством.
предлагаемый электропривод отличается тем, что целью повышения быстродействия привода, он содержит элемент сравнения, первый вход которого соединен с выходом предварительного усилителя, второй - с выходом корректирующего устройства, а выход - со входом релейного элемента.
Это позволяет путем нелинейной деформации кривой вращающего момента двигателя, вносимой релейным элементом при работе системы, формировать фазовую характеристику системы, не изменяя его амплитудной характеристики, что увеличивает быстродействие системы.
2
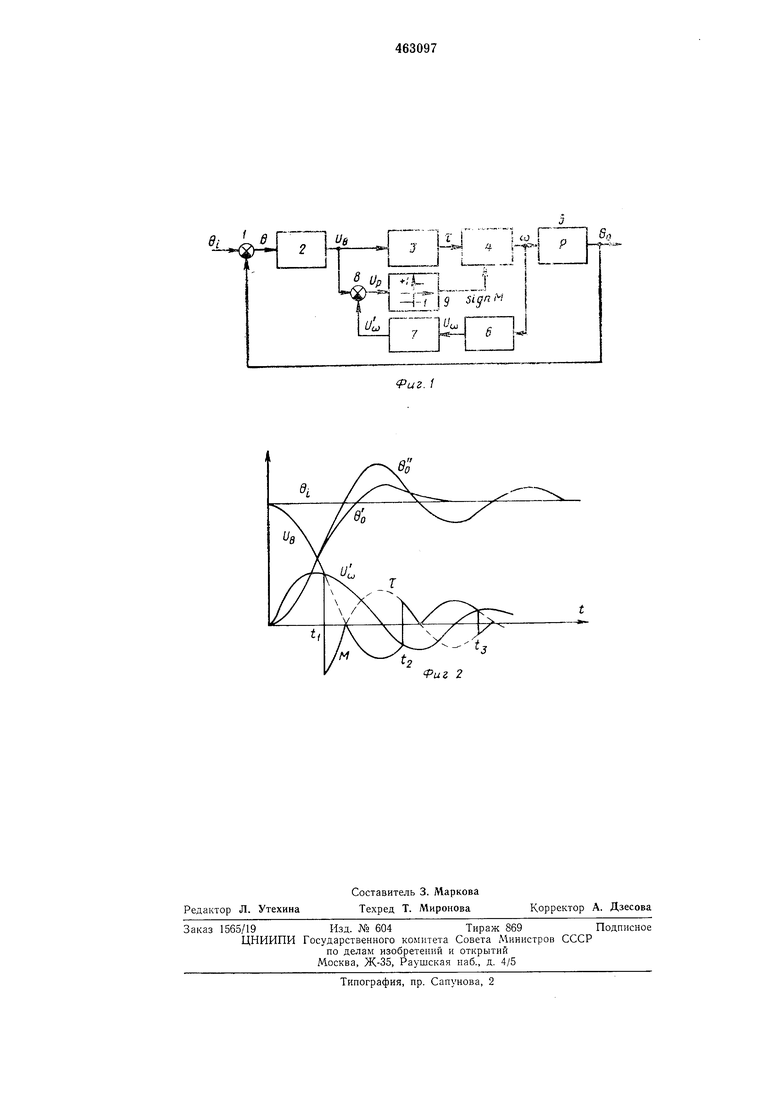
На фиг. 1 представлена функциональная схема предлагаемого следящею электропривода; на фиг. 2 - эпюры переходных процессов в приводе при отработке скачкообразного
входного воздействия.
Измеритель рассогласования 1 выявляется и преобразует в напряжение разность И между входным 01 и выходным GO углами системы. Рассогласование системы усиливается предварптельным усилителем 2, выходное напряжение и,:, которого подключено ко входу щиротно-импульсного модулятора 3, регулирующего относительную длительность импульсов на обмотках бесконтактного двигателя постоянного тока 4. Бал двигателя через редуктор 5 связан с измерителем рассогласования 1 и тахогенератором б.
Выходное напряжение и,„ тахогенератора подключено к корректирующему устройству 7, выход которого соединен с одним из входов элемента сравнения 8. На второй вход элемента сравнения подключеп выход предварительного усилителя 2, а его выходное напряжение Up подключено ко входу релейного элемента 9. Этот релейный элемент определяет знак вращающего момента М двигателя, т. е. sign М, п поэтому уровни его выходных сигналов на схеме условно показаны как «+ 1 и «-1.
Таким образом, в предложенной системе напряжение с выхода корректирующего устройства в цепи скоростной обратной связи по скорости подключено через элемент сравнения на вход релейного элемента, определяюniero знак вращающего момента двигателя. Это позволяет получить существенное увеличение быстродействия системы для ослабления коэффициента передачи контура системы.
Система работает следующим образо.м.
При подаче скачкообразного входного сигнала Эь при вращении двигателя на вход релейного элемента наряду с напряжением, UB рассогласования поступает дополнительный сигнал и. В связи с этим выходное напряжение t/p элемента сравнения меняет свой знак в некоторый момент времени , т. е. раньще согласования осей системы. Поэтому при релейный элемент переключается в положение «-1, двигатель переводится в режим противовключения, и система подходит к согласованному положению с меньщим запасом кинетической энергии. Это уменьщает перерегулирование скорректированной системы (кривая 6 на фиг. 2) по сравнению с нескорректированной системой без скоростной обратной связи (кривая Од на
фиг. 2).
Если кривая бд в скорректированной системе имеет колебательный характер, то описанное «подтормаживание имеет место каждый раз при подходе системы к установивщемуся состоянию, начиная с момента времени
ti. и, t,.
Из кривой момента М на фиг. 2 видно, что в описанной следящей системе его первая гармоника приобретает положительный фазовый сдвиг по отношению к напряжению (Ун, причем амплитуда ее по существу не отличается от амплитуды первой гармоники движущего момента в нескорректированной системе.
Таким образом, в предложенной системе путем изменения коэффициента тахогенератора
6 и параметров устройства 7 можно существенно уменьщить колебательность системы, т. е. увеличить ее быстродействие без ослабления коэффициента передачи разомкнутого контура.
Предмет изобретения
Бесконтактный следящий электропривод постоянного тока, содержащий последовательно
соединенные измеритель рассогласования, предварительный усилитель, щиротно-импульсный модулятор, бесконтактный двигатель постоянного тока, выход которого через редуктор соединен со входом измерителя рассогласования, а также релейный элемент, выход которого подключен ко входу бесконтактного двигателя постоянного тока, на валу которого установлен тахогенератор, связанный с корректирующим устройством, отличающийс я тем, что, с целью повыщения быстродействия привода, он содержит элемент сравнения, первый вход которого соединен с выходом предварительного усилителя, второй - с выходом корректирующего устройства, а выход подключен ко входу релейного элемента.
в
ft

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1975 |
|
SU545969A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU474787A1 |
| Следящая система | 1979 |
|
SU847275A1 |
| Следящая система | 1975 |
|
SU608119A1 |
| Бесконтактная следящая система постоянного тока | 1979 |
|
SU930238A2 |
| СЛЕДЯЩАЯ СИСТЕМА | 1978 |
|
SU1840029A1 |
| Следящая система | 1977 |
|
SU734610A1 |
| Бесконтактная следящая система постоянного тока | 1973 |
|
SU470783A1 |
| Бесконтактный следящий привод постоян-НОгО TOKA | 1979 |
|
SU853606A1 |
| Бесконтактный следящий электропривод постоянного тока | 1975 |
|
SU566235A1 |
fuz 2
