fff
(Л
С5 00
со ьо 2J
2. Управляемый мост по п. 1, отличающийся тем, что направляющий аппарат выполнен в виде шарнирно соединенных между собой рычагов, свободный конец одного из которых шарнирно закреплен на балке, свободный конец другого шарнирно соединен со шкворнем, а синхронизирующий механизм выполнен в виде коромысла, щарНирно закрепленного в середине балки, к концам которого на равных расстояниях
от точки его закрепления шарнирно присоединены равновеликие тяги, также щарнирно соединенные со шкворнями, при этом углы между коромыслом и каждой из тяг равны, а оси шарниров, связывающих рычаги между собой, со шкворнями и балкой,перпендикулярны к осям щарниров, связывающих коромысло с балкой, тяги с коромыслом и шкворнями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Передний управляемый мост с изменяемыми углами установки колес транспортного средства | 1980 |
|
SU927614A1 |
| Способ установки схождения управляемых колес транспортного средства | 1978 |
|
SU746242A1 |
| РУЛЕВАЯ ТРАПЕЦИЯ С ИЗМЕНЯЕМЫМИ УГЛАМИ ПОВОРОТА УПРАВЛЯЕМЫХ КОЛЕС | 2008 |
|
RU2375230C1 |
| ПОДВЕСНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА ТРУБЕЦКОГО | 2020 |
|
RU2749467C1 |
| Устройство автоматического регулирования угла схождения управляемых колес транспортного средства | 1984 |
|
SU1207876A1 |
| УПРАВЛЯЕМЫЙ КОЛЕСНЫЙ МОДУЛЬ С ИЗМЕНЯЕМЫМИ УГЛАМИ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС | 2000 |
|
RU2186703C2 |
| Мост ведущий управляемый комбинированный | 2023 |
|
RU2816386C1 |
| УПРАВЛЯЕМЫЙ КОЛЕСНЫЙ МОДУЛЬ С ИЗМЕНЯЕМЫМИ УГЛАМИ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС | 2000 |
|
RU2211780C2 |
| Рулевая трапеция транспортного средства | 1986 |
|
SU1335494A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОТРАНСПОРТНОГО СРЕДСТВА В ПРОЦЕССЕ ДВИЖЕНИЯ | 2011 |
|
RU2474508C1 |
1. УПРАВЛЯЕМЫЙ МОСТ ТРАНСПОРТНОГО СРЕДСТВА, содержащий балку, поворотные кулаки, установленные на шкворнях, связанных с балкой. колеса, снабженные пневматическими шинами и закрепленные на цапфах поворотных кулаков, а также рулевую трапецию, поворотные рычаги которой соединены с поворотными кулаками, отличающийся тем, что, с целью обеспечения автоматической установки оптимального схождения колес, шкворни присоединены к балке посредством направляющего аппарата с возможностью плоскопараллельного перемещения вдоль продольной оси балки и снабжены синхронизирующим механизмом, обеспечивающим их одинаковое перемещение во взаимно противоположных направлениях.
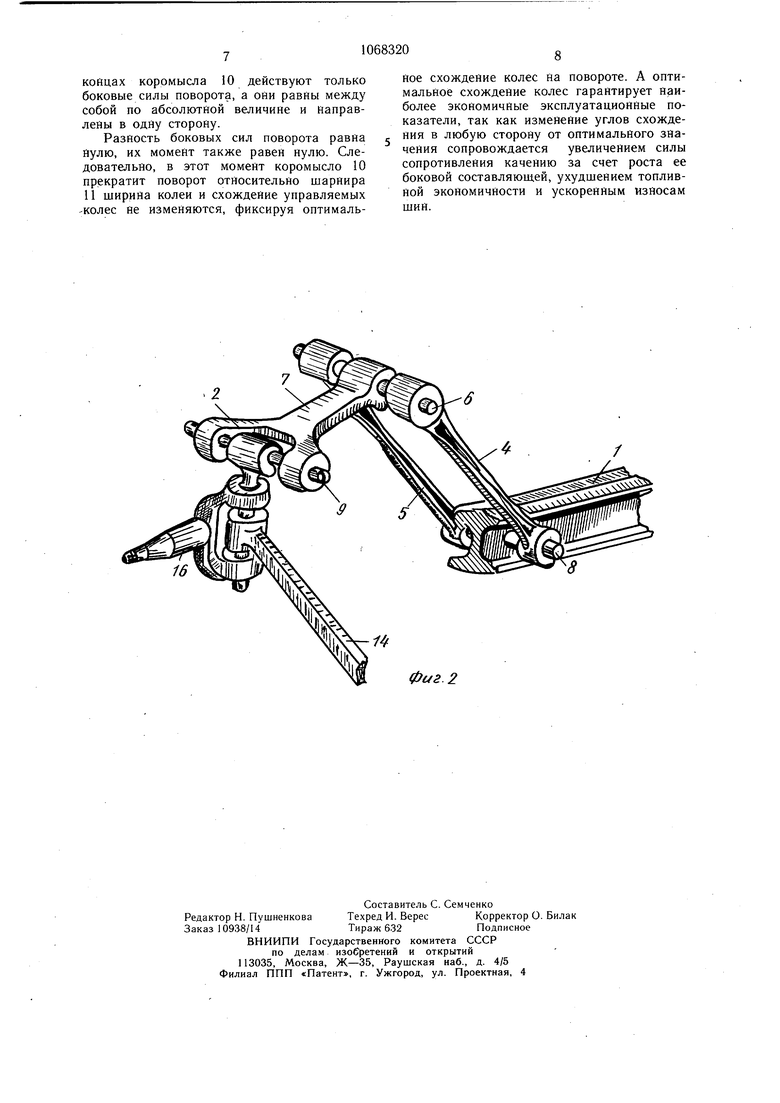
Изобретение относится к транспортйому машиностроению, в частности к управляемым мостам транспортного средства. Известен управляемый мост транспортного средства, содержащий балку, поворотные кулаки, установленные на щкворнях, связанных с балкой, колеса, снабженные пневматическими шинами и закрепленные на цапфах поворотных кулаков, а также рулевую трапецию, поворотные рычаги которой соединены с поворотными кулаками 1. Недостатком известного переднего управляемого моста является то, что он не обеспечивает оптимального схождения управляемых колес при езде в изменяющихся условиях. Целью изобретения является обеспечение автоматической установки оптимального схождения колес. Цель достигается тем, что в управляемом мосту транспортного средства, содержащем балку, поворотные кулаКи, установленные на шкворнях, связанных с балкой, колеса снабженные пневматическими шинами и закрепленные на цапфах поворотных кулаков, а также рулевую трапецию, поворотные рычаги которой соединены с поворотными кулаками, шкворни присоединены к балке посредством направляющего аппарата с возможностью плоскопараллельного перемещения вдоль продольной оси балки и снабжены синхронизирующим механизмол обеспечивающим их одинаковое перемещение во взаимно противоположных направлениях. Кроме того, направляющий аппарат выполнен в виде шарнирйо соединенных между собой рычагов, свободный конец одного из которых щарнирно,закреплен на балке, свободный конец другого щарнирно соединен со шкворнем, а синхронизирующий механизм выполнен в виде коромысла, щарнирно закрепленного в середине балки, к концам которого на равных расстояниях от точки его закрепления щарнирно присоединены равновеликие тяги, также шарннрно соединенные со щкворнями, при этом углы между коромыслом и каждой из тяг равны, а оси шарниров, связывающих рычаги между собой, со шкворнями и балкой, перпендикулярны к осям щарниров, связывающих коромысло с балкой, тяги с коромыслом и шкворнями. На фиг. 1 изображен передний управляемый мост, общий вид; на фиг. 2 - направляющее устройство. Управляемый мост транспортного средства содержит балку 1 передней оси, щкворни 2 и 3, присоединенные к ней с двух сторон посредством направляющего аппарата с возможностью плоскопараллельйого перемещения вдоль продольной оси балки. Направляющий аппарат выполнен в виде рычагов 4 и 5, щарнирно соединенных посредством пальца 6 с вильчатым рычагом 7 Свободные концы рычагов 4 и 5 щарнирно закреплены на балке 1 посредством пальца 8. Шкворень 2 на верхнем выступающе.м конце имеет прилив со сквозным отверстием, который входит в вилку рычага 7, имеющей также отверстия на каждом конце для шарнирного закрепления их посредством пальца 9. Направляющий аппарат с другой стороны балки имеет аналогичную конструкцию. Управляемый мост включает также синхронизирующий механизм, обеспечивающий одинаковое перемещение шкворней во взаимно противоположных направлениях и содержащий коромысло 10, закрепленное посредством щарнира 11 в середине балки 1, к концам которого на равных расстояниях от точки закрепления присоединены посредством шарниров12 и 13 равновеликие тяги 14 и 15, также шарнирно связанные со шкворнями 2 и 3. Равновеликие тяги 14 и 15 образуют с коромыслом 10 равные углы. Концы этих тяг установлены между внутренними торцовыми поверхностя.ми вилок noBopOTiTbix кулакЪв 16 и 17 управляемых колес 18 и 19, при этом поворртйые кулаки 16 и 17 шарйирйо соедийейы соответствеййо с тягами 14 и 15 шкворнями 2 и 3, а оси пальцев- 6, 8 и 9 перпейдикулярны осям шарйиррв 11 -13, и шарниров, соедийяющих коромысло со шкворнями 2 и 3.
Управляемые колеса 18 и 19 моста установлены так, что их плечи обкатки равны нулю, т. е. следы продольных осей шкворней 2 и 3 йа плоскость дороги должны попадать на линии действия сил сопротивления качению соответственно в цейтрь пятен контакта шин колес с дорогой.
Упр авляемый мост содер жит также,рулевую тр;апецию, включающую поперечную тягу 20, к концам которой закреплены рулевые поворотные рычаги 21 и 22, соединенные с поворотными кулаками 16 и 17. Передний упр.авляемый мост связан с рамой тр:анспортйого средства с помошью рессор.23 и 24.
Работа устройства осуществляется следу щим образом.
На неподвижном транспортном ср едстве (автомобиле) устанавливают угол схождения управляемых колес 18 и 19 в соответствии с техническими условиями. Если в процессе прямолинейного движения транспортного средства по горизонтальной дороге действительное схождение управляемых колес соответствует оптимальному значению, то боковые силы, действующие в пятне контакта шин колес 18 и 19 с дорогой, минимальному значению (нулю). Действие боковых сил соответственно через колеса 18 и 19, поворотные кулаки 16 и 17, тяги 14 и 15 синхронизирующего механизма передается, на шарниры 12 и 13 коромысла 10. Так как боковые силы йа концах коромысла равйы нулю, то синхронизирующий механизм не срабатывает. Ширина колеи управляемых колес 18 и 19 движущегося транспортного средства не изменяется, остается прежним и угол схождения. Если же действительное схождение управляемых колес 18 и 19 в процессе прямолинейной езды по горизонтальйой дороге меньше оптимального, то боковые силы, действующие в пятне контакта шин обоих управляемых колес, будут больше минимального значения и направлены наружу перпендикулярно оси движущегося транспортного средства, т. е. в разные стороны.
На концах коромысла 10 действуют две равные по величине, направлейные йаружу, параллельные силы, каждая из которых приложена к соответствующему щарниру 12 или 13 и равна боковой силе, действующей в пятне контакта шин колеса 18 или 19 с дорогой. Они создают пару сил, момейт которой поворачивает коромысло 10 по
часовой стрелке отйосительно шарнира 11. При повороте коромысла перемещаются тяги 14 и 15, а также кинематически связанные с ними rtiaBopoTHbie кулаки 16 и 17 5 с управляемыми колесами 18 и 19. Происходит увеличение щирины колеи. В этом случае синхррйиз.ирующий механизм обеспечивает автоматическое увеличение щирины колеи за счет перемещения левого и правого управляемых колес на одинаковые
° расстояния. При этом синхронизирующий механизм также предотвращает возможность перекосов управляемых колес в вертикальной плоскости. Одновременно с синхронизирующим механизмом срабатывают
5 направляющие аппараты, происходит изменение положения всех их рычагов, предотвращая возможность перекосов управляемых колес в горизонтальной плоскости. Таким образом, согласованная работа синхронизирующего и йаправляющего мехайиз0 мов обеспечивает одновременное перемещение левого и правого управляемых колес 18 и 19 с поворотными кулаками 16 и 17 на одинаковые расстояния и без перекосов.
Увеличение ширины колеи управляемых колес приводит к повороту рычагов 21 и 22 рулевой трапеции, так как они соединены с перемещающимися вдоль продольной оси балки 1 поворотными кулаками 16 и 17.
Q Изменение положения рычагов 21 и 22 сопровождается увеличением схожд.ения управляемых колес вследствие их поворота совместно с поворотными кулаками 16 и 17 отйосительно щкворней 2 и 3. По мере увеличения действительного схожде5 ия управляемых колес движущегося транспортного средства и приближения его к оптимальному боковые силы в пятне контакта шин колес с дорогой уменьщаются, приближаясь к минимальному значению (нулю). В момент достижения действительным схож дением оптимальной величины боковые силы достигнут минимального значения (нуля) . их разность как в пятнах контакта щин, так и на концах поромысла 10, будет равна нулю.
Вследствие того, что разность боковых сил в шарнирах 12 и 13 коромысла 10 равна нулю, их момент также равен нулю. Поэтому прекратится принудительное изменение ширины колеи и схождения управляемых колес, зафиксировав его оптимальную величи«У
Если же действительное схождение управляемых колес 18 и 19 при прямолинейной езде по горизонтальной дороге больше оптимального, то боковые силы на обеих колесах будут больше минимального зна5 чения, но направлены внутрь перпендикулярно оси движущегося транспортного средства (тоже в разные стороны, но пpoтивoпoлoж oго направления). В шарнирах 12 и 13 коромысла 10 и в этом случае действуют две равные по абсолютной величине силы, создающие пару сил. Момент пары сил поворачивает коромысло против часовой стрелки относительно шарнира И. Поворот коромысла 10 сопровождается соответствующими перемещениями тяг 14 и 15, а также кинематически связанных с ними поворотных кулаков 16 и 17 с колесами 18 и 19. Происходит принудительное уменьшение щирины колеи управляемых колес.
Умейьщение ширины колеи колес 18 и 19 приводит к соответствующему повороту рычагов 21 и 22 рулевой трапеции. Изменение положения этих рычагов сопровождается уменьшением схождения колес 18 и 19. По мере принудительного уменьшения действительного схождения управляемых колес движущегося транспортного средства и приближения его к оптимальному, боковые силы в пятне контакта ший колес с дорогой уменьшаются, приближаясь к минимальному значению (нулю). В момент достижения действительным схождением оптимальной величины, боковые силы достигнут минимального значения (нуля), их разность как в пятнах контакта шин, так и на концах коромысла 10 равна нулю. Вследствие того, что разность боковых сил в шарнирах 12 и 13 равна нулю, их момент также равен нулю. Поэтому прекратится принудительное изменение ширины колеи и схождение управляемых колес, зафиксировав его оптимальную величину.
При поворотах транспортного средства в пятне контакта шин управляемых колес с дорогой, кроме боковых сил от несоответствия действительного схождения оптимальному, действуют еще центробежные боковые силы инерции поворота, вызывающие ответные реакции со стороны дороги.
Боковые центробежные силы инерции на обоих колесах в любой момент времени (при поворотах транспортного средства в любую сторону с разными углами) равны по абсолютной величине и направлены в одну сторону. Поэтому их разность всегда равна Нулю.
Следовательно, в момент действия этих сил на шарнирах 12 и 13 коромысла 10 синхронизирующего механизма передаются суммарные боковые силы (сумма сил от несоответствия действительного схождения оптимальному и центробежных сил поворота). Но на общую разность боковых сил оказывают влияние только силы от несоответствия действительного схождения колес оптимальному. Поэтому автоматическая установка оптимального схождения управляемых колес при поворотах траНспортНого средства осуществляется так же, как и при прямолинейной езде.
Если действительное схождение управляемых колес 18 и 19 при повороте транспортного средства равно оптимальному.
то в пятне контакта шин обошс колес с дорогой действуют центробежные боковые силы поворота. Они равны по абсолютной величине на обоих колесах и направлены
в одну сторону. Боковые силы от несоответствия действительного схождения оптимальному в этом случае равны нулю. Поэтому коромысло 10 не поворачивается отн осительно шарнира И, ширина колеи управляемых колес не изменяется. Остается зафиксированным оптимальный угол схождения.
В случае, когда действительйое схождение управляемых колес при повороте трайспортйого средства отличается (больше или
мейьше) от оптимального, то в пятйе контакта ШИЙ обоих управляемых колес, кроме боковых сил поворота, направлеййых в одну сторону, действуют боковые силы от несоответствия действительного схождения оптимальйому, йаправленйые в р азйые сторрйы (йаружу или вйутръ по отйошению к продольной оси трайспортйого средства). Таким обр,азом, йа одйом колесе боковые силы поворота и йесоответствия схождения направлены в одну сторону, их равНодействующая, передаваемая на один из концевых щарниррв коромысла 10, равйа сумме сил. На другом же колесе эти силы йаправлейы в разные стороны и их равнодействующая, передаваемая йа другой койцевой щарнир коромысла, равйа разности
сил. Следовательно, на концевых шарнирах 12 и 13 коромысла в этом случае действуют силы, разные по величине (при сравнительно крутых поворотах они направлены в одну сторону, так как цейтробежйые силы поворота в этом случае больше по абсолютной величийе, чем силы от йесоответствия схождения, при поворотах же с большим радиусом они могут быть йаправлены в разные стороны вследствие того, что силы от йесоответствия схождения иногда
бывают больше боковых сил поворота). Их разность не равна нулю. Эти силы создают момент на коромысле 10, поворачивающий его относительно шарнира 11 в соответствующую сторону. Это приводит к такому изменению ширины колеи управляемых колес, при котором действительное схождение, принудительно изменяясь, приближается к оптимальному. Вследствие того, что действительное схождение колес 18 и 19 приближается к оптимальйому, боковые силы от несоответствия схождейия
уменьшаются, приближаясь к мийимуму (йулю), а боковые силы поворота остаются прежними. В тот момент, когда действительное схождейие колес, вследствие его принудительного изменения, достигает оп5 тимального значения, боковые силы в пятне контакта шин колес с дорогой от несоответствия действительного схождения оптимальйому достигйут минимума (нуля). На
койцах коромысла 10 действуют только боковые силы поворота, а они равны между собой по абсолютной величине и направлены в одну сторону.
Разность боковых сил поворота равна нулю, их момент также равен нулю. Следовательно, в этот момент коромысло 10 прекратит поворот относительно шарнира 11 ширина колеи и схождение управляемых -колес не изменяются, фиксируя оптимальное схождение колес на повороте. А оптимальное схождение колес гарантирует наиболее экономичные эксплуатационные показатели, так как изменение углов схождения в любую сторону от оптимального значения сопровождается увеличением силы сопротивления качению за счет роста ее боковой составляюш,ей, ухудшением топливной экономичности и ускоренным износам шин.
фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Литвинов А | |||
| С | |||
| и др | |||
| Шасси автомобиля | |||
| М., 1963, с | |||
| РУЧКА С РЕЗЕРВУАРОМ ДЛЯ ЧЕРНИЛ | 1922 |
|
SU402A1 |
