Изобретение относится к радиотехнике и может быть использовано при когерентной демодуляции сигналов с комбинированной амплитудно-фазовой манипуляцией (АФМ).
Известно устройство восстановления несущей частоты сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции, содержащее два фазовых детектора ФД, фазовращатель, сумматор, перемножитель и управляемый генератор (патент РФ № 2019052, МПК (5) Н 04 L 27/22, опубл. БИ №16, 1994 г.) [1].
Недостатком известного устройства является его низкая помехоустойчивость, обусловленная высоким уровнем фазовых шумов колебания восстановленной несущей частоты Sнесущ.=cos(ω 0t+ϕ 0) в окрестности рабочей точки ϕ 0=0° , где ϕ 0 - оценка фазы несущей, получаемая в устройствах восстановления несущей частоты при когерентной демодуляции АФМ сигналов (см., например, Прокис Дж. Цифровая связь. - М.: Радио и связь, 2000, с.284) [3].
При этом высокий уровень фазовых шумов колебания восстановленной несущей частоты связан с высокой дисперсией управляющего напряжения на входе управляемого генератора, которая (дисперсия), в свою очередь, обуславливается так называемым манипуляционным шумом, т.е. шумовым процессом, связанным с информационной последовательностью передаваемых символов {In} даже в отсутствие аддитивного белого гауссовского шума (АБГШ).
Действительно, в известном устройстве напряжение на входе управляемого генератора имеет вид [1]:

где k - постоянный коэффициент;
ϕ 0 - угол фазового рассогласования (оценка фазы несущей);
n1, n2 - шумовые процессы.
Следовательно, при ϕ 0=0° +δ , где δ - малая величина фазового рассогласования, дисперсия величины U даже в отсутствие АБГШ определяется суммой дисперсий процессов n1 и n2, которые являются ненулевыми величинами.
То, что в известном устройстве управляющее напряжение U на входе управляемого генератора связано с шумовыми процессами зависимостью вида (1), определяется тем, что принцип действия известного устройства основан на вычитании из входного сигнала оценок информационных символов  , получаемых в этом же устройстве, что не приводит к появлению манипуляционного шума только при абсолютно точном выполнении равенства ϕ 0=0° .
, получаемых в этом же устройстве, что не приводит к появлению манипуляционного шума только при абсолютно точном выполнении равенства ϕ 0=0° .
При ϕ 0=0° +δ , где δ ≠ 0, в напряжении U возникает манипуляционный шум.
Итак, в конечном итоге низкая помехоустойчивость известного устройства обуславливается использованием таких операций над сигналом, при которых из входного сигнала вычитаются формируемые оценки информационных символов, что приводит к высокой дисперсии управляющего напряжения на входе управляемого генератора, т.е. манипуляционному шуму, даже в случае отсутствия входного АБГШ.
Известно также устройство восстановления несущей частоты сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции, содержащее два фазовых детектора (ФД), фазовращатель, генератор, управляемый напряжением (ГУН), квадратор, перемножитель, петлевой фильтр и сумматор (см. патент РФ №2019054, МПК 5 H 04 L 27/34, опубл. БИ №16, 1994 г.) [2].
Недостатком известного устройства является его низкая помехоустойчивость, обусловленная использованием операций вычитания из входного сигнала оценок информационных символов  , что приводит к высокой дисперсии управляющего напряжения на входе управляемого генератора, т.е. манипуляционному шуму в цепи управления управляемого генератора, даже в случае отсутствия АБГШ.
, что приводит к высокой дисперсии управляющего напряжения на входе управляемого генератора, т.е. манипуляционному шуму в цепи управления управляемого генератора, даже в случае отсутствия АБГШ.
Действительно, как показано в [2], сигнал на входе петлевого фильтра имеет вид

где k1 и k2 - постоянные коэффициенты.
Устройство [2], в отличие от устройства [l], содержит петлевой фильтр, однако в данном случае это отличие не является принципиальным: после фильтрации управляющее напряжение на входе ГУН U=kUф имеет вид, определяемый выражением (1) и, следовательно, недостаток известного устройства [2] аналогичен недостатку устройства [1] и состоит в низкой помехоустойчивости.
Из известных технических решений наиболее близким к заявляемому устройству (прототипом) является устройство для восстановления несущей частоты, содержащее первый и второй фазовые детекторы, первый и второй интеграторы, петлевой фильтр, генератор, управляемый напряжением, фазовращатель и блок вычисления арктангенса, причем входы первого и второго фазовых детекторов объединены и являются входами устройства, выходы первого и второго фазовых детекторов соединены со входами соответственно первого и второго интеграторов, выход петлевого фильтра соединен со входом генератора, управляемого напряжением, выход которого соединен со вторым входом второго фазового детектора и входом фазовращателя, выход которого соединен со вторым входом первого фазового детектора (Прокис Дж. Цифровая связь. - М.: Радио и связь, 2000, стр. 296, рис.6.2.10) [3] - прототип.
Данное устройство было выбрано в качестве прототипа как совпадающее с заявляемым устройством по большинству существенных признаков.
Недостатком известного устройства является его низкая помехоустойчивость при восстановлении несущей частоты сигналов с комбинированной амплитудно-фазовой манипуляцией, обусловленная высокой дисперсией управляющего напряжения на входе ГУН, т.е. манипуляционным шумом в цепи управления ГУН, даже в случае отсутствия АБГШ.
Высокий уровень манипуляционного шума в управляющем напряжении на входе ГУН связан с тем, что в известном устройстве не предусмотрены операции над сигналом, позволяющие учесть имеющуюся (манипулируемую) амплитуду входного АФМ сигнала, связанную с конкретной информационной последовательностью {In}.
Действительно, как показано в [3, стр. 298, формула (6.2.42)], сигнал на входе петлевого фильтра в известном устройстве имеет вид

где А - амплитуда входного сигнала;
ϕ - текущая фаза;
ϕ 0 - оценка фазы;
nC и nS - шумовые процессы;
θ m- информационная (манипулируемая фаза), определяемая последовательностью символов {In}.
Поскольку для АФМ сигнала амплитуда является манипулируемой величиной (А=var) для последовательности информационных символов {In}, то, следовательно, уже первое слагаемое в выражении (3) является манипуляционным шумом даже при отсутствии входного АБГШ.
Таким образом, то, что в известном устройстве не учитывается принципиальное свойство АФМ сигнала, заключающееся в изменении его амплитуды, приводит к большому уровню манипулируемого шума в управляющем напряжении на входе ГУН и соответственно снижению помехоустойчивости.
Технический результат - повышение помехоустойчивости за счет снижения уровня манипуляционного шума в управляющем напряжении на входе ГУН - достигается выполнением следующих операций над сигналом:
- входной АФМ сигнал подвергают квадратурной корреляционной обработке при помощи опорного колебания с выхода ГУН и получают квадратурные сигналы;
- квадратурные сигналы, полученные при корреляционной обработке, подвергают аналого-цифровому преобразованию и получают цифровые синфазный и квадратурный отсчеты;
- по полученным цифровому синфазному и квадратурному отсчетам вычисляют первую оценку фазы как арктангенс отношения квадратурного и синфазного отсчетов;
- используя цифровые синфазный и квадратурный отсчеты как код адреса постоянного запоминающего устройства (ПЗУ), на его выходе получают вторую оценку фазы;
- по полученным цифровому синфазному и квадратурному отсчетам вычисляют амплитуду входного АФМ сигнала как корень квадратный из суммы квадратов цифровых синфазного и квадратурного отсчетов;
- вычитают из первой оценки фазы вторую оценку фазы, а результат вычитания умножают на амплитуду АФМ сигнала;
- сигнал, полученный в результате умножения на амплитуду АФМ сигнала, фильтруют в петлевом фильтре и подают как управляющее напряжение на вход ГУН;
- на выходе ГУН получают восстановленную несущую частоту входного АФМ сигнала.
Технический результат достигается тем, что устройство для восстановления несущей частоты сигналов с амплитудно-фазовой манипуляцией содержит первый и второй фазовые детекторы, первый и второй интеграторы, петлевой фильтр, генератор, управляемый напряжением, фазовращатель и блок вычисления арктангенса, причем первые входы первого и второго фазовых детекторов объединены и являются входом устройства, выходы первого и второго фазовых детекторов соединены со входами соответственно первого и второго интеграторов, выход петлевого фильтра соединен со входом генератора, управляемого напряжением, выход которого соединен со вторым входом второго фазового детектора и входом фазовращателя, выход которого соединен со вторым входом первого фазового детектора.
Согласно изобретению, в него введены первый и второй аналого-цифровые преобразователи, постоянное запоминающее устройство, первый и второй квадраторы, сумматор, блок вычисления квадратного корня, перемножитель и вычитатель, причем выходы первого и второго интеграторов соединены со входами соответственно первого и второго аналого-цифровых преобразователей, выход первого аналого-цифрового преобразователя соединен с первым входом блока вычисления арктангенса, первым входом постоянного запоминающего устройства и входом первого квадратора, выход второго аналого-цифрового преобразователя соединен со вторым входом блока вычисления арктангенса, вторым входом постоянного запоминающего устройства и входом второго квадратора, выход которого соединен со вторым входом сумматора, первый вход и выход которого соединены соответственно с выходом первого квадратора и входом блока вычисления квадратного корня, выход которого соединен со вторым входом перемножителя, выход и первый вход которого соединены соответственно со входом петлевого фильтра и выходом вычитателя, первый и второй входы которого соединены соответственно с выходом блока вычисления арктангенса и выходом постоянного запоминающего устройства.
Это позволяет выполнить новые операции над сигналом: при помощи аналого-цифрового преобразования квадратурных сигналов получить информацию об амплитуде входного АФМ сигнала и учитывать ее при выполнении основных операций над сигналами. В заявляемом устройстве амплитуда входного АФМ сигнала учитывается при определении второй (эталонной) оценки фазы в виде кода адреса ПЗУ и в виде множителя участвует в вычислении управляющего напряжения для ГУН. Как будет показано далее, такой учет принципиального свойства АФМ сигнала, связанного с имеющейся амплитудой, приводит к существенному снижению уровня манипуляционного шума на управляющем входе ГУН и, в итоге, приводит к повышению помехоустойчивости устройства.
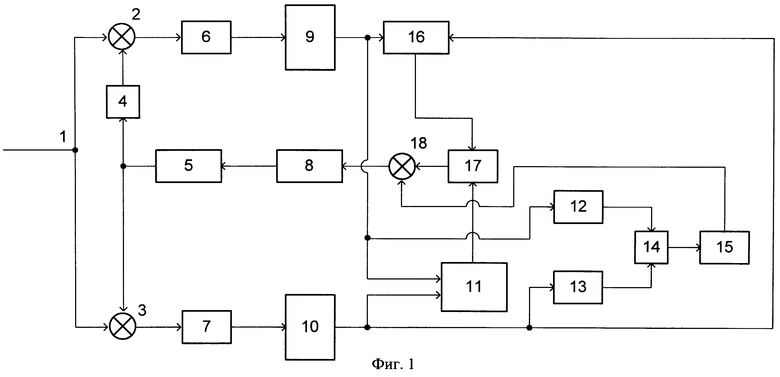
На фиг.1 приведена функциональная схема заявляемого устройства.
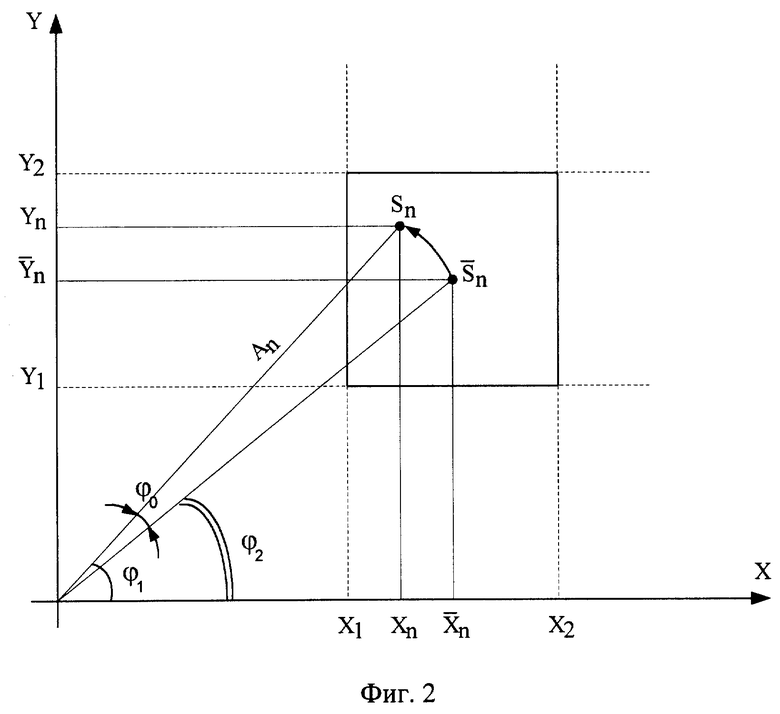
На фиг.2 приведен участок сигнальной плоскости АФМ сигнала. При этом на фиг.2 точка  соответствует нормативному положению АФМ сигнала на сигнальной плоскости, a
соответствует нормативному положению АФМ сигнала на сигнальной плоскости, a  - положению, занимаемому вследствие ненулевого фазового рассогласования по несущей частоте.
- положению, занимаемому вследствие ненулевого фазового рассогласования по несущей частоте.
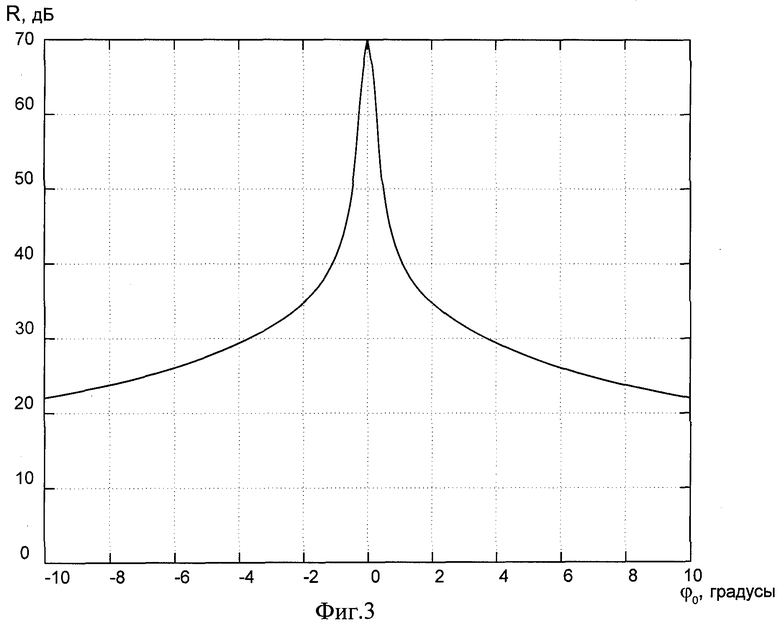
На фиг.3 показан график, показывающий выигрыш R отношения сигнал/манипуляционный шум заявляемого устройства в сравнении с прототипом.
Устройство для восстановления несущей частоты сигналов с амплитудно-фазовой манипуляцией (фиг.1) содержит вход 1 устройства, первый и второй ФД 2 и 3, фазовращатель 4, ГУН 5, первый и второй интеграторы 6 и 7, петлевой фильтр 8, первый и второй аналого-цифровые преобразователи (АЦП) 9 и 10, постоянное запоминающее устройство (ПЗУ) 11, первый и второй квадраторы 12 и 13, сумматор 14, блок 15 вычисления квадратного корня, блок 16 вычисления арктангенса, вычитатель 17 и перемножитель 18.
Первые входы первого и второго фазовых детекторов 2 и 3 объединены и являются входом 1 устройства, выходы первого и второго фазовых 2 и 3 детекторов соединены со входами соответственно первого и второго интеграторов 6 и 7, выход петлевого фильтра 8 соединен со входом генератора 5, управляемого напряжением, выход которого соединен со вторым входом второго фазового детектора 3 и входом фазовращателя 4, выход которого соединен со вторым входом первого фазового детектора 2.
Выходы первого и второго интеграторов 6 и 7 соединены со входами соответственно первого и второго аналого-цифровых преобразователей 9 и 10, выход первого аналого-цифрового преобразователя 9 соединен с первым входом блока 16 вычисления арктангенса, первым входом постоянного запоминающего устройства 11 и входом первого квадратора 12. Выход второго аналого-цифрового преобразователя 10 соединен со вторым входом блока 16 вычисления арктангенса, вторым входом постоянного запоминающего устройства 11 и входом второго квадратора 13, выход которого соединен со вторым входом сумматора 14, первый вход и выход которого соединены соответственно с выходом первого квадратора 12 и входом блока 15 вычисления квадратного корня, выход которого соединен со вторым входом перемножителя 18, выход и первый входы которого соединены соответственно со входом петлевого фильтра 8 и выходом вычитателя 17, первый и второй вход которого соединены соответственно с выходом блока 16 вычисления арктангенса и выходом постоянного запоминающего устройства 11.
Устройство работает следующим образом.
Входной АФМ сигнал имеет вид

где Аn и ϕ n - соответственно манипулируемые амплитуда и фаза, соответствующие информационному символу In из последовательности {In};
n(t) - АБГШ.
Поскольку заявляемое устройство, как будет показано далее, автоматически учитывает амплитуду Аn сигнала АФМ при своем функционировании, то рассмотрение работы устройства для М-позиционного сигнала АФМ можно провести на примере одной некоторой сигнальной точки (фиг.2).
Итак, пусть на вход устройства поступает сигнал АФМ, соответствующий модели (4).
Для простоты предположим, что входной АБГШ отсутствует, т.е. n(t)=0 в формуле (4), но сигнал несущей частоты, формируемый на выходе ГУН 5, имеет некоторое фазовое рассогласование ϕ 0 по отношению к входному АФМ сигналу (4). Таким образом, сигнал на выходе генератора 5 можно представить в виде

После квадратурной корреляционной обработки входного АФМ сигнала при помощи опорного колебания (5) в блоках 1-7 аналого-цифрового преобразования, на выходах первого АЦП 9 и второго АЦП 10 формируются синфазный и квадратурный цифровые отсчеты Хn и Yn, которые имеют смысл синфазной и квадратурной координат принимаемого АФМ сигнала на сигнальной плоскости (фиг.2), обозначенного на плоскости точкой Sn.
Блок 16 вычисления арктангенса формирует на своем выходе сигнал
где Y - сигнал на его первом входе;
Х - сигнал на его втором входе.
Таким образом, на выходе блока 16 формируется первая оценка фазы ϕ 1, соответствующая истинной угловой координате расположения точки Sn.
В свою очередь, поступающие на вход ПЗУ 11 цифровые отсчеты Хn и Yn имеют смысл кода адреса (являются адресом) информации, хранящейся в ПЗУ 11. В ПЗУ 11 в соответствии с видом принимаемого М-позиционного АФМ сигнала хранится информация о нормативном значении угловой координаты для каждой текущей сигнальной точки Sn.
ПЗУ 11 запрограммировано так, что на его выходе формируется ϕ 2 для любых значений Хn и Yn, удовлетворяющих условию
При этом 
где  и
и  - соответственно синфазная и квадратурная координаты центральной точки сигнальной области, определяемой выражением (7).
- соответственно синфазная и квадратурная координаты центральной точки сигнальной области, определяемой выражением (7).
В соответствии с логикой работы ПЗУ 11 формируемая на выходе ПЗУ 11 вторая оценка фазы ϕ 2 является нормативным значением, т.е. тем значением, которое устройство для восстановления несущей приписывает как нормативную угловую координату для всех сигнальных точек Sn, попадающих в зону (7). При этом автоматически учитываются величины проекций текущей сигнальной точки на координатные оси, т.е. амплитуда входного сигнала.
В соответствии с логикой работы вычитателя 17, на его выходе формируется сигнал

На выходе блока 15 формируется сигнал вида

имеющий смысл амплитуды входного сигнала. Таким образом, U15 естественным образом учитывает амплитуду АФМ сигнала.
С учетом выражений (9) и (10), на выходе перемножителя 18 формируется сигнал U18, поступающий на вход петлевого фильтра 8.

Выражение (11) легко преобразуется к виду

При фиксированном ϕ 0 математическое ожидание выражения (12) составляет

Uф=Aср·ϕ 0, (14)
где Аcp - средняя амплитуда АФМ сигнала.
Поскольку для каждого М-позиционного АФМ сигнала
Acp=const,
то из выражений (13) и (14) следует, что усреднение сигнала Uφ в петлевом фильтре дает напряжение, математическое ожидание которого пропорционально углу рассогласования ϕ 0, что позволяет управлять ГУНом для достижения ϕ 0→0° и когерентно восстанавливать несущую частоту.
При помощи ЭВМ проведены точные расчеты по формулам (3) и (11) для случая М=16 с перебором всех возможных значений манипулируемых величин ϕ n, Аn, а также различных значений угла фазового рассогласования ϕ 0.
Результаты данных расчетов приведены на фиг.3, где по оси абсцисс отложены значения угла ϕ 0, а по оси ординат - значение выигрыша R по отношению сигнал/манипуляционный шум заявляемого устройства в сравнении с прототипом. Значение R для каждого значения ϕ 0 определялось как

где mз - математическое ожидание величины Uφ для заявляемого устройства;
σ з - среднеквадратическое отклонение величины Uφ для заявляемого устройства;
mn - математическое ожидание величины Uφ для прототипа;
σ n - среднеквадратическое отклонение величины Uφ для прототипа.
Величины Uφ для заявляемого устройства и прототипа определялись по формулам соответственно (12) и (3).
Из графика видно, что заявляемое устройство имеет выигрыш в сравнении с прототипом при изменении ϕ 0 от - 10 до 10° в отношении сигнал/манипуляционный шум на входе ГУН от 20 до 70 дБ, что приводит к повышению помехоустойчивости всего устройства от 1 до 2 дБ.
Источники информации
1. Патент РФ №2019052, МПК (5) H 04 L 27/22, опубл. БИ №16, 1994 г.
2. Патент РФ №2019054, МПК 5 Н 04 L 27/34, опубл. БИ №16, 1994 г.
3. Прокис Дж. Цифровая связь. - М.: Радио и связь, 2000, стр. 296, рис.6.2.10 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ НЕСУЩЕЙ ЧАСТОТЫ СИГНАЛОВ С АМПЛИТУДНО-ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2004 |
|
RU2276838C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ НЕСТАБИЛЬНОСТИ НЕСУЩЕЙ ЧАСТОТЫ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2006 |
|
RU2336650C2 |
| СПОСОБ ПРИЕМА СИГНАЛА АМПЛИТУДНО-ФАЗОВОЙ МАНИПУЛЯЦИИ | 2002 |
|
RU2214691C1 |
| ДЕМОДУЛЯТОР ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2008 |
|
RU2393641C1 |
| УСТРОЙСТВО ВОССТАНОВЛЕНИЯ НЕСУЩЕЙ ЧАСТОТЫ ДЕМОДУЛЯТОРА СИГНАЛОВ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ ВЫСОКИХ ПОРЯДКОВ | 2018 |
|
RU2693272C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ КРАТКОВРЕМЕННЫХ СИГНАЛОВ С МНОГОУРОВНЕВОЙ АБСОЛЮТНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ В УСЛОВИЯХ ЗАМИРАНИЙ | 2018 |
|
RU2684605C1 |
| СИСТЕМА СВЯЗИ | 1986 |
|
SU1840155A1 |
| ЦИФРОВОЙ ДЕМОДУЛЯТОР СИГНАЛОВ С АМПЛИТУДНО-ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2022 |
|
RU2786159C1 |
| УСТРОЙСТВО ВОССТАНОВЛЕНИЯ НЕСУЩЕЙ ЧАСТОТЫ ДЕМОДУЛЯТОРА СИГНАЛОВ С ШЕСТНАДЦАТИПОЗИЦИОННОЙ АМПЛИТУДНО-ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2013 |
|
RU2550548C2 |
| ДЕМОДУЛЯТОР ДВУХПОЗИЦИОННЫХ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2018 |
|
RU2699066C1 |
Изобретение относится к радиотехнике. Технический результат заключается в повышении помехоустойчивости за счет снижения уровня манипуляционного шума в управляющем напряжении на входе генератора управляемого напряжением (ГУН). Сущность изобретения заключается в том, что входной сигнал амплитудно-фазовой манипуляции (АФМ) подвергают корреляционной обработке при помощи опорного колебания с выхода ГУН и получают квадратурные сигналы, которые подвергают аналого-цифровому преобразованию и получают цифровые синфазный и квадратурный отсчеты, по которым вычисляют первую оценку фазы как арктангенс отношения квадратурного и синфазного отсчетов и получают на выходе ГУН восстановленную несущую частоту входного АФМ сигнала. 3 ил.
Устройство для восстановления несущей частоты сигналов с амплитудно-фазовой манипуляцией, содержащее первый и второй фазовые детекторы, первый и второй интеграторы, петлевой фильтр, генератор, управляемый напряжением, фазовращатель и блок вычисления арктангенса, причем первые входы первого и второго фазовых детекторов объединены и являются входом устройства, выходы первого и второго фазовых детекторов соединены со входами, соответственно, первого и второго интеграторов, выход петлевого фильтра соединен со входом генератора, управляемого напряжением, выход которого соединен со вторым входом второго фазового детектора и входом фазовращателя, выход которого соединен со вторым входом первого фазового детектора, отличающееся тем, что в него введены первый и второй аналого-цифровые преобразователи, постоянное запоминающее устройство, первый и второй квадраторы, сумматор, блок вычисления квадратного корня, перемножитель и вычитатель, причем выходы первого и второго интеграторов соединены со входами, соответственно, первого и второго аналого-цифровых преобразователей, выход первого аналого-цифрого преобразователя соединен с первым входом блока вычисления арктангенса, первым входом постоянного запоминающего устройства и входом первого квадратора, выход второго аналого-цифрового преобразователя соединен со вторым входом блока вычисления арктангенса, вторым входом постоянного запоминающего устройства и входом второго квадратора, выход которого соединен со вторым входом сумматора, первый вход и выход которого соединены, соответственно, с выходом первого квадратора и входом блока вычисления квадратного корня, выход которого соединен со вторым входом перемножителя, выход и первый вход которого соединены, соответственно, с входом петлевого фильтра и выходом вычитателя, первый и второй вход которого соединены, соответственно, с выходом блока вычисления арктангенса и выходом постоянного запоминающего устройства.
| ПРОКИС Дж | |||
| Цифровая связь | |||
| - М.: Радио и связь, 2000, с | |||
| ДЖИНО-ПРЯДИЛЬНАЯ МАШИНА | 1920 |
|
SU296A1 |

