Изобретение относится к области машиностроения, в частности к автоматизации сборочных операций, и может быть использовано для автоматической сборки деталей типа "вал - втулка" с использованием роботов.
Известно устройство для ориентации и сборки деталей [1], принятое за прототип и содержащее корпус с приспособлением для создания вихревого потока газов и расположенный с зазором стержень с фланцем для ориентации одной из собираемых деталей. В известном устройстве [1] стержень совершает сложные движения во втулке, которые зависят от зазоров между стержнем и втулкой, давления газа, поступающего в зазор между втулкой и стержнем, массы стержня, размеров фланца, что усложняет процесс отладки данного устройства и создается вероятность внезапного прекращения процесса.
Необходимо, чтобы масса стержня с фланцем во много раз превышала массу ориентируемой детали. При применении данного устройства в руке робота возможно влияние ускорений руки на процесс движений стержня с фланцем во втулке. В известном устройстве [1] стержень совершает колебательные движения около точки, которая находится примерно на половине длины стержня, т.е. нижняя точка стержня совершает также колебательные движения, что при сборке высокоточных изделий не обеспечивает их соединения. Кроме того, для изменения величины колебаний необходимо заменять одну из деталей устройства. Таким образом, к недостаткам прототипа относятся: неточность взаимной ориентации собираемых деталей из-за колебаний нижнего торца стержня, замена стержня с фланцем для изменения процесса колебаний системы; повышенная масса стержня с фланцем для исключения влияния массы собираемой детали на характер колебаний стержня; невозможность использования устройства при движении руки робота с приспособлением из-за влияния сил инерции от движения руки на колеблющийся стержень, установленный в приспособлении с зазором.
Технический результат от использования изобретения заключается в расширении технологических возможностей, повышении точности ориентации собираемых деталей, возможности его использования при движении руки робота с приспособлением.
Указанный результат достигается тем, что в устройстве взаимной ориентации деталей при сборке, содержащем корпус с отверстиями, в котором установлено с зазором ориентирующее приспособление в виде стержня с фланцем, ориентирующее приспособление снабжено двумя втулками с наклонными отверстиями, установленными с возможностью вращения, при этом углы наклона осевых отверстий каждой втулки выбраны из условия пересечения осей отверстий корпуса и втулок в одной точке, расположенной на нижнем торце устройства, при этом на внешней поверхности одной втулки выполнены лопасти, а на внутренней нарезана резьба, по которой установлена другая втулка для регулирования угла наклона стержня, который установлен во втулке по посадке скольжения, корпус выполнен с возможностью подачи сжатого воздуха через его отверстия с созданием вращательного движения втулки с лопастями, а стержень выполнен с возможностью создания его колебаний, осуществляемых за счет вращения втулки с лопастями.
Устройство обеспечивает попадание детали точно в центр независимо от колебаний давления газа в системе, возможность регулирования колебаний тарелки без смены деталей устройства, отсутствие влияния ускорений руки робота на движение деталей устройства.
В известных науке и технике решениях заявителем не обнаружено совокупности отличительных признаков, таких как в заявленном техническом решении, проявляющих аналогичные свойства и позволяющих получить положительный эффект, указанный в поставленной цели.
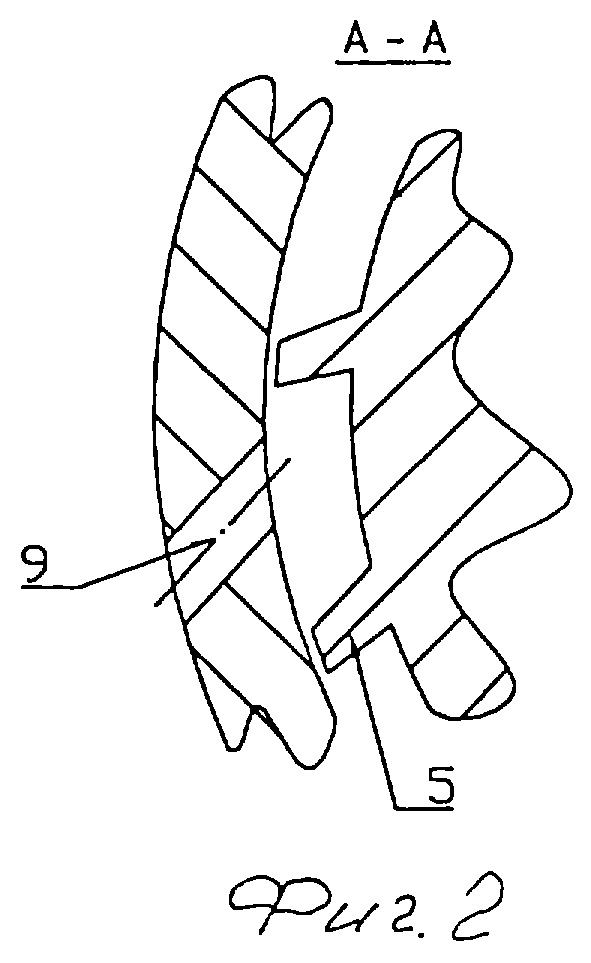
На фиг.1 показан общий вид устройства, а на фиг.2 сечение А-А.
Устройство состоит из корпуса 1, содержащего центральное отверстие, втулку 2, установленную на подшипниках 3, 4 в корпусе 1.
На втулке 2 на внешней поверхности расположены лопасти 5, а на внутренней поверхности нарезана резьба.
При этом отверстие с резьбой втулки 2 расположено под углом γ к оси наружной поверхности втулки 2. Ось ОО наружной поверхности втулки 2 и ось OO1 внутренней резьбовой поверхности пересекаются на нижнем торце втулки 2 в точке O. На резьбовой поверхности втулки 2 установлена резьбовая втулка 6, имеющая внутреннее отверстие, расположенное под углом α к резьбовой поверхности резьбовой втулки 6, причем пересечение оси OO2 внутренней поверхности отверстия резьбовой втулки 6 также происходит в т.O на торце резьбовой втулки 6. Втулка 6 контрится в детали 2 гайкой 7, установленной в выточке детали 2. Во втулке 6 установлен стержень 8 с фланцем с возможностью вращения во втулке 6. Установка стержня 8 во втулке 6 возможна как с подшипниками скольжения, так и с игольчатыми подшипниками качения. Стержень 8 имеет центральное отверстие для сборки деталей. В корпусе 1 имеются отверстия 9, расположенные по касательной к внутренней поверхности корпуса, по которым подается сжатый воздух.
Работает устройство следующим образом.
Базовая деталь для сборки устанавливается под центральным отверстием устройства при совмещении ее оси с осью OO устройства. В отверстия 9 корпуса 1 подается сжатый воздух, который через лопасти 5 создает вращательное движение втулке 2. При этом стержень 8 нижней торцевой поверхностью фланца 10 обкатывается по торцевой поверхности корпуса 1, т.е. совершает сложные колебательные движения. Собираемая деталь подается на верхнюю торцевую поверхность фланеца 10 и под воздействием колебательных движений стержня 8 перемещается к центральному отверстию стержня 8.
По центральному отверстию собираемая деталь перемещается в точку сборки O. Для регулирования амплитуды колебаний и угла поворота оси OO2 относительно оси OO необходимо открутить гайку 7 и повернуть втулку 6 на определенный угол по резьбе, а затем законтрить гайку 7.
Величину углов α и γ выбирают из условия α+γ≤tgf, где f - коэффициент трения при движении собираемой детали по верхней торцевой поверхности фланца 10 стержня 8.
Для того чтобы осуществлять изменение угла θ от нуля до максимального значения α+γ, необходимо принять α = γ.
Необходимо отметить, что в предлагаемом устройстве стержень 8 установлен по посадке скольжения в резьбовой втулке 6, что обеспечивает стабильность его движений при использовании устройства в руке робота. Кроме того, масса стержня не влияет на стабильность его движений и поэтому все устройство можно изготавливать из легких металлов.
Использование данного устройства обеспечивает попадание детали точно в центр, независимо от колебаний давления газа в системе, возможность регулирования колебаний тарелки без смены деталей устройства, отсутствие влияния ускорений руки робота на движение деталей устройства.
Источники информации
1. Авт. св. СССР 1537438 - МКИ В 23 Р 19/04 от 1998.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СБОРКИ КОМПЛЕКТА ДЕТАЛЕЙ | 2003 |
|
RU2245772C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ И СБОРКИ ДЕТАЛЕЙ В АВТОМАТИЗИРОВАННОМ ПРОИЗВОДСТВЕ | 2001 |
|
RU2204469C2 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ШЛИФОВАЛЬНОГО КРУГА | 1996 |
|
RU2094215C1 |
| Устройство для ориентирования и сборки деталей | 1991 |
|
SU1816623A1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2002 |
|
RU2228258C2 |
| СХВАТ РОБОТА | 1991 |
|
RU2022780C1 |
| Устройство для сборки комплекта деталей | 1982 |
|
SU1000212A2 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ДЕТАЛЕЙ | 1998 |
|
RU2130373C1 |
| СПОСОБ УСТАНОВКИ ДЕТАЛИ ПО ПЛОСКОСТИ И ОТВЕРСТИЯМ | 2000 |
|
RU2201322C2 |
| СПОСОБ ПОЛУЧЕНИЯ ТУГОГО РЕЗЬБОВОГО СОЕДИНЕНИЯ И КРЕПЕЖНАЯ ДЕТАЛЬ | 1998 |
|
RU2173416C2 |
Изобретение относится к области машиностроения, в частности к автоматизации сборочных операций, и может быть использовано для автоматической сборки деталей типа вал - втулка с использованием роботов. Устройство содержит корпус с отверстиями, в котором установлено с зазором ориентирующее приспособление в виде стержня с фланцем. Ориентирующее приспособление снабжено двумя втулками с наклонными отверстиями, установленными с возможностью вращения. При этом углы наклона осевых отверстий каждой втулки выбраны из условия пересечения осей отверстий корпуса и втулок в одной точке, расположенной на нижнем торце устройства. На внешней поверхности одной втулки выполнены лопасти, а на внутренней нарезана резьба, по которой установлена другая втулка для регулирования угла наклона стержня, который установлен во втулке по посадке скольжения. Корпус выполнен с возможностью подачи сжатого воздуха через его отверстия с созданием вращательного движения втулки с лопастями. А стержень выполнен с возможностью создания его колебаний, осуществляемых за счет вращения втулки с лопастями. Изобретение обеспечивает расширение технологических возможностей, повышение точности ориентации собираемых деталей, возможность его использования при движении руки робота с приспособлением. 2 ил.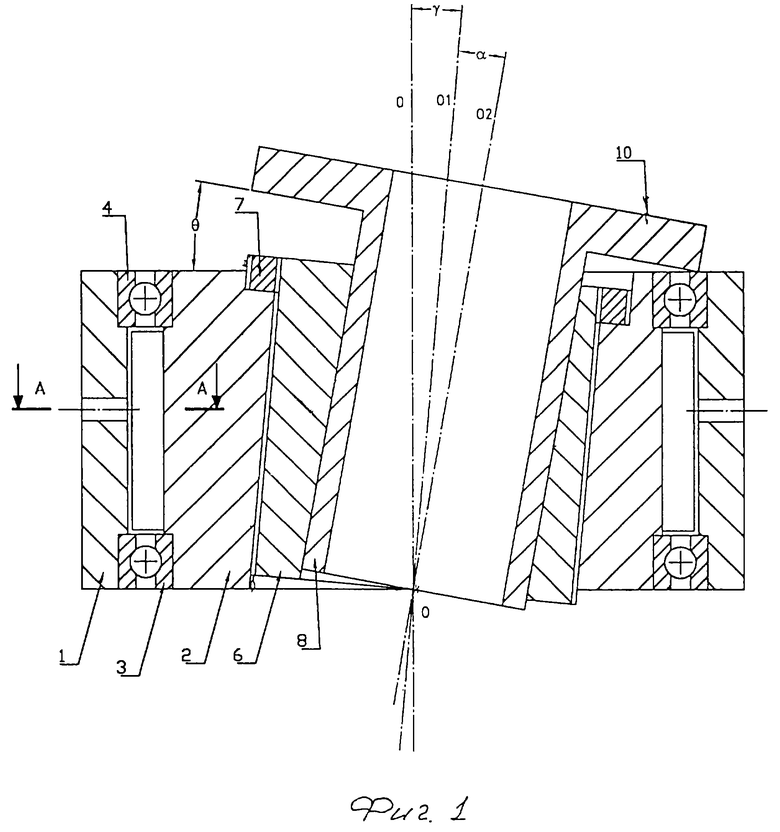
Устройство взаимной ориентации деталей при сборке, содержащее корпус с отверстиями, в котором установлено с зазором ориентирующее приспособление в виде стержня с фланцем, отличающееся тем, что ориентирующее приспособление снабжено двумя втулками с наклонными отверстиями, установленными с возможностью вращения, при этом углы наклона осевых отверстий каждой втулки выбраны из условия пересечения осей отверстий корпуса и втулок в одной точке, расположенной на нижнем торце устройства, при этом на внешней поверхности одной втулки выполнены лопасти, а на внутренней нарезана резьба, по которой установлена другая втулка для регулирования угла наклона стержня, который установлен во втулке по посадке скольжения, корпус выполнен с возможностью подачи сжатого воздуха через его отверстия с созданием вращательного движения втулки с лопастями, а стержень выполнен с возможностью создания его колебаний, осуществляемых за счет вращения втулки с лопастями.
| Устройство для сборки комплекта деталей | 1988 |
|
SU1537438A1 |
| RU 99117907 А, 20.06.2001 | |||
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ СБОРКИ ДЕТАЛЕЙ | 1995 |
|
RU2094202C1 |
| БЕТОННАЯ СМЕСЬ И СПОСОБ ЕЕ ПРИГОТОВЛЕНИЯ | 2006 |
|
RU2307810C1 |
| Прибор для промывания газов | 1922 |
|
SU20A1 |

