Изобретение относится к робототехнике и может быть использовано для сборки сложнофасонных соединений в различных областях машиностроения.
В конструкциях машин и механизмов имеются соединения со сложно-фасонным регулярным профилем, например зубчатые, шлицевые и т.п.
Известен способ сборки такого рода соединений, по которому одной из соединяемых деталей придается осевое возвратно-поступательное и периодическое вращательное движения на некоторый центральный угол.
Известные конструкции схватов роботов, в частности клинорычажные схваты, предназначены только для захвата и удержания объектов манипулирования. Недостаток их заключается в том, что для вышеуказанных соединений по приведенным способам сборки такими схватами требуется применение специальных промышленных роботов (ПР), имеющих ротацию кисти руки. Сложность конструкции ПР и программы его работы, высокая их стоимость и низкая точность углового поворота (ротация) кисти ограничивают применение ПР в сборке сложнофасонных соединений.
Цель изобретения - расширение технологических возможностей промышленных роботов, упрощение их программы работы и снижение стоимости сборочной операции. Это достигается тем, что предлагаемый схват робота, содержащий клинорычажный механизм, включающий корпус, губки захвата, силовой механизм линейного перемещения и два двуплечих рычага, шарнирно установленных в корпусе и несущих губки на одних концах, а другими взаимодействующие с конечным элементом силового механизма линейного перемещения, снабжен корпусом с прорезью, в котором установлен клинорычажный механизм, при этом корпус клинорычажного механизма снабжен крышкой со штоком и подпружинен в осевом направлении, на корпусе схвата установлен механизм вращения клинорычажного механизма, содержащий двигатель, предохранительную муфту и зубчатую передачу, взаимодействующую через шток с корпусом клинорычажного механизма, на цилиндрической части корпуса клинорычажного механизма по его окружности установлены с промежутками относительно друг друга фасонные кулачки разной длины, взаимодействующие поочередно профильными торцами с упором, укрепленным в прорези корпуса схвата и имеющим для взаимодействия с торцом корпуса клинорычажного механизма толщину, меньшую величины промежутка между соседними кулачками, на корпусе схвата установлен переключатель с возможностью взаимодействия посредством штока с корпусом клинорычажного механизма в момент нахождения рабочей части упора на уровне профильных торцов кулачков.
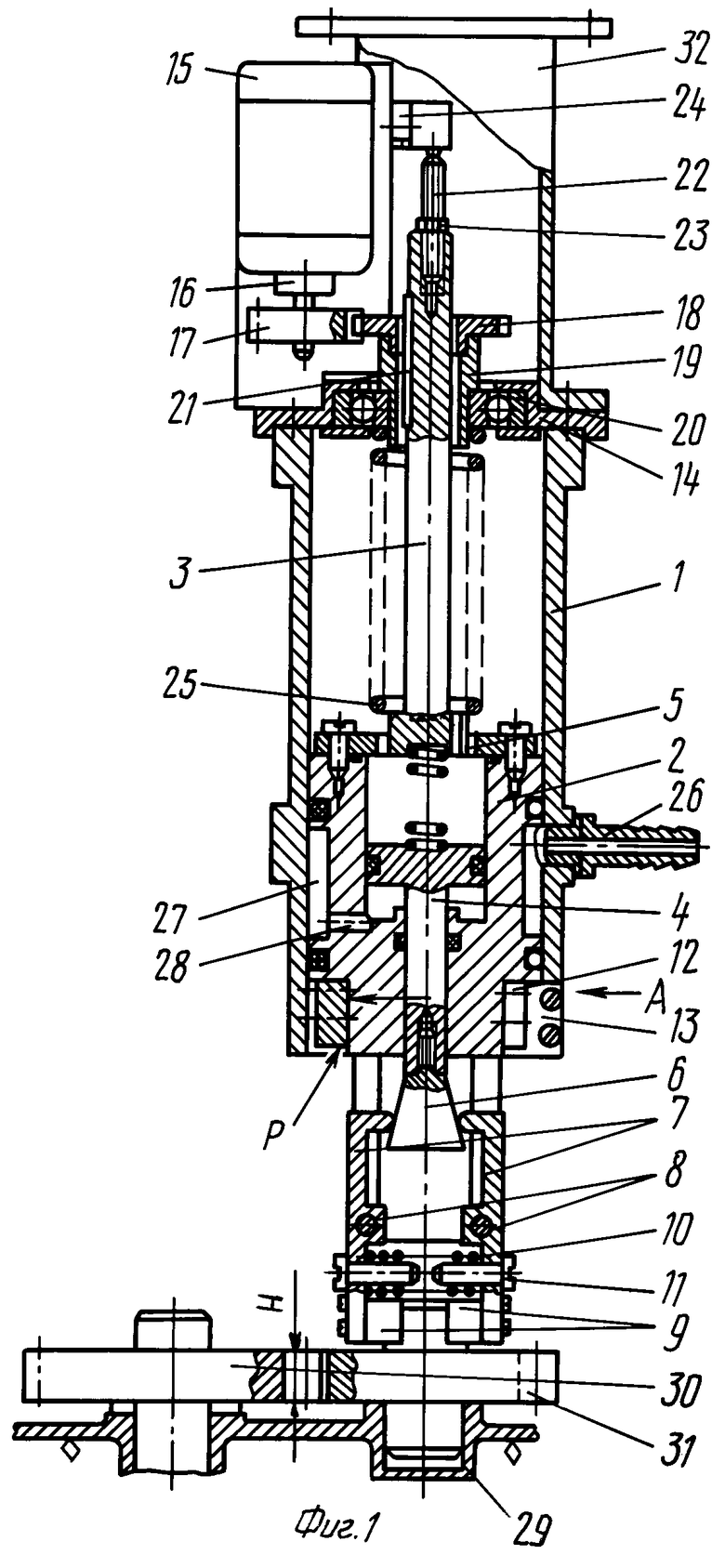
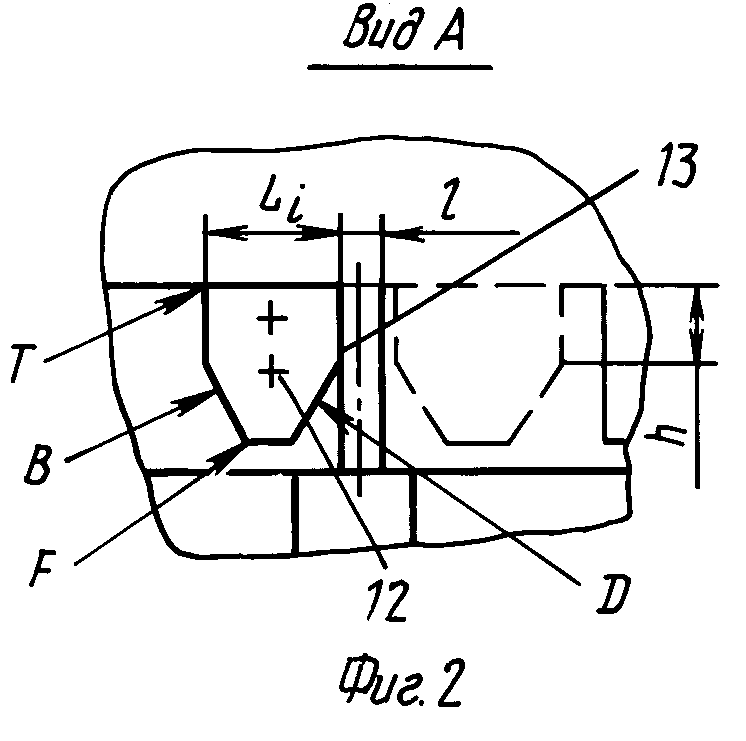
На фиг.1 изображен общий вид схвата в разрезе; на фиг.2 - вид А на фиг. 1.
Схват робота содержит корпус 1, в котором установлен с возможностью вращательного и возвратно-поступательного движения клинорычажный механизм, включающий корпус 2, крышку корпуса со штоком 3, силовой механизм линейного перемещения (поршень со штоком) 4, односторонне подпружиненный пружиной 5, конечный элемент 6 силового механизма линейного перемещения, два двуплечих рычага 7, установленных шарнирно на осях 8 в корпусе 2, губки захвата 9, закрепленные на одних концах двуплечих рычагов, пружину 10, разводящую губку 9, обеспечивающую постоянство контакта других концов двуплечих рычагов 7 с конечным элементом 6 силового механизма и установленную на осях (винтах) 11, которые укреплены в двуплечих рычагах 7.
На корпусе 2 клинорычажного механизма на его цилиндрической поверхности (канавке) Р радиуса R установлены по окружности с расстоянием по возможности равным l относительно друг друга и с упором в торец Т цилиндрической поверхности Р фасонные кулачки 12 переменной длины Li, имеющие профильные (рабочие) торцы (например, торцы, имеющие рабочие плоскости D, F и В). Каждый фасонный кулачок 12 может поочередно контактировать с установленным в прорези корпуса 1 схвата упором 13. Упор 13 может также контактировать с торцом Т корпуса 2 за счет того, что толщина упора 13 меньше промежутка l между фасонными кулачками 12. Высота нерабочей части Н кулачков 12 выбирается равной или меньшей высоты собираемого соединения. На крышке 14 корпуса 1 схвата установлен электродвигатель 15, на валу которого закреплена предохранительная (от перегрузки) муфта 16, и зубчатое колесо 17. Зубчатое колесо 17 зацеплено с шестерней 18, закрепленной на торце муфты 19, которая в свою очередь посредством подшипника 20 установлена с возможностью вращения в крышке 14 корпуса 1 схвата. Муфта 19 взаимодействует с возможностью относительного прямолинейного перемещения со штоком 3, что обеспечивается с помощью шпонки 21, установленной в пазах центрального отверстия муфты 19 и штока 3. В резьбовом отверстии в торце штока 3 установлен упор 22 и закреплен гайкой 23. Упор 22 взаимодействует с переключателем 24 электродвигателя 15, который также закреплен на крышке 14 корпуса схвата.
Клинорычажный механизм подпружинен в осевом направлении пружиной 25. Для подвода энергоносителя (сжатого воздуха) к силовому механизму линейного перемещения 4 в резьбовом отверстии корпуса схвата установлен штуцер 26, а на корпусе 2 клинорычажного механизма имеется кольцевая выточка 27, соединяемая с одной стороны с отверстием в штуцере 26, а с другой посредством отверстия 28 с полостью под поршнем силового механизма 4. На рисунке также показан собираемый узел, содержащий корпус 29, зубчатое колесо 30 и шестерню 31 (объект манипулирования). Крепление схвата к руке робота осуществляется с помощью фланцевой муфты 32, установленной на крышке 14 корпуса 1 схвата.
Высота нерабочей части h кулачков 12 выбирается равной и меньшей высоты собираемого соединения Н.
В исходном положении клинорычажный механизм находится в корпусе 1 схвата в крайнем нижнем положении, т.е. корпус 2 касается торцом Т рабочей поверхности упора 13, что обеспечивается пружиной 25, при этом электродвигатель 15 не работает.
Устройство работает следующим образом. Для захвата присоединяемой шестерни 31 рука робота вместе со схватом перемещается в зону, где установлены (например, в палетах) объекты манипулирования. Когда губки 9 схвата находятся на уровне поверхностей, за которые захватывается для транспортировки шестерня 31, рука робота останавливается; сжатый воздух подается через штуцер 26, кольцевую канавку 27 и отверстие 28 в полость корпуса 2, находящуюся под поршнем силового механизма 4, и перемещает его вместе со штоком и корпусом 6 вверх. При этом пружина 5 сжимается и рычаги 7, контактирующие одними концами с корпусом 6, поворачиваясь на осях 8 в корпусе 2, уменьшает расстояние между губками 9, закрепленными на других концах рычагов 7, и тем самым губки 9 захватывают объект манипулирования - шестерню 31 (за ось).
После транспортировки шестерни 31 на позицию сборки, на который уже установлен корпус 29 собираемого узла с сопрягаемым зубчатым колесом 30, рука робота позиционируется над зоной сборки и опускается вместе со схватом и шестерней 31 в зону сборки. При этом возможен случай (наиболее вероятный), когда торцы зубьев шестерни 31 упираются в торцы зубьев колеса 30, т.е. зубчатое соединение не осуществляется. Дальнейшее опускание руки робота приводит к тому, что клинорычажный механизм со штоком 3, упором 22, шпонкой 21 и шестерней 31 останавливаются, а корпус 1 схвата вместе с установленными на нем упором 13, крышкой 14, подшипником 20, электродвигателем 15, предохранительной муфтой 16, зубчатой передачей 17 и 18, муфтой 19 и переключателем 24 продолжают опускаться. Таким образом клинорычажный механизм вместе со штоком 3 и упором 22 перемещаются относительно корпуса 1 (и установленными на нем узлами) вверх. В момент, когда упор 13 выходит из промежутка между двумя кулачками 12 и его рабочая поверхность (торец) оказывается на уровне плоскости D кулачков 12 упором 22, воздействующим на переключатель 24, останавливается движение руки робота и одновременно включается электродвигатель 15. При этом вращение от вала электродвигателя через предохранительную муфту 16, зубчатую передачу 17 и 18, шпонку 21 и шток 3 передается клинорычажному механизму вместе с зажатой в его губках шестерней 31, т. е. клинорычажный механизм вместе с шестерней 31 поворачивается в корпусе 1 схвата. Вместе с корпусом 2 клинорычажного механизма поворачиваются в корпусе 2 и фасонные кулачки 12, которые поочередно своей наклонной плоскостью D набегают на рабочую поверхность упора 13 и тем самым приподнимают периодически клинорычажный механизм относительно неподвижного корпуса 1 схвата, т.е. происходит разрыв контакта торцов зубьев и периодический поворот шестерни 31 относительно зубчатого колеса 30 на некоторый центральный угол, пропорциональный отношению Li/R. Кулачки 12 на торцах, по которым скользит упор 13, имеют также плоскость F и наклонную плоскость В, обеспечивающие первая - поворот шестерни 31 на уровне подъема и вторая - плавное ее опускание для сопряжения с зубчатым колесом 30. Длина Li от кулачка к кулачку переменная и подбирается таким образом, чтобы в пределах одного оборота клинорычажного механизма при его осевом возвратно-поступательном движении обеспечить сборку зубчатого зацепления. В тот момент, когда наклонная плоскость В кулачка 12 скользит по рабочей поверхности упора 13, а клинорычажный механизм, плавно опускаясь, вводит в зацепление шестерню 31 с зубчатым колесом 30, происходит сборка зубчатой передачи. При этом клинорычажный механизм опускается до тех пор, пока упор 13, проходящий в промежуток между кулачками 12, не упрется в торец Т корпуса 2. Шток 3 вместе в упором 22 также опускается и выходит из контакта с переключателем 24, электродвигатель 15 выключается и одновременно включается оставшаяся часть программы по циклу работы робота: отклонение подачи сжатого воздуха, подъем и перемещение руки робота для возобновления цикла сборки новой зубчатой передачи.
При прекращении подачи сжатого воздуха в штуцер 26 в системе клинорычажного механизма сбрасывается давление воздуха (до атмосферного), пружина 5, воздействуя на поршень со штоком силового механизма 4 и конус 6, перемещает их вниз, подпружиненные с помощью сжатой пружины 10 рычаги 7 не имея препятствия (конуса 6), поворачиваются на осях 8 и тем самым увеличивается расстояние между губками 9 и освобождается от захвата объект манипулирования - шестерня 31. Для предохранения электродвигателя 15 от перегрузок служит муфта 16. Таким образом использование данного схвата робота за счет захвата объекта манипулирования, его периодического осевого возвратно-поступательного движения и периодического в пределах одного оборота поворота на некоторый центральный угол переменной величины обеспечивает сборку сложнофасонных соединений с регулярным профилем (например, зубчатых или шлицевых соединений).
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Схват робота | 1981 |
|
SU994256A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Схват робота | 1990 |
|
SU1773716A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват манипулятора | 1982 |
|
SU1076278A1 |
Изобретение относится к робототехнике и может быть использовано для сборки сложнофасонных соединений в различных областях машиностроения. Схват содержит клинорычажный механизм, включающий корпус, губки захвата, силовой механизм линейного перемещения и два двуплечих рычага, шарнирно установленных в корпусе и несущих на одних концах губки, а другими взаимодействующие с конечным элементом силового механизма линейного перемещения. Схват снабжен корпусом с прорезью, в котором установлен клинорычажный механизм, при этом корпус клинорычажного механизма имеет крышку со штоком и подпружинен в осевом направлении. На корпусе схвата установлен механизм вращения клинорычажного механизма, содержащий двигатель, предохранительную муфту и зубчатую передачу, взаимодействующую через шток с корпусом клинорычажного механизма, на цилиндрической части корпуса клинорычажного механизма по его окружности установлены с промежутками между собой фасонные кулачки разной длины, взаимодействующие поочередно с упором, укрепленным в прорези корпуса схвата и имеющим для взаимодействия с торцом корпуса клинорычажного механизма толщину, меньшую промежутку между кулачками. На корпусе схвата установлен переключатель с возможностью взаимодействия посредством штока с корпусом клинорычажного механизма в момент нахождения рабочей части упора на уровне профильных торцов кулачков. 2 ил.
СХВАТ РОБОТА, содержащий клинорычажный механизм, включающий корпус, привод, два двуплечих подпружиненных рычага, шарнирно установленных в корпусе и несущих губки на одних концах, а другими связанных с конечным элементом привода, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен полым цилиндрическим корпусом, на внутренней поверхности которого смонтирован упор, а корпус клинорычажного механизма коаксиально установлен в полом корпусе, подпружинен, имеет возможность осевого перемещения относительно него и снабжен приводом вращения, выполненным в виде смонтированного на полом корпусе электродвигателя, на валу которого смонтирована муфта, связанная посредством зубчатой передачи с дополнительно введенным штоком, на котором смонтирован корпус клинорычажного механизма, на наружной поверхности которого выполнена канавка, в которой установлены дополнительно введенные кулачки различной ширины с профильными боковыми поверхностями, имеющими возможность поочередного взаимодействия этими поверхностями с упором полого корпуса, при этом торцы кулачков и корпуса клинорычажного механизма совпадают.
| Костюк В.И | |||
| и др | |||
| Промышленные роботы в сборочном производстве | |||
| Киев, 1983, с.58. |
