Изобретение относится к области гидроавтоматики и может быть использовано в приводах исполнительных органов ракет и других летательных аппаратов.
Известен гидравлический цифро-аналоговый преобразователь (ЦАП), описанный в [1], включающий корпус, гильзу с радиальными подводящими отверстиями, в которой последовательно размещены плавающие поршни по числу разрядов двоичного кодового электрического сигнала на ЦАПе, попарно связанные между собой элементами зацепления, причем поршень младшего разряда, двоичного кодового электрического сигнала взаимодействует с распределительным золотником золотникового распределительного устройства гидравлического привода, гидравлически связанного с исполнительным механизмом, который через устройство обратной связи воздействует на плавающие поршни.
Недостатком указанной конструкции является недостаточное быстродействие и надежность из-за возможных перекосов поршней.
Наиболее близким к предложенному устройству - прототипом является ЦАП гидравлического привода, описанный в [2], содержащий корпус, шток обратной связи, гильзу с осевым отверстием и радиальными подводящими отверстиями, гидроусилители по числу разрядов двоичного кодового электрического сигнала на ЦАПе и плавающие поршни, попарно связанные между собой и снабженные отсечными поясками и элементами зацепления, включающими шток с Т-образным буртом и два сегментных паза, образующих с торцом поршня перемычку, причем в осевом отверстии гильзы установлен упор, а поршень младшего разряда кодового электрического сигнала взаимодействует с распределительным золотником золотникового распределительного устройства гидравлического привода, гидравлически связанного с исполнительным механизмом, который через устройство обратной связи воздействует на плавающие поршни.
Недостатком указанной конструкции является недостаточная чувствительность из-за возможного перекрытия проходного сечения радиальных подводящих отверстий при перемещении плавающих поршней, т.к. при регулировке максимальной скорости привода изменяется длина промежуточного толкателя, т.е. положение цепочки плавающих поршней.
Техническим результатом использования изобретения является повышение чувствительности за счет устранения перекрытия проходного сечения радиальных подводящих отверстий при любом перемещении плавающих поршней.
Технический результат достигается тем, что в ЦАПе гидравлического привода, содержащем корпус, шток обратной связи, гильзу с осевым отверстием и радиальными подводящими отверстиями, гидроусилители по числу разрядов двоичного кодового электрического сигнала на ЦАПе и плавающие поршни, попарно связанные между собой и снабженные отсечными поясками и элементами зацепления, включающими шток с Т-образным буртом и два сегментных паза, образующих с торцом поршня перемычку, причем в осевом отверстии гильзы установлен упор, охватывающий шток поршня младшего разряда кодового электрического сигнала, взаимодействующего с распределительным золотником гидравлического привода, в отличие от прототипа в нем в осевом отверстии гильзы выполнены коаксиальные канавки по числу гидроусилителей, размещенные в плоскости радиальных подводящих отверстий гильзы, связанные гидравлически с сегментными пазами плавающих поршней, при этом суммарное проходное сечение канавки в плоскости, проходящей через ось гильзы, не менее суммарного проходного сечения соответствующих радиальных отверстий, причем расстояние A от упора до торца канавки, наиболее удаленного от штока обратной связи, определяется соотношением:
c + d - K ≤ A ≤ d - k - x + Q + h2 - m,
где c - ширина отсечного пояска плавающего поршня;
d - ширина штока плавающего поршня, ближайшего к распределительному золотнику гидравлического привода:
k - ширина упора;
h2 - ширина штока плавающего поршня гидравлического привода;
m - ширина канавки;
x - ход распределительного золотника;
Q = l + Δ + b + c - s,
где l - расстояние от отсечного пояска до сегментного паза;
Δ - зазор между торцом сегментного паза и Т-образным буртом при упоре перемычки плавающего поршня в отсечной поясок соседнего плавающего поршня;
b - ширина Т-образного бурта;
s - ширина перемычки плавающего поршня,
а расстояние H от указанного торца до торцов остальных канавок, противолежащих штоку обратной связи, определяется соотношением:
где i - порядковый номер плавающего поршня, начиная со второю со стороны распределительного золотника гидравлического привода, или порядковый номер канавки, начиная со второй со стороны распределительного золотника гидравлического привода;
n - количество канавок, соответствующее числу гидроусилителей;
h - ширина штока плавающего поршня.
Выполнение канавок и определенная последовательность их размещения позволяет устранить перекрытие проходного сечения радиальных подводящих отверстий при любом перемещении плавающих поршней, а следовательно повысить чувствительность и быстродействие гидравлического привода.
На фиг. 1 представлена конструктивная схема размещения ЦАПа в составе гидравлического привода, на фиг. 2 представлен общий вид ЦАПа, на фиг. 3 представлено положение поршней младшего разряда кодового электрического сигнала при подаче на соответствующий гидроусилитель сигнала отрицательной полярности, на фиг. 4 представлено положение поршней младшего разряда кодового электрического сигнала при подаче на соответствующий гидроусилитель сигнала положительной полярности.
В состав гидравлического привода входит ЦАП 1, включающий гидроусилители 2 по числу разрядов двоичного кодового электрического сигнала на ЦАПе, плавающие поршни 3 с отсечными поясками 4. установленные в гильзе 5. Поршневая цепочка из поршней 3 через промежуточный толкатель 6 взаимодействует с распределительным золотником 7 золотникового распределительного устройства, гидравлически связанного с исполнительным механизмом 8, через устройство обратной связи 9 воздействующим на плавающие поршни 3. Поршни 3 связаны попарно между собой элементами зацепления, включающими шток 10 с Т-образным буртом 11, перемычку 12 и два сегментных паза 13. Упор 14 установлен в осевом отверстии 15 гильзы 5, гильза 5 снабжена радиальными отверстиями 16 и коаксиальными канавками 17, гидравлически связывающими гидроусилители 2 с сегментными пазами 12. Упор 14 охватывает шток плавающего поршня 18 младшего разряда кодового электрического сигнала, взаимодействующего с распределительным золотником 7, плавающий поршень старшего разряда кодового электрического сигнала взаимодействует со штоком 19 обратной связи.
При подаче на ЦАП 1 электрического сигнала положительной полярности в каждом разряде, т.е. на каждый гидроусилитель 2, создается давление нагнетания в пространстве между отсечными поясками 4 на каждой паре соседних плавающих поршней 3, которые раздвигаются внутри гильзы 5, при этом цепочка поршней 3 движется вверх, перемещая промежуточный толкатель 6 и сдвигая распределительный золотник 7. В золотниковом распределительном устройстве открываются щели, соединяющие магистрали слива и нагнетания с соответствующими цилиндрами исполнительного механизма 8, который через устройство обратной связи 9 перемещает цепочку поршней 3 вниз (в сторону закрытия щелей золотникового распределительного устройства) на величину смещения распределительного золотника 7. При подаче на ЦАП 1 электрического сигнала отрицательной полярности в каждом разряде, т. е. на каждый гидроусилитель 2, создается давление слива в пространстве между отсечными поясками 4 на каждой паре соседних плавающих поршней 3, которые сдвигаются внутри гильзы 5, при этом цепочка поршней 3 движется вниз, т.к. давление нагнетания поджимает распределительный золотник 7 через промежуточный толкатель 6 к цепочке плавающих поршней 3. В золотниковом распределительном устройстве открываются щели, соединяющие магистрали слива и нагнетания с соответствующими цилиндрами исполнительного механизма 8, который через устройство обратной связи 9 перемещает цепочку поршней 3 вверх (в сторону закрытия щелей золотникового распределительного устройства) на величину смещения распределительного золотника 7. Перемещение поршней 3 друг относительно друга ограничивается элементами зацепления, при раздвижении поршней бурт 11, выполненный на штоке 10, упирается в перемычку 12, образованную сегментными пазами 13 с торцом поршня, а при сжатии поршней перемычка 12 упирается в отсечной поясок 4 соседнего поршня. Упор 14, установленный в осевом отверстии 15 гильзы 5 ограничивает перемещение цепочки поршней 3 вниз. Радиальные подводящие отверстия 16 и канавки 17 обеспечивают подачу давления с гидроусилителей 2 в межпоясковое пространство поршней 3. Проходное сечение канавки 17 в плоскости, проходящей через ось гильзы 5, должно быть не менее проходного сечения радиальных отверстий 16, во избежание уменьшения скорости поступления жидкости и снижения быстродействия гидравлического привода, по этой же причине пояски 4 плавающих поршней 3 не должны перекрывать канавок 17 при крайних положениях цепочки плавающих поршней 3. При крайнем нижнем положении цепочки плавающий поршень 18 младшего разряда, который взаимодействует с распределительным золотником 7 гидравлического привода, опирается своим буртом в упор 14, при этом расстояние A от торца L канавки 17, наиболее удаленного от штока 19 обратной связи, до упора 14 должно быть из (фиг. 3) не менее c + d - k (5). При крайнем верхнем положении цепочки перемычка 12 поршня 17 не должна перекрывать другого торца N канавки 17, наиболее удаленной от штока 19 обратной связи. Крайнее верхнее положение поршня 17 обусловлено ходом распределительного золотника 7 до упора P, положение которого изменяется при регулировке максимальной скорости гидравлического привода (для данной конструкции ход распределительного золотника должен быть меньше d - k). Поэтому, чтобы при заданной ширине канавки перемычка 12 не перекрывала торец N канавки 17, наиболее удаленной от штока 19 обратной связи, при крайнем верхнем положении поршня 18, и не снижала скорость поступления жидкости, расстояние от упора 14 до торца L этой канавки из (фиг. 4) должно удовлетворять соотношению:
A ≤ d - k - x + c + l + Δ + b + h2 - s - m (6)
Учитывая, что l + Δ + b + c - s для всех плавающих поршней величина постоянная, обозначим ее за Q, подставляя значение Q в (6), получим:
A ≤ d - k - x + Q + h2 - m
Принимая во внимание (5), получим границы выполнения торца L канавки 17 относительно упора 14.
c + d - k ≤ A ≤ dd - k - x + Q + h2 - m
Т. к. ход в зацеплении каждой пары поршней определяется разностью размеров штока плавающего поршня и перемычки, то расстояние от торца L до торца R второй канавки, обращенного к распределительному золотнику, при наличии давления нагнетания в межпоясковом пространстве плавающих поршней, т.е. при упоре перемычки плавающего поршня, ближайшего к распределительному золотнику, в отсечной поясок соседнего плавающего поршня, определяется из (фиг. 3) соотношением:
H2 = -c + Q + h2 + h2 + c или H2 = 2h2 + Q
Аналогично определяется расстояние от торца L до торцов остальных канавок, противолежащих штоку обратной связи, при упоре перемычки каждого плавающего поршня в отсечной поясок соседнего плавающего поршня, это расстояние может быть описано формулой: .
.
Выполнение коаксиальных канавок определенного размера и формы и определенная последовательность их размещения позволяет устранить перекрытие проходного сечения радиальных подводящих отверстий при регулировке максимальной скорости гидравлического привода и при любом перемещении плавающих поршней, т.е. обеспечить постоянный расход рабочей жидкости через проходные сечения, а следовательно, обеспечить требуемую чувствительность и быстродействие гидравлического привода.
Литература
1. Патент RU N 1791625, кл. F 15 B 11/12, 9/02, 1990 г.
2. Авторское свидетельство SU N 1733722. кл. F 15 B 11/12, 1990 г.
Изобретение относится к гидроавтоматике и может быть использовано в приводах исполнительных органов ракет и других летательных аппаратов. Техническим результатом использования изобретения является повышение чувствительности за счет устранения перекрытия проходного сечения радиальных подводящих отверстий при любом перемещении плавающих поршней. Преобразователь содержит корпус, шток обратной связи, гильзу с осевым отверстием и радиальными подводящими отверстиями, гидроусилители по числу разрядов двоичного кодового электрического сигнала на преобразователе и плавающие поршни, попарно связанные между собой и снабженные отсечными поясками и элементами зацепления, включающими шток с Т-образным буртом и два сегментных паза, образующих с торцом поршня перемычку, причем в осевом отверстии гильзы установлен упор, охватывающий шток поршня младшего разряда кодового электрического сигнала, взаимодействующего с распределительным золотником гидравлического привода. В нем в осевом отверстии гильзы выполнены коаксиальные канавки по числу гидроусилителей, размещенные в плоскости радиальных подводящих отверстий гильзы, связанные гидравлически с сегментными пазами плавающих поршней, при этом суммарное проходное сечение канавки в плоскости, проходящей через ось гильзы, не менее суммарного проходного сечения соответствующих радиальных отверстий. Технический результат - повышение чувствительности и быстродействия гидравлического привода. 4 ил.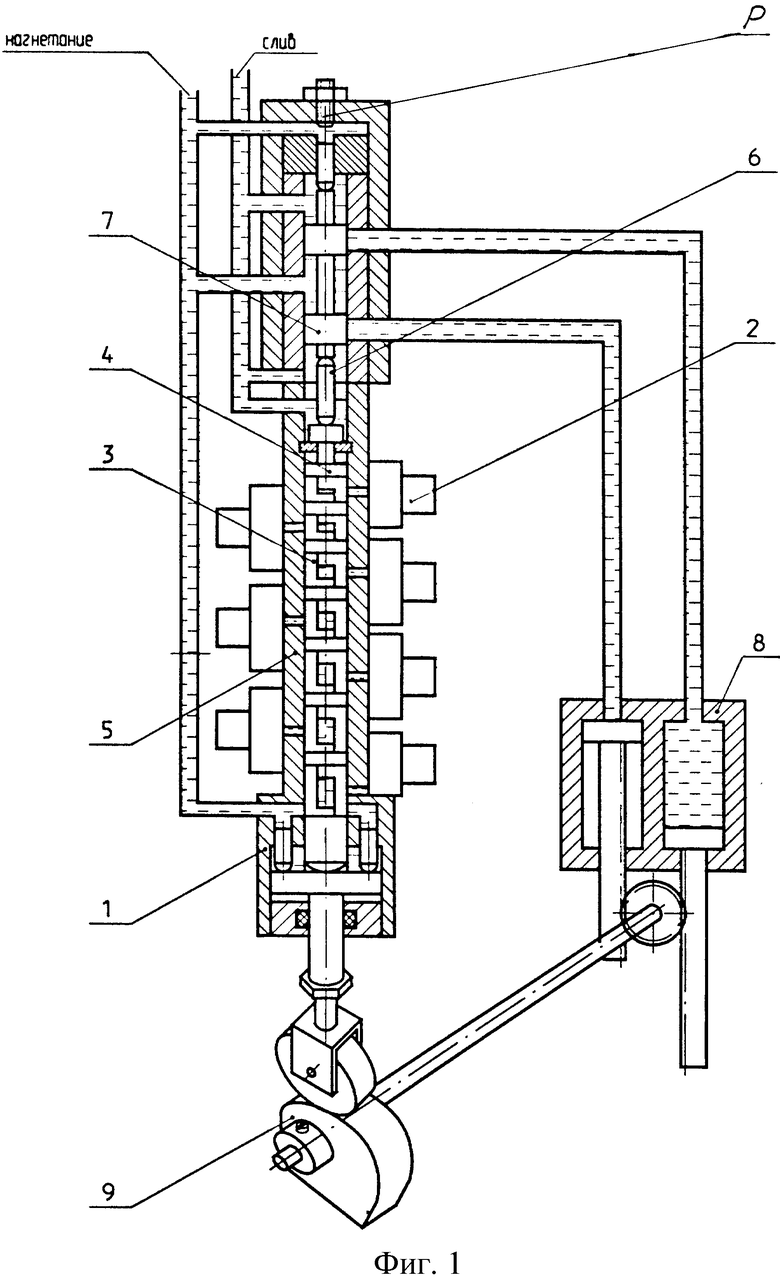
Цифроаналоговый преобразователь гидравлического привода, содержащий корпус, шток обратной связи, гильзу с осевым отверстием и радиальными подводящими отверстиями, гидроусилители по числу разрядов двоичного кодового электрического сигнала на цифроаналоговом преобразователе гидравлического привода и плавающие поршни, попарно связанные между собой и снабженные отсечными поясками и элементами зацепления, включающими шток с Т-образным буртом и два сегментных паза, образующих с торцом поршня перемычку, причем в осевом отверстии гильзы установлен упор, охватывающий шток поршня младшего разряда кодового электрического сигнала, взаимодействующего с распределительным золотником гидравлического привода, отличающийся тем, что в нем в осевом отверстии гильзы выполнены коаксиальные канавки по числу гидроусилителей, размещенные в полости радиальных подводящих отверстий гильзы, связанные гидравлически с сегментными пазами плавающих поршней, при этом суммарное проходное сечение канавки в полости, проходящей через ось гильзы, не менее суммарного проходного сечения соответствующих радиальных отверстий, причем расстояние А от упора до торца канавки, наиболее удаленного от штока обратной связи, определяется соотношением
с + d - k ≤ A ≤ d - k - x + Q + h2 - m,
где с - ширина отсечного пояска плавающего поршня;
d - ширина штока плавающего поршня, ближайшего к распределительному золотнику гидравлического привода;
k - ширина упора;
h2 - ширина штока плавающего поршня, второго со стороны распределительного золотника гидравлического привода;
m - ширина канавки;
x - ход распределительного золотника;
Q = l + Δ + b + c - s,
где l - расстояние от отсечного пояска до сегментного паза;
Δ - зазор между торцом сегментного паза и Т-образным буртом при упоре перемычки плавающего поршня в отсечной поясок соседнего плавающего поршня;
b - ширина Т-образного бурта;
s - ширина перемычки плавающего поршня,
а расстояние Н от указанного торца до торцев остальных канавок, противолежащих штоку обратной связи, определяется соотношением
где i - порядковый номер плавающего поршня, начиная со второго со стороны распределительного золотника гидравлического привода, или порядковый номер канавки, начиная со второй со стороны распределительного золотника гидравлического привода;
n - количество канавок, соответствующее числу гидроусилителей;
h - ширина штока плавающего поршня.
| Суммирующий цифровой механизм, преимущественно для позиционирования золотника | 1990 |
|
SU1733722A1 |
| Цифровой привод | 1990 |
|
SU1791625A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 1996 |
|
RU2103564C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 1992 |
|
RU2067226C1 |
| УСТРОЙСТВО ДЛЯ ПРОХОДКИ СКВАЖИНЫ БЕЗ ВЫЕМКИ ГРУНТА | 2020 |
|
RU2757612C2 |

