Изобретение относится к области строительства и может быть использовано при сооружении механизированных хранилищ крупногабаритных грузов, например паркингов для автомобилей.
Известен многоэтажный механизированный склад, содержащий грузовую платформу, оснащенную механизмом перемещения поддона ( авт.св. СССР № 1152891, кл. В 65 G 1/2, 1985 г. ). Механизм перемещения поддона имеет грузозахватный рычаг и привод для перемещения рычага поперек грузовой платформы. Для перемещения поддона грузовая платформа перемещается на уровень ячейки и грузозахватный рычаг перемещается по грузовой платформе под днище поддона пока его вертикальный выступ не окажется напротив паза поддона. Рычаг поворачивают, расфиксируя при этом поддон, после чего перемещают поддон на платформу. Недостатком этого технического решения является усложненная кинематика механизма перемещения поддона, наличие нескольких приводов или еще более сложной системы передачи.
Известна многоярусная механизированная автостоянка, содержащая механизм перемещения поддона с грузовой платформы в ячейку хранения и обратно, включающий размещенные с нижней стороны поддона на его торце буксирующие зацепы и установленный на подвижной платформе цепной конвейер с устройствами для захвата буксирующих зацепов (заявка ЕПВ №0376621, кл. Е 04 Н 6/22, 1994 г.). Автомобиль хранится в ячейке на поддоне, при этом шип фиксатора входит в паз поддона. При выгрузке грузовая платформа перемещается на уровень ячейки хранения, подвижную платформу перемещают по грузовой до тех пор, пока она не упрется в рычаг фиксатора, при этом конец цепного конвейера будет находиться под зацепом поддона. При включении цепного конвейера зуб входит в зацеп на поддоне и начинает перемещать поддон с автомобилем из ячейки на грузовую платформу. Недостатком данной системы является необходимость оснащения раздельными приводами цепного конвейера и подвижной платформы и согласование их работы, а наличие подвижной платформы увеличивает материалоемкость конструкции и стоимость автостоянки.
Наиболее близким по технической сущности к предлагаемому изобретению является устройство для горизонтального смещения поддона (патент РФ №2028442, кл. Е 04 Н 6/06), содержащее два рычажных захватных механизма с толкающими роликами, установленные по краям грузовой платформы, привод, связанный с захватными механизмами цепными передачами и муфты с рычагами захватного механизма. Для перемещения поддона с автомобилем из ячейки на грузовую платформу включают привод цепной передачи, при этом цепи увлекают за собой рычаги с роликами, которые при дальнейшем движении входят в карманы поддона и захватывают его. При последующем движении происходят смещение поддона до срабатывания конечных выключателей и остановка привода. Для перемещения поддона с грузовой площадки в ячейку привод включают в обратном направлении. Недостатком данного устройства является необходимость точной установки грузовой платформы относительно ячейки для обеспечения движения поддона по направляющим и зацепления поддона роликами через карманы. К тому же устройство предусматривает одностороннюю разгрузку, для работы при размещении ячеек с двух сторон от грузовой платформы вследствие несимметричности устройства потребуются сложные преобразования.
Цель изобретения - повышение надежности и расширение функционально-эксплуатационных характеристик.
Это достигается тем, что в механизме горизонтального перемещения поддона с грузовой платформы в ячейку хранения и обратно, содержащем привод, два редуктора и два рычажных механизма, установленных по краям грузовой платформы на ее продольной оси, основной рычаг каждого из рычажных механизмов установлен с помощью соединения, например шпоночного, на выходном валу червячного редуктора и снабжен звездочкой со стороны вала редуктора, установленной неподвижно относительно основного рычага, на свободном конце основного рычага установлен с возможностью вращения дополнительный равноплечий рычаг, который снабжен парой звездочек с вертикальной осью, установленных неподвижно относительно дополнительного рычага со стороны соединения с основным рычагом, на свободном конце дополнительного равноплечего рычага установлена с возможностью вращения опорная плита, которая снабжена звездочкой, установленной неподвижно относительно опорной плиты по ее оси вращения, и звездочка, установленная неподвижно на основном рычаге соединена цепной передачей с нижнерасположенной звездочкой из пары звездочек, установленных на дополнительном рычаге, а верхнерасположенная звездочка из пары звездочек, установленных на дополнительном рычаге, соединена цепной передачей со звездочкой, установленной неподвижно на опорной плите, при этом привод соединен с червячными редукторами валами с крутильной жесткостью для обеспечения синхронизации поворота пар рычагов в противоположных направлениях и поступательного движения опорных плит в одном направлении, а опорные плиты рычажных механизмов установлены с возможностью взаимодействия с посадочными местами поддонов для установки автомобилей. Привод механизма горизонтального перемещения снабжен реверсивным двигателем для обеспечения перемещения опорных плит в двух взаимно противоположных направлениях. Для обеспечения прямолинейного движения опорных плит звездочки выполнены с диаметрами делительных окружностей, выбранными из условий равенства угловой скорости вращения дополнительного равноплечего рычага удвоенной угловой скорости вращения основного рычага и угловой скорости вращения опорной плиты угловой скорости вращения основного рычага.
Существенное отличие заявленного механизма горизонтального перемещения заключается в том, что выполнение каждого из двух рычажных механизмов на базе двух равноплечих рычагов с установленной на одном из них дополнительном рычаге опорной плиты, которые приводятся во вращение с различными скоростями от одного привода с обеспечением прямолинейного поступательного перемещения опорной плиты, позволяет решить задачу перемещения поддона с автомобилем в ячейку хранения, используя простой по кинематике механизм из проверенных стандартных элементов. При этом такой механизм не требует высокой точности останова грузовой платформы, т.к. нет элементов, требующих таковую для стыковки (направляющих, упоров и т.п.), позволяет обслуживать все оппозитно расположенные ячейки без каких-либо настроек и регулировок, имеет простую схему управления движением от одного конечного положения на грузовой платформе до другого, раскрытого в ячейке.
Заявителю не известен механизм горизонтального перемещения поддона с автомобилем в ячейку для хранения с указанной совокупностью существенных признаков и заявленная совокупность существенных признаков не вытекает явным образом из современного уровня техники, что подтверждает соответствие заявляемого изобретения критериям “новизна” и “изобретательский уровень”.
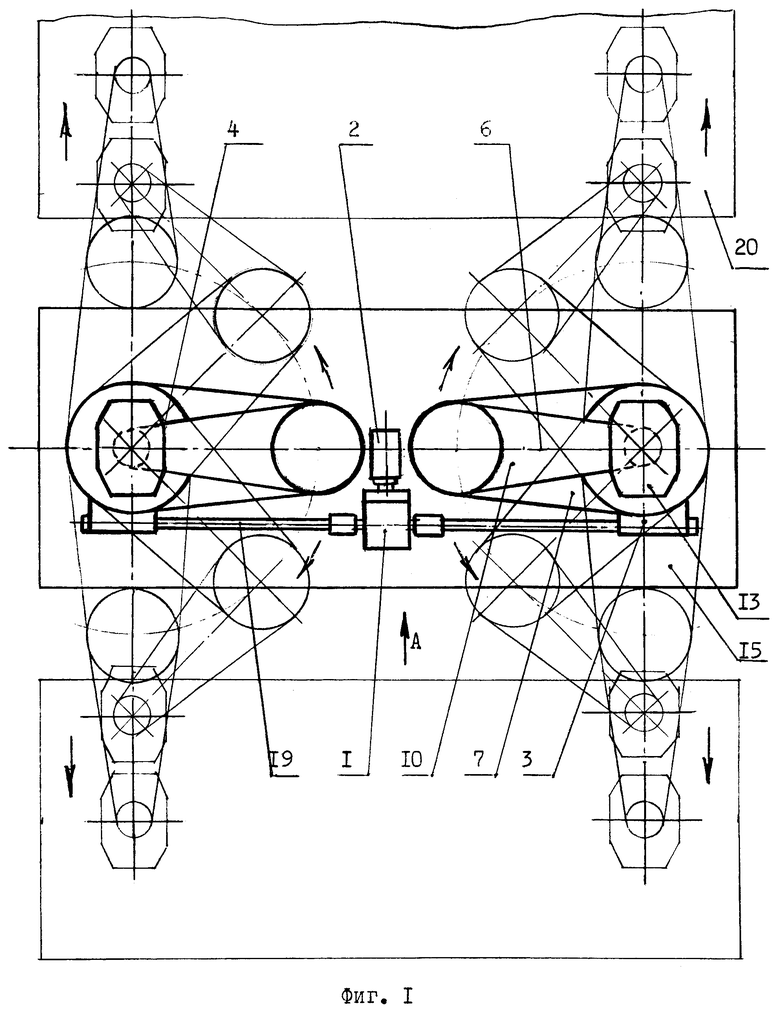
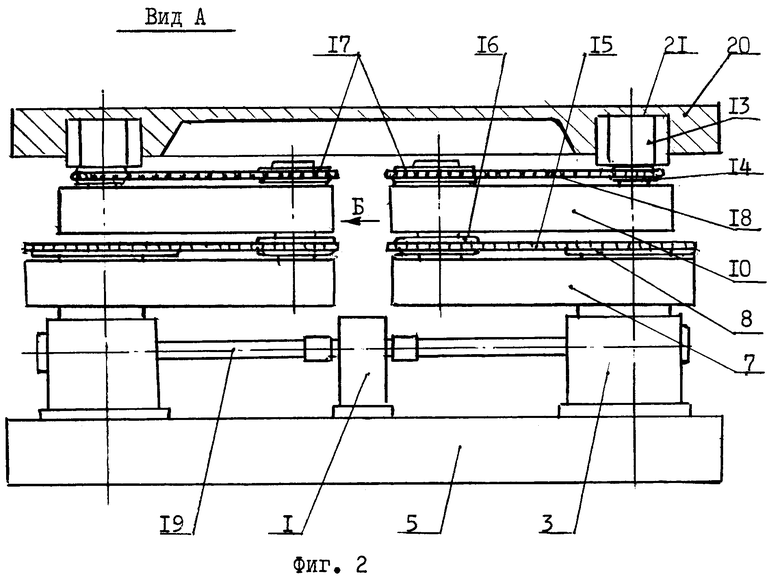
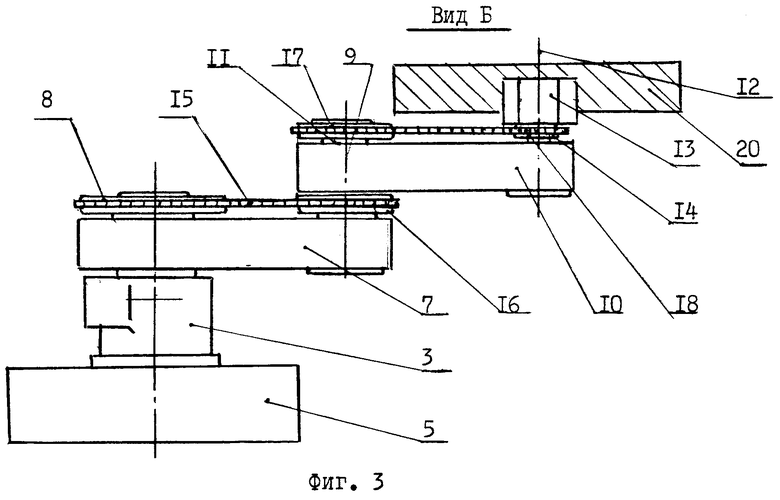
Предлагаемое изобретение поясняется чертежами, где на фиг.1 представлен вид в плане механизма с обозначением промежуточного и крайнего положений; на фиг. 2 - вид А (см. фиг.1); на фиг.3 - вид Б для развернутого крайнего положения.
Механизм горизонтального перемещения поддона с грузовой платформы в ячейку хранения и обратно состоит из привода 1, выполненного на базе реверсивного двигателя 2, двух червячных редукторов 3 и двух рычажных механизмов 4, установленных по краям грузовой платформы 5 на ее продольной оси 6.
Каждый из рычажных механизмов 4 содержит основной рычаг 7, установленный на выходном валу редуктора 3 и снабженный неподвижно соединенной с ним звездочкой 8. На другом свободном конце основного рычага 7 установлен с возможностью вращения вокруг оси 9 дополнительный равноплечий рычаг 10, который снабжен неподвижно установленной относительно него парой звездочек 11 с вертикальной осью 9. На другом свободном конце дополнительного рычага 10 установлена с возможностью вращения вокруг оси 12 опорная плита 13, которая снабжена неподвижно установленной относительно нее звездочкой 14. Звездочка 8 основного рычага 7 соединена цепной передачей 15 с нижнерасположенной звездочкой 16 пары звездочек 11, а верхнерасположенная звездочка 17 пары звездочек 11 соединена цепной передачей 18 со звездочкой 14 опорной плиты 13.
Привод 1 соединен с червячными редукторами 3 валами 19. Опорные плиты 13 взаимодействуют с поддонами 20 посредством посадочных мест 21.
Механизм горизонтального перемещения поддона с грузовой платформы в ячейку хранения и обратно работает следующим образом. Команда на включение и выключение механизма горизонтального перемещения подается оператором с пульта управления или поступает с управляющей ЭВМ в случае автоматизированного паркинга. Исходное состояние может быть одним из следующих: механизм без поддона в свернутом или раскрытом положении; механизм с установленным на опорную плиту с помощью специальных ловителей поддоном, перемещающихся в этом случае как единое целое, в свернутом или раскрытом положении; механизм с установленным поддоном, на котором закреплен автомобиль, в свернутом или раскрытом положении. Все элементы механизма рассчитаны из условий работы последнего, наиболее нагруженного случая. При включении механизма вращение от двигателя 2 привода 1 передается посредством валов 19 червячным редукторам 3, на выходном валу которых посредством шпоночного соединения установлен основной рычаг 7 со звездочкой 8. Вращаясь основной рычаг 7 от звездочки 8 посредством цепной передачи 15 вращает пару звездочек 11 и соответственно неподвижно соединенный с ней дополнительный рычаг 10 через нижнерасположенную звездочку 16 вокруг оси 9. От верхнерасположенной звездочки 17 посредством цепной передачи 18 вращение передается опорной плите 13 через неподвижно соединенную с ней звездочку 14. 3вездочка 8, установленная неподвижно относительно основного рычага 7, и нижнерасположенная звездочка 16 из пары звездочек 11, установленных на дополнительном рычаге 10, выполнены с диаметрами делительных окружностей, выбранными из условия равенства угловой скорости вращения дополнительного равноплечего рычага 10 удвоенной угловой скорости вращения основного рычага 7, а верхнерасположенная звездочка 17 из пары звездочек 11, установленных на дополнительном рычаге 10, и звездочка 14, установленная неподвижно относительно опорной плиты 13 по ее оси вращения, выполнены с диаметрами делительных окружностей, выбранными из условия равенства угловой скорости вращения опорной плиты 13 угловой скорости вращения основного рычага 7, при этом опорная плита 13 будет отслеживать каждое движение основного рычага 7 и дополнительного рычага 10, оставаясь плоскопараллельной относительно ячейки хранения, что обеспечивает прямолинейное поступательное движение обеих опорных плит относительно грузовой платформы в одном направлении, а при реверсе двигателя 2 - в обратном направлении. На опорные плиты 13 посредством посадочных мест 21 может быть установлен поддон 20, на котором может быть закреплен автомобиль. Схема работы механизма не изменяется при обслуживании противоположной ячейки, кроме установки соответствующего направления вращения двигателя 2 привода 1.
Использование изобретения позволит повысить надежность механизма горизонтального перемещения поддона с автомобилем в ячейку хранения и обратно за счет простоты и использования освоенных стандартных элементов кинематики, несложной схемы управления, а также расширить функциональные и эксплуатационные возможности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для установки в боксы автомобилей в многоэтажных автоматизированных гаражах | 1990 |
|
SU1825866A1 |
| УСТРОЙСТВО ДЛЯ ГОРИЗОНТАЛЬНОГО СМЕЩЕНИЯ ПОДДОНА | 1991 |
|
RU2028442C1 |
| АВТОМАТИЗИРОВАННЫЙ МНОГОЭТАЖНЫЙ ГАРАЖ-СКЛАД | 2006 |
|
RU2360086C2 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
| СПОСОБ ЗАГРУЗКИ И ВЫГРУЗКИ АВТОМОБИЛЯ В МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКЕ С ОППОЗИТНЫМ РАСПОЛОЖЕНИЕМ ЯЧЕЕК ХРАНЕНИЯ ОТНОСИТЕЛЬНО ШАХТЫ ПОДЪЕМНИКА И АВТОСТОЯНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2120528C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ | 2011 |
|
RU2452676C1 |
| МНОГОЭТАЖНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 2002 |
|
RU2238381C2 |
| МНОГОЯРУСНАЯ АВТОМАТИЗИРОВАННАЯ АВТОСТОЯНКА МОДУЛЬНОГО ТИПА | 2008 |
|
RU2376430C1 |
| ПРИВОД ШТАНГОВОГО ГЛУБИННОГО НАСОСА | 1999 |
|
RU2160852C1 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
Изобретение относится к области строительства и может быть использовано при сооружении механизированных хранилищ крупногабаритных грузов, например паркингов для автомобилей. Техническим результатом является повышение надежности механизма горизонтального перемещения поддона с автомобилем в ячейку хранения и обратно за счет простоты и использования освоенных стандартных элементов кинематики, несложной схемы управления, а также расширение функциональных и эксплуатационных возможностей. Он достигается тем, что в механизме горизонтального перемещения поддона с грузовой платформы в ячейку хранения и обратно, содержащем привод, два редуктора и два рычажных механизма, установленных по краям грузовой платформы на ее продольной оси, в котором основной рычаг каждого из рычажных механизмов установлен с помощью соединения, например шпоночного, на выходном валу редуктора, например червячного, и снабжен звездочкой со стороны вала редуктора, установленной неподвижно относительно основного рычага, на свободном конце основного рычага установлен с возможностью вращения дополнительный равноплечий рычаг, который снабжен парой звездочек с вертикальной осью, установленных неподвижно относительно дополнительного рычага со стороны соединения с основным рычагом, на свободном конце дополнительного равноплечего рычага установлена с возможностью вращения опорная плита, которая снабжена звездочкой, установленной неподвижно относительно опорной плиты по ее оси вращения, и звездочка, установленная неподвижно на основном рычаге, соединена цепной передачей с нижнерасположенной звездочкой из пары звездочек, установленных на дополнительном рычаге, а верхнерасположенная звездочка из пары звездочек, установленных на дополнительном рычаге, соединена цепной передачей со звездочкой, установленной неподвижно на опорной плите. При этом привод соединен с редукторами, например, валами с крутильной жесткостью, обеспечивающей синхронизацию поворота пар рычагов в противоположных направлениях и поступательное движение опорных плит в одном направлении. Опорные плиты рычажных механизмов установлены с возможностью взаимодействия с посадочными местами поддонов для установки автомобилей. 2 з.п. ф-лы, 3 ил.
| УСТРОЙСТВО ДЛЯ ГОРИЗОНТАЛЬНОГО СМЕЩЕНИЯ ПОДДОНА | 1991 |
|
RU2028442C1 |
| Способ экспресс-оценки удароопасности горных пород | 1985 |
|
SU1344914A1 |
| Держатель инструмента | 1982 |
|
SU1102661A1 |

