Изобретение относится к устройствам для горизонтального смещения поддона, применяемым в многоэтажных автоматизированных гаражах или складах для установки автомобиля или груза на поддоне в индивидуальный бокс и извлечения их оттуда.
Проведение этой сложной операции наиболее целесообразно осуществлять с помощью устройств, установленных непосредственно на грузовой платформе, транспортирующей поддон с автомобилем или грузом к месту хранения и обратно.
Известно устройство для горизонтального смещения поддона [1], содержащее две раздвижные двухъярусные толкающие балки с захватами поддона, установленные по краям платформы, привод балок и приводы захватов. Привод балок установлен внутри платформы под балками и связан с ними зубчато-реечными и цепными передачами. Приводы захватов установлены на верхних ярусах толкающих балок. Толкающие балки установлены на роликах в направлении, поперечном продольной оси грузовой платформы.
Для установки поддона с автомобилем или грузом в индивидуальный блок с грузовой платформы, находящейся на уровне соответствующего бокса, включают приводы захватов и толкающих балок. Захваты удерживают поддон, а толкающие двухъярусные балки, перемещаясь поперек грузовой площадки и одна относительно другой, сдвигают поддон в бокс, совершая рабочий ход. После установки поддона в боксе захваты освобождают поддон, а толкающие балки возвращаются на грузовую платформу, совершая холостой ход. Для перемещения поддона из бокса на грузовую платформу операцию осуществляют в обратном порядке. Толкающие балки холостым ходом входят в бокс, захватывают поддон и перемещают его назад на грузовую платформу.
Устройство имеет большой вес из-за наличия двухъярусных толкающих балок с направляющими роликами, а также большую высоту. Наличие холостых ходов толкающих балок при перемещении поддона с грузовой площадки в бокс и перемещении его из бокса на грузовую площадку увеличивает цикл работы устройства.
Известно также устройство для горизонтального смещения поддона [2], которое содержит два рычажных захватных механизма, установленных по краям грузовой платформы, и привод, связанный цепными передачами с захватными механизмами. Каждый захватный механизм выполнен в виде двуплечего рычага с толкающими роликами на концах, расположенного в горизонтальной плоскости. Рычаги установлены своими средними частями на вертикальных осях вращения, закрепленных на кулисах. Кулисы расположены в горизонтальной плоскости. Они установлены на вертикальных осях вращения, закрепленных на грузовой платформе на ее продольной оси.
В исходном состоянии кулисы расположены вдоль продольной оси грузовой платформы, а рычаги - поперек нее. При включении привода кулисы совершают возвратно-поступательные перемещения поперек платформы, а рычаги вращаются на кулисах. За один цикл работы устройства отклоняются от продольной оси к краю платформы, а затем возвращаются назад. Рычаги за это время совершают поворот на 180о.
Для перемещения поддона из бокса на грузовую платформу включается привод устройства. В результате отклонения кулис от продольной оси платформы и поворота рычагов на 90о толкающие ролики входят в боковые карманы поддона, размещенного в боксе на направляющих роликах. При последующем возвращении кулис к продольной оси и повороте рычагов еще на 90о толкающие ролики, перемещаясь в карманах, смещают поддон из бокса на грузовую платформу.
Для перемещения поддона с грузовой платформы в бокс включается привод устройства. Толкающие ролики входят в карманы поддона. В результате отклонения кулис и поворота рычагов толкающие ролики перемещают поддон с грузовой платформы в бокс. При последующем повороте рычагов и возвращении кулис к продольной оси грузовой платформы толкающие ролики выходят из карманов поддона и устройство возвращается в исходное положение.
Данное устройство имеет меньшую массу и малую высоту по сравнению с рассмотренным выше устройством. Оно одним движением захватывает и перемещает поддон, что исключает наличие холостого хода. Это уменьшает цикл перемещения поддона. Однако данное устройство имеет сложную кинематику из-за наличия кулис, вращающихся рычагов и отдельных цепных передач для перемещения кулис и вращения рычагов. Вращающиеся на кулисах рычаги задают захватывающим роликам почти круговую рабочую траекторию движения. Это приводит к большим по протяженности перемещениям толкающих роликов в карманах поддона, что вызывает их повышенный износ и снижение надежности и долговечности устройства в целом.
В основу изобретения положена задача разработать устройство для горизонтального смещения поддона, в котором захватный механизм и его связь с приводом выполнены таким образом, чтобы траектория рабочего хода толкающих роликов была близкой к прямолинейной и тем самым упростилась конструкция устройства, повысилась его надежность и долговечность.
Эта задача решается тем, что в устройстве для горизонтального смещения поддона, содержащем два рычажных захватных механизма с толкающими роликами, установленные по краям грузовой платформы, и привод, связанный с захватными механизмами цепными передачами, каждый рычажный захватный механизм выполнен в виде рычага, подвижно размещенного в муфте, свободно установленной на грузовой платформе на вертикальной оси вращения, и шарнирно связанного с приводной цепью, которая имеет криволинейный захватный участок и прямолинейный рабочий участок, расположенный параллельно направлению смещения поддона.
Такое решение просто по кинематике. Толкающие ролики рычагов, шарнирно связанных с приводными цепями, движутся по траектории, повторяющей трассу движения цепей. Она имеет короткие криволинейные захватные участки, расположенные параллельно направлению смещения поддона. Вследствие этого толкающие ролики имеют малые по протяженности перемещения в карманах поддонов при их смещении, что существенно снижает их износ и повышает надежность и долговечность устройства.
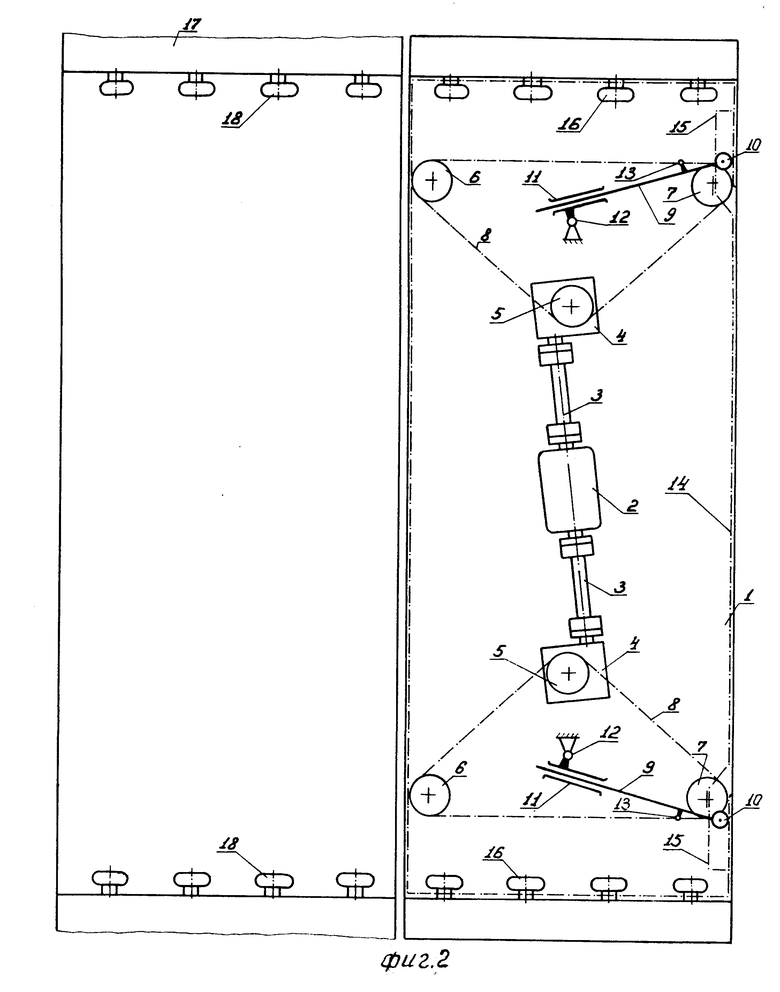
На фиг. 1 схематично изображено предлагаемое устройство при нахождении поддона в боксе, вид сверху; на фиг.2 - то же, при нахождении поддона на грузовой платформе.
На грузовой платформе 1 установлен двигатель 2, который через промежуточные валы 3 связан с редукторами 4, на выходных валах которых закреплены ведущие звездочки 5. Вблизи одной продольной стороны грузовой платформы 1 установлены ведомые звездочки 6, а вблизи противоположной стороны - ведомые звездочки 7. Ведомые звездочки 6 и 7 расположены на линиях, перпендикулярных продольным сторонам грузовой платформы 1, т.е. параллельно направлению смещения поддона. Звездочки 5, 6 и 7 охватываются бесконечными цепями 8. Захватные механизмы образованы рычагами 9 с толкающими роликами 10. Рычаги 9 подвижно размещены в муфтах 11, свободно установленных на вертикальных осях 12 вращения, закрепленных на грузовой платформе 1. На цепях 8 закреплены шарниры 13, соединяющие цепи 8 с рычагами 9. Цепи 8, натянутые на звездочки 5, 6 и 7, образуют треугольные трассы, по которым при работе устройства перемещаются шарниры 13. Цепи 8 имеют криволинейные захватные участки, расположенные в зонах огибания ими звездочек 6 и 7, прямолинейные рабочие участки, расположенные между звездочками 6 и 7. В поддоне 14 выполнены карманы 15. На грузовой платформе 1 установлены ролики 16, а в боксе 17 - ролики 18. Ролики 16 и 18 предназначены для поддержания поддона 14 при его перемещении. Устройство также содержит конечные выключатели и тормоз двигателя 2 (не показаны), прекращающие работу устройства в момент полного выхода поддона 14 из бокса 17 на грузовую платформу 1.
Как видно из фиг.1 и 2, в исходном состоянии рычаги 9 с толкающими роликами 10 находятся в нерабочей зоне, в которой толкающие ролики 10 не взаимодействуют с карманами 15 поддона 14. При этом рычаги 9 расположены поперек грузовой платформы 1. При нахождении поддона 14 в боксе 17 (фиг.1) шарниры 13 находятся на участках цепей 8 между звездочками 5 и 6. При нахождении поддона 14 на грузовой платформе 1 (фиг.2) шарниры 13 находятся на участках цепей 8 между звездочками 6 и 7, а толкающие ролики 10 рычагов 9 находятся в карманах 15 поддона 14.
При включении двигателя 2 звездочки 5 начинают вращаться. Цепи 8 движутся по треугольным трассам, увлекая за собой рычаги 9 с установленными на них толкающими роликами 10. При этом рычаги 9, одновременно поворачиваясь на шарнирах 13 и перемещаясь в муфтах 11, перемещают толкающие ролики 10 по траекториям, близким к трассам движения цепей 8. Для перемещения поддона 14 из бокса 17 на грузовую платформу 1 цепи 8 перемещают в направлении от звездочек 5 к звездочкам 6, 7 (фиг.1). При огибании шарнирами 13 звездочек 6 толкающие ролики 10 входят в карманы 15 поддона 14 и захватывают его. При последующем движении происходит смещение поддона 14 из бокса 17 на грузовую платформу 1. В момент полного выхода поддона 14 из бокса 17 срабатывают конечные выключатели и включают тормоз двигателя 2. При этом толкатели 10 рычагов 9 остаются в карманах 15 поддона 14, выполняя роль стопоров в процессе последующей транспортировки поддона 14 на грузовой платформе 1.
Для перемещения поддона 14 с грузовой платформы 1 в бокс 17 двигатель 2 включают в обратном направлении. Цепи 8 перемещаются в направлении от звездочек 5 к звездочкам 7, 6 (фиг.2). Толкатели 10 смещают поддон 14 в бокс 17. При огибании шарнирами 13 звездочек 6 толкающие ролики 10 выходят из карманов 15 поддона 14. С этого момента грузовая платформа 1 свободна и готова к дальнейшей работе.
Работа устройства рассмотрена на примере размещения боксов для поддонов с одной стороны от грузовой платформы. Однако данное устройство точно также работает и при размещении боксов для поддонов с двух сторон от грузовой платформы.
Предлагаемое устройство просто по конструкции, имеет малый износ толкающих роликов вследствие малого по протяженности пути их перемещения в карманах поддонов при их смещении, что повышает надежность и долговечность.

Сущность изобретения: устройство для горизонтального смещения поддона содержит два рычажных захватных механизма с толкающими роликами и привод. Привод связан с захватными механизмами цепными передачами. Захватные механизмы установлены по краям грузовой платформы и снабжены муфтой. Муфта свободно установлена на грузовой платформе на вертикальной оси вращения. В муфте подвижно размещен рычаг захватного механизма. Рычаг шарнирно связан с цепью передачи. Цепь передачи имеет криволинейный захватный участок и прямолинейный рабочий участок. Рабочий участок расположен параллельно направлению смещения поддона. 2 ил.
УСТРОЙСТВО ДЛЯ ГОРИЗОНТАЛЬНОГО СМЕЩЕНИЯ ПОДДОНА, содержащее два рычажных захватных механизма с толкающими роликами, установленные по краям грузовой платформы, и привод, связанный с захватными механизмами цепными передачами, отличающееся тем, что каждый рычажный захватный механизм снабжен муфтой, свободно установленной на грузовой платформе на вертикальной оси вращения, в которой подвижно размещен рычаг захватного механизма, шарнирно связанный с цепью передачи, имеющей криволинейный захватный участок и прямолинейный рабочий участок, расположенный параллельно направлению смещения поддона.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США N 3746191, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
