Изобретение относится к горному делу, а именно к механизмам перемещения секций механизированной крепи и конвейера с навесным оборудованием (далее по тексту - конвейера) в комплексах для подземной добычи полезных ископаемых.
Известен механизм перемещения секции крепи и конвейера, содержащий гидродомкрат передвижки, который присоединяется шарнирно к основанию секции, и толкатель, размещенный в основании секции и соединенный осью с наклонным пазом, выполненным в рештаке конвейера. При этом нижний конец паза расположен позади верхнего конца относительно направления перемещения (Патент ФРГ. Публикация 18.07.85. № 29. Int. Cl. E 21 D 23/04. DE 3401009 A1. Schreitwerksanordnung fur schildaus-bangestelle. См. также с. 36 сборника “Изобретения стран мира”. Реферативная информация. Выпуск 84. МПК E 21. № 3, М., 1986. - 55 с.)
Такое исполнение механизма позволяет при перемещении конвейера обеспечить необходимые величины плеча приложения усилия перемещения относительно забойной кромки лемеха и соответствующего опрокидывающего момента. Под действием указанного момента завальный борт конвейера при его перемещении приподнимается, увеличивая тем самым составляющую веса конвейера, воспринимаемую забойной кромкой лемеха. Увеличение усилия, прижимающего лемех к почве, улучшает условия погрузки угля на конвейер, осуществляемой при перемещении конвейера, и препятствует заезду конвейера на штыб, происходящему при отрыве лемеха от почвы.
В то же время, данное решение не позволяет обеспечить возможность смещения конвейера относительно крепи вдоль лавы, необходимую при волнообразном передвижении конвейера на забой, т.к. ось шарнира, непосредственно связывающего толкатель с конвейером, расположена параллельно линии фронта лавы. Отсутствие возможности смещения конвейера относительно крепи приводит к поломкам механизмов перемещения и порывам соединений между толкателем и конвейером.
Наиболее близким к изобретению по технической сущности является механизм перемещения секций крепи и конвейера, содержащий соединенные между собой гидродомкрат передвижки, связанный с секцией крепи, и толкатель, на котором посредством оси, перпендикулярной плоскости пласта, шарнирно закреплено звено с выполненным в нем пазом, связанное посредством расположенной в этом пазу оси с секцией конвейера, имеющей направляющую, высота профиля которой увеличивается в направлении перемещения конвейера (патент Великобритании № 2216941, кл. Е 21 D 23/08, публ. 18.10.1989). При этом ось секции конвейера, связывающая ее со звеном, расположена горизонтально и размещена в пазу звена, выполненном в виде круглого отверстия. Направляющая установлена на конвейере с возможностью контакта с этой осью при движении последней совместно со звеном относительно направляющей.
Это решение так же, как и первое, позволяет при перемещении конвейера обеспечить достаточно большую величину плеча приложения усилия перемещения относительно забойной кромки лемеха и соответствующего момента, приподнимающего завальный борт конвейера. Причем достигается это, в отличие от первого решения, без подъема всего толкателя, а, в основном, за счет ограниченного разворота звена в вертикальной плоскости, обеспечиваемого боковыми зазорами в соединении звена с толкателем. Это позволяет сохранить рабочее пространство для прохода людей в зоне, находящейся позади места соединения звена с толкателем. К достоинствам прототипа, как и аналога, относится и то, что в процессе перемещения секции крепи передняя часть звена смещается вниз вдоль направляющей. Это не только увеличивает пространство для прохода людей, но и снижает возможные изгибные нагрузки в толкателе и звене за счет уменьшения плеча действия нагрузок.
В то же время, необходимо отметить, что поворот звена и подъем его передней в направлении перемещения части, происходящие в ходе перемещения конвейера, увеличивают габарит по высоте места соединения конвейера со звеном. Следствием этого увеличения габарита по высоте является ограничение области применения оборудования по мощности пластов, особенно актуальное при работе на тонких пластах.
Кроме того, в конструкции прототипа практически сохраняется недостаток конструкции аналога, заключающийся в необеспечении достаточной величины смещения конвейера относительно крепи вдоль лавы (110...150 мм в каждую сторону), необходимой при волнообразном передвижении конвейера на забой. Для обеспечения необходимой величины смещения конвейера в современных конструкциях крепей требуется угловой разворот звена на 25...30° в каждую из сторон. А конструктивное решение прототипа, в котором звено связано с конвейером посредством горизонтальной оси, несмотря на наличие шарнира с вертикальной осью, соединяющего звено с толкателем, существенно ограничивает возможность углового отклонения звена относительно секции конвейера в горизонтальной плоскости (в известных конструкциях - до величины порядка ±10°). Это приводит к поломкам механизмов перемещения и порывам соединений между толкателем и конвейером в процессе волнообразного передвижения конвейера на забой.
В основу изобретения поставлена задача создания механизма перемещения секций крепи и конвейера, в котором путем изменения характера связей и взаимного расположения элементов обеспечивается угловая развязка звена относительно конвейера в горизонтальной плоскости, необходимая для предотвращения поломок механизма при волнообразном передвижении конвейера на забой, а также уменьшается габарит по высоте места соединения конвейера со звеном, что позволяет повысить надежность и долговечность работы механизма перемещения и расширить область его применения, в особенности, при работе на тонких пластах.
Поставленная задача решается за счет того, что механизм перемещения секций крепи и конвейера содержит соединенные между собой гидродомкрат передвижки, связанный с секцией крепи, и толкатель, на котором посредством оси, перпендикулярной плоскости пласта, шарнирно закреплено звено с выполненным в нем пазом, связанное посредством расположенной в этом пазу оси с секцией конвейера. Последняя снабжена направляющей, высота профиля которой увеличивается в направлении перемещения конвейера. Согласно изобретению паз звена выполнен продольным, а направляющая установлена на конвейере с возможностью контакта с нижней поверхностью звена при его движении относительно направляющей.
В отдельных случаях, например при работе в условиях сложной, переменной гипсометрии пласта, направляющую выполняют съемной, с возможностью изменения положения ее профиля относительно конвейера и последующей ее фиксации в этом положении.
Отличительными от прототипа существенными признаками изобретения являются выполнение паза в звене продольным и установка направляющей на конвейере с возможностью контакта с нижней поверхностью звена при его движении относительно направляющей. Эти признаки в сочетании с известными позволяют обеспечить угловую развязку звена относительно конвейера в горизонтальной плоскости, необходимую для предотвращения поломок механизма при волнообразном передвижении конвейера на забой. При этом наличие паза и указанного способа установки направляющей обеспечивают подъем и опускание передней части звена соответственно при выполнении операций выдвижки конвейера и передвижке секции крепи, сохраняя тем самым вышеуказанные достоинства конструкции прототипа.
Кроме того, отличительные признаки механизма перемещения позволяют уменьшить габарит передней в направлении перемещения части звена по высоте и, соответственно, уменьшить общий габарит места соединения конвейера со звеном. Тем самым расширяется вниз возможная область применения механизма по мощности пластов, что особенно актуально при работе на тонких пластах.
Выполнение в отдельных случаях направляющей съемной, с возможностью изменения положения ее профиля относительно конвейера и последующей ее фиксации в этом положении, позволяет выбирать и при необходимости изменять величину плеча действия усилия перемещения конвейера. Вследствие этого улучшается управляемость процессом перемещения конвейера при работе в условиях сложной, переменной гипсометрии пласта.
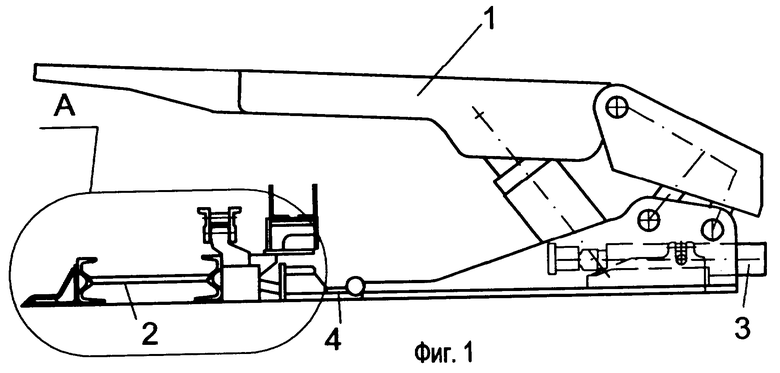
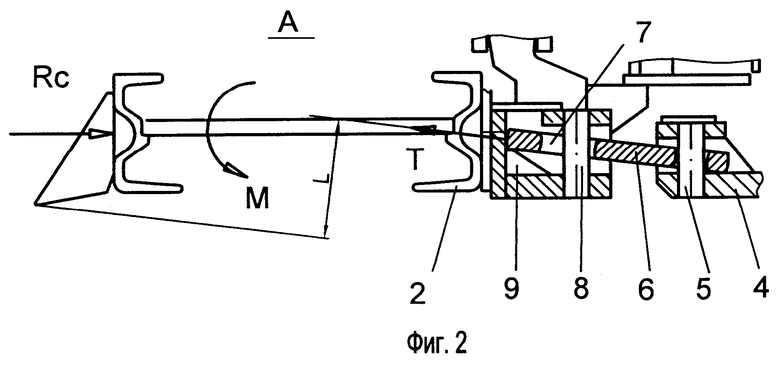
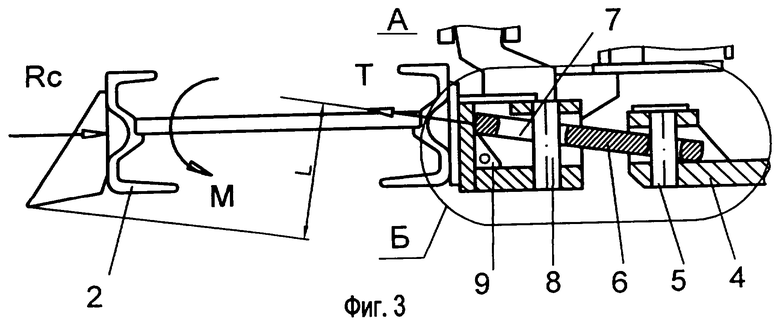
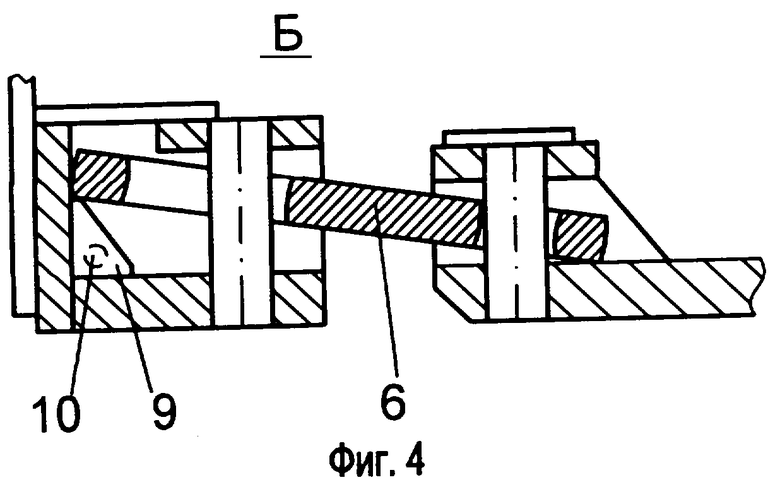
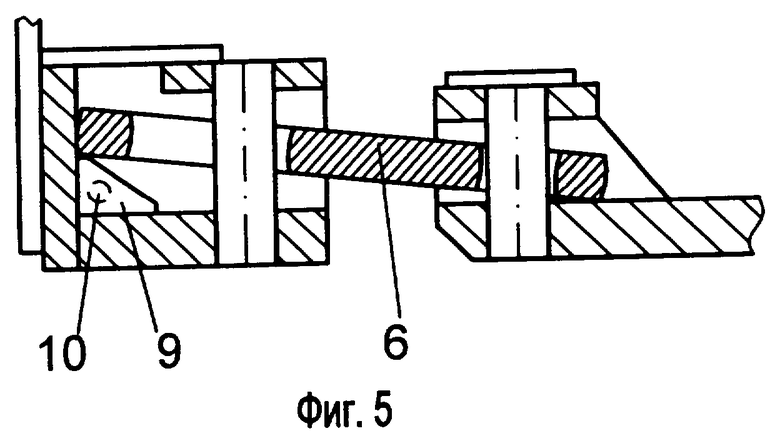
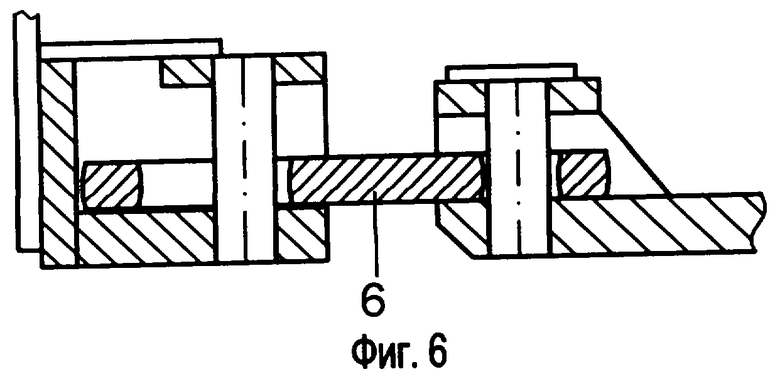
На фиг. 1 показан первый пример выполнения механизма перемещения согласно изобретению. На фиг. 2 показан вид А на фиг.1, а также силы и моменты, действующие на передвигаемую секцию конвейера. На фиг. 3 показан механизм перемещения в частном случае выполнения с направляющей, установленной с возможностью смещения ее профиля относительно конвейера. На фиг. 4 показан вид Б на фиг.3. На фиг. 5 показан вид Б на фиг.3 с измененным положением профиля направляющей. На фиг. 6 показан вид Б на фиг.3 без направляющей.
Пример выполнения механизма перемещения секций крепи 1 и конвейера 2 (фиг. 1, 2) содержит соединенные между собой гидродомкрат передвижки (ГП) 3, связанный с секцией крепи 1, и толкатель 4, на котором посредством оси 5, перпендикулярной плоскости пласта, шарнирно закреплено соединительное звено 6 с продольным пазом 7. Звено связано посредством оси 8, размещенной в пазу 7, с секцией конвейера 2. На секции конвейера 2 закреплена направляющая 9, высота профиля которой увеличивается в направлении перемещения. Направляющая 9 установлена с возможностью контакта с нижней поверхностью соединительного звена 6 при его относительном движении.
Механизм перемещения секций крепи и конвейера работает следующим образом.
Перемещение разгруженной секции крепи осуществляется посредством раздвижки ГП (фиг. 1, 2). При этом цилиндр ГП 3 и толкатель 4 с звеном 6 удаляются от забоя на длину паза 7, причем ближний к конвейеру конец звена опускается вдоль направляющей 9 в нижнее положение, после чего начинается собственно перемещение секции крепи 1 к конвейеру 2.
При перемещении конвейера базой является распертая секция крепи. Перемещение осуществляется путем складывания ГП 3. Его цилиндр передвигается в направлении забоя, передавая усилие на толкатель 4 и звено 6. Ближний к конвейеру конец звена 6 при этом смещается вверх по профилю направляющей 9. Соответственно изменяется направление усилия Т, передаваемого через соединительное звено на секцию конвейера от ГП и толкателя: увеличивается плечо L усилия и момент М, приподнимающий завальный борт конвейера. Это, как и в конструкции прототипа, приводит к увеличению усилия, прижимающего лемех к почве, улучшая условия погрузки угля на конвейер и препятствуя заезду конвейера на штыб.
В то же время, при смещении конвейера вдоль забоя, происходящем в процессе волнообразного передвижения конвейера, звено 6 разворачивается в горизонтальной плоскости вокруг осей 5 и 8 относительно соответственно толкателя 4 и конвейера 2. Это позволяет компенсировать поперечное смещение конвейера 2 относительно толкателя 4 и, таким образом, предотвратить поломку механизма перемещения.
Уменьшение в сравнении с прототипом высоты передней в направлении перемещения части звена 6 достигается вследствие отсутствия в этой части звена отверстия для горизонтальной оси. При этом необходимые прочностные параметры звена достигаются варьированием ширины звена. Следствием указанного является уменьшение общего габарита места соединения конвейера со звеном и расширение вниз возможной области применения механизма перемещения.
Представленный на фиг.3 пример выполнения механизма перемещения со съемной направляющей, обеспечивающий возможность изменения положения ее профиля относительно конвейера с последующей фиксацией, позволяет варьировать величиной плеча L действия усилия Т и соответственно момента М, приподнимающего завальный борт конвейера. При этом ось 10 фиксирует направляющую 9 в одном из возможных ее положений (см. фиг. 4, 5).
Регулировка величины момента М, обеспечиваемая посредством изменения положения направляющей (фиг. 4, 5) и возможностью снятия ее с конвейера (фиг. 6), позволяет повысить эффективность работы механизма перемещения в условиях сложной и переменной гипсометрии пласта, в частности при работе на пластах с геологическими нарушениями по почве.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перемещения секций крепи и конвейера | 2001 |
|
RU2219348C2 |
| Механизм перемещения секций крепи и конвейера | 2001 |
|
RU2219347C2 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2001 |
|
RU2215153C2 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2001 |
|
RU2215156C2 |
| Агрегат для выемки мощных угольных пластов | 1985 |
|
SU1273591A1 |
| Механизированная крепь сопряжения | 1989 |
|
SU1716151A1 |
| СПОСОБ КРЕПЛЕНИЯ И УПРАВЛЕНИЯ КРОВЛЕЙ В ОЧИСТНОМ ЗАБОЕ, КРЕПЬ ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА, МЕХАНИЗМ ТЕЛЕСКОПИЧЕСКОЙ ЗАТЯЖКИ ЗАЗОРОВ ПО КРОВЛЕ И ЗАВАЛУ, СОЕДИНЕНИЕ ОСНОВАНИЙ СЕКЦИЙ, НАПРАВЛЯЮЩАЯ БАЛКА КРЕПИ, МЕХАНИЗМ РАСПОРА СЕКЦИЙ КРЕПИ, МЕХАНИЗМ СКЛАДЫВАНИЯ КРЕПИ, КОЗЫРЕК ПЕРЕКРЫТИЯ КРЕПИ | 2001 |
|
RU2200843C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ВЫЕМОЧНОЙ МАШИНЫ | 2005 |
|
RU2291962C1 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ КОНВЕЙЕРА И СЕКЦИИ КРЕПИ | 2006 |
|
RU2313670C1 |
| Секция механизированной крепи | 2001 |
|
RU2219344C2 |
Изобретение относится к горному делу и может использоваться в механизированных комплексах для подземной добычи полезных ископаемых. Задачей изобретения является увеличение усилия прижатия лемеха к почве, улучшение условий погрузки угля на конвейер, снижение потерь угля и улучшение управляемости работой оборудования. Механизм перемещения секций крепи и конвейера содержит соединенные между собой гидродомкрат передвижки, связанный с секцией крепи, и толкатель, на котором посредством оси, перпендикулярной плоскости пласта, шарнирно закреплено звено с выполненным в нем пазом, связанное посредством расположенной в этом пазу оси с секцией конвейера, имеющей направляющую, высота профиля которой увеличивается в направлении перемещения конвейера. Паз звена выполнен продольным. Направляющая установлена на конвейере с возможностью контакта с нижней поверхностью звена при его движении относительно направляющей. Направляющая может быть выполнена съемной, с возможностью изменения положения ее профиля относительно конвейера и последующей ее фиксации в этом положении. 1 з.п. ф-лы, 6 ил.
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ С ИСПОЛЬЗОВАНИЕМ СУШЁНОГО РАСТИТЕЛЬНОГО СЫРЬЯ | 2002 |
|
RU2216941C1 |

