Изобретение относится к горному делу, а именно к механизмам перемещения секций механизированной крепи и конвейера с навесным оборудованием (далее по тексту - конвейера) в комплексах для подземной добычи полезных ископаемых.
Известен механизм перемещения секции крепи, содержащий гидродомкрат передвижки (ГП), который присоединяется шарнирно к основанию секции, и толкатель, размещенный в основании секции и соединенный осью с продольным пазом, выполненным в рештаке конвейера. (Патент ФРГ. Публикация 18.07.85. № 29. Int. Cl. E 21 D 23/04. DE 3401009 A1. Schreitwerksanordnung fur schildaus-bangestelle. См. также с.36 сборника “Изобретения стран мира”. Реферативная информация. Выпуск 84. МКИ E 21. № 3, М., 1986. - 55 с.)
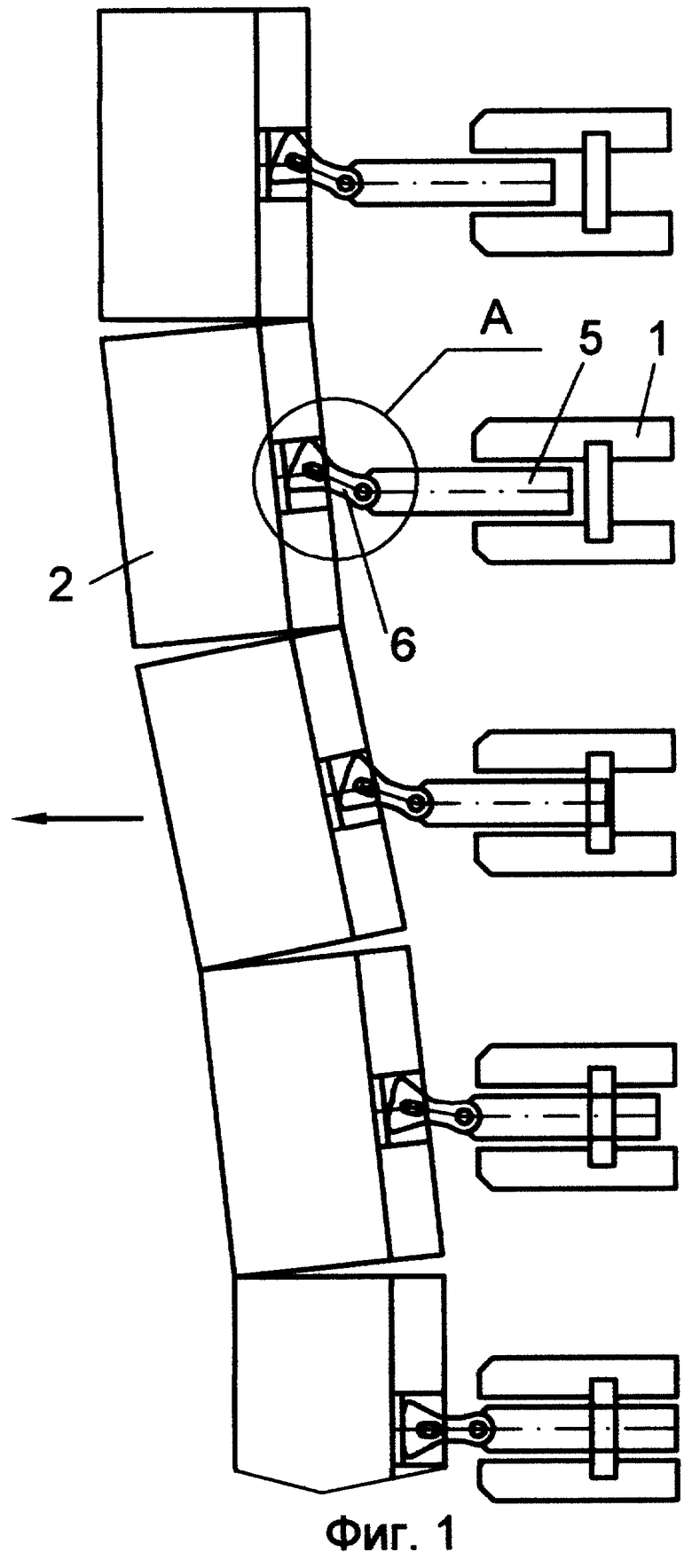
Предложенный механизм не позволяет обеспечить возможность смещения конвейера относительно крепи вдоль лавы, необходимую при волнообразном передвижении конвейера на забой (см. фиг. 1), т.к. ось шарнира, непосредственно связывающего толкатель с конвейером, расположена параллельно линии фронта лавы. Отсутствие возможности смещения конвейера относительно крепи приводит к поломкам механизмов перемещения и порывам соединений между толкателем и конвейером.
Наиболее близким к изобретению по технической сущности является механизм перемещения секций крепи и конвейера, содержащий соединенные между собой гидродомкрат передвижки, связанный с секцией крепи, и толкатель, на котором посредством оси, перпендикулярной плоскости пласта, шарнирно закреплено звено с заплечиком, расположенным на его передней в направлении перемещения грани, и с выполненным в нем пазом, связанное посредством расположенной в этом пазу оси с конвейером, секция которого имеет упор, расположенный с возможностью контакта с заплечиком звена (патент Великобритании № 2216941, кл. E 21 D 23/08, публ. 18.10.1989). При этом ось, связывающая звено с секцией конвейера, расположена горизонтально, а заплечик размещен по оси симметрии звена на верхней части его передней грани.
В конструкции прототипа практически сохраняется недостаток конструкции аналога, заключающийся в необеспечении достаточной величины смещения конвейера относительно крепи вдоль лавы (110...150 мм в каждую сторону), необходимой при волнообразном передвижении конвейера на забой. Для обеспечения необходимой величины смещения конвейера в современных конструкциях крепей требуется угловой разворот звена на 25...30° в каждую из сторон. А конструктивное решение прототипа, в котором звено связано с конвейером посредством горизонтальной оси, несмотря на наличие шарнира с вертикальной осью, соединяющего звено с толкателем, существенно ограничивает возможность углового отклонения звена относительно секции конвейера в горизонтальной плоскости (в известных конструкциях - до величины порядка ±10°). Это приводит к поломкам механизмов перемещения и порывам соединений между толкателем и конвейером в процессе волнообразного передвижения конвейера на забой.
Необходимо отметить, что в конструкции прототипа с увеличением угла разворота звена в горизонтальной плоскости пропорционально возрастают поперечные нагрузки на толкатель при перемещении конвейера. Рост поперечных нагрузок на толкателе приводит не только к увеличению напряжений в его конструкции, но и к увеличению трения между толкателем и основанием секции крепи, что снижает усилие перемещения конвейера.
Отметим также, что высота места соединения конвейера со звеном имеет существенное значение для определения нижней границы области применения оборудования по мощности пластов. Уменьшение этой высоты позволяет соответственно уменьшить нижний предел области применения механизма перемещения, что особенно актуально при работе на тонких пластах.
В основу изобретения поставлена задача создания механизма перемещения секций крепи и конвейера, в котором путем изменения характера связей и взаимного расположения элементов обеспечивается существенное увеличение угловой развязки звена относительно конвейера в горизонтальной плоскости, необходимое для предотвращения поломок механизма при волнообразном передвижении конвейера на забой, причем достигается это без увеличения поперечных нагрузок, действующих на толкатель. Это позволяет повысить надежность и эффективность работы механизма перемещения. Дополнительной задачей является уменьшение габарита по высоте места соединения конвейера со звеном, позволяющее расширить область его применения, в особенности, при работе на тонких пластах.
Поставленная задача решается за счет того, что механизм перемещения секций крепи и конвейера содержит соединенные между собой гидродомкрат передвижки, связанный с секцией крепи, и толкатель, на котором посредством оси, перпендикулярной плоскости пласта, шарнирно закреплено звено с заплечиком, расположенным на его передней в направлении перемещения грани. Звено связано с конвейером посредством оси, расположенной в пазу звена. Секция конвейера имеет упор, расположенный с возможностью контакта с заллечиком звена. Согласно изобретению паз в звене выполнен продольным для направленного перемещения установленной в нем оси при волнообразном перемещении конвейера к забою и повороте звена. При этом звено выполнено с двумя заплечиками, которые расположены по обе стороны оси симметрии звена на его передней в направлении перемещения грани с возможностью контактирования с упором конвейера.
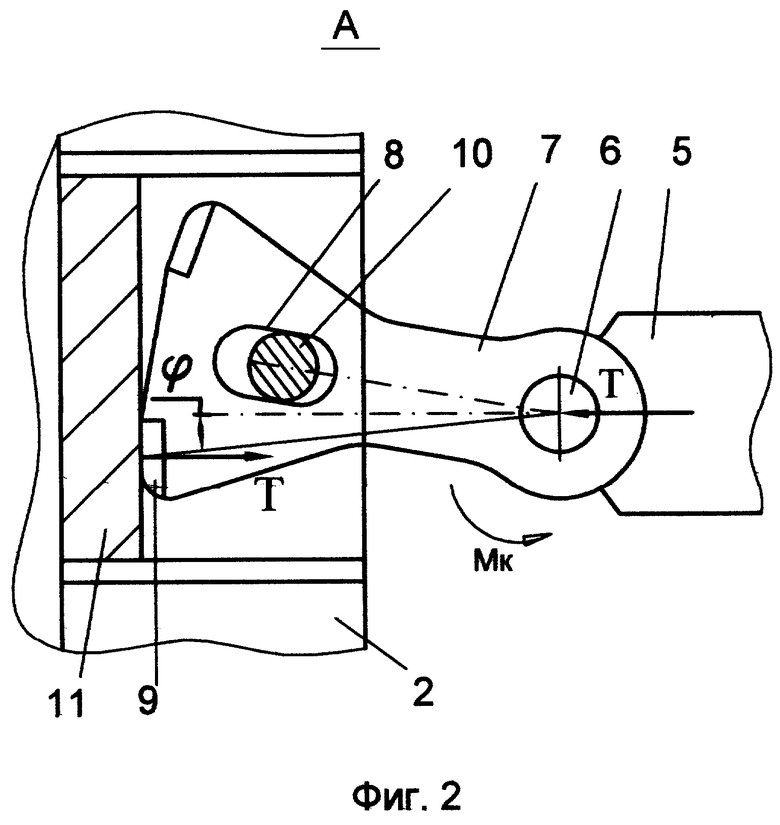
Соединение звена с конвейером в механизме перемещения согласно изобретению позволяет существенно увеличить угловую развязку звена относительно конвейера в горизонтальной плоскости, предотвращая этим поломки механизма при волнообразном передвижении конвейера на забой. Выполнение паза в звене продольным и вышеуказанное расположение двух заплечиков на звене обеспечивают при повороте звена, возникающем вследствие смещения конвейера, образование в механизме перемещения компенсационного вращающего момента Мк (см. фиг.2). Этот момент создается усилием перемещения Т конвейера, передаваемым от ГП через толкатель, звено и один из заплечиков звена на конвейер. Наличие компенсационного момента Мк существенно снижает поперечные нагрузки на толкатель, величина которых пропорциональна углу передачи усилия ϕ и создает тенденцию "выравнивания" звена относительно оси толкателя.
Кроме того, отличительные признаки механизма перемещения позволяют уменьшить габарит передней в направлении перемещения части звена по высоте и, соответственно, уменьшить общий габарит места соединения конвейера со звеном. Тем самым расширяется вниз возможная область применения механизма по мощности пластов, что особенно актуально при работе на тонких пластах.
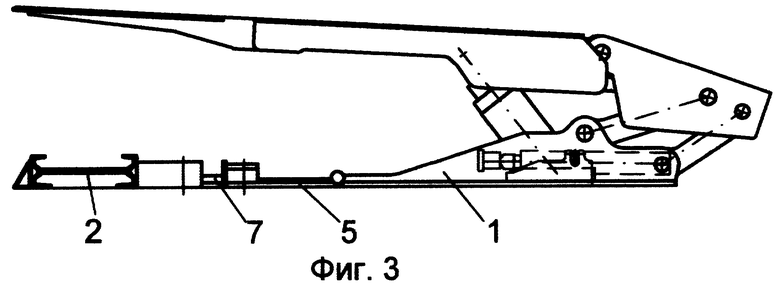
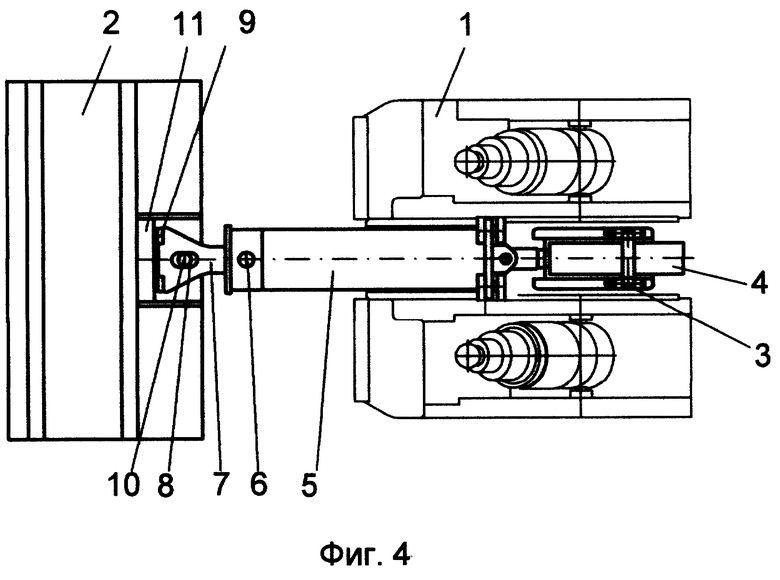
На фиг. 1 показан процесс волнообразного перемещения конвейера на забой, осуществляемый механизмами перемещения согласно изобретению. На фиг. 2 показаны усилия и компенсационные моменты, действующие на звено в месте А на фиг.1. На фиг. 3 показан пример выполнения механизма перемещения секций крепи и конвейера на виде поперечного сечения лавы. На фиг. 4 показан вид сверху на механизм перемещения секций крепи и конвейера, представленный на фиг. 3.
Механизм перемещения секций крепи 1 и конвейера 2 (см. фиг. 3, 4) состоит из соединенных шарнирами 3 гидродомкрата передвижки 4, связанного с секцией крепи 1, и толкателя 5, на котором посредством оси 6, перпендикулярной плоскости пласта, шарнирно закреплено звено 7 с выполненными в нем продольным пазом 8 и заплечиками 9. На конвейере перпендикулярно плоскости пласта размещена ось 10 и упор 11. Продольный паз 8 в звене 7 выполнен для направленного перемещения установленной в нем оси 10 при волнообразном перемещении конвейера к забою и повороте звена 7. Заплечики 9 расположены по обе стороны оси симметрии звена 7 на его передней в направлении перемещения грани с возможностью контактирования с упором 11 конвейера.
Механизм перемещения секций крепи и конвейера работает следующим образом.
При перемещении секций крепи 1 стационарной базой является конвейер 2.
Перемещение разгруженной секции крепи осуществляется посредством раздвижки ГП 4 (см. фиг. 4). При этом цилиндр ГП и толкатель 5 со звеном 7 удаляются от забоя на длину паза 8, ось 10 нагружена усилием перемещения секции, а шток ГП выдвигается и перемещает секцию крепи к конвейеру. При перемещении конвейера базой являются секции крепи. Перемещение осуществляется путем складывания ГП 4. Его цилиндр передвигается в направлении забоя, давит через шарниры 3 на толкатель 5, посредством оси 6 на звено 7 и через опорный заплечик 9 на упор 11 конвейера. В ходе волнообразного перемещения секций конвейера к забою звено 7 поворачивается вокруг оси 6, вследствие чего возникает компенсационный момент Мк (см. фиг. 1, 2). Ось 10 при этом не воспринимает непосредственно усилие перемещения, а выступает в качестве направляющей звена 7, взаимодействуя с пазом 8. Возникновение компенсационного момента Мк существенно снижает поперечные нагрузки на толкатель, величина которых пропорциональна углу передачи усилия ϕ, и создает тенденцию "выравнивания" звена относительно оси толкателя. Таким образом, механизм перемещения обеспечивает существенное увеличение угловой развязки звена относительно конвейера в горизонтальной плоскости, необходимое для предотвращения поломок механизма при волнообразном передвижении конвейера на забой, причем достигается это без увеличения поперечных нагрузок, действующих на толкатель.
Уменьшение в сравнении с прототипом высоты передней в направлении перемещения части звена 7, в зоне которой установлены заплечики 9, достигается благодаря отсутствию в этой части звена отверстия для горизонтальной оси. При этом необходимые прочностные параметры звена достигаются, в частности, увеличением ширины звена 7. Следствием указанного является уменьшение общего габарита места соединения конвейера со звеном и расширение вниз возможной области применения механизма перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перемещения секций крепи и конвейера | 2001 |
|
RU2219348C2 |
| Механизм перемещения секций крепи и конвейера | 2001 |
|
RU2219346C2 |
| Выемочно-доставочная машина | 1990 |
|
SU1747688A1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2001 |
|
RU2215156C2 |
| Секция механизированной крепи | 1985 |
|
SU1308766A1 |
| Механизированная крепь сопряжения | 1989 |
|
SU1716151A1 |
| Прицепное устройство базовой балки механизированной крепи | 1988 |
|
SU1610038A1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2001 |
|
RU2215153C2 |
| Механизированный очистнойКОМплЕКС СОВМЕщЕННОй ВыЕМКи | 1978 |
|
SU798315A1 |
| СЕКЦИЯ КРЕПИ ОЧИСТНОГО МЕХАНИЗИРОВАННОГО КОМПЛЕКСА | 1991 |
|
RU2027012C1 |
Изобретение относится к горному делу и может использоваться в механизированных комплексах для подземной добычи полезных ископаемых. Задачей изобретения является повышение надежности и долговечности механизма перемещения. Механизм перемещения секций крепи и конвейера содержит соединенные между собой гидродомкрат передвижки, связанный с секцией крепи, и толкатель, на котором посредством оси, перпендикулярной плоскости пласта, шарнирно закреплено звено с заплечиком, расположенным на его передней в направлении перемещения грани, и с выполненным в нем пазом, связанное посредством расположенной в этом пазу оси с конвейером, секция которого имеет упор, расположенный с возможностью контакта с заплечиком звена, отличающийся тем, что паз звена выполнен продольным для направленного перемещения установленной в нем оси при волнообразном перемещении конвейера к забою и повороте звена, выполненного с двумя заплечиками, которые расположены по обе стороны оси симметрии звена на его передней в направлении перемещения грани с возможностью контактирования с упором конвейера. 4 ил.
Механизм перемещения секций крепи и конвейера, содержащий соединенные между собой гидродомкрат передвижки, связанный с секцией крепи, и толкатель, на котором посредством оси, перпендикулярной плоскости пласта, шарнирно закреплено звено с заплечиком, расположенным на его передней в направлении перемещения грани, и с выполненным в нем пазом, связанное посредством расположенной в этом пазу оси с конвейером, секция которого имеет упор, расположенный с возможностью контакта с заплечиком звена, отличающийся тем, что паз звена выполнен продольным для направленного перемещения установленной в нем оси при волнообразном перемещении конвейера к забою и повороте звена, выполненного с двумя заплечиками, которые расположены по обе стороны оси симметрии звена на его передней в направлении перемещения грани с возможностью контактирования с упором конвейера.
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ С ИСПОЛЬЗОВАНИЕМ СУШЁНОГО РАСТИТЕЛЬНОГО СЫРЬЯ | 2002 |
|
RU2216941C1 |

