Предлагаемое изобретение относится к измерительной технике, в частности к вибрационным гироскопическим приборам, предназначенным для измерения угловой скорости.
Известен гироскоп-акселерометр, который состоит из одной кремневой и двух стеклянных пластин. В кремниевой пластине путем травления сформированы базовая рамка и два маятниковых узла, которые связаны с рамкой с помощью упругих перемычек. Маятники могут упруго перемещаться вдоль оси, нормальной плоскости пластины (патент США 5392650, кл. 73/517 А, 1995 г.).
Система возбуждения может вызывать колебания маятниковых узлов в противофазе в плоскости пластины, что, по сути, эквивалентно вращению всей пластины вокруг оси, перпендикулярной ее плоскости. При наличии вращения основания, на котором установлен акселерометр-гироскоп, его маятники под действием сил Кориолиса начнут совершать колебания с частотой возбуждения. Амплитуды колебаний маятников зависят от угловой скорости поворота прибора (здесь не рассматриваются смещения маятников, обусловленные движением прибора с ускорением).
На базовую рамку кремниевой пластины с двух сторон жестко закреплены две стеклянные пластины с элекродами, которые совместно с кремниевой пластиной как общим электродом образуют пару дифференциальных емкостных датчиков смещения маятников.
Основными недостатками рассмотренного акселерометра-гироскопа являются, во-первых, невозможность изготовления кремниевой пластины с идентичными маятниковыми узлами, что приводит к дополнительной погрешности прибора, и, во-вторых, в данной конструкции достаточно сложно осуществить режим резонансной настройки колебаний маятников и маятниковых узлов.
Известен вибрационный гироскоп, который имеет корпус с установленным в нем узлом вибрирующего кольца, называемым также роторным узлом.
Роторный узел выполнен из единой пластины монокристалла кремния и состоит из ротора в виде внешнего кольца и внутренней ступицы, которые связаны друг с другом упругими элементами. Ступица соединена с корпусом также упругими связями. При этом ротор может совершать угловые колебания вокруг двух взаимно ортогональных осей (вокруг оси, нормальной плоскости кольца, и оси, расположенной в плоскости кольца).
В гироскопе электростатически могут быть возбуждены угловые колебания ротора вокруг оси, нормальной его плоскости (оси возбуждения). При наличии вращения корпуса гироскопа под действием сил Кориолиса его ротор начинает совершать колебания вокруг второй оси (выходной оси) с амплитудой, которая пропорциональна угловой скорости поворота.
На корпусе гироскопа образована диэлектрическая подложка (изоляционный слой), на которой имеется два электрода. Электроды совместно с кремниевым ротором (как общим электродом) образуют дифференциальный емкостный датчик смещения ротора (патент США 5555765, кл. 73/504.09, 1996).
Указанный вибрационный гироскоп наиболее близок к изобретению и поэтому принят за прототип. Необходимо указать следующие недостатки прототипа:
1. Роторный узел представляет собой двустепенную связанную колебательную систему, в которой влияние одной оси на другую определяется соотношением моментов инерции узла. Наличие такого влияния приводит к погрешностям гироскопа.
2. Электроды дифференциального датчика смещения ротора и электроды электростатического возбуждения ротора имеют друг с другом емкостную связь, что приводит к влиянию системы возбуждения на систему измерения и, соответственно, к ошибкам гироскопа.
3. В данной конструкции гироскопа трудно осуществить возбуждение ротора с достаточно большой амплитудой, что ограничивает достижения высокой чувствительности прибора.
Техническим результатом настоящего изобретения является повышение точности измерения за счет снижения взаимного влияния колебаний двустепенной колебательной системы по осям колебаний, а также системы возбуждения на систему измерения и повышение чувствительности прибора.
Указанный технический результат достигается тем, что в известный вибрационный гироскоп, содержащий корпус, а также выполненный из единой пластины монокристалла кремния роторный узел из упруго связанных между собой ротора и ступицы, упругий подвес, соединяющий ступицу с корпусом, изоляционные пластины с электродами, для достижения указанного технического результата введено четное число магнитных систем, представляющих собой каждая подковообразный магнитопровод с плоскими постоянными магнитами на концах, между которыми образован плоский зазор, причем ступица выполнена в виде прямоугольной пластины с базирующими платиками, расположенными по ее углам и в центре симметрично с двух сторон, ротор - в виде рамки, охватывающей ступицу с зазором по периметру и связанной с ней двумя упругими плоскими перемычками, расположенными симметрично с двух сторон ступицы, а на базирующие платики ступицы установлены симметрично с двух сторон с зазором относительно рамки прямоугольные изоляционные пластины, контур которых совпадает с контуром рамки, при этом в каждой изоляционной пластине металлизацией на внутренней стороне напротив рамки образованы два электрода, на внешней стороне по ее периметру - плоская катушка, а ступица и изоляционные пластины связаны с корпусом упругим подвесом, ось которого перпендикулярна плоскости пластин и проходит через общий центр масс роторного узла и изоляционных пластин; причем участки катушек на изоляционных пластинах размещены в магнитном поле зазора каждой магнитной системы, а электроды, катушки на изоляционных пластинах и ступица снабжены для связи с сервоэлектроникой упругими токоподводами.
Кроме того, в плечах рамки, параллельных проходящей через упругие плоские перемычки оси, могут быть образованы сквозные продольные прорези.
Кроме того, упругий подвес может быть выполнен в виде одного упругого стержня с утолщением в середине, который проходит через отверстия, образованные в центрах всех пластин, и жестко скреплен своим утолщением со ступицей и изоляционными пластинами; при этом ось стержня перпендикулярна плоскости пластин и проходит через общий центр масс роторного узла и изоляционных пластин.
Кроме того, упругий подвес может быть выполнен в виде двух соосных упругих стержней.
Кроме того, стержни могут быть связаны с корпусом с помощью двух плоских пружин, плоскости которых перпендикулярны осям стержней.
Кроме того, в нем могут быть использованы магнитные системы, каждая из которых состоит из двух П-образных магнитопроводов с плоскими магнитами на концах, установленных друг против друга с образованием двух плоских зазоров.
Предлагаемое изобретение поясняется чертежами.
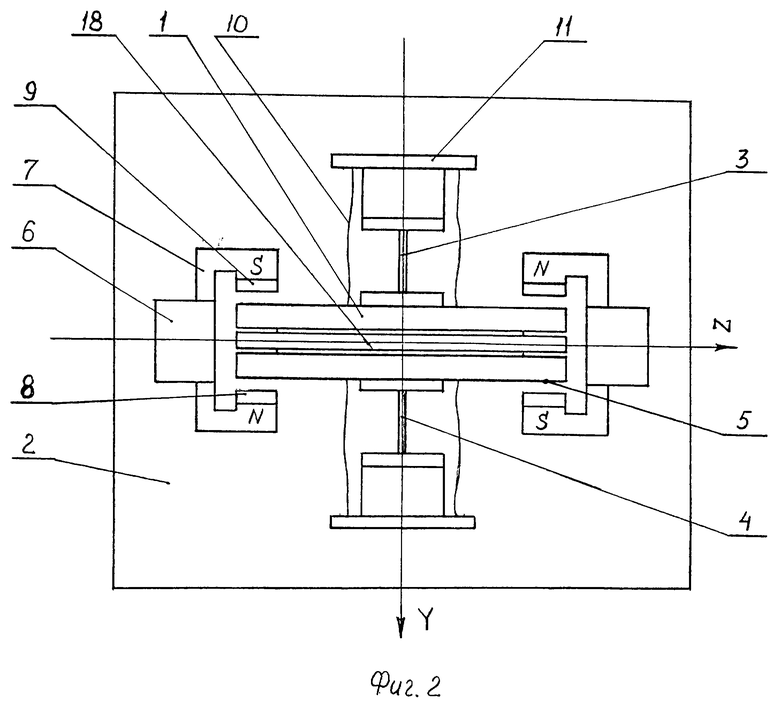
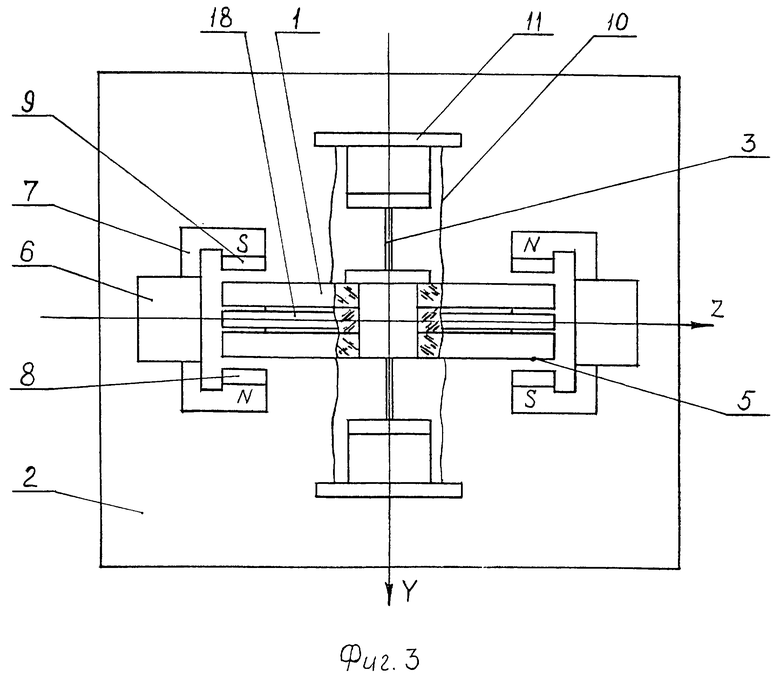
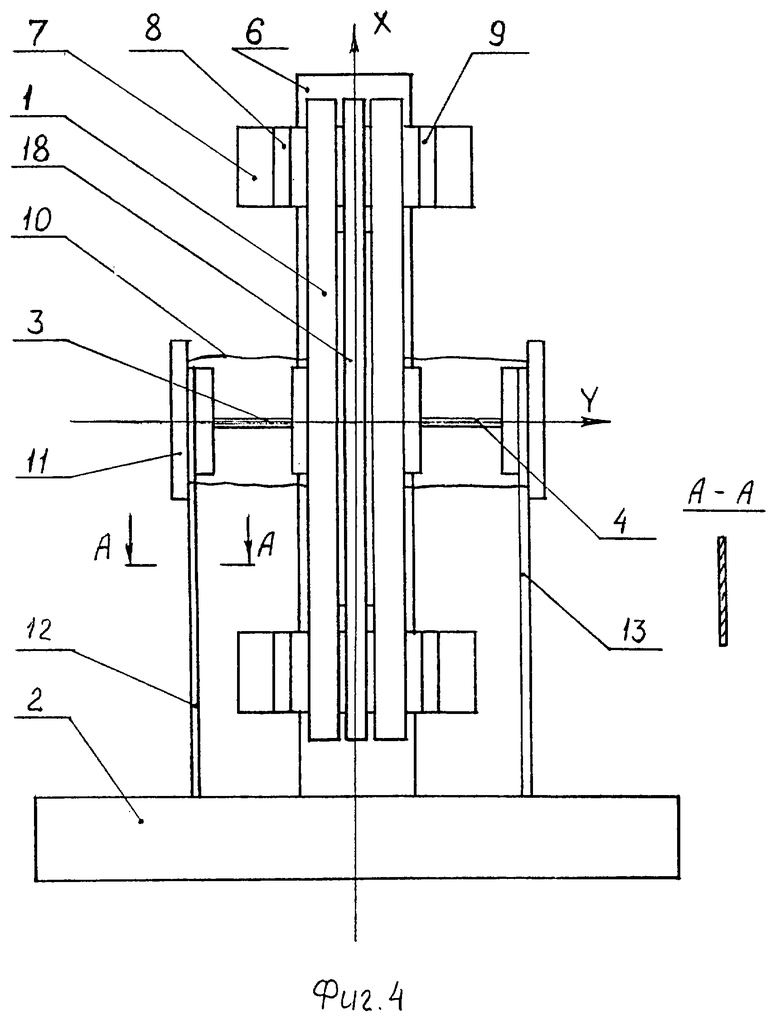
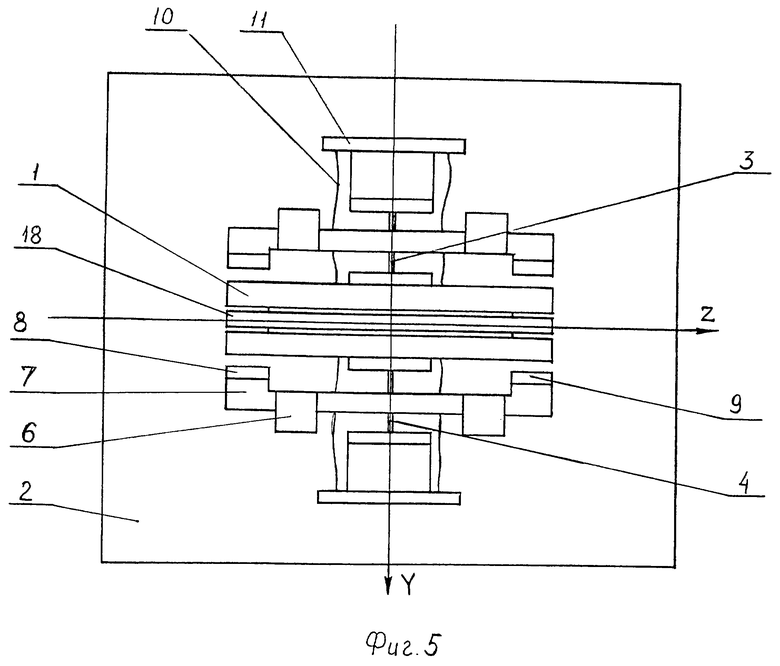
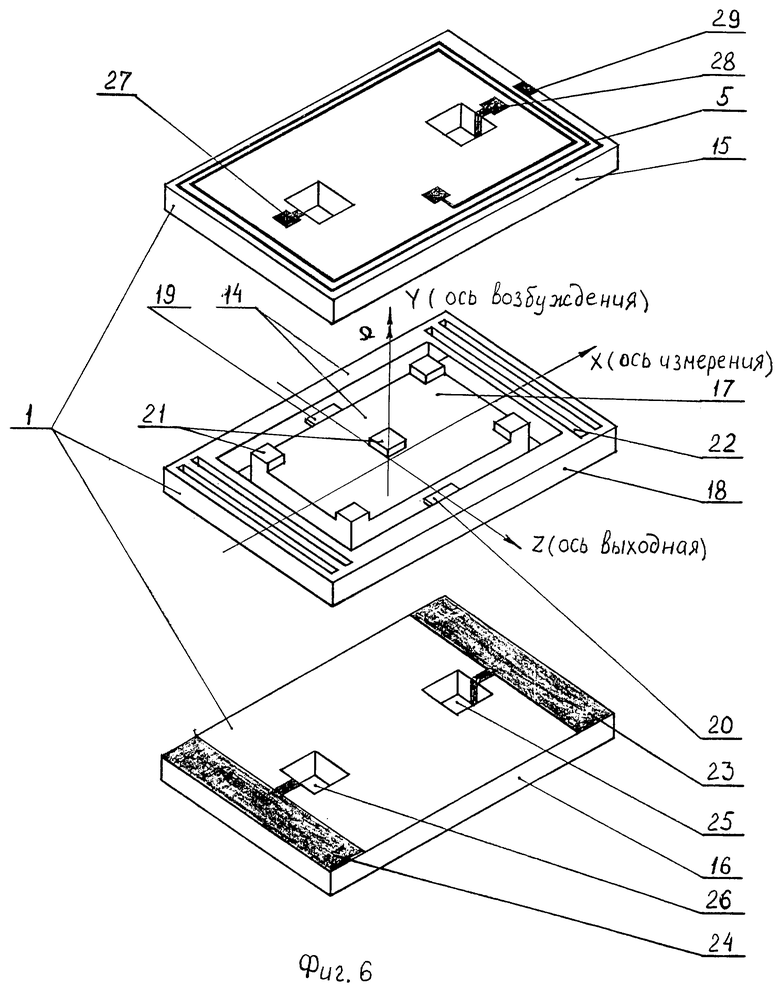
На фиг. 1 показан вибрационный гироскоп (вид спереди); на фиг.2 показан вибрационный гироскоп (вид сверху) с упругим подвесом в виде двух упругих элементов; на фиг. 3 показан вибрационный гироскоп (вид сверху), в котором подвес пакета в корпусе осуществляется с помощью одного упругого элемента; на фиг.4 показан вибрационный гироскоп (вид сбоку), в котором крепление упругих элементов к корпусу выполнено через плоские пружины; на фиг.5 показан вибрационный гироскоп (вид сверху), в котором использованы две магнитные системы, каждая из которых имеет два зазора магнитной цепи; на фиг.6 показано конструктивное выполнение основного узла вибрационного гироскопа - пакета, образованного роторным узлом и двумя изоляционными пластинами (пакет показан до соединения роторного узла и пластин).
Вибрационный гироскоп содержит пакет 1, состоящий из роторного узла и соединенных с его ступицей двух изоляционных пластин, который подвешен к корпусу 2 с помощью упругих элементов 3, 4. В том случае, когда пакет 1 подвешен в корпусе 2 с помощью упругого подвеса в виде одного упругого элемента 3, он представляет собой стержень с тремя утолщениями (два на концах, один посередине). Концевыми утолщениями стержень крепится к корпусу, а средним - к пакету 1. Для крепления стержня в центре пакета выполнено отверстие. Такое конструктивное исполнение подвеса пакета гироскопа позволяет снизить погрешность прибора. В том случае, когда пакет подвешен в корпусе с помощью упругого подвеса в виде двух упругих элементов 3, 4, каждый из них представляет собой стержень с утолщениями на концах, одним из которых он крепится к пакету 1, а другим - к корпусу 2 таким образом, что стержни перпендикулярны плоскости пакета и проходят через его центр масс. При этом весь пакет 1 может совершать угловые колебания вокруг оси, совпадающей с осями стержней (оси Y - оси возбуждения).
Участки пакета 1 с витками катушек 5 размещены в зазорах четырех магнитных систем с постоянными магнитами, установленных на стойках 6 корпуса 2. Каждая из магнитных систем представляет собой подковообразный магнитопровод 7 с постоянными магнитами 8, 9 на концах.
Контактные площадки на внешних сторонах изоляционных пластин пакета 1, электрически соединенные с электродами, ступицей роторного узла и концами катушек, с помощью упругих токоподводов 10 через промежуточную контактную плату 11 подключены к сервисной электронике, на чертежах не показанной. Для уменьшения момента упругих сил вокруг оси Y токоподводы 10, по возможности, необходимо располагать параллельно стержням 3, 4 и как можно ближе к ним. Упругие стержни 3, 4, на которых подвешен пакет 1, могут быть связаны с корпусом 2 посредством двух плоских пружин 12, 13. Плоскости пружин 12, 13 параллельны плоскости пакета 1 и перпендикулярны стержням 3, 4. Плоские пружины 12, 13 выполняют роль компенсаторов температурного расширения стержней 3, 4. В конструкции гироскопа могут быть использованы две магнитные системы, в зазорах которых размещается пакет из роторного узла и двух изоляционных пластин. Каждая магнитная система в этом случае состоит из двух П-образных магнитопроводов 7 с плоскими постоянными магнитами 8, 9 на концах и имеет два зазора магнитной цепи. Использование таких магнитных систем позволяет в некоторых случаях уменьшить габариты прибора.
Пакет 1 состоит из роторного узла 14 и двух жестко соединенных с его ступицей изоляционных пластин 15, 16.
Роторный узел 14 выполнен из единой пластины монокристаллического кремния в виде элемента, симметричного относительно трех проходящих через его центр масс ортогональных осей XYZ. Роторный узел 14 состоит из ступицы, выполненной в виде прямоугольной пластины 17, ротора - в виде рамки 18, охватывающей ступицу с зазором по периметру. Ступица и ротор связаны друг с другом двумя упругими плоскими перемычками 19, 20, расположенными симметрично с двух сторон ступицы. Эти перемычки образуют упругий шарнир, который позволяет рамке 18 совершать угловые колебания вокруг одной из осей симметрии роторного узла, расположенных в его плоскости (оси Z - выходной оси).
Ступица имеет симметрично с двух сторон по пять (четыре по углам и один в центре) равновысоких выступа - базирующие платики 21, на которые жестко устанавливаются две одинаковые изоляционные пластины 15, 16. При этом между каждой из пластин 15, 16 и рамкой 18 образуется зазор порядка 20 мкм. Соединение пластин 15, 16 и ступицы осуществляется либо диффузионной сваркой, для чего на места контактов напылена металлизация; либо с помощью клея.
В плечах рамки 18, параллельных оси ее поворота Z, выполнены сквозные прорези 22. Размеры прорезей выбраны такими, чтобы добротность колебаний рамки 18 вокруг оси Z при атмосферном давлении газовой среды была бы не менее 10.
Каждая из одинаковых пластин 15, 16 изготовлена из изоляционного материала, имеющего близкий к кремнию коэффициент температурного линейного расширения (специальные марки керамики, стекла, сигала и т.д.), и по контуру совпадает с контуром рамки 18. На каждой из пластин 15, 16 со стороны рамки 18 напротив ее плеч с прорезями 22 металлизацией образованы два электрода 23, 24, которые через отверстия 25, 26 металлизированными дорожками электрически соединены с контактными площадками 27, 28 на внешней стороне пластины (каждый электрод соединен только с одной соответствующей площадкой). Эти два электрода 23, 24 совместно со ступицей 17 как с общим электродом образуют одновременно и дифференциальный емкостной датчик угла поворота рамки 18 вокруг оси Z, и электростатический датчик момента сил. На внешней стороне каждой пластины 15, 16 по ее периметру металлизацией выполнена плоская катушка 5. Количество витков катушки выбирается из конструктивных и технологических возможностей и обычно их достаточно не более десяти. Катушки 5 обеих пластин 15, 16 включены последовательно, для чего их концы 29 соединены внешним проводником.
Вибрационный гироскоп работает следующим образом. При подаче тока от сервисной электроники в катушки с частотой, равной собственной частоте подвеса пакета 1, что может быть осуществлено известными способами, как в режиме вынужденных колебаний, так и в режиме автоколебаний, пакет 1 под действием момента сил Лоренца начинает совершать резонансные угловые колебания вокруг оси Y. При наличии вращения корпуса гироскопа вокруг оси Х с угловой скоростью Ω под действием сил Кориолиса возникают колебания рамки 18 вокруг оси Z. Амплитуда колебаний рамки, пропорциональная угловой скорости Ω, регистрируется двумя дифференциальными емкостными датчиками угла поворота рамки. Для повышения чувствительности гироскопа собственная частота рамки настраивается равной собственной частоте пакета.
Конструктивное выполнение вибрационного гироскопа в соответствии с настоящим изобретением позволяет повысить точность измерения угловой скорости за счет снижения взаимного влияния колебаний двустепенной колебательной системы по осям колебаний, а также снижает влияние системы возбуждения на систему измерения и повышает чувствительность прибора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ И ВИБРАЦИОННЫЙ ГИРОСКОП ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334197C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2008 |
|
RU2364836C1 |
| СПОСОБ СБОРКИ ГИРОСКОПОВ И ВИБРАЦИОННЫЙ ГИРОСКОП | 2007 |
|
RU2334946C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2004 |
|
RU2248524C1 |
| МАЛОГАБАРИТНЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2178523C2 |
| АКСЕЛЕРОМЕТР | 2006 |
|
RU2307359C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПО КРЕНУ ИНЕРЦИАЛЬНОЙ ПЛАТФОРМЫ ДЛЯ БЫСТРОВРАЩАЮЩИХСЯ ОБЪЕКТОВ И СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ ИНЕРЦИАЛЬНАЯ ПЛАТФОРМА | 2003 |
|
RU2256882C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРИЕНТАЦИИ И НАВИГАЦИИ И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ БЫСТРОВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 2003 |
|
RU2256881C2 |
| СПОСОБ ИЗМЕРЕНИЯ СИЛЫ ТЯГИ РЕАКТИВНОГО ДВИГАТЕЛЯ И СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2221995C2 |
| АКСЕЛЕРОМЕТР | 1989 |
|
RU2046348C1 |
Изобретение относится к измерительной технике, в частности к вибрационным гироскопическим приборам, предназначенным для измерения угловой скорости. Вибрационный гироскоп для измерения угловой скорости содержит корпус, а также выполненный из единой пластины монокристалла кремния роторный узел из упругосвязанных между собой ротора и ступицы, упругий подвес, соединяющий ступицу с корпусом, изоляционные пластины с электродами и четное число магнитных систем, представляющих собой каждая подковообразный магнитопровод с плоскими постоянными магнитами на концах, между которыми образован плоский зазор. Ступица выполнена в виде прямоугольной пластины с базирующими платиками, расположенными по ее углам и в центре симметрично с двух сторон, ротор - в виде рамки, охватывающей ступицу с зазором по периметру и связанной с ней двумя упругими плоскими перемычками, расположенными симметрично с двух сторон ступицы, а на базирующие платики ступицы установлены симметрично с двух сторон с зазором относительно рамки прямоугольные изоляционные пластины, контур которых совпадает с контуром рамки. В каждой изоляционной пластине металлизацией на внутренней стороне напротив рамки образованы два электрода, на внешней стороне по ее периметру - плоская катушка. Ступица и изоляционные пластины связаны с корпусом упругим подвесом, ось которого перпендикулярна плоскости пластин и проходит через общий центр масс роторного узла и изоляционных пластин. Участки катушек на изоляционных пластинах размещены в магнитном поле зазора каждой магнитной системы, а электроды, катушки на изоляционных пластинах и ступица снабжены для связи с сервоэлектроникой упругими токоподводами. Техническим результатом является повышение точности измерения угловой скорости за счет снижения взаимного влияния колебаний двустепенной колебательной системы по осям колебаний, а также снижение влияния системы возбуждения на систему измерения и повышение чувствительности прибора. 5 з.п. ф-лы, 6 ил.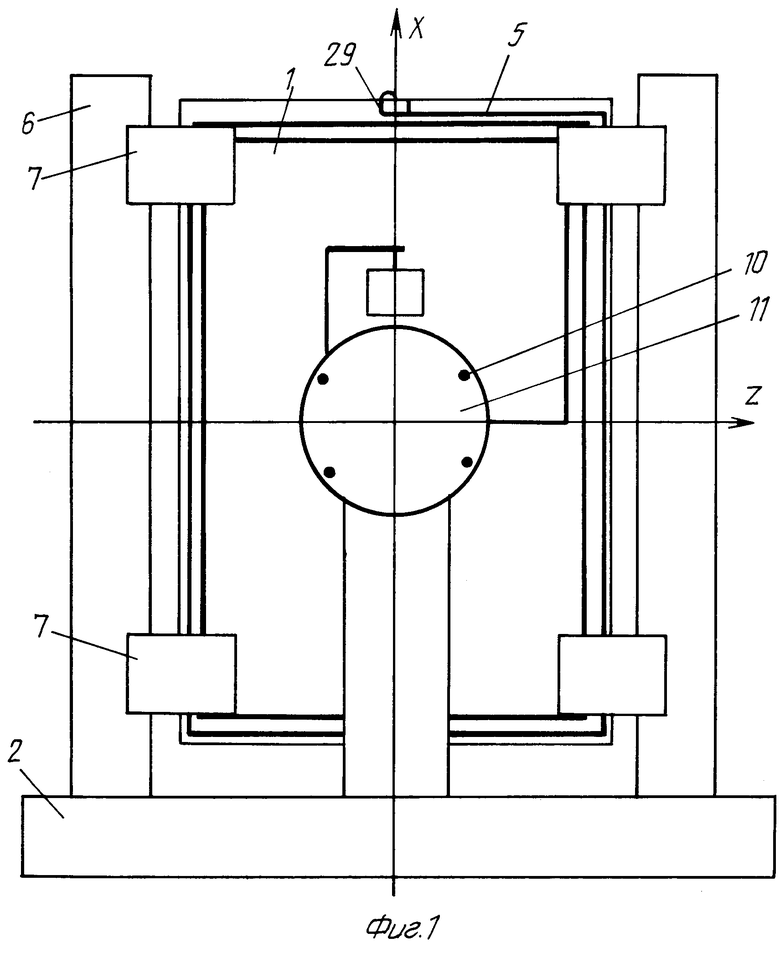
| US 5555765 А, 17.09.1996 | |||
| US 5392650 А, 28.02.1995 | |||
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 1996 |
|
RU2110768C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 1993 |
|
RU2098761C1 |
| Водонагреватель-аккумулятор | 1931 |
|
SU23974A1 |
| Горелка | 1978 |
|
SU877226A1 |

