Предлагаемые изобретения относятся к измерительной технике, в частности к вибрационным гироскопическим приборам, предназначенным для измерения угловой скорости.
Известен гироскоп-акселерометр, который состоит из одной кремневой и двух стеклянных пластин. В кремневой пластине путем травления сформированы базовая рамка и два маятниковых узла, которые связаны с рамкой с помощью упругих перемычек. Маятники могут упруго перемещаться вдоль оси, нормальной плоскости пластины (патент США №5392650, класс 73/517 А, 1995 г.).
Система возбуждения может вызывать колебания маятниковых узлов в противофазе в плоскости пластины, что, по сути, эквивалентно вращению всей пластины вокруг оси, перпендикулярной ее плоскости. При наличии вращения основания, на котором установлен акселерометр-гироскоп, его маятники под действием сил Кориолиса начнут совершать колебания с частотой возбуждения. Амплитуды колебаний маятников зависят от угловой скорости поворота прибора (здесь не рассматриваются смещения маятников, обусловленные движением прибора с ускорением).
На базовую рамку кремниевой пластины с двух сторон жестко закреплены две стеклянные пластины с электродами, которые совместно с кремниевой пластиной, как общим электродом, образуют пару дифференциальных емкостных датчиков смещения маятников.
Основными недостатками рассмотренного акселерометра-гироскопа являются, во-первых, невозможность изготовления кремниевой пластины с идентичными маятниковыми узлами, что приводит к дополнительной погрешности прибора, и, во-вторых, в данной конструкции достаточно сложно осуществить режим резонансной настройки колебаний маятников и маятниковых узлов.
Известен вибрационный гироскоп, который имеет корпус с установленным в нем узлом вибрирующего кольца, называемым также роторным узлом.
Роторный узел выполнен из единой пластины монокристалла кремния и состоит из ротора в виде внешнего кольца и внутренней ступицы, которые связаны друг с другом упругими элементами. Ступица соединена с корпусом также упругими связями. При этом ротор может совершать угловые колебания вокруг двух взаимно ортогональных осей (вокруг оси, нормальной плоскости кольца, и оси, расположенной в плоскости кольца).
В гироскопе электростатически могут быть возбуждены угловые колебания ротора вокруг оси, нормальной его плоскости (оси возбуждения). При наличии вращения корпуса гироскопа под действием сил Кориолиса его ротор начинает совершать колебания вокруг второй оси (выходной оси) с амплитудой, которая пропорциональна угловой скорости поворота.
На корпусе гироскопа образована диэлектрическая подложка (изоляционный слой), на которой имеется два электрода. Электроды совместно с кремниевым ротором (как общим электродом) образуют дифференциальный емкостный датчик смещения ротора (патент США №5555765, класс 73/504.09, 1996).
К недостаткам данного гироскопа следует отнести следующее:
1. Ротор гироскопа связан с корпусом упругим кардановом подвесом, который позволяет совершать ротору угловые колебания вокруг двух взаимно ортогональных осей. Реализация совершенного упругого подвеса такого типа достаточна сложна.
2. Электроды дифференциального датчика смещения ротора и электроды электростатического возбуждения ротора имеют друг с другом емкостную связь, что приводит к влиянию системы возбуждения на систему измерения и, соответственно, к ошибкам гироскопа.
3. В данной конструкции гироскопа трудно осуществить возбуждение ротора с достаточно большой амплитудой, что ограничивает достижения высокой чувствительности прибора.
Известен также вибрационный гироскоп, который имеет в своем составе узел, состоящий из трех пластин: кремниевой и двух изоляционных. В кремниевой пластине методами химического травления образована рамка и ступица, связанные друг с другом упругими торсионами. На ступице жестко закреплены с двух сторон изоляционные пластины, на которые нанесены металлизацией электроды, образующие совместно с кремниевой рамкой (как общим электродом) емкостные датчики смещения и электростатические датчики силы. Так как рамка относительно изоляционных пластин расположена с зазором, она может совершать угловые колебания вокруг одной оси (оси упругих торсионов). Колебания вокруг второй ортогональной оси рамка совершает совместно со всем узлом на упругой оси, перпендикулярной плоскости пластин (Патент Российской Федерации №2219495, G01С 19/56, G01Р 9/04, 2002).
В этом гироскопе реализован способ измерения угловой скорости, заключающийся в том, что от электронной схемы питания сервисной электроники подают ток с резонансной частотой, вызывающий возбуждение под действием момента сил Лоренца колебаний инерционной массы упругой измерительной системы в плоскости, совпадающей с осью измерения угловой скорости, после чего измеряют амплитуды колебаний инерционной массы в плоскости, ортогональной первой плоскости, возникающие под действием сил Кориолиса при угловой скорости относительно измерительной оси, не равной нулю.
Указанный способ и реализующий его вибрационный гироскоп наиболее близки к предлагаемому изобретению и поэтому приняты за прототип.
Необходимо отметить следующие недостатки прототипа:
1. Наличие упругих токоподводов для передачи сигналов с элементов гироскопа, движущихся с достаточно большой амплитудой, на неподвижные элементы приводит к снижению надежности и ресурса прибора.
2. Конструкция прибора относится к гибридному типу. Полный цикл его изготовления требует применения достаточно разнородных технологий, что повышает себестоимость производства прибора.
3. Относительная сложность выполнения магнитной системы, требующей, по меньшей мере, двух систем магнитопроводов.
Техническим результатом настоящего изобретения является повышение надежности и ресурса вибрационного гироскопа при одновременном уменьшении его габаритов, упрощении конструкции и снижении его стоимости за счет исключения навесных упругих токоподводов, упрощения упругого подвеса и магнитной системы, а также существенного повышения в процессе изготовления прибора доли микроэлектронных (планарных) технологий.
Указанный технический результат достигается тем, что в способе измерения угловой скорости, включающем возбуждение под действием момента сил Лоренца колебаний инерционной массы упругой измерительной системы в первой плоскости, совпадающей с осью измерения угловой скорости, и измерение амплитуды колебаний инерционной массы во второй плоскости, ортогональной первой плоскости, под действием сил Кориолиса, возбуждают резонансные поступательные колебания инерционной массы упругой измерительной системы вдоль оси возбуждения, расположенной в первой плоскости и перпендикулярной оси измерения угловой скорости, а о величине угловой скорости относительно оси измерения угловой скорости судят по величине амплитуды угловых колебаний инерционной массы под действием сил Кориолиса относительно выходной оси, расположенной в первой плоскости параллельно оси возбуждения.
Указанный технический результат в вибрационном гироскопе, содержащем корпус, а также выполненный из единой пластины инерционный узел, упруго связанный с корпусом, изоляционные пластины с электродами и магнитную систему, достигается тем, что инерционный узел выполнен в виде жесткой П-образной рамки, концы которой связаны двумя плоскими пружинами с маятником в виде балки, параллельной средней перекладине рамки, и ступицы, связанной с концами рамки двумя торсионами, при этом на балке, плоских пружинах, концах рамки и торсионах нанесен через изоляционный слой от их поверхностей общий проводник с выводными контактными площадками на ступице, имеющей выполненные симметрично с двух ее сторон базирующие платики, на которые установлены с зазором относительно рамки две изоляционные пластины, контур которых перекрывает среднюю перекладину рамки, при этом в каждой изоляционной пластине металлизацией на внутренней стороне напротив рамки образован электрод, одна из изоляционных пластин жестко связана с корпусом, на котором размещена магнитная система в виде П-образного магнитопровода с двумя плоскими магнитами на концах и установленного с зазорами относительно этих магнитов магнитопровода в виде бруса, причем концы плоских пружин с частью общего проводника на балке маятника инерционного узла расположены в зазорах магнитной системы.
Кроме того, геометрическая ось поворота рамки на торсионах может быть перпендикулярна боковым перекладинам П-образной рамки и проходить через геометрический центр масс инерционного узла, а плоскости пружин могут быть перпендикулярны плоскости рамки и совпадать с продольными осями ее боковых перекладин.
Кроме того, на внешней стороне, по меньшей мере, одной из изоляционных пластин может быть напылен, по меньшей мере, один резистор.
Предлагаемое изобретение поясняется чертежами.
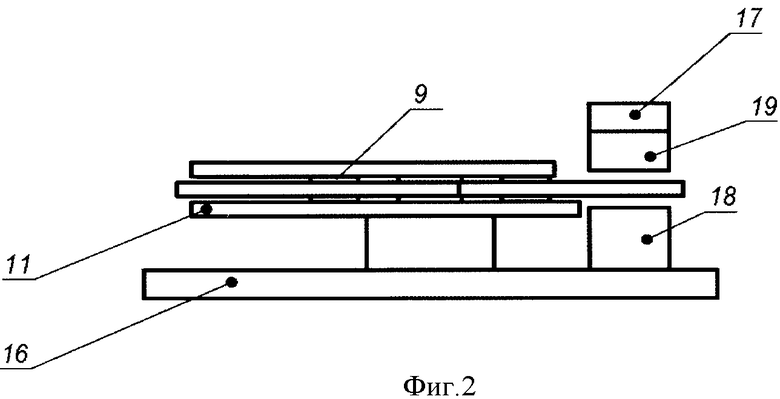
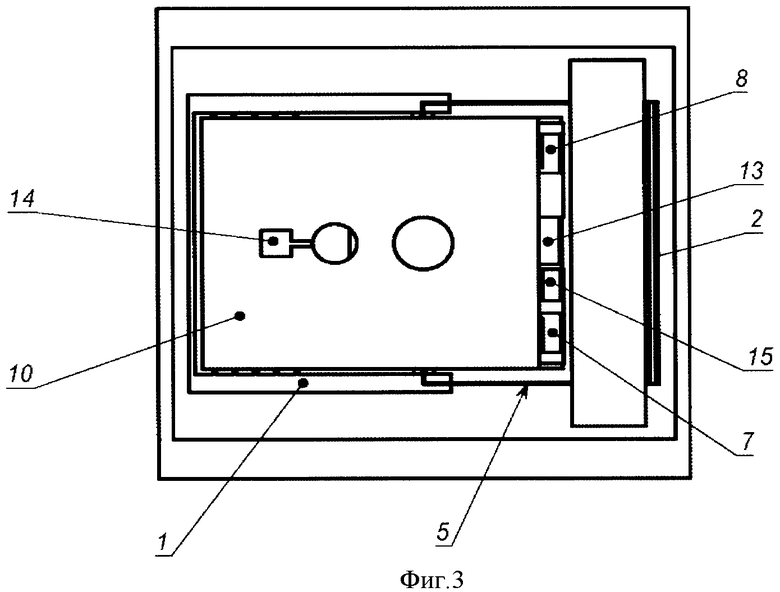
На фиг.1 показан вибрационный гироскоп до соединения пластин друг с другом и всего пакета с корпусом, на фиг.2 и 3 - показан вибрационный гироскоп в собранном виде сбоку и сверху (здесь не показаны элементы крепления магнитопровода с магнитами к корпусу).
Ключевым звеном вибрационного гироскопа является маятниковый узел, который выполняется из единой пластины монокристалла кремния травлением и состоит из П-образной жесткой рамки 1, маятника 2, ступицы 3 и упругих элементов 4, 5. Концы рамки 1 связаны парой упругих торсионов 4 со ступицей 3, а парой упругих плоских пружин 5 - с маятником 2. Торсионы 4 позволяют поворачиваться узлу (рамка 1, маятник 2 и пружины 5) вокруг оси X, перпендикулярной боковым перекладинам рамки и проходящей через центр масс всего подвижного узла. Пружины 5 являются продолжением боковых перекладин рамки 1, а плоскости пружин 5 перпендикулярны плоскости рамки. Это позволяет маятнику 2 в виде балки совершать поступательные колебания вдоль оси, параллельной оси X. В средней перекладине рамки 1 образованы сквозные продольные прорези. Наличие прорезей позволяет существенно снизить демпфирование колебаний на торсионах 4. На маятниковом узле через изоляционный слой нанесен проводник 6, начало и конец (контактные площадки 7 и 8) которого размещается на ступице 3. Проводник 6 проходит по поверхности торсионов 4, рамки 1, пружин 5 и маятника 2.
На ступице 3 симметрично с двух сторон выполнены базирующие платики 9, на которые жестко устанавливаются две прямоугольные изоляционные пластины 10 и 11 таким образом, что между пластинами и рамкой 1 образуется зазор (порядка десятка микрон), а контур пластин перекрывает только среднюю перекладину рамки 1. На внутренней стороне каждой из изоляционных пластин 10, 11 напротив средней перекладины рамки 1 нанесен металлизацией электрод 12, который электрически связан с контактной площадкой 13 для нижней пластины и аналогичный электрод на верхней пластине - с площадкой 14. Со всем маятниковым узлом электрически связана контактная площадка 15. Нижняя изоляционная пластина 12 жестко соединена с корпусом 16 гироскопа. При этом все контактные площадки располагаются на неподвижных относительно корпуса 16 элементах, что позволяет легко осуществить электрическое соединение прибора с внешними электронными устройствами.
На корпусе 16 размещена магнитная система, представляющая собой два магнитопровода 17 и 18 в виде брусков каждый. На одном 17 из них закреплены два плоских магнита 19, образуя с ним П-образный магнитопровод. Магнитная система размещена на корпусе так, что между магнитами 19 и магнитопроводом 18 образуются два плоских зазора, в которых располагаются пружины 5 с проводником 6.
На поверхности одной из изоляционных пластин может быть нанесен резистор (проводник с произвольным рисунком), предназначенный для использования в качестве либо термосопротивления, либо балансировочного резистора при включении основного проводника 6 в мостовую схему. На чертежах резистор не показан.
Такое конструктивное исполнение подвеса пакета гироскопа позволяет повысить надежность прибора, а также существенно улучшить его технологичность и, соответственно, уменьшить стоимость.
Вибрационный гироскоп работает следующим образом. При подаче тока от сервисной электроники в проводник 6 через контактные площадки 7, 8 с частотой, равной собственной частоте колебаний маятника 2 на пружинах 5, что может быть осуществлено известными способами как в режиме вынужденных колебаний, так и в режиме автоколебаний, маятник 2 под действием момента сил Лоренца начинает совершать резонансные поступательные колебания вдоль оси, параллельной оси X. При наличии вращения корпуса гироскопа вокруг оси Y с угловой скоростью О под действием сил Кориолиса возникают угловые колебания узла, состоящего из рамки 1, маятника 2 и пружин 5, вокруг оси X. Амплитуда колебаний узла и, соответственно, рамки 1, пропорциональная угловой скорости Ω, регистрируется двумя дифференциальными емкостными датчиками угла поворота рамки, образованными двумя электродами 12 на изоляционных пластинах 10, 11 и рамкой 1. Емкостные датчики связаны с внешней сервоэлектроникой через контактные площадки 13, 14, 15. Для повышения чувствительности гироскопа собственная частота узла с рамкой настраивается равной собственной частоте колебаний маятника.
Предлагаемые способ измерения угловой скорости и конструктивное выполнение вибрационного гироскопа для измерения угловой скорости в соответствии с настоящим изобретением позволяют повысить надежность и ресурс вибрационного гироскопа при одновременном уменьшении его габаритов, упрощении конструкции и снижении его стоимости за счет исключения навесных упругих токоподводов, упрощения упругого подвеса и магнитной системы, а также существенного повышения в процессе изготовления прибора доли микроэлектронных (планарных) технологий.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СБОРКИ ГИРОСКОПОВ И ВИБРАЦИОННЫЙ ГИРОСКОП | 2007 |
|
RU2334946C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2008 |
|
RU2364836C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2002 |
|
RU2219495C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2015 |
|
RU2577553C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2012 |
|
RU2503924C1 |
| ДАТЧИК ИНЕРЦИАЛЬНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2119645C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 1993 |
|
RU2064682C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2010 |
|
RU2485444C2 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОСИСТЕМНОГО ГИРОСКОПА | 2014 |
|
RU2556334C1 |
| ИНЕРЦИАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2003 |
|
RU2243569C1 |
Изобретения относятся к измерительной технике, в частности к вибрационным гироскопическим приборам, предназначенным для измерения угловой скорости. Способзаключается в возбуждении поступательных колебаний балки, которая является частью рамки, вдоль некоторой оси, при этом об угловой скорости вращения судят по результатам измерения параметров угловых колебаний рамки вокруг оси, параллельной первой. Инерционный узел вибрационного гироскопа выполнен в виде жесткой П-образной рамки, концы которой связаны двумя плоскими пружинами с маятником в виде балки, параллельной средней перекладине рамки, и ступицы, связанной с концами рамки двумя торсионами. Техническим результатом является повышение надежности и ресурса вибрационного гироскопа при одновременном уменьшении его габаритов, упрощении конструкции и снижении его стоимости за счет исключения навесных упругих токоподводов, упрощения упругого подвеса и магнитной системы. 2н. и 2 з.п. ф-лы, 3ил.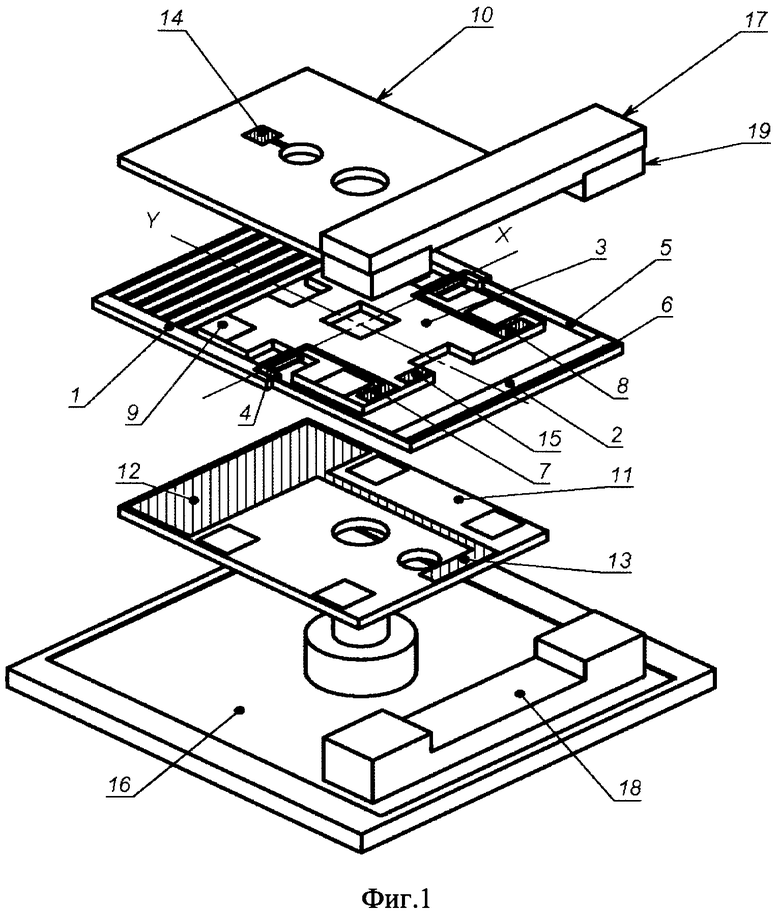
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2002 |
|
RU2219495C1 |
| US 5945599 А, 31.08.1999 | |||
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2002 |
|
RU2222780C1 |
| US 5392650 А, 28.02.1995 | |||
| ВИБРАЦИОННЫЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ | 1996 |
|
RU2104557C1 |
| JP 8184448 А, 16.07.1996. | |||

