Изобретение относится к нефтегазовой промышленности и к геофизике, а более конкретно - к устройствам, позволяющим измерять значения азимутального и зенитного углов при исследовании траекторий нефтяных, газовых, геофизических и других скважин.
Известен гироскопический инклинометр (патент США N 4.244.116, кл. 6010 19/38, 1981 г. ), в котором в качестве чувствительных элементов для измерения азимутального и зенитного углов используются соответственно двухосный динамически настраиваемый гироскоп и двухосный маятниковый акселерометр.
Известен также гироскопический инклинометр (патент США N 4.245.498, кл. E 21 В 47/022, 1981 г. ), в котором в качестве чувствительных элементов для измерения азимута используются динамически настраиваемые гироскопы, которые при проведении измерений поворачиваются вокруг оси подвеса рамки с помощью датчика момента. Однако такая схема не может быть реализована в малогабаритном инклинометре ввиду того, что отсутствуют компактные датчики момента, обеспечивающие требуемый момент поворота.
Целью настоящего изобретения является создание малогабаритного гироскопического инклинометра с внешним диаметром не более 36 мм, обеспечивающего требуемую точность измерений параметров траектории скважины.
Цель достигается тем, что в инклинометре применен малогабаритный и маломоментный электродвигатель постоянного тока с редуктором специальной конструкции.
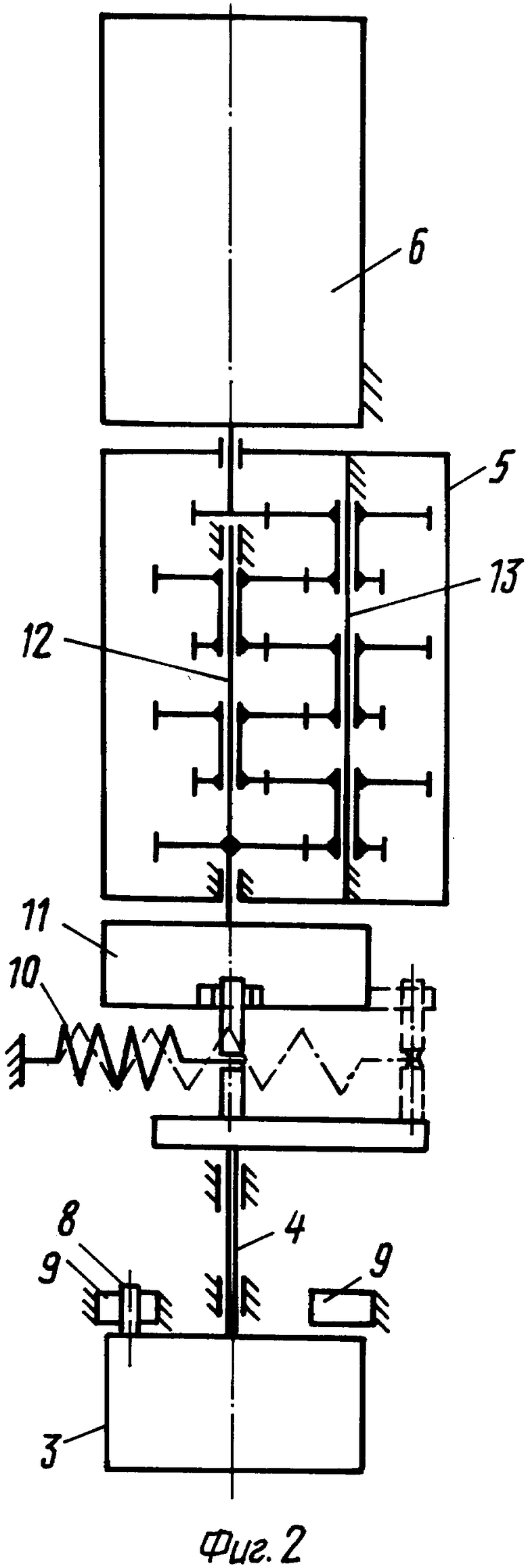
Малогабаритный гироскопический инклинометр в соответствии с настоящим изобретением (фиг. 1) содержит два основных блока: блок чувствительных элементов 1 и блок электроники 2. В состав блока входят приборы измерения азимута и зенитного угла. Для измерения азимута применен динамически настраиваемый гироскоп 3, который присоединен к валу 4 и имеет возможность поворачиваться на 180o вокруг оси инклинометра. Вал 4 кинематически соединен с выходным звеном редуктора 5, на входе которого установлен двигатель постоянного тока 6. Реверсирование вращения двигателя осуществляется с помощью двух микропереключателей 7. Стабильность крайних положений поворота гироскопа (0 и 180o) обеспечивается за счет взаимодействия упора 8 с базовыми площадками 9 на корпусе блока чувствительных элементов, которые прижимаются друг к другу пружиной 10. Фрикционная муфта 11 защищает от разрушающих нагрузок в момент прижатия упора 8 к одной из базовых площадок 9. Редуктор 5, кинематическая схема которого показана на фиг. 2, имеет шесть пар цилиндрических зубчатых колес, вращающихся на валу 12 и оси 13. Такая конструкция редуктора обеспечивает его малый диаметр.
Два маятниковых акселерометра 14, используемые для измерения зенитного угла, установлены неподвижно в корпусе блока 1.
Измерительные оси акселерометров взаимно перпендикулярны, а направление их совпадает с направлением измерительных осей гироскопа, когда он находится в позициях 0 и 180o, т. е. в моменты прижатия упора 8 к базовым площадкам 9.
Блок электроники 2 осуществляет электропитание чувствительных элементов 3 и 14, а также обработку и передачу информации по каротажному однокильному кабелю 15 и наземной аппаратуре.
Все элементы инклинометра помещены в прочную трубчатую герметичную оболочку 16. Для защиты аппаратуры от ударов и вибрации при движении внутри скважины предусмотрены амортизатор 17 и виброгасители 18.
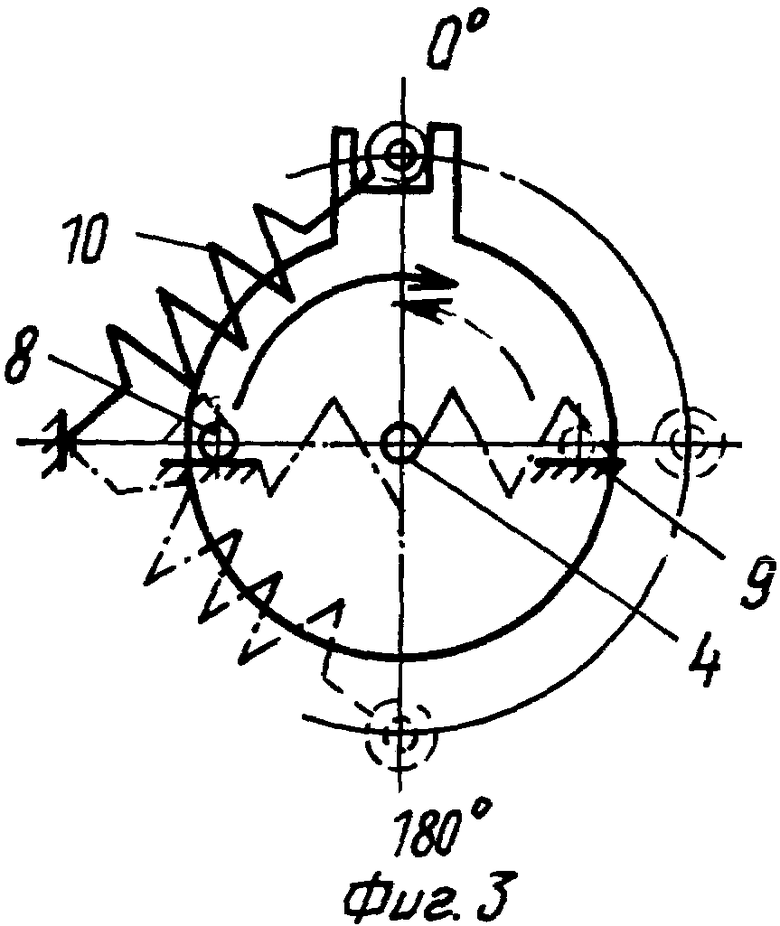
Измерение параметров траектории скважины - азимута и зенитного угла - производится следующим образом. Инклинометр опускается в заданную точку скважины, где производится измерение выходных сигналов акселерометра и выходных сигналов гироскопа в позициях 0 и 180o. Для получения большей точности измерений необходимо обеспечить очень точный поворот на 180o. Для этого в позиции 0o (фиг. 3) упор 8 прижимается к одной из базовых площадок 9 посредством пружины 10. При включении двигателя 6 гироскоп 3 поворачивается по часовой стрелке в позицию 180o, и упор 8 той же пружиной 10 прижимается к другой базовой площадке 9. По полученным измерениям наземная аппаратура производит вычисление азимута и зенитного угла в данной точке скважины. После этого гироскоп возвращается в позицию 0o, и инклинометр перемещается в следующую точку скважины.
Таким образом, заявленные технические решения существенно расширяют эксплуатационные возможности инклинометра, так как позволяют использовать его в скважинах малого диаметра при обеспечении требуемой точности измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ ПО АЗИМУТУ И ДВУХРЕЖИМНЫЙ БЕСПЛАТФОРМЕННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269001C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2002 |
|
RU2219495C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| ГИРОСКОПИЧЕСКАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН | 1996 |
|
RU2109137C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1995 |
|
RU2095563C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРИЕНТАЦИИ И НАВИГАЦИИ И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ БЫСТРОВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 2003 |
|
RU2256881C2 |
| ГИРОСКОПИЧЕСКАЯ ИНКЛИНОМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ ПАРАМЕТРОВ БУРЕНИЯ | 1997 |
|
RU2128821C1 |
| КОМПЛЕКС ИНКЛИНОМЕТРИЧЕСКОЙ СКВАЖИННОЙ АППАРАТУРЫ И СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СКВАЖИН | 2000 |
|
RU2193654C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
Изобретение предназначено для использования в нефтегазовой промышленности и геофизике при исследовании траекторий скважин малого диаметра. Инклинометр содержит гироскоп, два маятниковых акселерометра, блок электроники для питания чувствительных элементов и передачи информации на наземную аппаратуру, прочную герметичную оболочку, систему виброгасителей и амортизаторов. Для механической и электрической связи с наземной аппаратурой используется каротажный кабель. Реверсивное вращение гироскопа на 180o в процессе измерений осуществляется двигателем постоянного тока через многоступенчатый редуктор, имеющий только один вал и одну ось, а стабильность ориентации гироскопа при измерениях обеспечивается за счет прижатия упора к базовым плоскостям с помощью одной пружины в обеих позициях, что позволяет использовать инклинометр в скважинах малого диаметра. 3 ил.
Малогабаритный гироскопический инклинометр для измерения азимута и зенитного угла осевой линии наклонно направленных скважин в заданных точках по всей их длине, состоящий из блока чувствительных элементов с двумя маятниковыми акселерометрами и гироскопом, имеющим возможность реверсивного разворота на 180o вокруг продольной оси инклинометра, блока электроники для питания гироскопа и акселерометров, обработки и передачи измерительной информации на наземную аппаратуру, прочной герметичной оболочки, системы виброгасителей и амортизаторов, каротажного кабеля для электрической и механической связи с наземной аппаратурой, отличающийся тем, что разворот гироскопа в процессе измерений осуществляется малогабаритным электродвигателем постоянного тока через многоступенчатый редуктор, имеющий только один вал и одну ось, а стабильность ориентации гироскопа в позициях 0o и 180o обеспечивается за счет прижатия упора к базовым плоскостям посредством одной пружины в обеих позициях.
| US 4245498, 20.01.1981 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА СКВАЖИНЫ В ПОСЛЕДОВАТЕЛЬНЫХ ТОЧКАХ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1991 |
|
RU2030574C1 |
| Поворотная платформа для калибровки датчиков угловых скоростей | 1975 |
|
SU525891A1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1995 |
|
RU2095563C1 |

