Предлагаемое изобретение относится к области машиностроения, а именно к прецизионным позиционирующим средствам, и может быть широко использовано, например, в прецизионных станках, высокоточных копирующих устройствах и иных областях техники преимущественно для обеспечения дискретности (шага) позиционирования объекта в нанометровом диапазоне.
В настоящее время существуют различного рода микропозиционирующие устройства, в основном, основанные на использовании прецизионных линейных двигателей (разработки фирм ASM Lithography, Canon, Nikon, Планар) или пьезокерамических актюаторов (разработки фирм Burleigh, Toshiba, Physik Instmmente).
Микропозиционеры первой группы позволяют достигнуть контролируемой точности позиционирования 35 нм, а микропозиционеры второй группы - 10 нм.
Недостатками обеих групп устройств являются:
- достигнута предельная точность позиционирования,
- повышение точности пьезокерамических позиционеров требует радикального улучшения уровня стабилизации используемого высокого напряжения питания и устранения микродефектов в пьезокерамике, получаемой спеканием,
- невысокий диапазон перемещения и развиваемых при перемещении усилий.
Известно нанометрическое позиционирующее устройство, включающее неподвижный базовый элемент, на котором установлены с возможностью возвратно-поступательного перемещения относительно базового элемента и одна относительно другой ступени грубого и точного позиционирования объекта, при этом ступень грубого позиционирования кинематически связана с базовым элементом и ступенью точного позиционирования с возможностью обеспечения синхронного перемещения обеих ступеней относительно базового элемента в процессе грубого позиционирования объекта, а кинематическая связь упомянутых ступеней между собой осуществлена с возможностью автономного перемещения подвижного элемента ступени точного позиционирования относительно ступени грубого позиционирования и соответственно базового элемента в процессе точного позиционирования объекта (RU 20163 по кл. G01B 3/18, 2001 г.).
Известное устройство обладает ограниченными эксплуатационными возможностями ввиду того, имеет ограниченный диапазон перемещения объекта при заданной точности перемещения (дискретностью шага перемещения) невысокую практическую точность ввиду низкой механической жесткости первой ступени.
Наиболее близким по технической сущности к предлагаемому решению является устройство перемещения объекта рейсмусового станка, включающее направляющую, установленный на ней первый элемент с приводом его линейного перемещения, второй элемент, установленный на второй направляющей, ортогональной первой, причем элементы имеют возможность взаимного перемещения вдоль оси, расположенной под острым углом к оси одной из направляющих и лежащей в плоскости, ортоганальной оси второй направляющей (патент RU 2201335 по кл. В27С 1/04, 2001).
Недостатками известной конструкции являются:
- невысокая точность позиционирования, обусловленная механическим контактом в скользящих поверхностях клиньев и микроскачками, вызванными эффектами трения твердых поверхностей;
- наличие механического гистерезиса, который приводит к реверсу (потеря координат при реверсе).
Задачей, решаемой предлагаемым изобретением, является создание устройства перемещения объекта, позволяющего позиционировать объект с нанометрической точностью, т.е обеспечивать шаг (дискретность) позиционирования перемещаемого объекта на заданное расстояние в нанометровом диапазоне, а также иметь высокую жесткость привода в направлении отрабатываемой координаты.
Технический результат в предлагаемом изобретении достигают созданием устройства перемещения объекта, включающего направляющую, установленный на ней первый элемент с приводом его линейного перемещения, второй элемент, установленный на второй направляющей, ортогональной первой, причем элементы имеют возможность взаимного перемещения вдоль оси, расположенной под острым углом к оси одной из направляющих и лежащей в плоскости ортоганальной оси второй направляющей, в котором согласно изобретению обе направляющие выполнены аэростатическими, а первый и второй элементы размещены на каретках, которые имеют возможность перемещения по соответствующим направляющим, при этом элементы установлены каждый на своей каретке с возможностью поворота относительно оси перемещения каретки на один и тот же угол, причем элементы разделены между собой зазорами, форма сечения которых плоскостью, перпендикулярной оси перемещения, постоянная, и предназначенными для формирования аэростатического зазора, элементы снабжены дросселями, и устройство снабжено внешним источником сжатой текучей среды, который сообщен с дросселями элементов и направляющих.
В зависимости от уровня требуемого разрешения привод линейного перемещения выполнен в виде или бесконтактной магнитной передачи, или механической передачи, или линейного двигателя.
Использование:
- бесконтактной магнитной передачи позволяет создавать исключительно высокое разрешение при умеренной скорости перемещения;
- механической передачи позволяет создавать умеренное разрешение при средней скорости перемещения, иметь малую зависимость от реверса, простота конструкции - линейного двигателя - наивысшая скорость перемещения, высокое разрешение.
Предлагаемое устройство занимает техническую нишу силовых приводов с относительно небольшими ходами, которая занята пьезо- и магнитострикционными приводами. При сравнимых габаритах он имеет жесткость вдоль продольной направляющей, соизмеримую с жесткостью пьезо- или магнитострикционного приводов, причем типичная величина хода предлагаемого привода примерно в 10-20 раз больше.
Кроме того, предлагаемое устройство свободно от основного недостатка пьезо- и магнитострикционных приводов, состоящего в том, что они теряют номинальную координату при перемене направления движения (реверсе).
Сущность предлагаемого изобретения поясняется нижеследующим описанием конструкции устройства перемещения объекта и чертежом, где показана схема предлагаемого устройства перемещения объекта.
Устройство перемещения объекта включает направляющую 1, установленный на ней первый элемент 2 с приводом его линейного перемещения 3, второй элемент 4, установленный на второй направляющей 5, ортогональной первой, и внешний источник сжатой текучей среды 12.
Первый 2 и второй 4 элементы размещены на каретках 6 и 7, которые имеют возможность перемещения по соответствующим направляющим 1 и 5 и имеют возможность взаимного перемещения вдоль оси, расположенной под острым углом к оси одной из направляющих и лежащей в плоскости, ортоганальной оси второй направляющей. Направляющие 1 и 5 выполнены аэростатическими. Элементы 2 и 4 установлены каждый на своей каретке 6 и 7 с возможностью поворота относительно оси перемещения каретки на один и тот же угол, причем элементы разделены между собой зазорами 8 (на черт. не показ), форма сечения которых в плоскости, перпендикулярной оси перемещения, постоянная, и предназначенными для формирования аэростатического зазора.
Аэростатический зазор позволяет создать режим бесконтактного перемещения всех подвижных элементов, что полностью ликвидирует механический гистерезис и, как следствие, полностью исключено влияние реверса на точность отработки координаты.
Элементы 2 и 4 и направляющие 1 и 5 снабжены дросселями 9, 10 и 11.
Внешний источник сжатой текучей среды 12 при помощи трубопровода 13 сообщается с дросселями 9, 10 и 11 элементов и направляющих.
Привод линейного перемещения 3 может быть выполнен в виде или бесконтактной магнитной передачи, или механической передачи, или линейного двигателя. Тип привода выбирают в зависимости от технических требований, предъявляемых к предлагаемому устройству.
Предлагаемое устройство перемещения объекта работает следующим образом.
Линейный координатный привод 3 перемещает продольную каретку 6 по направляющей 1, причем вместе с кареткой 6 перемещается закрепленный на ней элемент 2, ось которого развернута относительно оси направляющей 1 под некоторым небольшим углом α.
В зазоры 8 между продольной кареткой 6 и продольной направляющей 1, между поперечной кареткой 7 и поперечной направляющей 2, от внешнего источника сжатой текучей среды 12, например компрессора, подают сжатый газ.
Таким образом, все подвижные элементы устройства перемещаются на слое бесконтактной газовой смазки.
Разворот элемента 2 относительно оси перемещения продольной каретки 6 и разворот на тот же угол элемента 4 относительно оси поперечной каретки 7 можно контролировать угломерным устройством 13, в качестве которого может быть использован либо нониусный лимб, либо датчик угла, причем угловое положение элементов 2 и 4 фиксируют зажимами 14 и 15 соответственно.
При перемещении продольной каретки 6 на некоторое расстояние X поперечная каретка 7 передвинется на расстояние У=Х×tg(α), где α - угол разворота оси элемента 2 относительно оси перемещения продольной каретки 6. Безразмерная величина k, равная ctg(α), является коэффициентом демультипликации.
Типичные величины этого коэффициента колеблются примерно от 20 до 100.
Опытный образец предлагаемого устройства перемещения объекта был опробован на асферическом токарном станке.
На поперечную каретку 7 был закреплен элемент 4, в качестве которого был использован исполнительный орган привода, например резцедержатель с резцом.
Высокий коэффициент демультипликации позволяет получать высокое разрешение поперечного движения при достаточно грубом разрешении линейного привода 3.
Так, например, привод асферизатора токарного станка для изготовления асферической оптики имеет коэффициент демультипликации, равный 50, что обеспечивает поперечной каретке 7 разрешение в 1 нм при разрешении линейного привода в 50 нм.
Жесткость, с которой поддерживается номинальная координата У, значительно превосходит жесткость привода по координате Х и лимитируется жесткостью слоя аэростатической смазки между элементами 2 и 4.
Люфт связи между элементами 2 и 4 при реверсе направления движения при безлюфтовом приводе 3 строго равен нулю.
При коэффициентах демультипликации порядка 100 силовые параметры демультипликатора на поперечной координате У сравнимы с таковыми физических приводов пьезо- и магнитострикционных, однако максимальное перемещение в 10-20 раз больше, а полное отсутствие потери координаты при реверсе позволяет обеспечить строго детерминированный характер перемещения исполнительного органа по оси У.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКООРДИНАТНАЯ МЕТРОЛОГИЧЕСКАЯ ПЛАТФОРМА | 2007 |
|
RU2365953C1 |
| БЕСКОНТАКТНОЕ АЭРОМАГНИТНОЕ ЛИНЕЙНОЕ НАПРАВЛЯЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2009 |
|
RU2451590C2 |
| ИЗОБРАЖАЮЩИЙ МИКРОЭЛЛИПСОМЕТР | 2010 |
|
RU2503922C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФАЗЫ ОБЪЕКТНОГО ПУЧКА НА ПИКСЕЛЕ ФОТОПРИЕМНИКА И СПОСОБ ПОЛУЧЕНИЯ ФАЗОВОГО ПОРТРЕТА ОБЪЕКТА | 2011 |
|
RU2463552C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МИКРОРЕЛЬЕФА ОБЪЕКТА И ОПТИЧЕСКИХ СВОЙСТВ ПРИПОВЕРХНОСТНОГО СЛОЯ, МОДУЛЯЦИОННЫЙ ИНТЕРФЕРЕНЦИОННЫЙ МИКРОСКОП ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2001 |
|
RU2181498C1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ МИКРОРЕЛЬЕФА ОБЪЕКТА | 2012 |
|
RU2495372C1 |
| СПОСОБ БЕСКОНТАКТНОГО ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО ЭЛЕМЕНТА | 2001 |
|
RU2222725C2 |
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ ОБЪЕКТА | 2012 |
|
RU2517962C1 |
| БЕСКОНТАКТНАЯ МАГНИТНАЯ ВИНТОВАЯ ПЕРЕДАЧА И ЕЕ ВАРИАНТЫ | 2000 |
|
RU2183773C2 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ОПТИКО-ФИЗИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТА | 1998 |
|
RU2156453C1 |
Изобретение относится к устройствам для позиционирования. Устройство включает направляющую, установленный на ней первый элемент с приводом его линейного перемещения, второй элемент, установленный на второй направляющей, ортогональной первой. Элементы имеют возможность взаимного перемещения вдоль оси, расположенной под острым углом к оси одной из направляющих и лежащей в плоскости ортогональной оси второй направляющей. Обе направляющие выполнены аэростатическими, а первый и второй элементы размещены на каретках, которые имеют возможность перемещения по соответствующим направляющим. Элементы установлены каждый на своей каретке с возможностью поворота относительно оси перемещения каретки на один и тот же угол. Элементы разделены между собой зазорами, форма сечения которых плоскостью, перпендикулярной оси перемещения, постоянная, и предназначенными для формирования аэростатического зазора. Элементы снабжены дросселями. Устройство снабжено внешним источником сжатой текучей среды, который сообщен с дросселями элементов и направляющими. Изобретение повышает точность позиционирования объектов в нанометровом диапазоне. 1 з.п. ф-лы, 1 ил.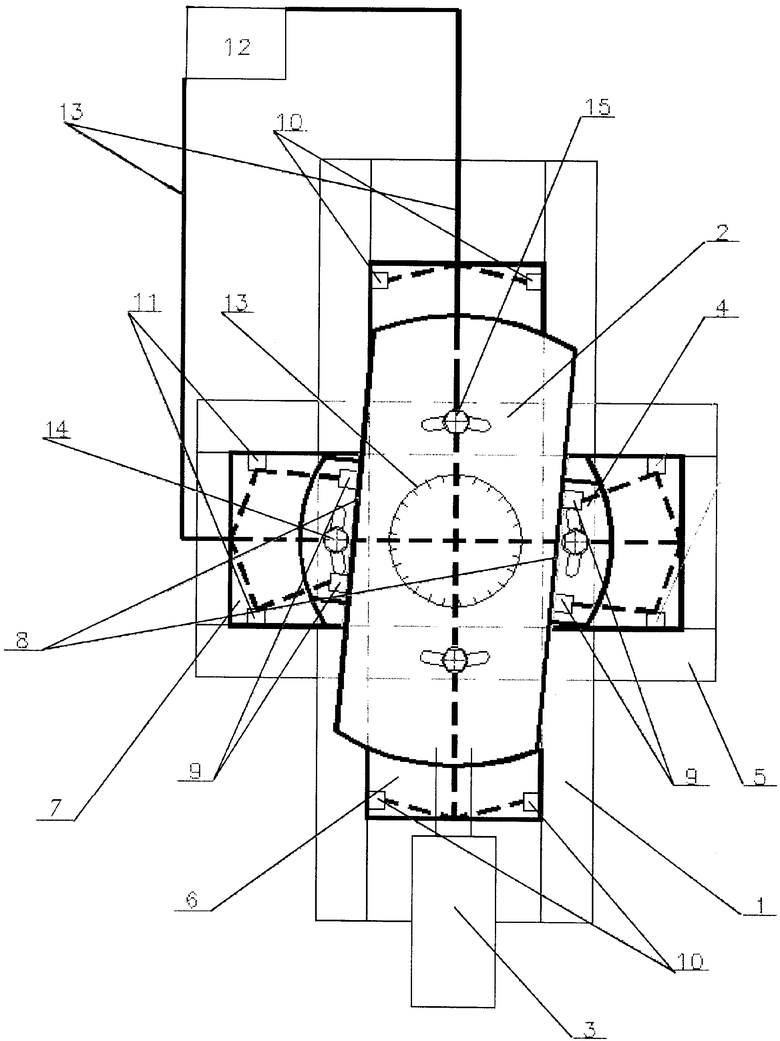
1. Устройство перемещения объекта, включающее направляющую, установленный на ней первый элемент с приводом его линейного перемещения, второй элемент, установленный на второй направляющей, ортогональной первой, причем элементы имеют возможность взаимного перемещения вдоль оси, расположенной под острым углом к оси одной из направляющих и лежащей в плоскости ортогональной оси второй направляющей, отличающееся тем, что обе направляющие выполнены аэростатическими, а первый и второй элементы размещены на каретках, которые имеют возможность перемещения по соответствующим направляющим, при этом элементы установлены каждый на своей каретке с возможностью поворота относительно оси перемещения каретки на один и тот же угол, причем элементы разделены между собой зазорами, форма сечения которых плоскостью перпендикулярной оси перемещения постоянная, и предназначенными для формирования аэростатического зазора, элементы снабжены дросселями, и устройство снабжено внешним источником сжатой текучей среды, который сообщен с дросселями элементов и направляющими.
2. Устройство по п.1, отличающееся тем, что привод линейного перемещения выполнен в виде или бесконтактной магнитной передачи, или механической передачи, или линейного двигателя.
| РЕЙСМУСОВЫЙ СТАНОК | 2001 |
|
RU2201335C2 |
| ЛИНЕЙНЫЙ ДВИГАТЕЛЬ И ПОЗИЦИРУЮЩЕЕ УСТРОЙСТВО, СОДЕРЖАЩЕЕ ПО МЕНЬШЕЙ МЕРЕ ОДИН ЛИНЕЙНЫЙ ДВИГАТЕЛЬ | 1990 |
|
RU2037944C1 |
| КООРДИНАТНЫЙ СТОЛ (ВАРИАНТЫ) | 2003 |
|
RU2244617C1 |
| УСТРОЙСТВО ШАГОВОГО ПЕРЕМЕЩЕНИЯ | 1990 |
|
RU2051464C1 |
| Устройство для перемещения головки записи-воспроизведения в накопителе информации | 1979 |
|
SU1188782A1 |
| US 4512107 A, 23.04.1985 | |||
| US 5136815, 11.08.1992. | |||

