1
Изобретение относится к системам, в которых обеспечивается плавное переключение с автоматического слежения за регулируемом процессом на ручное и обратно (с ручного на автоматическое) за счет формирования сигнала управлени путем сравнения выходного сигнала регулятора с задаваемым сигнгшом ручного управления и может быть использовано для управления объектами :различногр назначения.
Известны системы управления, содержащие основной контур-управления, состоящий из задатчика, сумматора, переключателя, регулятора и исполнительного механизма, и контур ручного управления, содержащий пуль упрайления оператора, переключатель и усилитель-интегратор, в основе которых лежит принцип фиксации величины сигнала управления в момент переключения и добавления к нему сигнсша, соответствунлдего разности между зафиксированным сигналом и необходимым выходным
Однако в ряде практических случаев при управлении технологическими процессами, появляется необходмость перехода как с ручного на
автоматическое управление, так и обратно, например, когда автсмиатическому управлению угрожает возможность срыва, а оператор, обладая свойством селективности, может дискриминировать и парировать возникгиощие помеховые ситуации.
В этом случае эти системы обладают низкой точностью, так как к
0 этому моменту команда ручного управления не подготовлена и переход с автоматического на ручное управление, в основном, зависит от оператора, его подготовленности, а при регулировании некоторых технологических процессов недопустим срыв управления ни при переходе с ручного на автоматическое управление, ни обратно.
Наиболее близким по технической
0 сущности к предлагаемой является сиЬтема управления, содержащая последовательно соединенные задатчик, первый сумматор, первый переключатель, регулятор и исполнительный ме5ханизм, вькод которого соединен со вторым входом первого сумматора, и пульт управления Оператора, первый выход которого соединен с первым входом второго сумматора, второй вход которого соединен с выходом
0
регулятора, а выход второго сумматора через второй переключатель соединен со входом интегрирующего усилителя , управляющие входы обоих переключателей соединены со вторым выходом пульта управления оператора з.
Недостатком такой системы являетс низкая надежность и точность.
Цель изобретения - повышение надежности и точности системы.
Поставленная цель достигается тем, что в системе установлен масшта бйрующий усилитель, вход которого содинен с выходом интегрирующего усилителя и с третьим входом второго суммтора, а выход - с третьим входом второго переключателя.
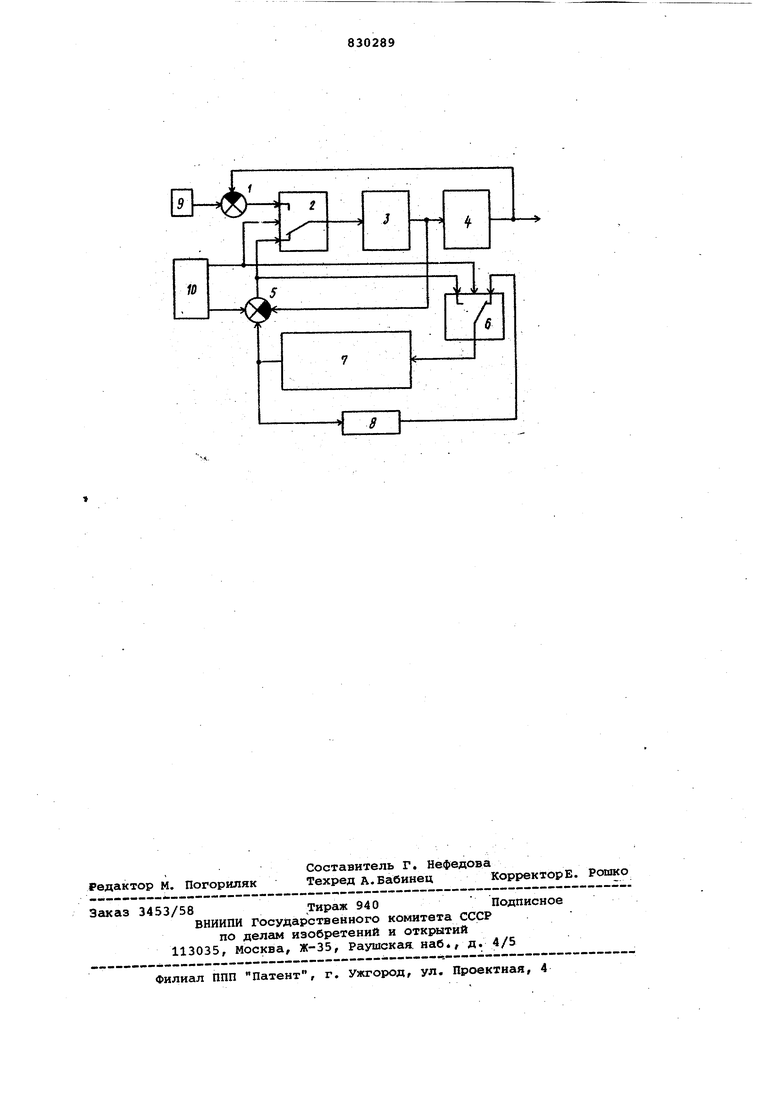
На чертеже представлена функциональная схема системы.
Система содержит первый сумматор 1, первый переключатель 2, регулятор 3, исполнительный механизм 4, интегрирующий усилитель 7, масштабирующий усилитель 8, задатчик 9, пуль 10 управления оператора. В режиме ручного управления, в системе, управляющие входы первого 2 и второго б переключателей обесточены, в результате чего подвижные контакты этих переключателей соединены со своими вторыми входами. Выход регулятора 3 (первого интегратора) через второй сумматор 5 и первый переключатель 2 соединен со своим входом, вследствие чего сигнал на выходе регулятора 3 (первого интегратора) равен нулю. Выход интегрйруквдего усилителя 7 через масштабирующий усилитель 8 и вто рой переключатель б соединен со своим входом , в силу чего сигнал на выходе интегрирующего усилителя 7 также равен нулю. При подключении выхода масштабирующего усилителя 8 через второй переключатель 6 к входу интегрирующего усилителя 7 максимёшьно возможное напряжение на выходе интегрирующего усилителя 7 становится равным нулю за время, котрое необходикю оператору для переключения на режим ручного управления, например за 8-15 сек.
Система работает следующим образом.
.При подаче сигнала с пульта 10 управления оператора через второй сумматор 5, первый переключатель 2 на вход регулятора 3 (первого интегратора), на его выходе появляется сигнал управления, который пропорционсшен интегралу от входного воздействия. Этот сигнал подается на вход исполнительного механизма 4 (второго интегратора) и на второй вход второго сумматора 5. В результате такого соединения блоков на выходе регулятора 3 (первого интегратора) устанавливается сигнал, который авен по величине сигналу с пульта 10 управления оператора.
При изменении величины сигнала с пульта 10 управления оператора сигнал на выходе регулятора 3 также меняется, так как сигнал с выхода регулятора 3 (первого интегратора) сравнивается на втором сумматоре 5 с сигнгшом ручного управления от пульта 10 управления оператора и разностный сигнёш подается на вход регулятора 3 (первого интегратора), причем величина этого разностного сигнала зависит от коэффициента усиления в этом контуре. С выхода регулятора 3 (первого интегратора) сигнал через исполнительный механизм 4 воздействует на регулируемый объект При появлении возможности переключения на режим, автоматического управлния на управляющие входы первого 2 и второго 6 переключателей с пульта 10 управления оператора подается команда, в результате чего их подвижные контакты замыкгиотся со своим первыми входами. На вход регулятора 3, на выходе которого остался сигнал, соответствукяций величине сигнала ручного управления, подается с вЁосода сумматора 1 сигнал, равный разности сигналов с задатчика 9 и исполнительного механизма 4. Под действием этого сигнала выходной сигнсш регулятора 3 (первого интегртора) увеличивается (ь еньшается) и исполнительный механизм 4, отрабатывая сигнсШ регулятора 3, стремитс изменить величину сигнала с выхода первого суыалатора 1 к нулю, обеспечивает равенство сигналов задания регулируемой координаты. Выходной сигнал регулятора 3 подается также на второй вход второго сумматора 5, с выхода, которого через второй переключатель б - на вход интегрирующего усилителя 7. С выхода интегрирующего усилителя 7 сигнеш подается на третий вход второго сумматора 5, на котором происходит сравнение выходных сигналов регулятора 3 и интегрирукнцего усилителя 7, причем разностный сигнал на выходе второго сумматора 5 зависит от коэффициентов блоков 5 - 7 и будет тем меньше, чем больше коэффициент усиления указанного контура. Таким образом, на выходе интегрирукяцего усилителя 7 устанавливается сигнал, величина которого соответствует выходному сигналу с вьлхода регулятора 3, т.е. управляющему сигналу.
В случае возникновения угрозы срыва автоматического управления или по каким-либо другим причинам, оператор может перейти на режим ручного управления, для чего управляющие входы первого 2 и второго б переключателей обесточиваются по сигналу с пульта 10.управления оператора и подвижные контакты этих переключателей устанавливаются в
исходное положение. При этом вход регулятора 3 отеключается от выхода первого сумматора 1 и подключается к выходу второго сумматора 5, а вход интегрирующего усилителя 7 отключается от выхода сумматора 5 и подключается к выходу масштабирукяцего усилителя 8. В результате этого переключения с выхода второго сумматора 5 на вход регулятора 3 подается сигнал, равный разности между выходными сигиалами регулятора 3 и интегрируюйегр усилителя 7, который близок к нулю, т.е. величина сигнала на выходе регулятора 3 остается такой же, какой она была в момент переключения, и исполнительный механизм продолжает отрабатывать задаваемую величину. Одновременно с зтим выход интегрирующего усилителя 7 через масштабирующий усилитель 8 и второй переключатель б замыкается со своим входом, в результате чего сигнал на выходе интегрирующего усилителя 7 уменьшается со скоростью, определяемой параметрами масштабирующего усилителя 8 и интегрирующего усилителя 7 через второй сумматор 5 оказыва т свое влияние на работу исполнительного механизма 4, т.е. второго интегратора 4, что не должно остаться незамеченным оператором. Оператор воздействуя на соответствующие органы пульта 10; управления оператора, парирует падение сигнала на выходе интегрирующего усилителя 7 и, в случае необходимос и, и изменение параметров, иапример, скорости протек cuoщего процесса. Через определенное, удобное для оператора, время сигнал на вызеОде интегрирующего усилителя 7 становится равным нулю, а на выходе пульта 10 управления оператора равным выходному сигналу регулятора 3, т.е. необходимому для работы исполнительного механизма 4.
Таким образом, предлагаемая система регулирования позволяет осуществлять переключение с автоматического на ручное и с ручного на автоматическое управление без скачка сигнала управления. Система характеризуется еще одной особенностью, которая заключается в том, что выходной сигнал второго сумматора 5 в режиме автсялатического упра ления инвариантен к нулевому или вообще к сигналу с пульта 10 управления оператора и всегда близок или равен нулю, так как выходной сигнал интегрирующего усилителя 7 в этом режиме равен сумме сигнгшов с пульта 10 управления onepaxdpd и регулятог ра 3. А это значит, что к пульту 10 управления оператора могут предъявляться менее жесткие требования по величине нулевого сигнала, а оператору не обязательно устанавливать в нулевое положение орган управления пульта 10 управления оператора ;при переходе в режим автоматического управления.
Предлагаемая система может найти широкое применение при регулировании различных технологических процессов, особенно при управлении процессами
со скоротечным нелинейным изменением параметров регулирования и работе в усло.виях действия помех. - Использование предлагаемой .системы повышает точность регулирования
5 в условиях переключения на режим ручного управления в 5-15 раз и тем заметнее, чем выше скорость изменения регулируемой величины.
Формула изобретения
20
Система управления содержащая последовательно соединенные задатчик, первый сумматор, первый переключатель, регулятор и исполнительный механизм, выход которого соединен со вторым входом первого сумматора, и пульт управления оператора, первый выход которого соединен с первьм входом второго сумматора, второй вход которого соединен с выходсш регулятора, а выход второго сумматора через второй переключатель соединен со входом интегрирующего усилителя, управляющие входы переключателей соединены со вторым выходом
пульта управления оператора, отличающаяся тем, что, с целью повышения надежности и точности системы, в ней установлен масштабирукядий усилитель, вход которого соег динен с выходом интегрирующего усилителя и с третьим входом второго сумматора, а выход - с третьим входом второго переключателя, первый
вход которого соединен с третьим. входом первого переключателя. Источники инфОЕ ации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 391534, кл. G 05 В 11/28, 1971.
2.Патент США 3940594,
кл. 235 - 150.1, заявл. 13.08.74, опублик. 24.02.74.
3. Авторское свидетельство СССР по заявке 2127665/18-24, кл. G 05 В 11/46, 1975.
,4. Патент США № 3662276, кл. 330-1А, заявл. 02.10.70, опубЛик. 09.05.72.
5. Патент Японии № 51-20671, кл. 54(7) С 141, заявл. 08.07.70, Ьпублик. 26.06..76 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОК РУЧНОГО РЕЗЕРВИРОВАНИЯ | 2004 |
|
RU2282882C1 |
| Устройство для управления приводом тормоза шахтной подъемной машины | 1988 |
|
SU1680614A1 |
| РЕГУЛЯТОР ПНЕВМОЭЛЕКТРИЧЕСКИЙ | 2005 |
|
RU2308067C2 |
| Система управления | 1979 |
|
SU842722A1 |
| Устройство для оценки работы операторов | 1987 |
|
SU1441442A1 |
| Устройство сопряжения функциональных блоков систем управления | 1986 |
|
SU1441347A1 |
| Способ адаптивного управления исполнительным механизмом | 2023 |
|
RU2821298C1 |
| ТРЕНАЖЕР ОПЕРАТОРОВ СИСТЕМ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ | 1990 |
|
RU2047909C1 |
| Система автоматического регули-РОВАНия уРОВНя МЕТАллА B КРиСТАлли-зАТОРЕ | 1979 |
|
SU839669A1 |
| Устройство для регулирования многопараметрического объекта | 1975 |
|
SU1080115A1 |