Изобретение относится к области вооружения, а именно к ракетной технике, и может быть использовано при разработке комплексов управляемого вооружения, где в качестве носителей применяются летательные аппараты, самоходные установки и т.п.
В ракетных комплексах большое значение имеют вопросы взаимной стыковки между различными подсистемами и изделиями. От степени правильности согласования их как по конструктивным, так и по электрическим параметрам и их взаимосвязям зависят в большей степени тактико-технические характеристики комплекса в целом.
Известны способ управления стартом ракеты и ракетный комплекс для его осуществления [В.П.Демидов, Н.Ш.Кутыев ″Управление зенитными ракетами", М.: Военное издательство, 1989 г., стр.6-10].
Способ управления стартом ракеты заключается в том, что производят начальное прицеливание ракеты, включение бортового источника питания, а также включение двигательной установки, осуществляющей старт и полет ракеты.
Как следует [В.П.Демидов, Н.Ш.Кутыев ″Управление зенитными ракетами", М.: Военное издательство, 1989 г., стр.12, рис.1.5], команды управления после старта подают на ракету с помощью электромагнитного излучения, а при управлении стартом - через проводные линии связи.
Ракетный комплекс, который реализует этот способ, содержит ракету, в которую входят элементы электромеханической стыковки ракеты и бортовая аппаратура управления полетом (блок приема и обработки команд управления с силовым приводом), при этом элементы электромеханической стыковки ракеты связаны с системой электропитания пункта управления через устройство электромеханической стыковки пусковой установки и электромеханические цепи подготовки и пуска ракеты. Это следует из описания предстартового обслуживания ракеты, при котором предусматривается вывод на режим бортовых источников питания, а также подача на ракету команды на запуск двигательной установки, начальных данных, определяющих, например, режим работы бортовой аппаратуры и т.д.
Следовательно, недостатком известных способа управления ракетой и ракетного комплекса, основанного на нем, является низкая надежность из-за наличия проводных линий связи, т.е. электромеханических связей.
Задачей настоящего изобретения (способа и устройства) является повышение надежности за счет исключения электромеханических связей между ракетой и пусковой установкой.
Поставленная задача решается в способе управления стартом ракеты за счет того, что осуществляют включение бортового источника питания и стартовой установки, предварительно генерируют на пусковой установке энергию, которую подают на ракету, где преобразуют ее в электрический сигнал, осуществляющий предстартовую установку и запуск датчика утла крена, а также включение бортового источника питания и стартовой установки ракеты.
Ракетный комплекс, основанный на этом способе, содержит пусковую установку, на которой расположена ракета, в которую входят бортовой источник питания, устройство запуска стартовой установки и последовательно соединенные бортовая аппаратура управления и силовой привод, а на пункте управления - последовательно включенные прицел-прибор наведения и система электропитания; на ракете введены юстируемый датчик угла крена и преобразователь энергии, а на пусковой установке - генератор энергии, который связан со входом преобразователя энергии и с системой электропитания, при этом выход преобразователя энергии соединен со входом запуска бортового источника питания, юстируемого датчика угла крена и устройством запуска стартовой установки, причем выходы юстируемого датчика угла крена по курсу и тангажу соединены с соответствующими входами бортовой аппаратуры управления.
Заявленный способ реализуется следующим образом. Для управления стартом на пусковой установке, например с пункта управления, генерируют, например механическую энергию в виде удара, которую подают на ракету (в определенное место). Эта энергия на ракете преобразуется в электрический сигнал, который осуществляет предстартовую установку и запуск датчика угла крена, т.е. раскрутку ротора гироскопа, в котором на оси внешней рамки закреплен эксцентричный грузик (маятник), осуществляющий по вертикали предстартовую ориентацию ракеты на пусковой установке, а затем после раскрутки ротора гироскопа, когда датчик угла крена "запомнил″ исходное положение ракеты на пусковой установке, этот грузик отстыковывают.
Кроме того, этот электрический сигнал, сформированный на борту ракеты, включает бортовой источник питания, например, при подаче его на электровоспламенитель термобатареи, а затем запускают стартовую установку ракеты.
После старта ракеты с пункта управления на нее подают сформированные команды управления, а ракета принимает и преобразует их в команды наведения на цель.
Таким образом, без электрических связей ракеты с пусковой установкой осуществляют пуск ракеты при нахождении ее в любом произвольном положении (по углу крена) на пусковой установке.
Предлагаемое изобретение поясняется чертежом,где изображена структурная схема ракетного комплекса, где 1 - пункт управления (ПУ), 2 - пусковая установка (ПУС), 3 - прицел-прибор наведения (ППН), 4 - система электропитания (СЭ), 5 - генератор энергии (ФЭ), 6 - ракета (Р), 7 - бортовая аппаратура управления (БАУ), 8 - юстируемый датчик угла крена (ДУК), 9 - преобразователь энергии (ПЭ), 10 - силовой привод (СП), 11 - бортовой источник питания (БИП), 12 - устройство запуска стартовой установки (УЗ).
В ракетном комплексе на пусковой установке 2 расположена ракета 6, на которой последовательно соединены бортовая аппаратура управления 7 и силовой привод 10. На пункте управления 1 последовательно включены прицел-прибор наведения 3 и система электропитания 4. Генератор энергии 5 связан со входом преобразователя энергии 9 и с системой электропитания 4. Выход преобразователя энергии 9 соединен со входами запуска бортового источника питания 11, юстируемого датчика угла крена 8 и устройства запуска стартовой установки 12. Выходы юстируемого датчика угла крена 8 по курсу и тангажу соединены с соответствующими входами бортовой аппаратуры управления 7.
Прицел-прибор наведения 3 и бортовая аппаратура управления 7 могут быть выполнены соответственно как аппаратура пункта управления и бортовая аппаратура снаряда в лучевой системе теленаведения ["Основы радиоуправления" под ред. Вейцеля В.А. и Типугина В.Н. - М.: Сов. радио, 1973 г., стр.276, рис.5.3]. Система электропитания 4, например аккумуляторная батарея, запитывающая прицел-прибор наведения 3, начало рабочего цикла которого определяет момент срабатывания генератора энергии 5. Пусковая установка 2, например ствол пушки.
Юстируемый датчик угла крена 8 может быть выполнен как позиционный гироскоп ["Основы радиоуправления" под ред. Вейцеля В.А. и Типугина В.Н. - М.: Сов. радио, 1973 г., стр.52, рис.1.29], в котором ротор гироскопа укреплен в двух рамках карданного подвеса, при этом ось уГ - направление полета ракеты. Следовательно, электрический сигнал, снимаемый с потенциометра П, несет информацию о величине угла крена ракеты в системе декартовых координат Z0Y, где "0" - начало координат, "Z" - тангаж, "Y" - курс.
Для установки направления вертикали применяют маятниковые устройства, которые воспринимают направление гравитационного поля Земли [Э.Дж.Сифф, К.Л.Эммерич "Введение в гироскопию", М.: Машиностроение, 1965 г., стр.61-64, рис.4.8], при этом маятник закрепляют, например, в подшипнике, установленном на оси внешней рамки гироскопа, и после раскрутки ротора гироскопа его механически отстыковывают. Таким образом, в момент старта ракеты система декартовых координат ракеты Z0Y, где "0" - начало координат, "Z" - тангаж и "Y" - курс будет привязан к системе декартовых координат пункта управления, в которой формируют и передают на ракету команды управления.
Преобразователь энергии 9 может быть индукционным, основанным на перемещении катушки в поле постоянного магнита. Перемещение можно осуществить избыточным давлением, создающимся при прокалывании капсюля пиропатрона. Кроме того, преобразователь энергии 9 можно выполнить пьезоэлектрическим или фотоэлектрическим. В последнем случае генератор энергии 5 может быть светодиодом, а преобразователь энергии 9 - фотодиодом. Преобразователь энергии 9 может быть расположен в центре торца контейнера, в котором находится ракета 6, или в центре торца ракеты 6 и т.д.
Бортовой источник питания 11, например термобатарея. Устройство запуска стартовой установки 12, например электровоспламенитель вышибного заряда ракеты.
Заявленное устройство, приведенное на чертеже, работает следующим образом. В исходном состоянии ракета 6 находится на пусковой установке 2. При включении системы электропитания 4 на пункте управления 1 запитывается прицел-прибор наведения 3. При пуске ракеты 6 срабатывает генератор энергии 5, который запускает прицел-прибор наведения 3 (через систему электропитания 4) и одновременно оказывает воздействие на преобразователь энергии 9 и инициирует на его выходе электрический сигнал. Этот сигнал поступает, например, на электровоспламенитель, который создает избыточное давление, благодаря которому раскручивается ротор гироскопа, при этом осуществляется предстартовая (относительно вертикали) юстировка датчика угла крена 8, в состав которого входит гироскоп.
Поскольку вертикаль выставляет эксцентрический груз в юстируемом датчике угла крена, то независимо от расположения ракеты (по крену) на пусковой установке осуществляется привязка декартовой системы координат ракеты 6 (по курсу и тангажу) к соответствующим декартовым координатам пункта управления 1, а значит, и прицела-прибора наведения 3, что исключает скручивание координат ["Основы радиоуправления" под ред. Вейцеля В.А. и Типугина В.Н. М.: Сов. радио, 1973 г., стр.64].
Одновременно сигнал с выхода преобразователя энергии 9 поступает на вход, например, электровоспламенителя и запускает бортовой источник питания 11.
После раскрутки ротора гироскопа, отключения маятника (эксцентрического груза) в датчике 8 и выхода на рабочий режим бортового источника питания 11 происходит запуск стартовой установки и ракета 6 сходит с пусковой установки 2.
С момента встреливания ракеты в луч (например, в системе теленаведения по лучу), сформированный прицелом-прибором наведения 3, ракета 6 принимает электромагнитное излучение и обрабатывает его, при этом на выходе бортовой аппаратуры управления 7 в соответствии с выходными сигналами с юстируемого датчика угла крена 8 формируются команды управления по курсу и тангажу в декартовой системе координат ракеты 6. Эти команды поочередно, например для ракеты, вращающейся по углу крена, поступают на вход силового привода 10, который отрабатывает их и смещает ракету 6 в центр поля управления, т.е. в точку прицеливания.
Как следует из изложенного выше, в заявленном устройстве исключены электрические связи (в том числе разъемы, разрывные цепи и т.д.) между ракетой 6 и пусковой установкой 2.
Следовательно, в способе управления стартом ракеты за счет того, что генерируют на пусковой установке энергию, которую подают на ракету, где преобразуют ее в электрический сигнал, осуществляющий предстартовую установку и запуск датчика угла крена, а также включение бортового источника питания и стартовой установки ракеты повышена надежность за счет исключения электромеханических связей между ракетой и пусковой установкой.
Введение в ракетный комплекс на ракете юстируемого датчика угла крена и преобразователя энергии, а на пусковой установке - генератора энергии, который связан со входом преобразователя энергии и с системой электропитания, при котором выход преобразователя энергии соединен со входом запуска бортового источника питания, юстируемого датчика угла крена и устройством запуска стартовой установки, причем выходы юстируемого датчика угла крена по курсу и тангажу соединены с соответствующими входами бортовой аппаратуры управления, исключает электромеханические связи между ракетой и пусковой установкой, что повышает надежность.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВВОДА РАКЕТЫ В ЗОНУ ЛУЧА И КОМПЛЕКС ТЕЛЕУПРАВЛЯЕМОЙ В ЛУЧЕ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2257522C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ РАКЕТОЙ И РАКЕТНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2258900C1 |
| СПОСОБ ВВОДА В ЗОНУ УПРАВЛЕНИЯ РАКЕТЫ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И РАКЕТНЫЙ КОМПЛЕКС | 2007 |
|
RU2362107C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕОРИЕНТИРУЕМОЙ В ЛУЧЕ РАКЕТЫ И РАКЕТНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2266509C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БАЛЛИСТИЧЕСКОГО САМОНАВОДЯЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА "ПОВЕРХНОСТЬ - ПОВЕРХНОСТЬ" | 2002 |
|
RU2216708C1 |
| Управляемая пуля | 2019 |
|
RU2713831C1 |
| Ракетный комплекс | 2024 |
|
RU2839988C1 |
| УСТРОЙСТВО ДЛЯ ЗАПУСКА РАКЕТЫ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2465532C1 |
| ПРОТИВОВОЗДУШНЫЙ АВТОНОМНЫЙ УНИВЕРСАЛЬНЫЙ КОМПЛЕКС САМООБОРОНЫ ПОДВОДНЫХ ЛОДОК ("ПАУК" СО ПЛ) И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2008 |
|
RU2382313C2 |
| УПРАВЛЯЕМАЯ РАКЕТА В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ | 2012 |
|
RU2518126C2 |
Изобретение относится к области вооружения, а именно к ракетной технике, и может быть использовано при разработке комплексов управляемого вооружения. Технический результат - повышение надежности за счет исключения электромеханических связей между ракетой и пусковой установкой. Предложен способ управления стартом ракеты, при котором генерируют на пусковой установке энергию, которую подают на ракету, где преобразуют ее в электрический сигнал, осуществляющий управление стартом ракеты, в том числе предстартовую установку и запуск датчика угла крена. В ракетный комплекс введены: на ракете юстируемый датчик угла крена и преобразователь энергии, а на пусковой установке - генератор энергии, который связан с входом преобразователя энергии и с системой электропитания. Выход преобразователя энергии соединен с входами запуска бортового источника питания, юстируемого датчика угла крена и устройства запуска стартовой установки. Выходы юстируемого датчика угла крена по курсу и тангажу соединены с соответствующими входами бортовой аппаратуры управления. 2 н.п. ф-лы, 1 ил.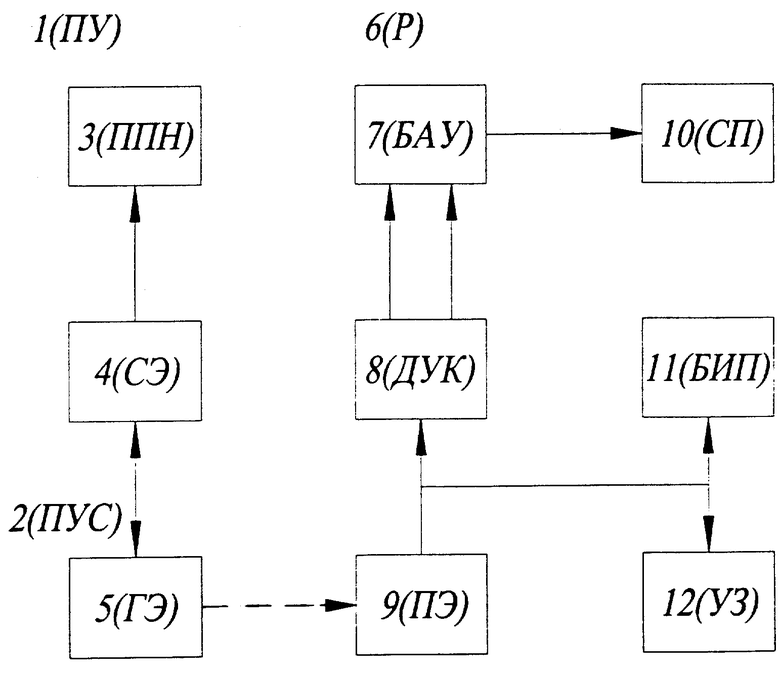
| ДЕМИДОВ В.П., Управление зенитными ракетами, М., Военное издательство, 1989, с.12, рис.1.5 | |||
| УСТРОЙСТВО РАССТЫКОВКИ СОЕДИНИТЕЛЯ МЕЖДУ РАКЕТОЙ И ТРАНСПОРТНО-ПУСКОВЫМ КОНТЕЙНЕРОМ | 1999 |
|
RU2165579C2 |
| ВЫСТРЕЛ И ПУСКОВОЕ УСТРОЙСТВО ДЛЯ ВЫСТРЕЛА | 1996 |
|
RU2107245C1 |
| US 3724322 A, 03.04.1973 | |||
| US 4092898 A, 06.06.1974. | |||

