Текст описания в факсимильном виде (см. графическую часть)м
Устройство автоматического сопровождения траекторий целей для РЛС, функционирующей в режиме обзора пространства, содержит распределитель отметок целей, N параллельно соединенных каналов сопровождения траекторий целей по числу сопровождаемых траекторий целей, вычислитель минимизированного значения функционала качества идентификации. Устройство автоматического сопровождения траекторий целей обеспечивает бесстробовую идентификацию результатов измерений и формирует оценки по результатам прогноза модели состояния, основанного на гипотезе движения цели с ускорением с использованием экстраполятора второго порядка, учитывающего вторую производную изменения фазовой координаты. Достигаемым техническим результатом изобретения являются высокие показатели достоверности отождествления измерений, разрешающей способности РЛС, точности и устойчивости сопровождения маневрирующих целей даже на пересекающихся трассах, низкую вероятность сопровождения ложных трасс и перепутывания траекторий. 4 з.п. ф-лы, 37 ил.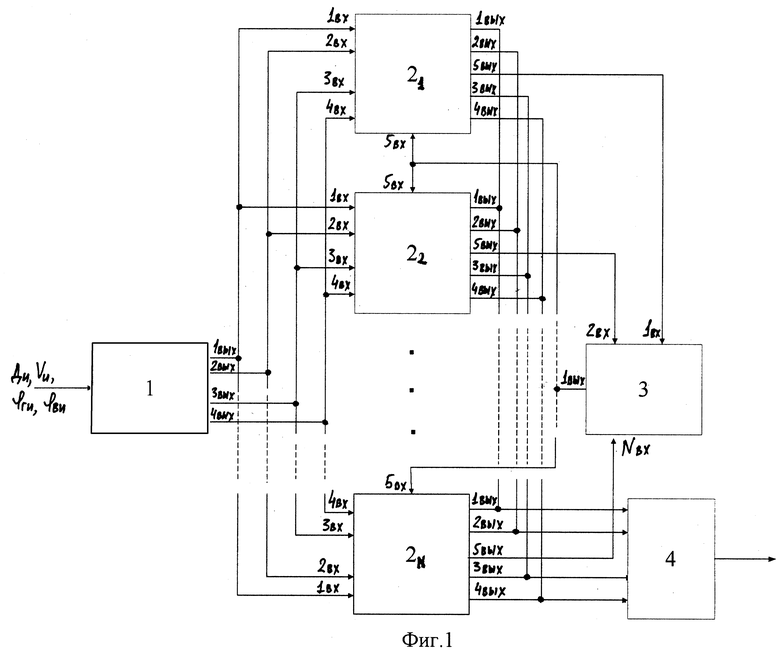
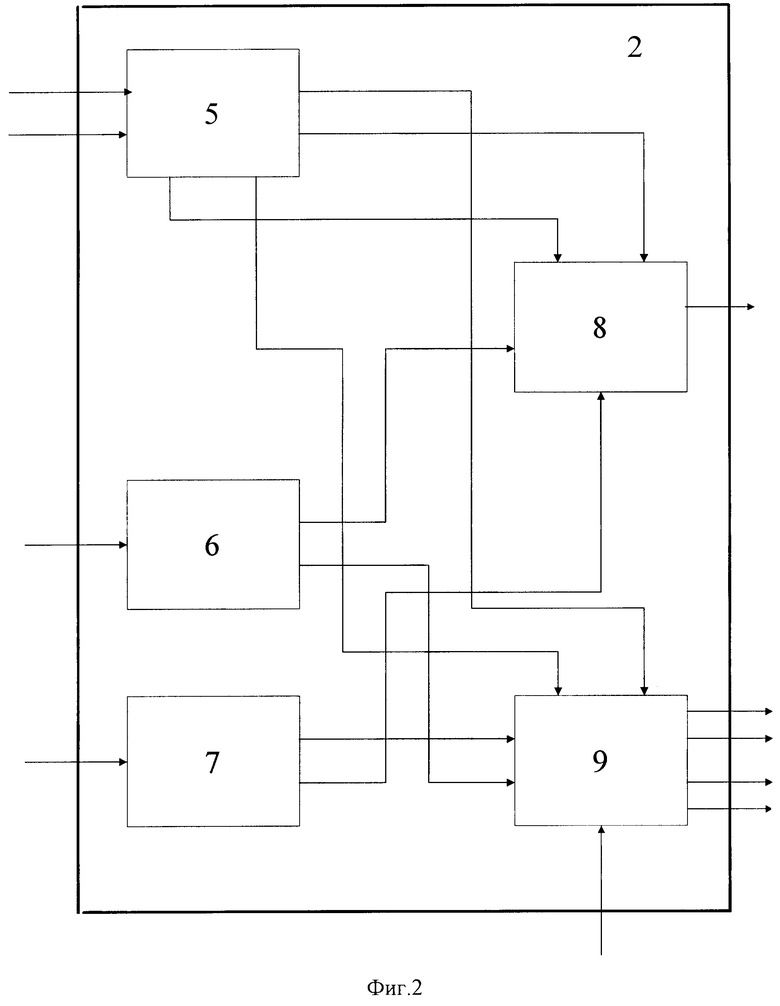
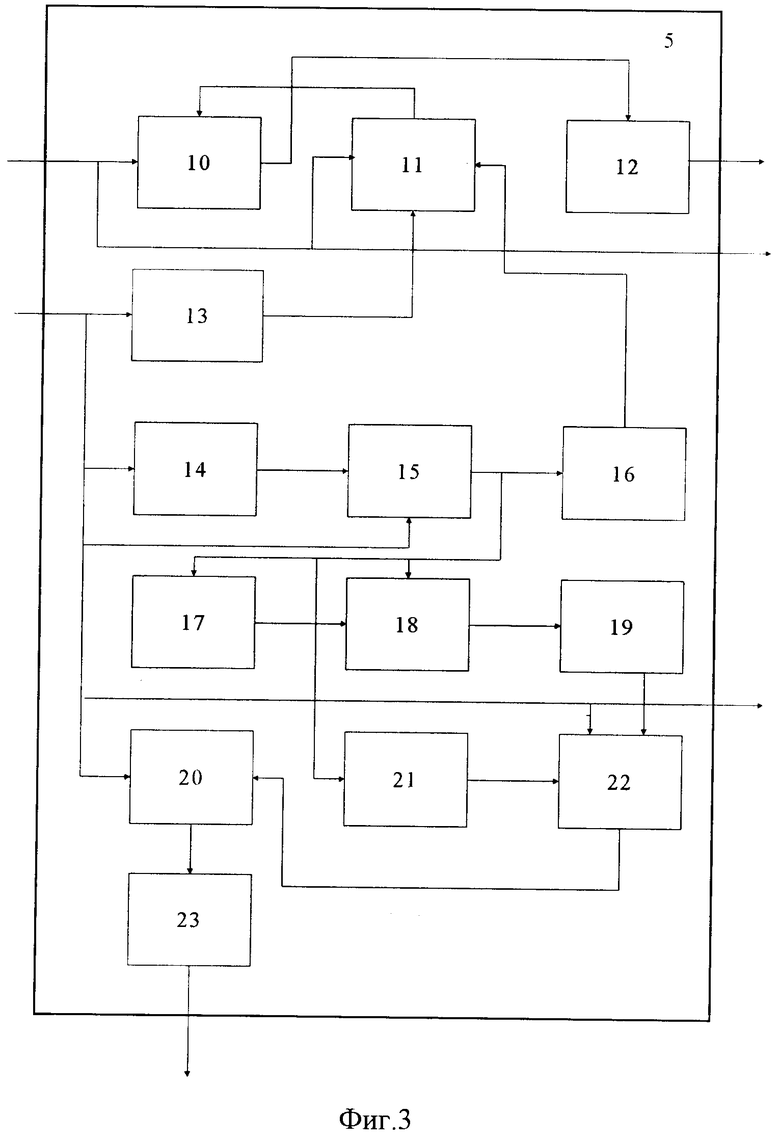
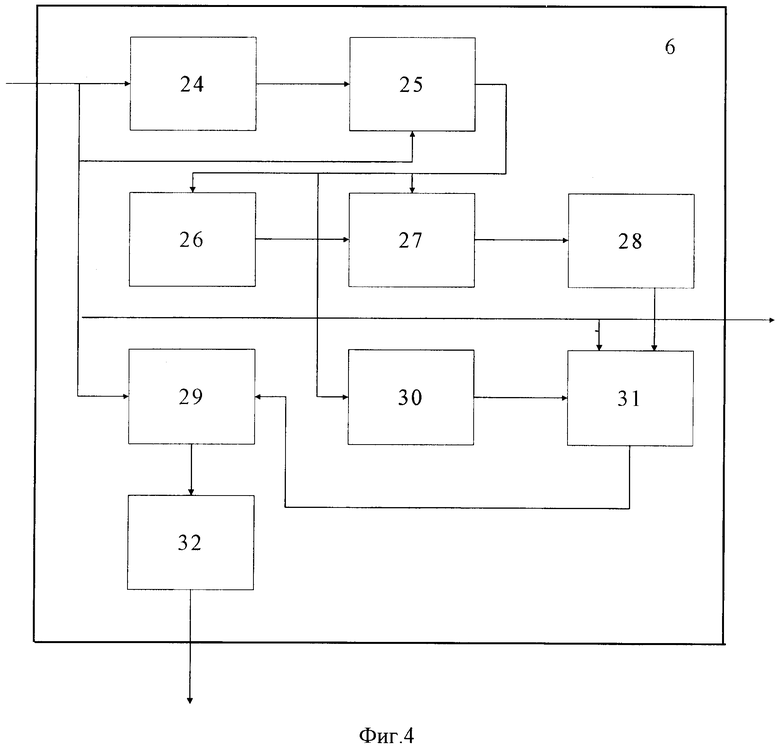
1. Устройство автоматического сопровождения траекторий целей, на вход которого поступают измеренные в РЛС значения дальности, скорости, угловых пеленгов в горизонтальной и вертикальной плоскостях, сопровождаемых РЛС целей, отличающееся тем, что оно содержит распределитель отметок целей, N параллельно соединенных каналов сопровождения траектории целей (N - число сопровождаемых траекторий целей), вычислитель минимизированного значения функционала качества идентификации и мультиплексор, причем вход распределителя отметок целей является входом устройства, первый, второй, третий, четвертый выходы распределителя отметок целей соединены соответственно с первым, вторым, третьим, четвертым входами каждого из N каналов сопровождения траектории цели, первые, вторые, третьи, четвертые выходы которых объединены соответственно между собой и соединены с первым, вторым, третьим, четвертым входами мультиплексора, выход которого является выходом устройства сопровождения траекторий целей, пятые выходы N каналов сопровождения траектории цели соединены соответственно с первым, вторым, ... N-м входами вычислителя минимизированного значения функционала качества идентификации, выход которого соединен с пятыми входами каждого из N каналов сопровождения траектории цели.2. Устройство по п.1, отличающееся тем, что каждый канал сопровождения траектории цели содержит блок сопровождения цели по дальности и скорости, блок сопровождения цели по углу пеленга в горизонтальной плоскости, блок сопровождения цели по углу пеленга в вертикальной плоскости, вычислитель функционала качества идентификации, коммутатор, причем первый и второй входы блока сопровождения цели по дальности и скорости являются соответственно первым и вторым входами канала сопровождения траектории цели, вход блока сопровождения цели по углу пеленга в горизонтальной плоскости является третьим входом канала сопровождения траектории цели, вход блока сопровождения цели по углу пеленга в вертикальной плоскости является четвертым входом канала сопровождения траектории цели, а первый и второй выходы блока сопровождения цели по дальности и скорости, первые выходы блоков сопровождения целей по углу пеленга в горизонтальной плоскости и углу пеленга в вертикальной плоскости соединены соответственно с первым, вторым, третьим, четвертым входами коммутатора, пятый вход которого является пятым входом канала сопровождения траектории цели, а первый, второй, третий, четвертый выходы являются соответственно первым, вторым, третьим, четвертым выходами канала сопровождения траектории цели, третий и четвертый выходы блока сопровождения цели по дальности и скорости, вторые выходы блоков сопровождения целей по углу пеленга в горизонтальной плоскости и углу пеленга в вертикальной плоскости соединены соответственно с первым, вторым, третьим, четвертым входами вычислителя функционала качества идентификации, выход которого является пятым выходом канала сопровождения траектории цели.3. Устройство по п.2, отличающееся тем, что блок сопровождения цели по дальности и скорости содержит первое и второе вычитающие устройства, первый и второй сумматоры, первый и второй вычислители коэффициента идентификации измерений, первый, второй, третий, четвертый умножители, первую и вторую линии задержки, первый и второй вычислители производных, причем первый вход первого вычитающего устройства, первый вход первого сумматора, первый выход блока сопровождения цели по дальности и скорости соединены с первым входом блока сопровождения цели по дальности и скорости, второй вход первого вычитающего устройства соединен с выходом первого сумматора, второй и третий входы которого соединены соответственно с выходами первого и второго умножителей, выход первого вычитающего устройства соединен со входом первого вычислителя коэффициента идентификации измерений, выход которого является третьим выходом блока сопровождения цели по дальности и скорости, второй вход которого является одновременно входом первого умножителя, через первую линию задержки соединен с первым входом первого вычислителя производной, вторым входом первого вычислителя производной, вторым выходом блока сопровождения цели по дальности и скорости, первым входом второго вычитающего устройства, второй вход которого соединен с выходом второго сумматора, первый вход которого через четвертый умножитель соединен с выходом первого вычислителя производной, выход которого также подключен ко входу второго умножителя, второму входу второго вычислителя производной, входу второй линии задержки, выход которой соединен с первым входом второго вычислителя производной, выход которого через третий умножитель соединен со вторым входом второго сумматора, третий вход которого соединен со вторым входом блока сопровождения цели по дальности и скорости, а выход второго вычитающего устройства соединен со входом второго вычислителя коэффициента идентификации измерений, выход которого является четвертым выходом блока сопровождения цели по дальности и скорости.4. Устройство по п.2, отличающееся тем, что блок сопровождения цели по углу пеленга в горизонтальной плоскости содержит первую и вторую линии задержки, первый и второй вычислители производных, первый и второй умножители, вычитающее устройство, сумматор, вычислитель коэффициента идентификации измерений, причем вход блока сопровождения цели по углу пеленга в горизонтальной плоскости соединен через первую линию задержки с первым входом первого вычислителя производной, со вторым входом первого вычислителя производной, первым входом вычитающего устройства, первым входом сумматора, первым выходом блока сопровождения цели по углу пеленга в горизонтальной плоскости соответственно, выход первого вычислителя производной соединен соответственно с первым входом второго вычислителя производной, через вторую линию задержки со вторым входом второго вычислителя производной, через второй умножитель со вторым входом сумматора, выход второго вычислителя производной через первый умножитель соединен с третьим входом сумматора, выход которого соединен со вторым входом вычитающего устройства, выход которого соединен со входом вычислителя коэффициента идентификации измерений, выход которого является вторым выходом блока сопровождения цели по углу пеленга в горизонтальной плоскости.5. Устройство по п.2, отличающееся тем, что блок сопровождения цели по углу пеленга в вертикальной плоскости содержит первую и вторую линии задержки, первый и второй вычислители производных, первый и второй умножители, вычитающее устройство, сумматор, вычислитель коэффициента идентификации измерений, причем вход блока сопровождения цели по углу пеленга в вертикальной плоскости соединен через первую линию задержки с первым входом первого вычислителя производной, со вторым входом первого вычислителя производной, первым входом вычитающего устройства, первым входом сумматора, первым выходом блока сопровождения цели по углу пеленга в вертикальной плоскости соответственно, выход первого вычислителя производной соединен соответственно с первым входом второго вычислителя производной, через вторую линию задержки со вторым входом второго вычислителя производной, через второй умножитель со вторым входом сумматора, выход второго вычислителя производной через первый умножитель соединен с третьим входом сумматора, выход которого соединен со вторым входом вычитающего устройства, выход которого соединен со входом вычислителя коэффициента идентификации измерений, выход которого является вторым выходом блока сопровождения цели по углу пеленга в вертикальной плоскости.