Изобретение относится к машиностроению и может быть использовано для торможения движущихся объектов.
Известно тормозное устройство, в котором торможение объекта, соединенного с гибким элементом (трос, ремень и т.п.), осуществляется за счет того, что гибкий элемент пропущен через ряд неподвижных цилиндрических стержней (см. Теоретическая механика в примерах и задачах, т. 1. Статика и кинематика. / Под ред. Г.Ю.Джанелидзе, Д.Р.Меркина. - М.: Наука, 1967, с.119, 120, рис.152).
В этом устройстве усилие торможения

где Q - усилие торможения на выходе устройства;
Р - усилие на входе в устройство;
f - коэффициент трения скольжения гибкого элемента о стержень;
α - угол охвата стержня гибким элементом;
n - количество стержней.
Наиболее близким из известных решений является тормозное устройство (патент СН №650997, B 66 D 5/20, опубл.30.08.85), содержащее полый корпус с размещенными в нем опорами цилиндрической формы, продольные оси которых перпендикулярны продольной оси корпуса, гибкий элемент, последовательно охватывающий опоры, один из концов которого, предназначенный для соединения с объектом торможения, выведен из корпуса через сквозное осевое отверстие в одной из торцевых поверхностей.
Недостаток этих устройств - низкая эффективность при торможении объектов с начальной скоростью 20...50 м/с по причине значительного (в 2-3 раза) изменения тормозного усилия в результате изменения скорости движения тормозимого объекта и, соответственно, коэффициента трения f (cм., например, Коэффициенты трения. Крагельский И.В., Виноградова И.Э. - М.: Машгиз, 1962, с.3), что при ограничении тормозных перегрузок приводит к существенному увеличению тормозного пути.
Задачей предлагаемого решения является снижение зависимости тормозного усилия от изменения скорости объекта торможения.
Технический результат: повышение эффективности торможения за счет обеспечения оптимального тормозного усилия, близкого к постоянному, минимальный тормозной путь.
Поставленная задача решается тем, что в тормозном устройстве, содержащем полый корпус с размещенными в нем опорами цилиндрической формы, продольные оси которых перпендикулярны продольной оси корпуса, гибкий элемент, последовательно охватывающий опоры, один из концов которого, предназначенный для соединения с объектом торможения, выведен из корпуса через сквозное осевое отверстие в одной из его торцевых поверхностей, гибкий элемент установлен с возможностью касания внутренней боковой поверхности корпуса, опоры расположены в шахматном порядке и подпружинены в направлении, перпендикулярном продольной оси корпуса, с возможностью компенсации изменения коэффициента трения скольжения взаимодействующего с ним гибкого элемента за счет изменения угла охвата цилиндрических опор гибким элементом, корпус снабжен выступами на внутренней поверхности, выполненными с возможностью направляющего воздействия на гибкий элемент при его подходе к опорам, а конец гибкого элемента, не предназначенный для соединения с объектом торможения, может быть спиралевидно уложен в корпусе.
От прототипа заявляемое техническое решение отличается тем, что гибкий элемент установлен с возможностью касания внутренней боковой поверхности корпуса, опоры расположены в шахматном порядке и подпружинены в направлении, перпендикулярном продольной оси корпуса с возможностью компенсации изменения коэффициента трения скольжения взаимодействующего с ними гибкого элемента за счет изменения угла охвата цилиндрических опор гибким элементом, корпус снабжен выступами на внутренней поверхности, выполненными с возможностью направляющего воздействия на гибкий элемент при его подходе к опорам, а конец гибкого элемента, не предназначенный для соединения с объектом торможения, может быть спиралевидно уложен в корпусе.
Размещение в полом корпусе опор цилиндрической формы, продольные оси которых перпендикулярны продольной оси корпуса, гибкого элемента, последовательно охватывающего опоры, один из концов которого, предназначенный для соединения с объектом торможения, выведен из корпуса через сквозное осевое отверстие в одной из его торцевых поверхностей, расположение опор в шахматном порядке и выполнение опор подпружиненными в направлении, перпендикулярном продольной оси корпуса, с возможностью компенсации изменения коэффициента трения скольжения взаимодействующего с ними гибкого элемента за счет изменения угла охвата цилиндрических опор гибким элементом, позволяет обеспечить оптимальное тормозное усилие, близкое к постоянному, и, соответственно, минимальный тормозной путь, а также возможность регулировки тормозного усилия.
Установка гибкого элемента с возможностью касания внутренней боковой поверхности корпуса позволяет увеличить тормозное усилие, уменьшить влияние изменения коэффициента трения на тормозное усилие, уменьшить влияние изменения коэффициента трения на тормозное усилие и, соответственно, повысить эффективность устройства.
Снабжение корпуса выступами на внутренней поверхности, выполненными с возможностью направляющего воздействия на гибкий элемент при его подходе к опорам, повышает надежность и эффективность работы устройства, за счет расчетной работы ближней к другому концу гибкого элемента опоры.
Расположение опор в шахматном порядке позволяет изменять угол охвата опор в более широком диапазоне, что существенно расширяет возможность регулировки тормозного усилия.
Спиралевидная укладка другого конца гибкого элемента в корпусе позволяет гибкому элементу равномерно разматываться при работе тормозного устройства, что повышает надежность устройства, а также точно учитывать реактивную силу вовлечения в движение этого конца гибкого элемента.
Изобретение поясняется чертежами:
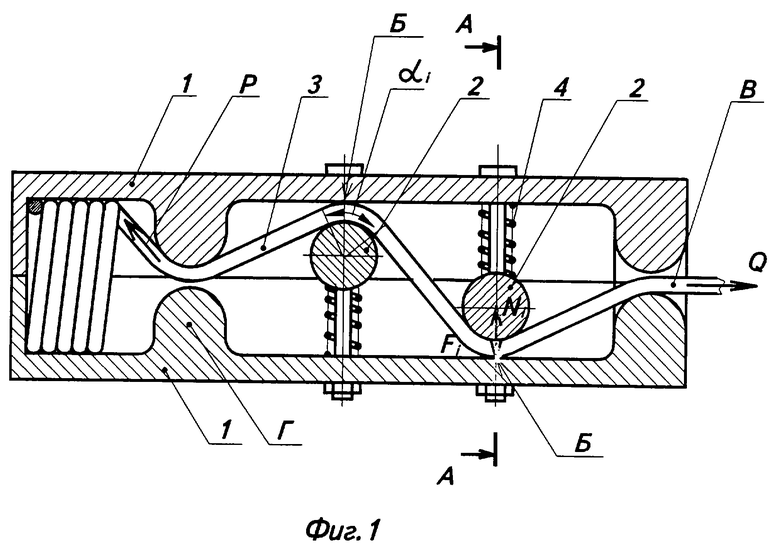
- на фиг.1 представлен продольный разрез устройства;
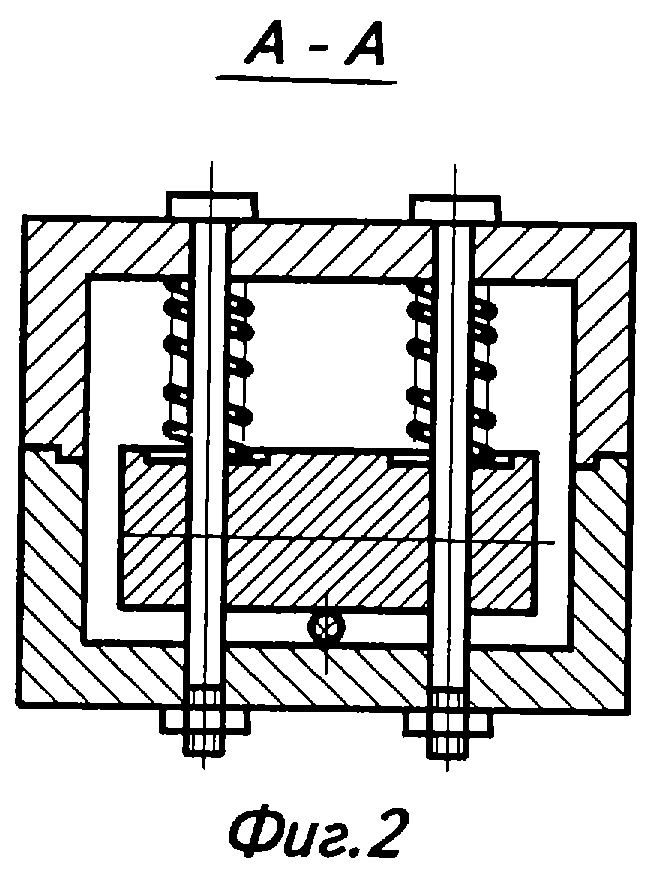
- на фиг.2 представлено поперечное сечение А-А устройства.
Устройство содержит полый корпус 1 с размещенными в нем опорами 2 цилиндрической формы, продольные оси которых перпендикулярны продольной оси корпуса 1, гибкий элемент 3, последовательно охватывающий опоры 2, один из концов (В) которого, предназначенный для соединения с объектом торможения, выведен из корпуса 1 через сквозное осевое отверстие в одной из его торцевых поверхностей. Гибкий элемент 3 установлен с возможностью касания внутренней боковой поверхности корпуса в точках Б. Опоры 2 расположены в шахматном порядке и подпружинены с помощью пружин 4 в направлении, перпендикулярном продольной оси корпуса 1, с возможностью компенсации изменения коэффициента трения скольжения взаимодействующего с ними гибкого элемента 3 за счет изменения угла охвата опор 2 гибким элементом 3. Корпус 1 снабжен выступами Г на внутренней поверхности, выполненными с возможностью направляющего воздействия на гибкий элемент 3 при его подходе к опорам 2.
Конец гибкого элемента 3, не предназначенный для соединения с объектом торможения, спиралевидно уложен в корпусе 1.
В этом устройстве усилие торможения (без учета жесткости гибкого элемента)
где α - угол охвата i-й опоры 2 гибким элементом 3;
m - погонная масса гибкого элемента;
V - скорость движения гибкого элемента;
Fi - сила прижатия гибкого элемента 3 к корпусу 1, зависящая от параметров пружины;
i - порядковый номер опоры 2.
Устройство работает следующим образом.
Предварительно осуществляется подготовка устройства к работе. Усилие Q обеспечивается назначением количества n опор и величины углов αi охвата их гибким элементом и параметрами пружин 4.
Например, при торможении происходит уменьшение скорости движения объекта торможения (на фигуре не показан) V и связанного с ним гибкого элемента 3 и, соответственно, увеличение коэффициента f, зависящего от скорости V.
В результате увеличивается тормозное усилие Q и, соответственно, результирующая сила Ni взаимодействия гибкого элемента 3 с опорой 2. При этом уменьшается сила прижатия гибкого элемента 3 к корпусу 1:

где Si - сила сжатия пружины 4,
и, соответственно, уменьшается тормозное усилие Q.
При более значительном увеличении Q работает вторая ступень регулировки. Опора 2 перемещается в направлении силы Ni, угол охвата αi опор гибким элементом уменьшается, что ведет к уменьшению усилия Q.
К уменьшению Q ведет и последовательное исключение из работы составляющей  , т.к. с увеличением Ni происходит сжатие пружины 4 и контакт гибкого элемента 3 с корпусом 1 исчезает последовательно в районе опор 2.
, т.к. с увеличением Ni происходит сжатие пружины 4 и контакт гибкого элемента 3 с корпусом 1 исчезает последовательно в районе опор 2.
Уменьшению тормозного усилия способствует уменьшение реактивной силы вовлечения в движение неподвижного спиралевидно уложенного конца гибкого элемента 3 - mV2.
С увеличением скорости объекта торможения уменьшается f и происходит обратный процесс.
Таким образом, усилие торможения автоматически поддерживается на уровне, близком к постоянному.
Предложенное устройство позволяет повысить эффективность торможения за счет обеспечения оптимального тормозного усилия, близкого к постоянному.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СПУСКА | 2001 |
|
RU2177818C1 |
| ТОРМОЗНОЕ УСТРОЙСТВО, ПОДЪЕМНИК, СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ФУНКЦИОНИРОВАНИИ ТОРМОЗНОГО УСТРОЙСТВА | 2007 |
|
RU2479479C2 |
| Колодочный тормоз нормально-замкнутого типа с автоматическим регулированием тормозного момента подъемно-транспортных машин | 1984 |
|
SU1171617A1 |
| УСТРОЙСТВО ДЛЯ ФОРМООБРАЗОВАНИЯ | 1994 |
|
RU2076010C1 |
| БЕЗОПАСНЫЕ КАЧЕЛИ | 2014 |
|
RU2567698C2 |
| УСТРОЙСТВО ДЛЯ ПОГЛОЩЕНИЯ ЭНЕРГИИ ДВИЖУЩЕГОСЯ ТЕЛА | 1997 |
|
RU2141584C1 |
| ТОРМОЗНОЕ УСТРОЙСТВО | 2010 |
|
RU2424143C1 |
| ГРАВИТАЦИОННЫЙ ТРАНСПОРТЕР ДЛЯ СПУСКА ШТУЧНЫХ ГРУЗОВ | 2001 |
|
RU2193998C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ТОРМОЖЕНИЯ И МАНЕВРИРОВАНИЯ | 2004 |
|
RU2403180C2 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2404108C1 |
Изобретение относится к машиностроению и предназначено для торможения движущихся тел. Тормозное устройство содержит полый корпус с размещенными в нем опорами цилиндрической формы, продольные оси которых перпендикулярны продольной оси корпуса, и гибкий элемент, последовательно охватывающий опоры, один из концов которого, предназначенный для соединения с объектом торможения, выведен из корпуса через сквозное осевое отверстие в одной из его торцевых поверхностей. Новым является то, что гибкий элемент установлен с возможностью касания внутренней боковой поверхности корпуса. Опоры расположены в шахматном порядке и подпружинены в направлении, перпендикулярном продольной оси корпуса, с возможностью компенсации изменения коэффициента трения скольжения взаимодействующего с ними гибкого элемента за счет изменения угла охвата цилиндрических опор гибким элементом. Корпус снабжен выступами на внутренней поверхности, выполненными с возможностью направляющего воздействия на гибкий элемент при его подходе к опорам. Конец гибкого элемента, не предназначенный для соединения с объектом торможения, спиралевидно уложен в корпусе. Техническим результатом является повышение эффективности торможения за счёт оптимизации тормозного усилия, близкого к постоянному. 1 з.п.ф-лы, 2 ил.
| Способ получения 2-хлоркротононитрила | 1977 |
|
SU650997A1 |
| ПРУЖИННЫЙ КОМПЕНСАТОР | 0 |
|
SU231268A1 |
| Успокоитель электроизмерительного прибора | 1979 |
|
SU792071A1 |
| СПОСОБ СООРУЖЕНИЯ ГРУНТОПЛЕНОЧНОГО ЭКРАНА НА КРУПНОМ КАНАЛЕ | 1991 |
|
RU2041316C1 |

