Настоящее изобретение связано с летательным аппаратом-гибридом аэродинамически самоподдерживаемого горизонтального полета с вертикальным взлетом и посадкой.
Более конкретно, изобретение связано с летательным аппаратом нового типа, способным вертикально взлетать и садиться и осуществлять аэродинамически самоподдерживаемый горизонтальный полет, все время сохраняя оптимальное положение пассажиров во время полета.
Хорошо известно, что с практической точки зрения в качестве основного преимущества летательных аппаратов с вертикальным взлетом и посадкой (ВВП) можно указать их способность вытащить кого угодно, что угодно и откуда угодно при использовании их в транспортных целях, в службах защиты окружающей среды и в государственных спасательных службах, если пока оставить в стороне вопрос о повышенных расходах, связанных с их использованием.
Этим преимуществам противостоит высокая эксплуатационная стоимость существующей ВВП-техники (особенно это относится к вертолетам) по сравнению с другими транспортными средствами.
Повышенная стоимость связана с очень большим количеством энергии, требуемой для поддержания в воздухе вертолета во время его горизонтального полета ввиду отсутствия аэродинамической поддерживающей силы неподвижных крыльев, применяемых в традиционных летательных аппаратах.
С другой стороны, этот недостаток частично компенсируется отсутствием затрат времени и финансовых средств на доставку из города в аэропорт, так как становится возможным приземляться непосредственно в центральной части города; причем вертодром занимает меньше места, чем обычный аэродром, процесс посадки упрощается, и достигается экономия времени.
Основная цель настоящего изобретения состоит в использовании возможностей летательных аппаратов с ВВП в устройстве, осуществляющем горизонтальный полет при помощи значительно более дешевых турбореактивных либо реактивных двигателей (в дальнейшем это соединение свойств условимся обозначать как ВВП-ГП - Вертикальный взлет и посадка - Горизонтальный полет).
Специалистам также известно, что уже существуют две модели летательных аппаратов, обладающие ВВП-ГП характеристиками, которые были созданы международной космической промышленностью, а именно "Harrier" и V-22 "Osprey".
"Harrier" представляет собой военный реактивный самолет, выпущенный в Великобритании совместно фирмами "British Aerospace" и "McDonnel Douglas".
V-22 "Osprey" - военный турбореактивный самолет, оборудованный наклоняемой группой “несущий винт - двигатель” и изготовленный в США компаниями "Bell Textron" и "Boeing". Уже можно ожидать появления гражданского варианта такого самолета.
В самолетах "Harrier" возможность ВВП осуществлена путем поворота вниз тягового усилия основных реактивных двигателей на стадии взлета или посадки.
Напротив, свойства ВВП-ГП самолета V-22 "Osprey" обеспечиваются путем непосредственного использования тех же основных двигателей и связанных с ними тяговых механизмов как в вертолетном режиме (при взлете и посадке), так и в качестве турбовинтовых двигателей (при горизонтальном полете), при этом основные двигатели, расположенные на концах крыльев, поворачивают (наклоняют) сверху вниз.
Тяговый механизм V-22 сконструирован как нечто среднее между большим пропеллером и несущим винтом, для того чтобы они могли работать как в турбовинтовом (ГП), так и в вертолетном (ВВП) режимах.
Оба эти решения относятся к самолетам, специально разработанным для использования в качестве устройств ВВП-ГП: когда они летят горизонтально, работают те же самые основные двигатели, мощность которых соответствует тяговому усилию, требуемому для осуществления вертикального взлета и посадки, что в результате сказывается на стоимости эксплуатации.
В патентной заявке, поданной одновременно, заявителем предложен способ переоборудования летательного аппарата с вертикальным взлетом и самоподдерживаемым горизонтальным полетом в объединенный гибридный летательный аппарат с самоподдерживаемым горизонтальным полетом и вертикальной посадкой и взлетом, который позволяет использовать ВВП-ГП-технологию для модернизации существующих летательных аппаратов.
Напротив, основной целью настоящего изобретения является создание нового гибридного летательного аппарата аэродинамически самоподдерживаемого горизонтального полета с вертикальным взлетом и посадкой (ВВП-ГП), экономичного в эксплуатации и легко приспосабливаемого для грузопассажирских перевозок и для применения в государственных спасательных службах.
Еще одной целью настоящего изобретения является создание нового летательного аппарата с вертикальным взлетом и посадкой, существенно отличающегося от существующих тем, что в нем соединены возможность ВВП и возможность экономичного самоподдерживающегося горизонтального полета на турбовинтовой или реактивной тяге.
В настоящем изобретении предложено решение нового летательного аппарата, снабженного неподвижными поддерживающими крыльями; при взлете и посадке задняя часть аппарата находится на земле, а передняя часть направлена вверх. После набора достаточной высоты в вертикальном положении летательный аппарат постепенно переходит в горизонтальное положение при помощи наклоняемых дополнительных двигателей, установленных в его задней части (при этом основной двигатель остается закрепленным), и винта (винтов) или пропеллера (пропеллеров) двойного назначения (для вертикального и горизонтального полета), закрепленного (закрепленных) на переднем конце летательного аппарата.
Таким образом, более конкретной целью настоящего изобретения является создание гибридного летательного аппарата аэродинамически самоподдерживаемого горизонтального полета с вертикальным взлетом и посадкой, содержащего движущую систему, имеющую по меньшей мере зафиксированный лопастной пропеллер или винт, расположенный в передней части летательного аппарата и присоединенный к основному (основным) двигателю (двигателям) летательного аппарата, и по меньшней мере один вспомогательный двигатель, размещенный в задней части летательного аппарата и выполненный с возможностью постепенного наклона и поворота между двумя крайними положениями, вертикальным и горизонтальным, причем кабина пилотов и пассажирский отсек выполнены в виде поворачивающихся модульных отсеков, благодаря чему непрерывно обеспечено горизонтальное положение пола и потолка параллельно земле в любой фазе полета, т.е. во время взлета, в переходной фазе и во время горизонтального полета, и обратно, а взлет летательного аппарата происходит в вертикальном положении относительно земли (передняя часть направлена вверх), и он постепенно изменяет свое положение относительно земли при помощи задних наклоняемых вспомогательных двигателей, достигая полностью горизонтального положения относительно земли, и обратно, и при посадке возвращается в вертикальное положение относительно земли.
Согласно изобретению, вышеупомянутая движущая система может быть приведена в действие посредством гидравлической системы.
Кроме того, согласно изобретению сцепление между основным двигателем (основными двигателями) и вышеупомянутым по меньшей мере одним лопастным пропеллером или винтом может быть механическим или гидравлическим, а указанный основной двигатель (основные двигатели) может быть размещен (могут быть размещены) в любом удобном месте внутри летательного аппарата.
В полном соответствии с изобретением вышеупомянутый по меньшей мере один наклоняемый вспомогательный двигатель может представлять собой по меньшей мере один реактивный или ракетный двигатель или по меньшей мере турбовентиляторный двигатель, имеющий гидравлический привод или не имеющий такового, а также любое другое подходящее средство тяги.
Далее, согласно изобретению вышеупомянутый по меньшей мере один лопастной винт выполнен таким образом, чтобы создавать с его помощью как вертикальную тягу при вертикальном положении летательного аппарата, так и горизонтальную тягу при горизонтальном положении летательного аппарата.
Наконец, согласно изобретению целесообразно иметь дополнительные наклоняемые вспомогательные двигатели для поддержки в фазе взлета и посадки и осуществления поворота и поворачивающиеся для обеспечения переходной фазы от вертикального полета к горизонтальному, и наоборот.
Далее, настоящее изобретение описано для раскрытия его сущности, но не для ограничения его объема в соответствии с предпочтительными вариантами его выполнения, с подробными ссылками на прилагаемые чертежи, на которых
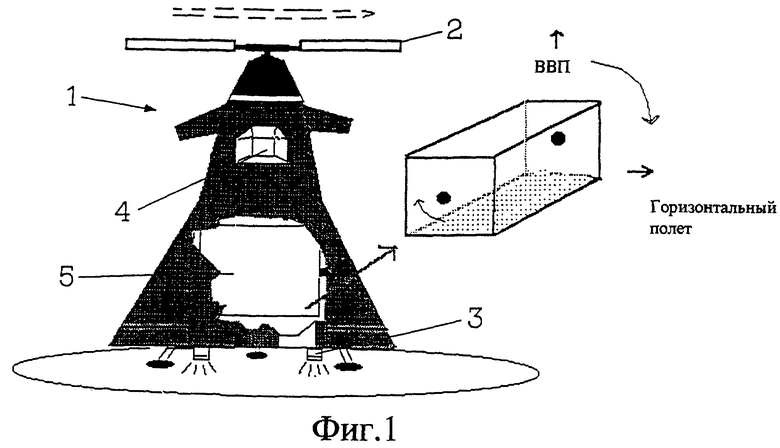
фиг.1 изображает схематический вид первого варианта выполнения предлагаемого летательного аппарата;
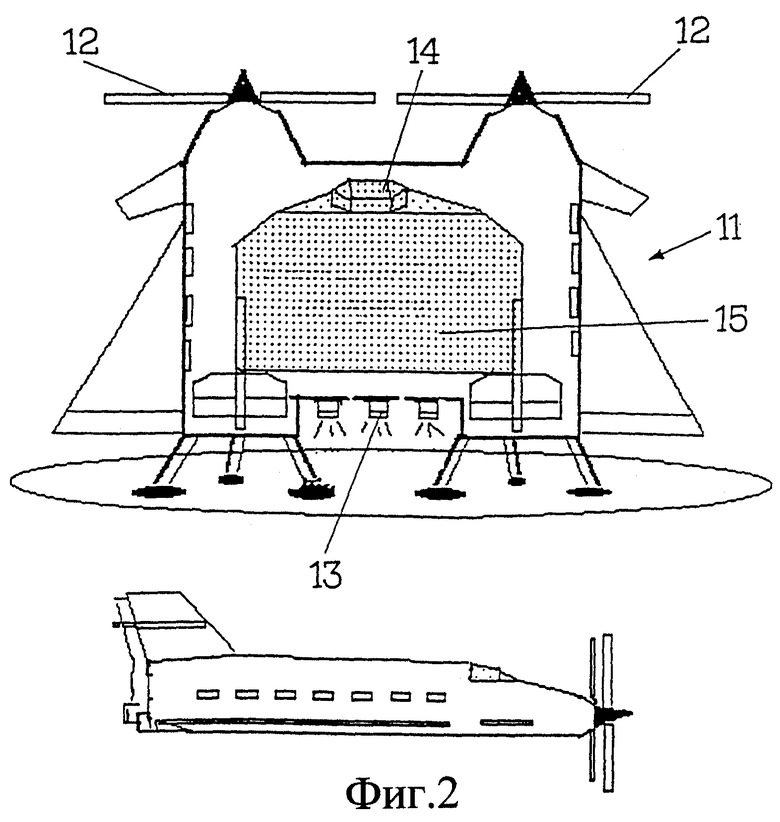
фиг.2 изображает схематический вид второго варианта выполнения предлагаемого летательного аппарата;
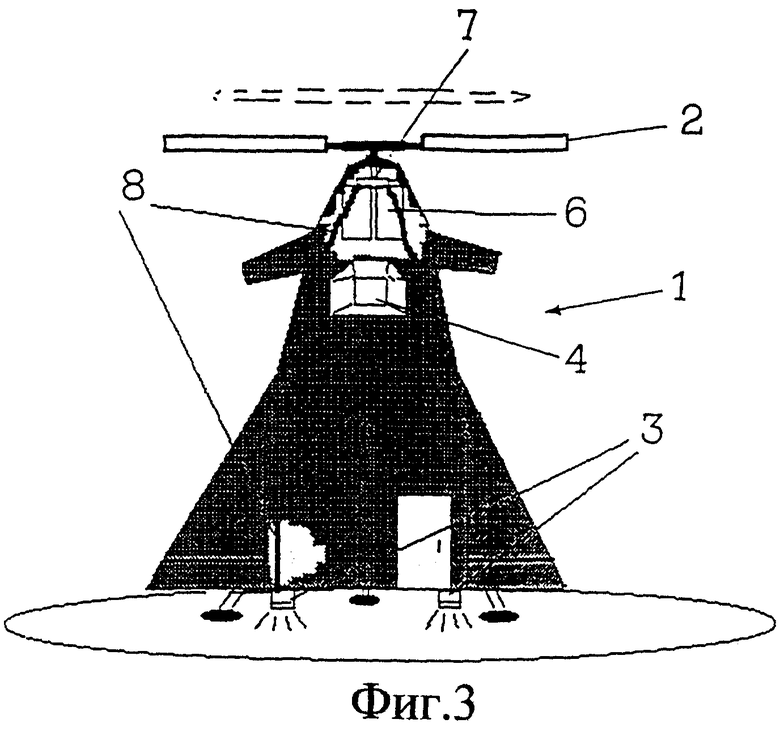
фиг.3 изображает схематический вид третьего варианта выполнения предлагаемого летательного аппарата;
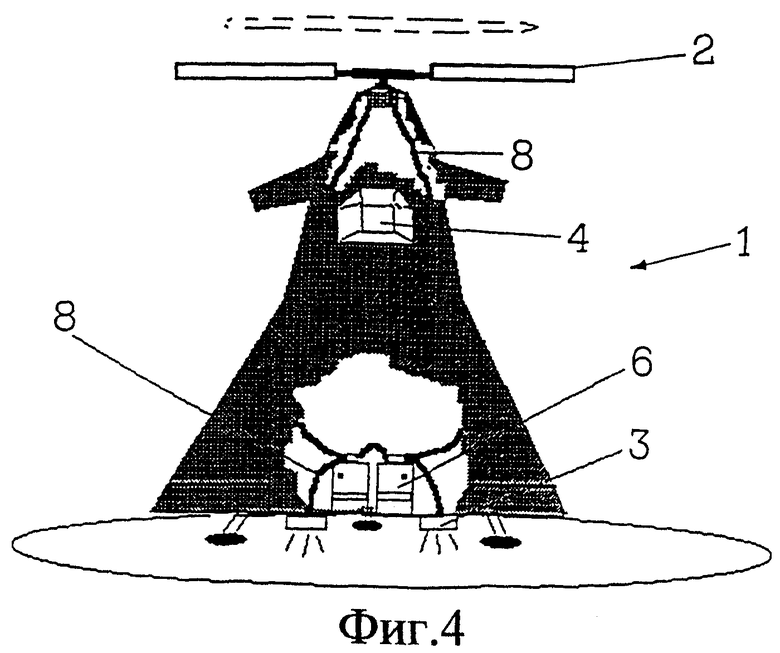
фиг.4 изображает схематический вид четвертого варианта выполнения предлагаемого летательного аппарата;
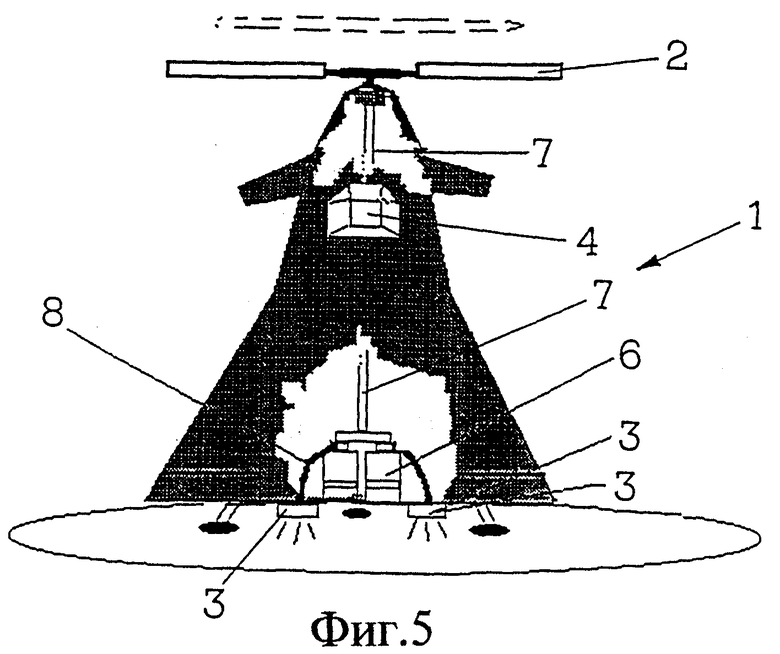
фиг.5 изображает схематический вид пятого варианта выполнения предлагаемого летательного аппарата; и
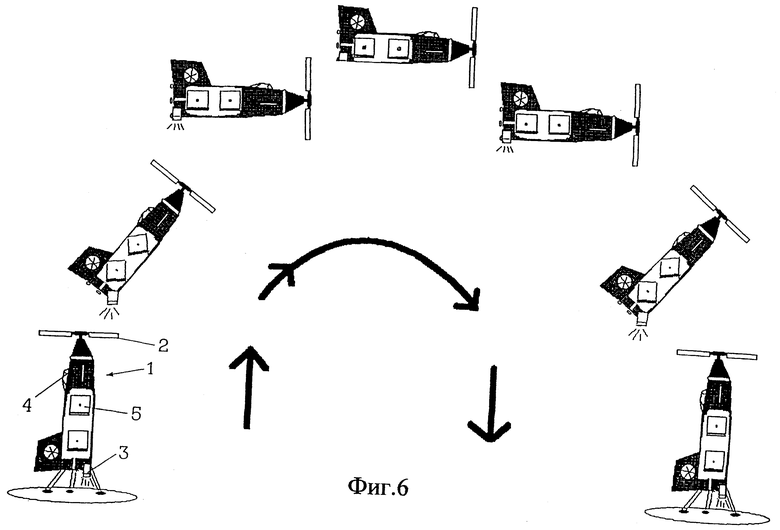
фиг.6 схематически иллюстрирует различные положения предлагаемого летательного аппарата при взлете, полете и посадке.
Фиг.1 изображает предлагаемый летательный аппарат 1, выполненный вместе с поворачивающимся грузовым модульным отсеком.
Он снабжен лопастным винтом 2, приводимым в движение непосредственно двигателем или гидравлической системой, что видно на фиг.3-5, и двумя поворачивающимися задними реактивными или турбовентиляторными двигателями 3.
Лопасти винта 2 предназначены как для создания вертикальной тяги при вертикальном положении транспортного средства, так и для создания горизонтальной тяги при горизонтальном положении транспортного средства, и они всегда остаются в одной и той же позиции.
Далее, летательный аппарат, показанный на фиг.1, оборудован поворачивающейся кабиной пилотов 4, а также грузовым модульным отсеком, предназначенным для пассажиров или грузов, который тоже способен поворачиваться.
Решение, схематически представленное на фиг.2, представляет собой пассажирский летательный аппарат 11, снабженный двумя лопастными винтами 12, также построенный таким образом, чтобы обеспечивать вертикальную тягу (взлет-посадка) и горизонтальную тягу (в условиях нормального полета).
Реактивные или турбовентиляторные двигатели 13 расположены за кабиной летательного аппарата.
За поворачивающейся кабиной пилотов 14 размещена пассажирская кабина 15, также способная поворачиваться. Очевидно, что этот вариант конструкции может быть использован и для грузоперевозок, а вариант конструкции, показанный на фиг.1, может быть использован не только для пассажирских перевозок, но и для грузовых.
Как уже сказано выше, кабина пилотов 4 или 14 и пассажирский отсек 5 или 15 летательного аппарата выполнены в виде модульных отсеков, способных поворачиваться для сохранения горизонтального положения пола и параллельного ему потолка по отношению к земле во время всех фаз полета, от взлета до перехода к горизонтальному полету, тем самым обеспечены комфортабельные условия для пилотов, пассажиров и грузов.
В варианте конструкции, показанном на фиг.3, основные двигатели 6 установлены в передней части предлагаемого летательного аппарата, а для привода винта 2 использована механическая трансмиссия 7, в то время как задние турбовентиляторные двигатели 3 соединены с основным двигателем при помощи гидравлической трансмиссии 8; также они могут быть заменены реактивными двигателями, независимыми от основных двигателей.
В варианте конструкции, показанном на фиг.4, основные двигатели 6 установлены в передней части предлагаемого летательного аппарата 1, а для привода винта 2 и задних турбовентиляторных двигателей 3, которые также могут быть заменены реактивными двигателями, независимыми от основных двигателей, использована гидравлическая трансмиссия.
Наконец, в варианте конструкции, показанном на фиг.5, основные двигатели 6 установлены в задней части предлагаемого летательного аппарата 1, а для привода винта 2 использована механическая трансмиссия 7, в то время как задние турбовентиляторные двигатели 3, которые также могут быть заменены реактивными двигателями, независимыми от основных двигателей, соединены с основным двигателем при помощи гидравлической трансмиссии 8.
Различные фазы полета летательного аппарата, соответствующего изобретению, показаны на фиг.6.
Как можно заметить, при взлете передняя часть, или нос, находится вертикально, таким образом винт 2 обеспечивает вертикальную тягу, а реактивные или турбовентиляторные двигатели 3 расположены вертикально.
Во время переходной фазы модульные отсеки 4 и 5 следуют за движением кабины, таким образом, изменение положения летательного аппарата не влияет на пилотов и пассажиров или груз. Реактивные двигатели 3 всегда остаются расположенными вертикально с направленной вниз тягой и отключаются по завершении переходной фазы полета с тем, чтобы уменьшить стоимость полета и сохранить достаточно топлива для последующей фазы посадки.
Очевидно, что те же стадии, но в обратном порядке, имеют место при переходе от горизонтального полета к вертикальному полету.
Возможность вертикального взлета и посадки (ВВП) обеспечена за счет совместного действия вертикальной тяги винта 2 ВВП с приводом от выходного вала и тяги реактивных, ракетных или турбовентиляторных двигателей 3.
Возможен также привод винта 2 ВВП от легких и эффективных гидравлических силовых цилиндров соответствующего размера, приводимых в действие гидравлической системой, с которой они соединены, и источником тяги которой являются основные двигатели, как показано на фиг.3-5.
В нижней задней части летательного аппарата установлен по меньшей мере один наклоняемый вспомогательный реактивный, ракетный (например, от радиоуправляемых ракет или самолетов-мишеней) или имеющий гидравлический привод (или не имеющий такового) турбовентиляторный двигатель 3, дополняющий тягу основного двигателя и винта 2 во время вертикального взлета и посадки.
Вышеупомянутые реактивные, ракетные или турбовентиляторные двигатели своей тягой в дальнейшем также обеспечивают переходную фазу от ВВП к ГП (и обратно).
Как следует из вышеизложенного, эксплуатационная стоимость одного часа полета предлагаемого летательного аппарата может быть не выше 90% от эксплуатационной стоимости полета турбовинтового самолета таких же размеров, так как более дорогостоящая фаза ВВП занимает не более 10% от всего времени полета.
С другой стороны, как уже рассмотрено выше, качества летательного аппарата в фазе ГП позволяют скомпенсировать увеличенную стоимость фазы ВВП.
Настоящее изобретение описано для раскрытия его сущности, но не для ограничения его объема, в соответствии с предпочтительными вариантами его выполнения, однако очевидно, что специалистами могут быть внесены различные модификации и/или изменения в пределах объема изобретения, ограниченного прилагаемой формулой изобретения.
Изобретение относится к летательным аппаратам (ЛА) с вертикальным взлетом и посадкой. ЛА 1 содержит движущую систему, имеющую лопастной пропеллер или винт 2, расположенный в передней части ЛА и присоединенный к основному двигателю ЛА, и по меньшей мере один вспомогательный двигатель 3, размещенный в задней части ЛА и выполненный с возможностью постепенного наклона и поворота между двумя крайними положениями - вертикальным и горизонтальным. Кабина пилотов 4 и пассажирский отсек 5 выполнены в виде поворачивающихся модульных отсеков, благодаря чему непрерывно обеспечено горизонтальное положение пола и потолка параллельно земле в любой фазе полета, т.е. во время взлета, в переходной фазе, во время горизонтального полета и обратно. Взлет ЛА 1 происходит в вертикальном положении относительно земли (передняя часть направлена вверх), и он постепенно изменяет свое положение относительно земли при помощи задних наклоняемых вспомогательных двигателей 3, достигая полностью горизонтального положения относительно земли, и обратно, и при посадке возвращается в вертикальное положение относительно земли. Сцепление движущей системы с основным двигателем может быть как механическим, так и гидравлическим. Изобретение позволяет снизить стоимость аппаратов вертикального взлета и посадки. 6 з.п. ф-лы, 6 ил.
| Способ нагружения корпуса судна при проведении испытаний | 2016 |
|
RU2619354C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 1994 |
|
RU2093422C1 |
| СЕТЧАТЫЙ ВЕРТИКАЛЬНЫЙ ФИЛЬТР | 2018 |
|
RU2668026C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И МЯГКОЙ ВЕРТИКАЛЬНОЙ ПОСАДКИ С ТЯГОЙ, МЕНЬШЕЙ ВЕСА | 1998 |
|
RU2152892C1 |

