Изобретение относится к воздушным перевозкам в местности, где отсутствуют взлетно-посадочные полосы (аэродромы), а имеются только (вертолетные) площадки для вертикального взлета и посадки. В настоящее время вертикальный взлет осуществляется только при условии, что тяга двигателя превышает вес летательного аппарата (ЛА).
Заявляемый ЛА имеет тягу, меньшую его веса. Но за счет изменения своей формы производит вертикальный взлет и мягкую вертикальную посадку. Для этого он подразделяется на носовой с двигателем и хвостовой (грузовой) отсеки. Вертикальный взлет (старт) ЛА осуществляется путем последовательного сообщения необходимого количества движения сначала головному отсеку, а затем всему ЛА. При посадке происходит сначала обнуление скорости хвостового отсека в момент касания им посадочной площадки, а затем за счет двигателя и скорости головного отсека в момент касания его с хвостовым. Перераспределение количества движения между отсеками осуществляется путем натяжения связующего их троса. Как при взлете (старте), так и посадке расстояние между головным и хвостовым отсеками изменяется.
По окончании старта с помощью воздушных рулей ЛА переходит в горизонтальный (самолетный) полет с использованием раскрывающегося при сближении головного и хвостового отсеков крыла, что позволяет ему в дальнейшем осуществлять как набор высоты, так и снижение. При этом расстояние между головным и хвостовым отсеками не меняется, и ЛА имеет ту же форму, что и перед стартом.
Перед совершением мягкой вертикальной посадки расстояние между головным и хвостовым отсеками сначала увеличивается, а крылья складываются. Но после посадки вертикально стоящий ЛА имеет ту же форму, что и перед стартом.
Известна система разгона, подъема, буксировки планера, связанного тросами с самолетом (вертолетом) (см. "Эксплуатация и техника пилотирования серийных планеров" (руководство). М. , ДОСААФ, 1979). Вместо тросов могут использоваться и шарнирно-стержневые соединения. В процессе разгона, подъема, буксировки длина таких соединений может изменяться. Роль головного отсека здесь играет самолет (вертолет), роль хвостового - планер. Недостатком такой системы, такого ЛА является необходимость взлетно-посадочной полосы для его взлета и посадки.
Известна система перевозки вертолетом груза, подвешенного к нему (см. Р. И. Барон, К.Н.Макаров. "Производство монтажных работ с помощью вертолетов". М. , Стройиздат, 1984). Такая система не требует взлетно-посадочной полосы и совершает вертикальный взлет и посадку. При этом длина связи между вертолетом и грузом может изменяться. Недостаток такой системы заключается в требовании превышения вертикальной тягой вертолета суммарного веса его и переносимого им груза.
Эти недостатки отсутствуют в заявляемом ЛА изменяемой формы, с тягой двигателя, меньшей веса ЛА, совершающего вертикальный взлет и мягкую вертикальную посадку. ЛА содержит снабженные воздушными рулями осесимметричные головной с воздушно-винтовым двигателем и хвостовой отсеки, объединенные осевым тросом с лебедкой, обеспечивающей заданное его натяжение, и шарнирно-стержневой системой, при стягивании тросом отсеков образующей в плане обводы треугольных крыльев. Вертикальный взлет ЛА осуществляется путем последовательного сообщения необходимого количества движения сначала головному отсеку, а затем всему ЛА. При посадке происходит сначала обнуление скорости хвостового отсека в момент касания им посадочной площадки, а затем за счет двигателя обнуление скорости и головного отсека в момент касания им приземлившегося хвостового отсека.
Как при разгоне на взлете, так и при торможении при посадке количество движения хвостового отсека изменяется в том числе и за счет использования накопленного имеющегося количества движения головного отсека. Перераспределение количества движения между отсеками осуществляется путем заданного натяжения лебедкой осевого троса, связывающего отсеки. При этом диапазон изменения расстояния L между отсеками зависит в том числе и от соотношения масс m/M головного m и хвостового М отсеков, и чем меньше это соотношение, тем больше диапазон изменения L, что может создавать конструкционные трудности при компоновке летательного аппарата. Поскольку диапазон изменения L зависит не только от формы отсеков, то технической задачей изобретения является нахождение такой изменяющейся во время полета ЛА формы отсеков, которая сокращала бы возможный диапазон изменения L. Для этого носовой и хвостовой отсеки снабжены раскрывающимися и складывающимися по заданной программе тормозными щитками, крепления которых на каждом из отсеков расположены в плоскости, перпендикулярной его оси.
После взлета головной и хвостовой отсеки ЛА при сближении, имея в общем случае разные скорости, приобретают затем одинаковую скорость, то есть происходит их стыковка. Поэтому второй технической задачей изобретения является демпфирование стыковочного удара отсеков. Для этого на головной части хвостового отсека расположено демпфирующее стыковочный удар отсеков устройство.
При горизонтальном полете состыкованных отсеков летательного аппарата его вес парируется аэродинамической подъемной силой, основная часть которой создается треугольными крыльями летательного аппарата. Поэтому третьей технической задачей изобретения является создание заполнения треугольных обводов, образующихся из шарнирно-стержневой системы при стягивании головного и хвостового отсеков. В результате этого образуется треугольное крыло. При этом обводы каждого треугольного крыла заполнены изнутри расположенными в параллельных плоскостях и шарнирно закрепленными на обводах стержневыми шарнирными параллелограммами, образующимися при стягивании отсеков из составляющих шарнирно-стержневой системы. Эти параллелограммы совместно с обводами образуют щелевое решетчатое крыло.
При взлете и посадке ЛА воздушная скорость головного отсека меняется в широких пределах и может даже изменить свой знак. Для поддержания в этих условиях наибольшей возможной тяги от воздушного винта необходимо изменять местные углы атаки на его лопастях. Этого можно достигнуть как за счет механического поворота каждой лопасти на заданный угол по программе, так и за счет изменения скорости вращения воздушного винта. Для этого благоприятно снабдить воздушный винт устройством изменения местных углов атаки на его лопастях.
Для повышения жесткости треугольного крыла благоприятно на головном и хвостовом отсеках для каждого стержневого шарнирного параллелограмма, образованного внутри обвода крыла, предусмотреть паз, в который входит свободный угол параллелограмма, ограничивая перемещение параллелограмма в направлении, перпендикулярном плоскости крыла.
Задача демпфирующего устройства заключается в рассеянии в кратчайшее время энергии стыковочного удара отсеков. При этом напряженность режима работы демпфирующего устройства понижается, если часть энергии стыковочного удара использовать для решения задачи перевода ЛА после стыковки в горизонтальный полет. Для этого благоприятно снабдить стыковочное устройство заполненным газом герметичным эластичным баллоном, при стыковке контактирующим как с головным отсеком, так и с заполненной жидким несжимаемым рабочим телом эластичной емкостью, сообщающейся с перекрытым разрушаемой мембраной и ориентированном на истечение во внешнюю среду соплом, которое вместе с емкостью закреплено у задней кромки хвостового отсека, и ось которого перпендикулярна плоскости крыльев. Реактивная сила, возникающая при истечении рабочего тела из сопла, создает дополнительный крутящий ЛА вокруг его центра тяжести момент, способствующий переводу ЛА после его стыковки в горизонтальный полет.
Уменьшение энергии стыковочного удара пропорционально расходу жидкого рабочего тела, протекающего через сопло. Поэтому демпфирующее устройство благоприятно снабдить дополнительным соплом, расположенным соосно с первым (основным), но с противоположным направлением истечения рабочего тела. При этом крутящий ЛА момент создается разностью реактивных сил, обусловленных основным и дополнительным соплами.
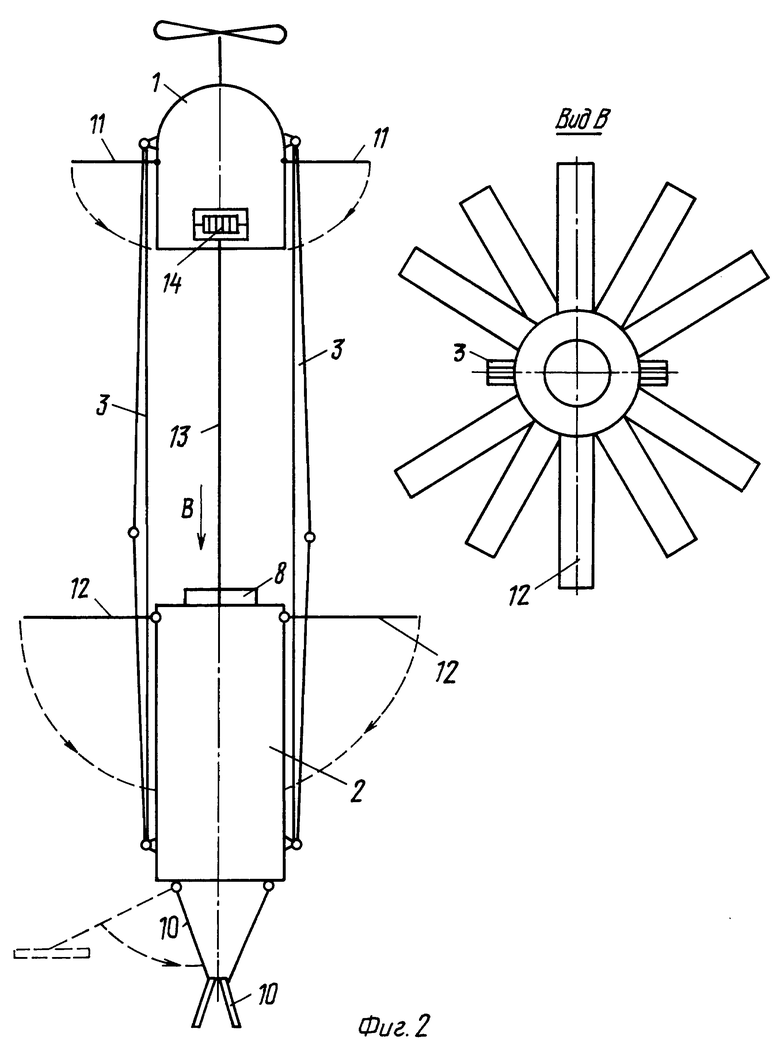
Для установки ЛА в вертикальном положении перед стартом и после посадки хвостовой отсек благоприятно снабдить раскрывающимися опорами, шарнирно прикрепленными к его задней кромке.
На фиг. 1 изображена схема летательного аппарата в состыкованном виде. На фиг.2 - схема несостыкованного ЛА. На фиг.3 - общая схема его полета. На фиг. 4 - сечение лопасти винта со схемой образования местного угла атаки на лопасти винта. На фиг.3 - схема односоплового демпфирующего устройства.
Летательный аппарат в состыкованном состоянии, представленный на фиг. 1, содержит головной 1 и хвостовой 2 отсеки, треугольное крыло 3, сформированное из обводов 4, заполненных параллелограммами 5 (DEFC), закрепленных на шарнирах D и F, со свободным углом - шарниром E. Кроме того, летательный аппарат имеет двигатель с воздушным винтом 6, воздушные рули 7, демпфирующее устройство 8, устройство 9 для изменения местных углов атаки на лопастях винта 6 и опоры 10 для установки летательного аппарата в вертикальном положении перед взлетом и после посадки.
На фиг.2 представлена схема несостыкованного ЛА с несостыкованным головным 1 и хвостовым 2 отсеками, на которой дополнительно к схеме, представленной на фиг. 1, обозначены тормозные щитки 11 головного и тормозные щитки 12 хвостового отсеков в раскрытом положении, трос 13 с лебедкой 14, а также крылья 3 в сложенном положении.
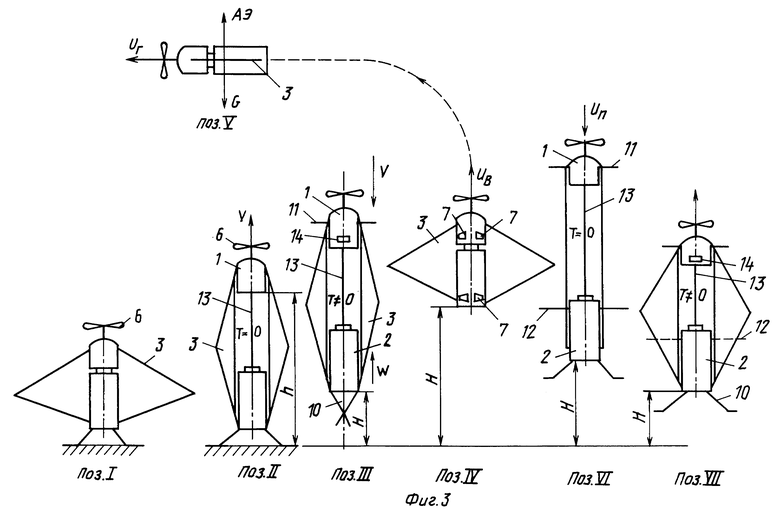
Представленное на фиг.1 и 2 устройство работает следующим образом (см. фиг.3 позиции I-VII).
В начале взлета (поз. I) ЛА находится в состыкованном виде. При запуске двигателя и начале вращения воздушного винта 6 трос 13 (поз. II) освобождается от натяжения T (T=0). Поскольку тяга винта 6 больше веса mg (g - ускорение силы тяжести) головного отсека, начинается его подъем, сопровождающийся разматыванием троса 13. При этом происходит складывание крыльев 3. После того, как головной отсек 1 набирает заданную скорость V и высоту h, лебедка 14 (поз. III) обеспечивает натяжение Т троса 13 (T≠0), большее веса Mg хвостового отсека 2, в результате чего отсек 2 начинает ускоряться, отделяясь от стартовой площадки. После этого стартовые опоры 10 складываются, а отсек 2 продолжает набирать высоту H и соответствующую скорость W. При этом головной отсек 1 испытывает торможение от воздействия на него силы T от троса 13. Поэтому его количество движения уменьшается вплоть до того, что его скорость V может изменить свой знак. В этом случае раскрываются его тормозные щитки 11. С течением времени происходит сближение отсеков 1 и 2 и вновь формируются крылья 3.
После касания отсеков 1 и 2 тормозные щитки 11 складываются, и начинается процесс стыковки, в котором каждый раз при наличии относительной скорости сближения отсеков натяжение троса 13 убирается. При изменении знака этой скорости, то есть при удалении отсеков, лебедка 14 вновь устанавливает заданные натяжения T троса 13.
В результате стыковки отсеков 1 и 2 на высоте H (поз. IV) ЛА приобретает результирующую вертикальную скорость Uв. При этом полностью раскрываются крылья 3, приобретая свою стартовую форму (поз. I). После этого с помощью воздушных рулей 7 ЛА переходит в горизонтальный полет (поз. V), у него устанавливается горизонтальная скорость Uг, и вес (m+M)g летательного аппарата в основном компенсируется аэродинамической силой АЭ. При этом ЛА может осуществлять набор высоты, снижение, изменение курса полета. Трос 13 при этом находится в натянутом состоянии.
Перед посадкой ЛА совершает вертикальный маневр с кабрированием. После достижения вертикального положения (поз. VI), натяжение троса 13 обнуляется, вследствии чего отсеки 1 и 2 вновь начинают расходиться, раскрываются тормозные щитки 11 и 12 и ЛА приобретает скорость Uп сближения с посадочной площадкой. На заданной высоте H лебедка 14 обеспечивает заданное натяжение троса 13 (поз. VII), благодаря чему происходит торможение и мягкая вертикальная посадка отсека 2 на выпущенные опоры 10, после чего натяжение Т троса 13 вновь обнуляется. Затем за счет регулирования тяги винта 6 осуществляется и мягкая посадка головного отсека 1 на хвостовой 2, в результате чего ЛА приобретает ту же форму, что и перед взлетом (поз. I). После касания отсеков 1 и 2 трос 13 снова получает заданное натяжение T.
Примечание. Обоснование возможности совершения ЛА мягкой вертикальной посадки.
Как уже отмечено выше, ЛА кабрирует, его продольная ось принимает вертикальное положение. После этого происходит обнуление натяжения троса (T=0), который начинает разматываться под влиянием тяги двигателя головного отсека. Отсеки начинают расходиться по высоте. Раскрываются их тормозные щитки. По окончании разматывания троса на длину Lmax расстыкованный ЛА начинает как целое снижаться, выходя на вполне определенную скорость парашютирования Uп.
При достижении хвостовым отсеком расчетной заданной высоты H при скорости парашютирования Uп лебедкой устанавливается заданное постоянное натяжение T1 троса, большее веса Gхв хвостового отсека, благодаря чему в течение промежутка времени t* осуществляется мягкая вертикальная посадка хвостового отсека. Значение H определяется из условий
Hхв(t*)=Vхв(t*)-0 (1)
где Hхв(t) и Vхв(t) - значение высоты и скорости хвостового отсека в текущий момент t<t*, которые находятся из системы управлений
при начальных условиях Hхв(0)-H, Vхв(0)=-Uп, причем
где M - масса хвостового отсека,
Sмид - площадь его миделя,
cх - коэффициент "лобового" сопротивления хвостового отсека с раскрытыми тормозными щитками,
ρ - стандартная плотность атмосферы у поверхности земли,
g - ускорение силы тяжести у поверхности земли.
При T1 = const уравнения Риккати (2) легко интегрируются:

Однако условий (1) недостаточно для определения T1 > Gхв, так как помимо осуществления мягкого вертикального приземления хвостового отсека происходит и мягкая вертикальная посадка головного отсека на приземлившийся хвостовой. А при этом следует учитывать, что на головной отсек также действует натяжение T1 троса.
Траектория головного отсека на этапе мягкой вертикальной посадки ЛА состоит из двух частей:
1. движение при T1(t<t*)>Gхв, то есть до приземления хвостового отсека, и
2. движение при T1(t>t*)=0, то есть после приземления хвостового отсека, когда натяжение троса обнуляется.
По окончании первой части своей траектории головной отсек приобретает скорость V2(t*) на высоте H2(t*). Эта скорость и высота находятся из уравнений

при начальных условиях
V2(0)=-Uп, H2(0)=H+Lmax+lхв
где обозначено P - тяга двигателя,
m - масса головного отсека, - коэффициент "лобового" сопротивления головного отсека с раскрытыми тормозными щитками,
- коэффициент "лобового" сопротивления головного отсека с раскрытыми тормозными щитками,
lхв - длина хвостового отсека,
H - высота нижнего торца хвостового отсека в момент начала его мягкой вертикальной посадки (в момент начала натяжения T1 ≠ 0 троса).
При этом длина троса
L(t*) = H2(t*) - lхв >0
в момент t=t* мягкого вертикального приземления хвостового отсека, конечно, больше нуля.
По окончании второй части своей траектории в момент времени tок > t* окончания мягкой вертикальной посадки на приземлившийся хвостовой отсек головной отсек приобретает скорость и высоту
V2(tок)=0
H2(t*<t<tок)>lхв; H2(tок)=lхв, (3)
которые находятся из уравнений

при начальных условиях
V2(t*), H2(t*)=lхв+L(t*),
которые, естественно, являются конечными из первой части траектории головного отсека. Для "точного" достижения условий (3) используется необходимое регулирование тяги P.
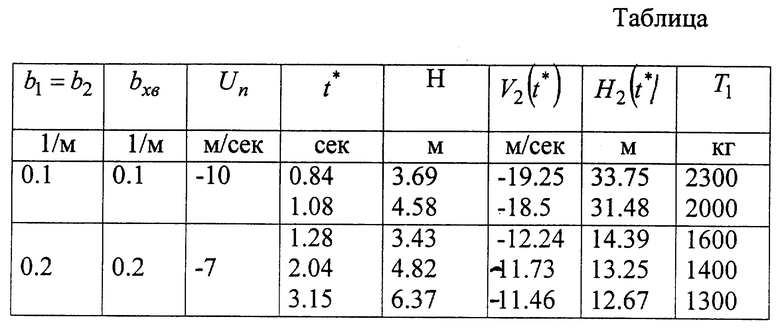
Для подтверждения возможности реализации заявленной схемы мягкой вертикальной посадки ЛА проведено математическое моделирование этапа мягкой посадки при различных параметрах ЛА. Так, например, при Gхв=1200 кг, Gгол= mg= 800 кг, Pmax=1200 кг, lхв=6 м, Lmax=45 м мягкая вертикальная посадка ЛА осуществляется при значениях, представленных в таблице.
Во всех, приведенных в таблице вариантах, условия (3) выполняются.
Конец примечания.
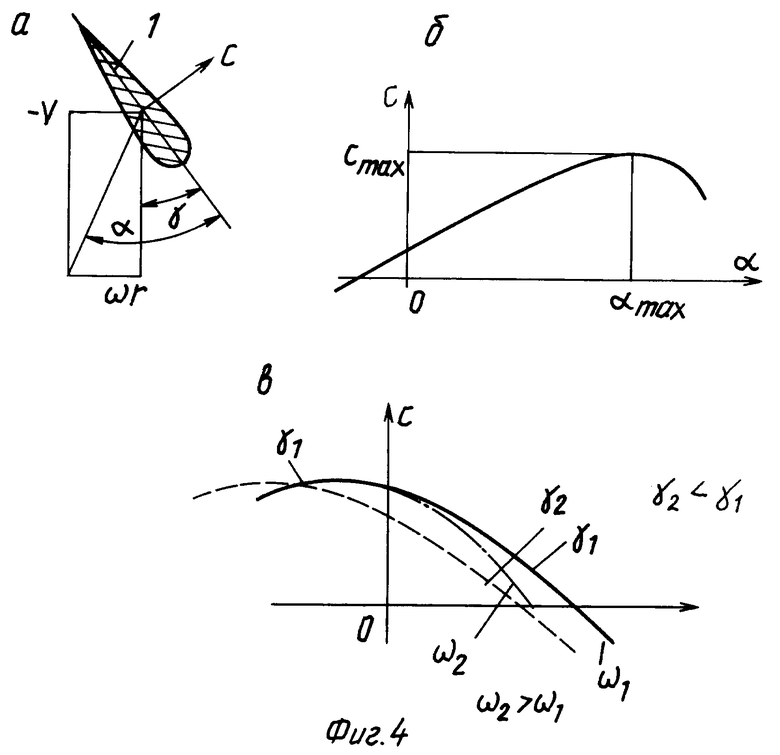
На фиг. 4а представлены расположенное на расстоянии r от оси воздушного винта 6 сечение 1 какой-либо его лопасти и схема обтекания этого сечения воздушным потоком, причем через γ обозначен угол установки лопасти. При этом здесь ω - угловая скорость вращения винта (лопасти), V - отрицательная (для определенности) линейная скорость отсека 1, α - результирующий местный угол атаки сечения 1, c - коэффициент подъемной силы профиля сечения 1.
На фиг.4б представлена типовая зависимость коэффициента C подъемной силы от α. Через αmax обозначено значение α, при котором коэффициент C достигает своего наибольшего значения.
На фиг.4в представлена зависимость коэффициента C от скорости V, угла γ и угловой скорости ω вытекающая из схем фиг.4а и фиг.4б.
Для поддержания наибольшего значения Cmax коэффициента C устройство 9 (фиг. 1) для изменения местных углов атаки на лопастях воздушного винта с целью получения α, близкого к αmax (фиг.4б), может поворачивать на заданный угол γ всю лопасть винта или изменять угловую скорость ω вращения винта.
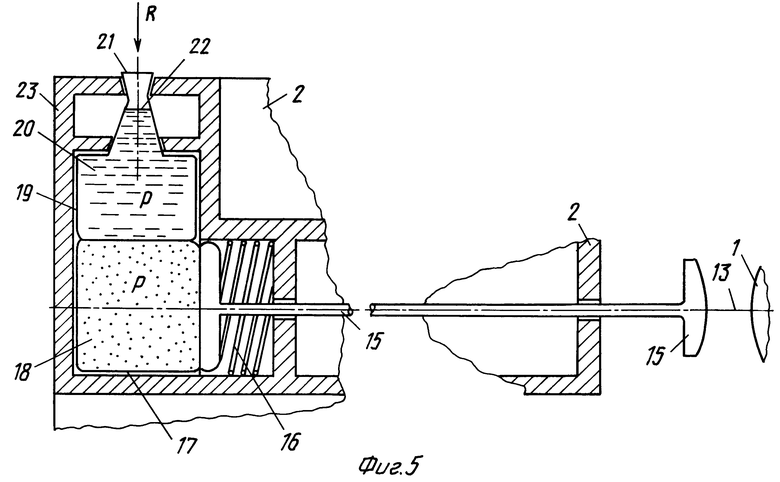
На фиг. 5 представлена схема односоплового демпфирующего устройства, которая содержит нажимной шток 15, фиксируемый поджатой пружиной 16, герметичный эластичный баллон 17, заполненный газом 18, эластичную емкость 19, заполненную несжимаемым жидким рабочим телом 20, а также сопло 21, перекрытое разрушаемой мембраной 22.
Устройство работает следующим образом.
После касания отсеком 1 (фиг.5) штока 15 натяжение троса 13 обнуляется. При нарастании давления отсека 1 на шток 15 он перемещается, передавая это давление на эластичный баллон 17, который, деформируясь, транслирует это давление на емкость 19, в результате чего повышается давление P в газе 18 и жидком рабочем теле 20. При превышении давлением P заданного значения P3 разрушается мембрана 22 и рабочее тело 20 через сопло 21 начинает вылетать во внешнюю среду, создавая реактивную силу R. После каждого погашения относительной скорости сближения отсеков 1 и 2 и начале нового расхождения отсеков в процессе стыковки трос 13 снова получает заданные натяжения T.
Поскольку ось сопла 21 перпендикулярна плоскости крыльев ЛА, то реактивная сила R совместно с его воздушными рулями создает момент, который еще до окончания процесса стыковки начинает вращать ДА, переводя его в горизонтальное "самолетное" положение, ставя его "на крыло".
Замечание. Наличие емкости 19 с жидким несжимаемым рабочим телом 20 и сопла 21 позволяет снизить наибольшее давление Pmax в газе 18 баллона 17 по сравнению с тем, которое возникло бы при отсутствии 19, 20 и 21. Этому также способствует обнуление натяжения T троса 13 (T=0) при сближении отсеков 1 и 2 в процессе стыковки.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННЫЙ ВЕРТОЛЕТ | 1994 |
|
RU2089456C1 |
| САМОЛЕТ-ЗАПРАВЩИК | 1994 |
|
RU2100257C1 |
| СПОСОБЫ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И ВЗЛЕТНО-ПОСАДОЧНАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2010 |
|
RU2466913C2 |
| АВИАЦИОННЫЙ КОМПЛЕКС ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2014 |
|
RU2582743C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ И/ИЛИ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ С УКОРОЧЕННЫМ ПРОБЕГОМ | 2021 |
|
RU2764311C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| САМОЛЕТ-ЗАПРАВЩИК | 1994 |
|
RU2142897C1 |
| ИНДИВИДУАЛЬНЫЙ СКЛАДЫВАЮЩИЙСЯ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1991 |
|
RU2094318C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2619976C2 |
| Модульный летательный аппарат и способ его вертикального взлёта | 2021 |
|
RU2777132C1 |
Изобретение относится к авиации. Летательный аппарат содержит осесимметричные головной (1) с воздушно-винтовым двигателем и хвостовой (2) отсеки с воздушными рулями (7). Они объединены тросом с обеспечивающей заданное его натяжение лебедкой. Имеется шарнирно-стержневая система, при стягивании отсеков образующая в плане обводы (4) треугольных крыльев (3). Отсеки имеют раскрывающиеся и складывающиеся тормозные щитки, крепления которых на каждом отсеке расположены в плоскости, перпендикулярной его оси. На головной части хвостового (2) отсека расположено демпфирующее стыковочный удар отсеков устройство (8). Обводы (4) каждого треугольного крыла (3) заполнены изнутри расположенными в параллельных плоскостях и шарнирно закрепленными на обводах стержневыми шарнирными параллелограммами (5), образующими совместно с обводами щелевое решетчатое крыло. Изобретение позволяет производить взлет и посадку при тяге, меньшей веса, а также плавно состыковывать отсеки. 5 з.п. ф-лы, 5 ил. 1 табл.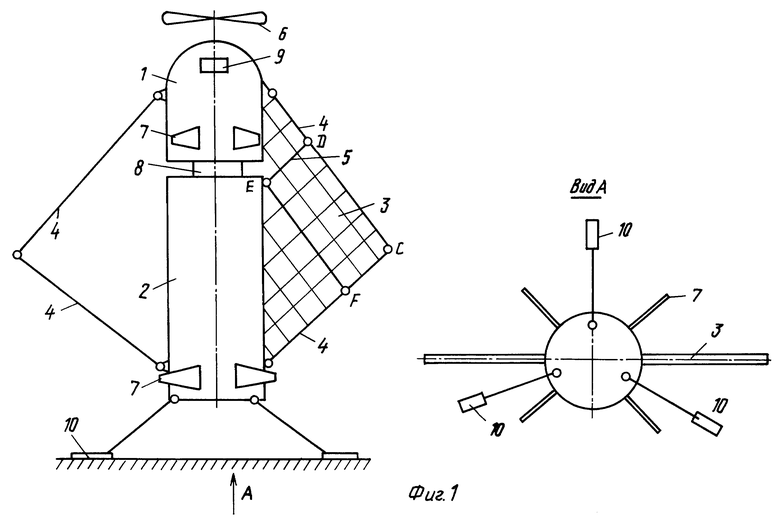
| Система внешней подвески груза квертолету | 1973 |
|
SU509495A1 |
| Прецизионный перфоратор | 1975 |
|
SU568548A1 |
| Гидроэлектрический молот | 1983 |
|
SU1199406A1 |
| РАКЕТА С НОРМАЛЬНОЙ АЭРОДИНАМИЧЕСКОЙ СХЕМОЙ | 1995 |
|
RU2085825C1 |
