Изобретение относится к технике автономного измерения вектора скорости движущегося объекта. Оно может использоваться в различных областях науки и техники: преимущественно в системах автономного управления и навигации космических кораблей; в системах автономного управления и навигации самолетов, морских судов; для измерения вектора скорости морских и воздушных течений; для точного измерения вектора скорости Земли и отдельных точек на ее поверхности при движении Земли по орбите и в других случаях.
Известен способ автономного измерения скорости с использованием астрономических средств, состоящий в том, что о скорости объекта судят по скорости изменения угловых координат наблюдаемых звезд. Однако, этот способ имеет малую точность измерений скорости и по своему принципу действия может использоваться только на движущихся объектах, находящихся на поверхности Земли или вблизи нее, он не может использоваться в космосе.
Изобретение основано также на использовании астрономических средств, но на новом физическом принципе автономного измерения скорости, не используемом до него. По этой причине оно не имеет прототипа - близкого по технической сути аналога.
Физической основой изобретения является точное измерение частоты излучений звезд, галактик и смещения этих частот, вызываемых движением объекта (приемника). В дальнейшем употребляется термин “звезда”, при этом имеется ввиду и возможность использования излучений галактик.
Физический принцип изобретения состоит в следующем. Скорость перемещения объекта по направлению наблюдаемой звезды вызывает смещение частоты принимаемого излучения, определяемого по формуле (1) (вывод формулы дан в конце описания).
Здесь:
V - вектор скорости объекта по направлению наблюдаемой звезды (по линии объект - звезда),
Δƒ=ƒ-ƒ0 - смещение частоты излучения от наблюдаемой звезды, измеряемое в процессе движения объекта,
ƒ - частота, измеряемая во время движения объекта,
ƒ0 - значение частоты излучения от наблюдаемой звезды, измеренное перед началом движения объекта,
С - скорость света.
Знак “+” соответствует движению объекта к звезде, знак “-” соответствует движению от звезды.,
Вектор V является проекцией вектора скорости объекта на направление наблюдаемой звезды. Точка пересечения трех плоскостей, проходящих через концы трех таких векторов перпендикулярно направлениям на звезды, является точкой конца вектора скорости объекта. С помощью математических расчетов находятся параметры этого вектора в выбранной системе координат. Для определенности в дальнейшем берется прямоугольная система координат с началом в точке старта (начала движения) объекта.
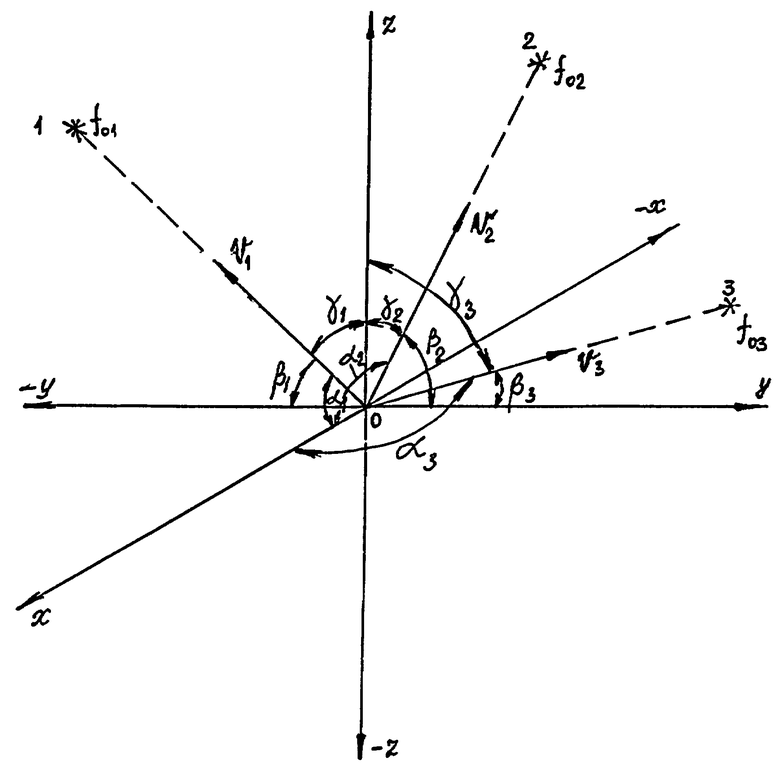
На фиг.1 представлена прямоугольная система координат с осями OX, OY, OZ.
На фиг.1 обозначены:
1, 2, 3 - выбранные для наблюдения звезды;
ƒ01, ƒ02, ƒ03 - частоты принимаемых излучений соответственно от 1, 2, 3 звезды, измеренные перед стартом;
α1, β1, γ1 - угловые координаты 1-й звезды, измеренные перед стартом;
α2, β2, γ2 - то же, для 2-й звезды;
α3, β3, γ3 - то же, для 3-й звезды;
V1, V2, V3 - векторы скорости объекта соответственно по направлениям 1, 2, 3 звезды, определяемые по правилам:
Здесь:
Δƒ1, Δƒ2, Δƒ3 - смещение частот принимаемых излучений соответственно от 1, 2, 3 звезды.
При осуществлении изобретения выполняют следующие действия.
До начала движения выбирают систему координат, удобную для пользователя (ниже, как уже отмечалось, изложение ведется применительно к прямоугольной системе координат с началом в точке старта); выбирают три звезды, излучения которых будут использоваться для измерения скорости; одна из координатных осей может быть совмещена с направлением на одну из звезд, две другие звезды выбирают ближе к другим координатным осям, что упрощает расчеты и расширяет возможности для траекторного маневра при наличии конструктивных ограничений для наблюдения за выбранными звездами; измеряют (или определяют по каталогам) угловые координаты выбранных звезд на момент старта; принимают излучения выбранных звезд; выбирают по одной спектральной линии из излучений каждой выбранной звезды (для дублирования в целях повышения надежности спектральных линий может браться несколько); измеряют на момент старта частоты спектральных линий; фиксируют время старта и географические координаты точки старта (при необходимости по этим данным определяется начальная скорость объекта относительно мирового пространства, равная скорости точки старта в момент начала движения).
После начала движения (старта) измеряют текущие значения частот ƒ1, ƒ2, ƒ3 соответственно от 1, 2, 3 наблюдаемой звезды; находят смещение частот
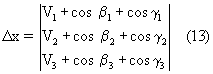
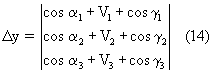
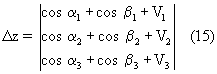
вычисляют по формулам (2), (3), (4) величины V1, V2, V3; определяют проекции вектора скорости объекта на координатные оси по формулам:



где
- определитель системы уравнений пересекающихся плоскостей, упомянутых выше (формула (12))
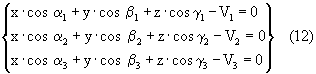
решение которой является координатами точки конца вектора скорости объекта
- определяют величину модуля вектора скорости по формуле

- определяют направляющие косинусы вектора скорости по формулам:
Задача изобретения решена.
Возможность осуществления способа и достижения цели изобретения определяется достижимой точностью измерения частоты излучений звезд, точностью определения угловых координат звезд до начала движения объекта, возможностью вычислений по формулам (2)-(19), кроме (12).
Ошибки измерения угловых координат звезд до начала движения астрономическими приборами составляют доли угловых секунд. Их влиянием на точность определения скорости объекта, как и влиянием ошибок, вносимых вычислениями, можно пренебречь, ввиду их малости. С учетом этого, ошибка измерения скорости по способу изобретения определяется как полный дифференциал, найденный из формулы (1)
Здесь:
δV0 - ошибка измерения скорости объекта,
δƒ0 - ошибка измерения частоты до начала движения,
δ(Δƒ) - ошибка измерения смещения частоты в ходе движения,
δС - ошибка определения скорости света.
Можно считать δf=δ(Δƒ), т. к. для измерений той и другой величины могут использоваться одни и те же технические средства. В выражении (20) справедливы соотношения
Существующие атомные эталоны частоты обеспечивают измерения частот с относительной точностью 10-11-10-12, измерители с использованием эффекта Мессбауэра могут обеспечить относительную точность порядка 10-16 (см. Н.И.Карякин и др. Краткий справочник по физике. М.: Высшая школа, 1969).
Таким образом, достижимая точность измерения скорости при использовании изобретения составляет 3 (10-3-10-4) м/с, изобретение в настоящее время реализуемо и обеспечивает высокую точность измерения вектора скорости движущегося объекта.
ВЫВОД ФОРМУЛЫ (1)
Свет, излученный звездой, галактикой является формой существования единой массо-энергетической субстанции. Под термином “свет” здесь понимается весь частотный спектр излучения звезды, галактики.
В пространстве распространяющийся свет образует материальную структуру - пространственную волну.
Частота принимаемого света является частотой воздействия пространственной волны на приемник. Она определяется пространственной длиной волны и величиной скорости взаимного перемещения волны и приемника.
При отсутствии движения приемника (объекта) частота излучения равна

При наличии движения частота равна
Здесь:  - время прохождения волной относительно приемника расстояния, равного длине волны, соответственно при отсутствии и наличии движения;
- время прохождения волной относительно приемника расстояния, равного длине волны, соответственно при отсутствии и наличии движения;
V, С - скорость объекта, скорость света соответственно;
λ0 - длина пространственной волны.
Разность частот (частотный сдвиг) равна

Откуда находится формула, устанавливающая связь между скоростью и частотным сдвигом
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОНОМНОГО ИЗМЕРЕНИЯ ВЕКТОРА УГЛОВОЙ СКОРОСТИ | 2005 |
|
RU2282826C1 |
| СПОСОБ АВТОНОМНОГО ИЗМЕРЕНИЯ ВЕКТОРОВ СКОРОСТИ И УСКОРЕНИЯ | 2004 |
|
RU2331890C2 |
| СПОСОБ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ | 2004 |
|
RU2282154C1 |
| СПОСОБ НАВИГАЦИИ КОСМИЧЕСКОГО АППАРАТА ПО НЕБЕСНЫМ ИСТОЧНИКАМ ПЕРИОДИЧЕСКОГО ИЗЛУЧЕНИЯ | 2011 |
|
RU2453813C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ С АВТОНОМНОЙ КОРРЕКЦИЕЙ ЭФФЕКТА АБЕРРАЦИИ СВЕТА | 2019 |
|
RU2723199C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ И САМОНАВЕДЕНИЯ ПОДВИЖНОГО НОСИТЕЛЯ И БОРТОВАЯ СИСТЕМА САМОНАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2303229C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2020 |
|
RU2735289C1 |
| Способ автономной навигации для объекта космического назначения | 2018 |
|
RU2727784C2 |
| Способ астроинерциальной ориентации и устройство для его осуществления | 2022 |
|
RU2836748C2 |
| СПОСОБ ОБЗОРА НЕБЕСНОЙ СФЕРЫ С КОСМИЧЕСКОГО АППАРАТА ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И КОСМИЧЕСКАЯ СИСТЕМА ОБЗОРА НЕБЕСНОЙ СФЕРЫ ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И ОБНАРУЖЕНИЯ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ, РЕАЛИЗУЮЩАЯ УКАЗАННЫЙ СПОСОБ | 2012 |
|
RU2517800C1 |
Изобретение основано на измерении частоты излучений звезд и частотных сдвигов, вызываемых движением приемника (объекта) по направлениям наблюдаемых звезд. При осуществлении способа до старта выбирают систему координат, удобную для пользователя, выбирают три звезды, измеряют их угловые координаты, измеряют частоты выбранных спектральных линий из спектров излучений звезд. После старта измеряют смещение частот, по их значениям вычисляют скорости движения по направлениям звезд, по этим скоростям и угловым координатам звезд находят координаты точки конца вектора скорости объекта как точки пересечения трех плоскостей, проходящих ортогонально направлениям на звезды через концы векторов скорости по этим направлениям. По найденным координатам определяют величину модуля и направление вектора скорости в любой системе координат. Для прямоугольной системы координат с началом в точке старта расчеты модуля и направляющих косинусов вектора скорости осуществляют по формулам. Техническим результатом является высокая точность измерения вектора скорости движущегося объекта. 3 з.п. ф-лы, 1 ил.
Δƒ1=ƒ1-ƒ01,
Δƒ2=ƒ2-ƒ02,
Δƒ3=ƒ3-ƒ03,
по этим смещениям определяют проекции вектора скорости на прямые, соединяющие движущийся объект и выбранные звезды по формулам

и по найденным проекциям определяют вектор скорости объекта в выбранной системе координат, для прямоугольной системы координат определяют модуль вектора скорости и направляющие косинусы по формулам


где f1, f2, f3 - текущие значения частот излучений от 1-й, 2-й и 3-й наблюдаемых звезд, соответственно;
f01, f02, f03 - частоты излучений от 1-й, 2-й и 3-й наблюдаемых звезд, соответственно, измеренные перед стартом;
Δf1, Δf2, Δf3 - смещение частот принимаемых излучений от 1-й, 2-й и 3-й наблюдаемых звезд, соответственно;
V1, V2, V3 - векторы скорости объекта по направлениям 1-й, 2-й и 3-й звезды, соответственно;
α1, β1, γ1 - угловые координаты 1-й звезды, измеренные перед стартом;
α2, β2, γ2 - то же для 2-й звезды;
α3, β3, γ3 - то же для 3-й звезды.
| JP 60070380 а, 22.04.1985 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ, СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ, ДАЛЬНОСТИ И ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ НАВИГИРУЮЩИМСЯ ОБЪЕКТОМ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2152048C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ЦЕЛИ | 1997 |
|
RU2143099C1 |
| US 6336060 В1, 01.01.2002. | |||

