Изобретение относится к технике автономного измерения вектора угловой скорости движущегося объекта. Оно может использоваться в различных областях науки и техники, преимущественно в системах автономного управления и навигации космических аппаратов, воздушных аппаратов, ракет.
Способ автономного измерения вектора угловой скорости основан на измерении изменений линейной скорости движущегося объекта по направлениям 3-х выбранных звезд, получаемых с помощью измерителей, вынесенных из центра вращения объекта.
Существующие способы измерения угловой скорости основаны на измерении отклонений от опорных направлений, создаваемых, например, осями гироскопа или от направлений на внешние объекты.
Ввиду новизны физической основы, предложенный способ не имеет прототипа - ближайшего по технической сути аналога.
Предложенный способ обладает высокой точностью измерений, высокой чувствительностью по обнаружению начала несанкционированных вращений, решает задачу измерения угловой скорости одним и тем же составом аппаратуры, что и способы автономного измерения вектора линейной скорости (патент №2227302, заявка на изобретение, регистрационный №2004117733) и способ пространственной ориентации и стабилизации, заявка на изобретение №2004134757/28(037811). Движение измерителя при вращении объекта вызывает изменение измеряемой линейной скорости по направлению наблюдаемой звезды. Это изменение при равномерном вращении объекта происходит по синусоидальному закону с амплитудой и фазой, определяемой координатами точки нахождения приемника на объекте. Частота колебаний синусоиды пропорциональна угловой скорости вращения объекта.
В общем случае угловая скорость вращения твердого тела есть вектор ω, численно равный первой производной от угла поворота ϕ по времени

и направленный вдоль оси вращения таким образом, чтобы из его конца вращение тела было видно происходящим против часовой стрелки.
Проекции вектора ω на направления 3-х взятых для измерения звезд (в дальнейшем - навигационные звезды) определяются следующим образом:

Здесь ν - линейная скорость приемника по направлению навигационной звезды, обусловленная вращением объекта,
tи - интервал времени между двумя соседними измерениями скорости,
d - расстояние между приемником и центром вращения объекта.
Практически всегда выполняется условие νtи≪d, следовательно, справедливо равенство tgϕ=ϕ,
Измерители линейной скорости по направлениям навигационных звезд определяют суммарную скорость, складывающуюся из «плановой» скорости движения объекта по траектории νtr и скорости, вызванной вращением ν. Ввиду того, что νtr известна и прогнозируема, скорость, вызванная вращением объекта, определяется как
ν=νи-νtr,
где νи - измеряемая скорость.
Изменения линейной скорости по направлениям соответственно 1-й, 2-й и 3-й навигационных звезд, вызванные вращением объекта, определяются как

где  ,
,  ,
,  - измеряемые скорости по направлениям соответственно 1-й, 2-й и 3-й навигационных звезд,
- измеряемые скорости по направлениям соответственно 1-й, 2-й и 3-й навигационных звезд,
 ,
,  ,
,  - "плановые" траекторные скорости по тем же направлениям.
- "плановые" траекторные скорости по тем же направлениям.
Критерием обнаружения вращения объекта служит превышение величиной ν заданного порога ν≥νп. Здесь νп - пороговое значение изменения линейной скорости, определяемое из условий полета.
При расположении приемников, отслеживающих навигационные звезды, в одной точке на объекте или на близком расстоянии друг от друга так, что ошибками, вносимыми их пространственным разносом можно пренебречь, и при одновременном измерении по всем трем направлениям проекции вектора ω на направления звезд определяются формулами

В общем случае, при размещении измерителей скоростей по направлениям навигационных звезд в произвольных точках на объекте возможно сведение показаний измерителей к одной точке путем расчета поправок. Однако математический аппарат такого расчета сравнительно громоздок, поэтому с целью упрощения изложения рассматривается только вариант размещения измерителей на небольших удалениях друг от друга, существенно не влияющих на точность определения вектора ω, о чем говорилось выше. Тем более что такой вариант размещения приемников технически реализуем и по многим соображениям предпочтителен.
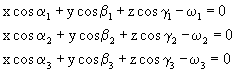
По проекциям вектора ω на направления звезд определяют конец этого вектора в мировой прямоугольной системе координат (в дальнейшем - прямоугольная система координат) как точку пересечения трех плоскостей, проходящих через концы проекций перпендикулярно направлениям на звезды. Начало системы координат - в точке начала движения (старта). При необходимости используется «объектовая» система отсчета путем переноса начала отсчета в точку нахождения движущегося объекта.
Система уравнений пересекающихся плоскостей имеет вид
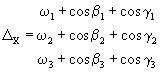
Проекции вектора ω на оси прямоугольной системы координат определяют по формулам

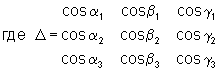
• - определитель систем уравнений пересекающихся плоскостей,
a α1, β1, γ1; α2, β2, γ2; α3, β3, γ3 - угловые координаты соответственно 1-й, 2-й и 3-й навигационных звезд в мировой прямоугольной системе координат, измеряются либо выбираются по каталогам.
Величина модуля вектора угловой скорости определяется по формуле

а направляющие косинусы вектора угловой скорости по формулам

Задача изобретения решена.
При осуществлении изобретения выполняют следующие действия.
До начала движения (старта):
- выбирают систему координат, удобную для пользователя (ниже, как уже отмечалось, изложение ведется применительно к прямоугольной системе координат с началом в точке старта);
- выбирают три звезды, по направлениям которых будут измеряться скорости; одна из координатных осей может быть совмещена с направлением на одну из звезд, две другие звезды выбирают ближе к другим координатным осям;
- измеряют (или определяют по каталогам) угловые координаты выбранных звезд на момент старта;
- принимают излучения выбранных звезд;
- осуществляют сопровождение звезд по угловым координатам;
- фиксируют время старта и географические координаты точки старта (при необходимости по этим данным определяется начальная скорость объекта относительно мирового пространства, равная скорости точки старта в момент начала движения).
После начала движения (старта):
- измеряют текущие значения линейных скоростей по направлениям навигационных звезд;
- вычисляют по формулам (2) изменения линейной скорости по направлениям навигационных звезд, вызванные вращением объекта ν1, ν2, ν3;
- определяют проекции вектора угловой скорости по направлениям навигационных звезд по формулам (3);
- определяют проекции вектора угловой скорости объекта на оси прямоугольной системы координат по формулам (4);
- определяют величину модуля и направляющие косинусы вектора угловой скорости по формулам (5) и (6) соответственно.
Возможность осуществления способа и достижения цели изобретения определяется достижимой точностью измерения линейной скорости объекта по направлениям навигационных звезд, точностью определения угловых координат звезд до начала движения (старта) объекта и их углового сопровождения во время движения, возможностью вычислений по формулам (1)-(6). Ошибки измерения угловых координат звезд до начала движения астрономическими приборами составляют доли угловых секунд. Их влиянием на точность определения угловой скорости объекта, как и влиянием ошибок сопровождения звезд по угловым координатам, ошибок, вносимых вычислениями, можно пренебречь ввиду их малости. С учетом этого ошибка измерения вектора ω определяется как дифференциал, найденный из формулы (1)
Линейная скорость объекта может быть определена по способу, изложенному в патенте №2227302, или по способу, изложенному в заявке на изобретение, регистрационный №2004117733. Обеспечиваемая этими способами ошибка измерения линейной скорости, а следовательно, и изменений скорости, вызванных вращением объекта, составляет 3(10-3-10-4) м/с. При величине выноса измерителей скорости из центра вращения, например на три метра, точность измерения угловой скорости при реализации изобретения составляет δω=(10-3÷10-4) радиан/c или 5,7(10-2÷10-3) градус/c.
Изобретение в настоящее время реализуемо и обеспечивает высокую точность измерения вектора угловой скорости движущегося объекта, не зависящую от времени и дальности полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОНОМНОГО ИЗМЕРЕНИЯ ВЕКТОРОВ СКОРОСТИ И УСКОРЕНИЯ | 2004 |
|
RU2331890C2 |
| СПОСОБ АВТОНОМНОГО ИЗМЕРЕНИЯ ВЕКТОРА СКОРОСТИ | 2002 |
|
RU2227302C2 |
| СПОСОБ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ | 2004 |
|
RU2282154C1 |
| ГРАВИМЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНЕНИЯ ОТВЕСНОЙ ЛИНИИ В ОКЕАНЕ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2007 |
|
RU2348009C1 |
| Способ астроинерциальной ориентации и устройство для его осуществления | 2022 |
|
RU2836748C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2594631C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2589495C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| Способ определения навигационных параметров | 1981 |
|
SU1098382A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
Изобретение относится к измерительной технике и может быть использовано в системах пространственной ориентации подвижных объектов. Технический результат - повышение точности. Для достижени данного результата до начала движения (старта) объекта выбирают систему координат, удобную для пользователя. Выбирают три звезды, по направлениям которых будут измеряться скорости. Измеряют их угловые координаты. При этом после старта измеряют текущие значения линейных скоростей по направлениям навигационных звезд. Вычисляют изменения линейной скорости по направлениям навигационных звезд, вызванные вращением объекта, и определяют основные составляющие вектора угловой скорости по направлениям навигационных звезд.
Способ автономного измерения вектора угловой скорости движущегося объекта по излучениям звезд, отличающийся тем, что до начала движения выбирают три звезды, измеряют либо определяют по каталогам их угловые координаты, принимают излучения упомянутых звезд, фиксируют время и координаты точки начала движения, а после начала движения измеряют значения линейной скорости по направлениям звезд, вычисляют изменения линейной скорости по этим направлениям, вызванные вращением объекта по формулам
где  ,
,  ,
,  - измеряемые скорости по направлениям соответственно 1-й, 2-й и 3-й навигационной звезды;
- измеряемые скорости по направлениям соответственно 1-й, 2-й и 3-й навигационной звезды;
 ,
,  ,
,  - "плановые" траекторные скорости по тем же направлениям,
- "плановые" траекторные скорости по тем же направлениям,
определяют проекции вектора угловой скорости на направления звезд по формулам



где d - расстояние между приемником и центром вращения объекта,
определяют проекции вектора угловой скорости на оси прямоугольной системы координат по формулам



- определитель систем уравнений пересекающихся плоскостей,
a α1, β1, γ1; α2, β2, γ2; α3, β3, γ3 - угловые координаты соответственно 1-й, 2-й и 3-й навигационной звезды в мировой прямоугольной системе координат, определяют модуль и направляющие косинусы вектора угловой скорости по формулам

где αω, βω, γω - углы между вектором угловой скорости и осями мировой прямоугольной системы координат.
| СПОСОБ АВТОНОМНОГО ИЗМЕРЕНИЯ ВЕКТОРА СКОРОСТИ | 2002 |
|
RU2227302C2 |
| Способ определения координат звезд звездным датчиком, установленным на космическом аппарате, при каталогизации звездного неба | 1988 |
|
SU1656323A1 |
| Подобед В.В., Нестеров В.В | |||
| Общая астрономии | |||
| - М.: Наука, 1982, с.72-95 | |||
| Итоги науки и техники | |||
| ИСЗ Гиппарх | |||
| - М.: Наука, 1987, с.61-82 | |||
| Селезнев В.П | |||
| Навигационные устройства | |||
| Учебное пособие | |||
| - М.: Машиностроение, 1974, с.487-488 | |||
| Боднер В.А | |||
| Авиационные приборы | |||
| - М.: Машиностроение, 1969, с.422-423. | |||

