Предлагаемое техническое решение относится к области систем самонаведения для самодвижущихся объектов.
Оно предназначено для:
- измерения ускорений, скоростей, расстояний, угловых положений подвижного носителя бортовой системы самонаведения, горизонтального и вертикального угла визирования, азимута и угла места (наклона) визируемых объектов;
- формирования сигналов стабилизации и самонаведения для управления подвижным носителем
и может быть использовано в системах:
- определения параметров взаимного положения подвижного носителя и объекта визирования (подвижного или неподвижного) при их сближении;
- обеспечения управления подвижными носителями при самонаведении на объект визирования не только при наличии их локационного контакта, но и при его отсутствии;
- с повышенными угловой и линейной разрешающей способностью, точностью, дальностью действия, помехоустойчивостью и помехозащищенностью;
- пеленгации и автосопровождения объектов визирования (подвижных и/или неподвижных) по направлению и по дальности.
Известны различные способы наведения ракет и устройства систем наведения (патент RU №2239769 2002.11.27, кл. F41G 7/20; DE №19740888 A1 17.09.97, кл. F41G 7/00), где предлагаются технические решения по автономному управлению в одном случае вращающегося артиллерийского снаряда, а в другом случае по формированию управляющих сигналов при самонаведении в процессе локационного контакта с целью с использованием информации об угловой скорости поворота линии визирования.
Известна также система для точного определения вертикальной скорости ракеты и ее положения в пространстве (патент US №6082666 А 03.12.97, кл. F41G 7/00), содержащая радар, инерциальный блок, фильтр Калмана и линию обратной связи. Система обеспечивает оценку ошибок в измерении скорости, полученной от инерциального блока и вычислительной цепи.
Известны, кроме того, способ и устройство наведения ракеты на подвижную цель (WO №9939150 A1 20.01.99, кл. F41G 7/20), в которых точка перехвата, где ожидается встреча ракеты с целью, вычисляется на основании прогнозирования будущего движения цели и вычисления времени встречи ракеты с целью.
Указанные выше аналоги обладают общими недостатками: они не обеспечивают необходимые точность наведения, помехозащищенность, угловую и линейную разрешающую способность.
Известен блок управления наведением ракеты (патент JP №2848238 В2 7294196 А 27.04.94, кл. F41G 7/22), где на начальном участке наведения управляет ракетой автопилот, обеспечивая заданную траекторию полета в соответствии с программой при использовании выходной информации из инерциального блока. При достижении дальности до цели, на которой происходит захват цели, головка включается в режим поиска с использованием блока, создающего большую управляющую силу для разгона и торможения головки. Управление головкой при захвате цели осуществляется в соответствии с заданным изображением цели.
Из известных аналогов наиболее близким по технической сущности и назначению является способ формирования сигналов для стабилизации и самонаведения подвижного носителя, осуществляемый с помощью этого блока управления наведением ракеты.
Способ и устройство по патенту JP №2848238, однако, не отвечают современным повышенным требованиям к формированию сигналов стабилизации и сигналов самонаведения высокоточных подвижных носителей и к бортовым системам самонаведения, предназначенным для их оснащения, так как обладают следующими основными недостатками:
- не обеспечивают необходимую точность самонаведения подвижного носителя из-за отсутствия в системе информации о проекциях вектора кажущегося линейного ускорения и о проекциях вектора абсолютной угловой скорости поворота линии (вектора) визирования в антенной базовой системе координат Oxyz, особенно при повышенной дальности действия подвижного носителя (т.е. при повышенном времени работы устройства-прототипа);
- недостаточные угловая и линейная разрешающие способности, которые должны быть сопоставимы с размерами обнаруживаемого (в том числе и малоразмерного) ОВ и которые необходимы для решения задачи самонаведения подвижного носителя на ОВ с малой эффективной поверхностью рассеивания (ЭПР) и при наличии гидрометеоров на трассе движения носителя;
- конструктивно ограничены углы прокачки наружной и внутренней рамок двухосного карданова подвеса при заданном ограниченном диаметре отсека размещения устройства вследствие переменной электрической редукции между углами поворота параболического зеркала относительно центра излучения неподвижного многоканального облучателя и соответствующими углами поворота линии (вектора) визирования, что, в свою очередь, ограничивает диапазон угла наклона траектории на автономном, например, баллистическом участке траектории движения носителя, снижая его тактико-технические характеристики.
Цель заявляемых технических решений (способа и устройства для его осуществления) - обеспечение повышенных точности самонаведения подвижного носителя, угловой и линейной разрешающей способности самонаведения при одновременном повышении помехоустойчивости, а также помехозащищенности в условиях внешних мешающих воздействий в простых и сложных метеоусловиях при наличии гидрометеоров на трассе движения носителя и увеличении диапазона угла наклона траектории на автономном, например, баллистическом участке траектории движения носителя.
Сущность предлагаемого изобретения заключается в том, что по предлагаемому способу при предстартовой подготовке подвижного носителя, кроме задания начальных координат цели или/и начального назначения ОВ, формируют начальные условия выставки инерциального измерения параметров вектора визирования цели в виде пакета последовательных информационных слов (информационный массив), содержащего дополнительно начальные значения проекций Vξ0, Vη0, Vζ0, вектора  линейной скорости предстартового перемещения подвижного носителя на соответствующие координатные оси горизонтальной системы координат Оξηζ с началом в центре масс подвижного носителя, декартовых координат ξ0, η0, ζ0 цели или/и ОВ, географической долготы λ0 и географической широты ϕ0 подвижного носителя (фиг.1). На борту подвижного носителя преобразуют заданные начальные условия выставки инерциального измерения параметров вектора визирования цели или/и ОВ в сигналы, пропорциональные проекциям Vx0, Vy0, Vz0 вектора
линейной скорости предстартового перемещения подвижного носителя на соответствующие координатные оси горизонтальной системы координат Оξηζ с началом в центре масс подвижного носителя, декартовых координат ξ0, η0, ζ0 цели или/и ОВ, географической долготы λ0 и географической широты ϕ0 подвижного носителя (фиг.1). На борту подвижного носителя преобразуют заданные начальные условия выставки инерциального измерения параметров вектора визирования цели или/и ОВ в сигналы, пропорциональные проекциям Vx0, Vy0, Vz0 вектора  линейной скорости предстартового перемещения подвижного носителя на соответствующие координатные оси базовой антенной системы координат Oxyz (фиг.2), в сигналы, пропорциональные углам
линейной скорости предстартового перемещения подвижного носителя на соответствующие координатные оси базовой антенной системы координат Oxyz (фиг.2), в сигналы, пропорциональные углам  и
и  визирования цели или/и ОВ соответственно в горизонтальной плоскости и в вертикальной плоскости в горизонтальной системе координат Оξηζ (фиг.3), в сигналы, пропорциональные составляющим
визирования цели или/и ОВ соответственно в горизонтальной плоскости и в вертикальной плоскости в горизонтальной системе координат Оξηζ (фиг.3), в сигналы, пропорциональные составляющим  и
и  пространственной угловой координаты
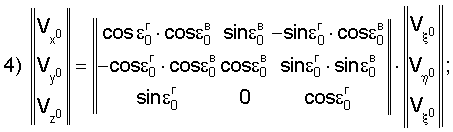
пространственной угловой координаты  или/и ОВ в базовой антенной системе координат Oxyz (фиг.2), в сигналы, пропорциональные направляющим косинусам
или/и ОВ в базовой антенной системе координат Oxyz (фиг.2), в сигналы, пропорциональные направляющим косинусам  где i, j = 1, 2, 3, определяющим начальное взаимное положение базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Сξ0η0ζ0, связанной одной своей координатной осью Сζ0 с неподвижной целью или/и с ОВ, расположенной, например, на земной поверхности (фиг.1).
где i, j = 1, 2, 3, определяющим начальное взаимное положение базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Сξ0η0ζ0, связанной одной своей координатной осью Сζ0 с неподвижной целью или/и с ОВ, расположенной, например, на земной поверхности (фиг.1).
В момент времени старта подвижного носителя обновление начальной информации прекращается, одновременно измеряют сигналы, пропорциональные проекциям nзх, nзy, nзz вектора  кажущегося линейного ускорения движения и проекциям ωзх, ωзy, ωзz вектора
кажущегося линейного ускорения движения и проекциям ωзх, ωзy, ωзz вектора  абсолютной угловой скорости поворота зеркала антенны на соответствующие координатные оси системы координат Охзyзzз, связанной с зеркалом антенны, где Охз - оптическая ось зеркала. По этим измеренным сигналам с учетом переменной электрической редукции определяют сигналы, пропорциональные проекциям nx, ny, nz вектора
абсолютной угловой скорости поворота зеркала антенны на соответствующие координатные оси системы координат Охзyзzз, связанной с зеркалом антенны, где Охз - оптическая ось зеркала. По этим измеренным сигналам с учетом переменной электрической редукции определяют сигналы, пропорциональные проекциям nx, ny, nz вектора  кажущегося линейного ускорения движения и проекциям ωx, ωy, ωz вектора
кажущегося линейного ускорения движения и проекциям ωx, ωy, ωz вектора  абсолютной угловой скорости поворота вектора (линии) визирования цели на соответствующие координатные оси базовой антенной системы координат Oxyz. По полученным сигналам с учетом начальной информации назначения цели или/и ОВ и начальных условий выставки инерциального измерения параметров вектора визирования формируют сигналы, пропорциональные текущим значениям параметров вектора
абсолютной угловой скорости поворота вектора (линии) визирования цели на соответствующие координатные оси базовой антенной системы координат Oxyz. По полученным сигналам с учетом начальной информации назначения цели или/и ОВ и начальных условий выставки инерциального измерения параметров вектора визирования формируют сигналы, пропорциональные текущим значениям параметров вектора  визирования цели, а именно: проекций Vx, Vy, Vz вектора абсолютной линейной скорости сближения подвижного носителя с целью на соответствующие координатные оси базовой антенной системы координат Oxyz, наклонной дальности L сближения подвижного носителя с целью, составляющих e1 и е2 пространственной угловой координаты
визирования цели, а именно: проекций Vx, Vy, Vz вектора абсолютной линейной скорости сближения подвижного носителя с целью на соответствующие координатные оси базовой антенной системы координат Oxyz, наклонной дальности L сближения подвижного носителя с целью, составляющих e1 и е2 пространственной угловой координаты  цели в базовой антенной системе координат Oxyz (фиг.2), направляющих косинусов βij, где i, j = 1, 2, 3, взаимного углового положения базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Сξ0η0ζ0, связанной одной своей координатной осью Сζ0 с неподвижной целью или/и с ОВ, расположенной, например, на земной поверхности (фиг.1). При отсутствии локационного контакта с целью или/и с ОВ преобразуют полученные сигналы, пропорциональные соответствующим текущим значениям параметров вектора визирования цели, в управляющие сигналы, по которым осуществляют поворот зеркала антенны по углу наклона
цели в базовой антенной системе координат Oxyz (фиг.2), направляющих косинусов βij, где i, j = 1, 2, 3, взаимного углового положения базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Сξ0η0ζ0, связанной одной своей координатной осью Сζ0 с неподвижной целью или/и с ОВ, расположенной, например, на земной поверхности (фиг.1). При отсутствии локационного контакта с целью или/и с ОВ преобразуют полученные сигналы, пропорциональные соответствующим текущим значениям параметров вектора визирования цели, в управляющие сигналы, по которым осуществляют поворот зеркала антенны по углу наклона  и по азимуту
и по азимуту  , которые регистрируют и затем с учетом переменной электрической редукции преобразуют в сигналы, пропорциональные углам поворота вектора (линии) визирования по углу наклона и по азимуту относительно корпуса подвижного носителя до совмещения его направления с направлением на цель, и совмещают метку (подвижный строб) дальности с целью. При этом формируют сигналы, пропорциональные скорости изменения углов визирования цели в горизонтальной
, которые регистрируют и затем с учетом переменной электрической редукции преобразуют в сигналы, пропорциональные углам поворота вектора (линии) визирования по углу наклона и по азимуту относительно корпуса подвижного носителя до совмещения его направления с направлением на цель, и совмещают метку (подвижный строб) дальности с целью. При этом формируют сигналы, пропорциональные скорости изменения углов визирования цели в горизонтальной  и в вертикальной
и в вертикальной  плоскости в системе координат Оξηζ (фиг.3), а также сигналы, пропорциональные скорости изменения угла наклона
плоскости в системе координат Оξηζ (фиг.3), а также сигналы, пропорциональные скорости изменения угла наклона  и азимута
и азимута  (скорости изменения пеленгов цели) в связанной системе координат Ox1y1z1 (фиг.4). Одновременно преобразуют сигналы, пропорциональные проекциям ωx, ωy, ωz вектора абсолютной угловой скорости поворота базовой антенной системы координат Oxyz, в сигналы, пропорциональные его проекциям
(скорости изменения пеленгов цели) в связанной системе координат Ox1y1z1 (фиг.4). Одновременно преобразуют сигналы, пропорциональные проекциям ωx, ωy, ωz вектора абсолютной угловой скорости поворота базовой антенной системы координат Oxyz, в сигналы, пропорциональные его проекциям 

 на соответствующие координатные оси связанной системы координат Ox1y1z1. По полученным сигналам определяют сигналы, пропорциональные скорости изменения соответственно рыскания
на соответствующие координатные оси связанной системы координат Ox1y1z1. По полученным сигналам определяют сигналы, пропорциональные скорости изменения соответственно рыскания  , тангажа
, тангажа  , крена
, крена  подвижного носителя, по которым формируют сигналы, пропорциональные соответственно рысканию ψ, тангажу ϑ, крену γ с учетом их начальных значений, полученных при предстартовой подготовке подвижного носителя. При этом определяют сигналы, пропорциональные проекциям
подвижного носителя, по которым формируют сигналы, пропорциональные соответственно рысканию ψ, тангажу ϑ, крену γ с учетом их начальных значений, полученных при предстартовой подготовке подвижного носителя. При этом определяют сигналы, пропорциональные проекциям 

 вектора
вектора  углового ускорения подвижного носителя на соответствующие координатные оси связанной системы координат Ox1y1z1. Наконец, по полученным сигналам формируют сигналы стабилизации подвижного носителя от его колебаний относительно своего центра масс в горизонтальной плоскости δг, в вертикальной плоскости δв и по крену δк, а также сигналы самонаведения подвижного носителя на цель, пропорциональные перегрузкам nв и nг, которые являются функциями, например, текущих значений сформированных углов положения подвижного носителя в вертикальной плоскости и в горизонтальной плоскости, функциями текущих значений модуля
углового ускорения подвижного носителя на соответствующие координатные оси связанной системы координат Ox1y1z1. Наконец, по полученным сигналам формируют сигналы стабилизации подвижного носителя от его колебаний относительно своего центра масс в горизонтальной плоскости δг, в вертикальной плоскости δв и по крену δк, а также сигналы самонаведения подвижного носителя на цель, пропорциональные перегрузкам nв и nг, которые являются функциями, например, текущих значений сформированных углов положения подвижного носителя в вертикальной плоскости и в горизонтальной плоскости, функциями текущих значений модуля  наклонной скорости сближения подвижного носителя с целью и составляющих
наклонной скорости сближения подвижного носителя с целью и составляющих  и
и  вектора
вектора  угловой скорости поворота вектора (линии) визирования цели соответственно в вертикальной и в горизонтальной плоскости в системе координат Сξηζ. Полученную информацию преобразуют в управляющие сигналы, которые поступают в виде информационного массива стабилизации и управления по информационной линии связи во внешнюю аппаратуру управления рулевым приводом подвижного носителя.
угловой скорости поворота вектора (линии) визирования цели соответственно в вертикальной и в горизонтальной плоскости в системе координат Сξηζ. Полученную информацию преобразуют в управляющие сигналы, которые поступают в виде информационного массива стабилизации и управления по информационной линии связи во внешнюю аппаратуру управления рулевым приводом подвижного носителя.
При достижении значения наклонной дальности сближения подвижного носителя с целью, равной величине наклонной дальности возможного локационного контакта с ОВ, излучают последовательно зондирующие сигналы сначала основного диапазона волн и затем встроенного более коротковолнового диапазона волн согласно принятой логике поиска ОВ. При этом частота более коротковолнового диапазона волн превышает в четное число раз частоту основного диапазона волн, линейная поляризация основного диапазона волн ортогональна по отношению к линейной поляризации основного диапазона волн, а линии визирования встроенного и основного каналов излучения совмещают между собой и с начальной юстировкой обоих каналов излучения со строительными осями подвижного носителя, причем управление направлением совмещенной линии визирования отрабатывают одним и тем же приводом зеркала антенны основного диапазона волн. Затем осуществляют секторный поиск ОВ по направлению и поиск ОВ по дальности. Принимают отраженные от облучаемых ОВ сигналы, находящиеся в пределах сектора поиска ОВ по направлению и в зоне поиска ОВ по дальности, производят по основному или по встроенному более коротковолновому диапазону обнаружение, выбор и захват ОВ, выбранного из всех обнаруженных в секторе поиска ОВ согласно принятым критериям выбора, на автосопровождение по дальности и по направлению, совмещают информацию, полученную в результате первичной обработки принимаемых отраженных от облучаемого ОВ высокочастотных сигналов по основному или встроенному диапазону волн, подвергают полученные сигналы вторичной (низкочастотной) обработке. В результате этого формируют сигналы по основному или по встроенному каналу излучения, которые пропорциональны составляющим пространственной угловой координаты ОВ и наклонной дальности до ОВ в антенной системе координат Oxyz. При этом по сигналам, пропорциональным измеренным значениям проекций вектора кажущегося линейного ускорения и проекций вектора абсолютной угловой скорости поворота вектора (линии) визирования цели или/и ОВ на соответствующие координатные оси базовой антенной системы координат Ox0y0z0, остановленной в момент времени начала поиска ОВ (или в течение заданного интервала измерения), с учетом линейного смещения фазового центра антенны (или/и центра излучения зондирующих сигналов) относительно центра пересечения осей чувствительности измерения проекций вектора кажущегося линейного ускорения и проекций вектора абсолютной угловой скорости поворота вектора (линии) визирования цели или/и ОВ определяют сигналы, пропорциональные параметрам траекторных флюктуаций и деформирующих (упругих, вибрационных и т.п.) воздействий корпуса подвижного носителя на пространственное положение фазового центра антенны относительно цели или/и ОВ. Причем измеряют сигналы, пропорциональные параметрам движения апертуры антенны относительно наблюдаемого (визируемого) объекта, т.е. цели или/и ОВ, которые являются параметрами траекторного сигнала, в системе координат Oxсмyсмzсм, смещенной относительно фиксированной базовой антенной системы координат на некоторое расстояние, т.е. относительно фазового центра антенны. По этим сигналам формируют сигнал, пропорциональный фазе опорной функции, являющейся функцией модуля вектора визирования цели или/и ОВ в смещенной системе координат Oxсмyсмzсм, т.е. наклонной дальности до цели или/и ОВ, в момент времени начала поиска ОВ (или заданного интервала измерения), а также скорости ее изменения и ускорения за время поиска ОВ (или в течение заданного интервала времени измерения). Затем по полученному сигналу, пропорциональному фазе опорной функции, определяют сигнал, пропорциональный фазовой поправке, компенсирующей в принимаемых сигналах, отраженных от облучаемого ОВ, траекторную нестабильность фазового центра антенны и деформирующие (упругие, вибрационные и т.п.) воздействия корпуса подвижного носителя, перемещающегося по траектории. При автосопровождении ОВ по направлению и по дальности сравнивают сформированные сигналы, пропорциональные текущим значениям параметров вектора визирования цели в базовой антенной системе координат Oxyz, а именно: составляющих пространственной угловой координаты цели и наклонной дальности сближения подвижного носителя с целью, соответственно, с идентичными сигналами автосопровождения ОВ по направлению и по дальности, пропорциональными текущим значениям параметров вектора визирования ОВ в базовой антенной системе координат Oxyz, осуществляют оптимальную адаптивную помехоустойчивую фильтрацию соответствующих сигналов сравнения, формируя сигналы, пропорциональные точным оценкам соответствующих сигналов сравнения, полученным в результате оптимальной адаптивной фильтрации, с помощью которых компенсируют (корректируют) сигналы, пропорциональные соответственно текущим значениям параметров вектора визирования цели. После этого по сигналам, полученным в результате компенсации (коррекции), формируют управляющие сигналы, по которым производят поворот зеркала антенны по углу наклона и по азимуту относительно корпуса подвижного носителя, регистрируют их и затем с учетом переменной электрической редукции преобразуют их соответственно в углы отклонения линии (вектора) визирования по углу наклона и по азимуту относительно корпуса подвижного носителя до совмещения ее (его) с направлением на ОВ, а при автосопровождении по дальности отфильтрованный сигнал рассогласования (ошибки) интегрируют во времени и получат информацию о наклонной дальности и скорости сближения подвижного носителя с ОВ. Одновременно формируют сигналы, пропорциональные скорости изменения соответственно углов визирования ОВ в горизонтальной  и в вертикальной
и в вертикальной  плоскости в системе координат Оξηζ, сигналы стабилизации подвижного носителя от колебаний относительно своего центра масс в горизонтальной δг, вертикальной δв плоскости и по крену δк, сигналы самонаведения подвижного носителя на ОВ, пропорциональные перегрузкам соответственно в горизонтальной nг и в вертикальной nв плоскости, которые являются, например, функциями текущих значений модуля скорости
плоскости в системе координат Оξηζ, сигналы стабилизации подвижного носителя от колебаний относительно своего центра масс в горизонтальной δг, вертикальной δв плоскости и по крену δк, сигналы самонаведения подвижного носителя на ОВ, пропорциональные перегрузкам соответственно в горизонтальной nг и в вертикальной nв плоскости, которые являются, например, функциями текущих значений модуля скорости  изменения наклонной дальности L сближения подвижного носителя с ОВ и скорости изменения углов визирования ОВ соответственно в горизонтальной
изменения наклонной дальности L сближения подвижного носителя с ОВ и скорости изменения углов визирования ОВ соответственно в горизонтальной  и в вертикальной
и в вертикальной  плоскости, преобразуют полученные сигналы в сигналы управления рулевым приводом подвижного носителя, обеспечивая стабилизацию и самонаведение подвижного носителя на ОВ согласно принимаемому закону самонаведения.
плоскости, преобразуют полученные сигналы в сигналы управления рулевым приводом подвижного носителя, обеспечивая стабилизацию и самонаведение подвижного носителя на ОВ согласно принимаемому закону самонаведения.
Сущность предлагаемого изобретения заключается также в том, что бортовая система самонаведения подвижного носителя, реализующая способ, включает параболическое зеркало, многоканальный облучатель с линейной поляризацией основного диапазона волн, двухосный карданов подвес, управляемый чувствительный и исполнительный элемент следящего гиропривода, датчик угла поворота наружной рамки и датчик угла поворота внутренней рамки двухосного карданова подвеса, три однокомпонентных измерителя линейных ускорений, устройство управления направлением и гиростабилизации линии визирования, суммарно-разностный преобразователь (СРП) сверхвысокочастотных (СВЧ) сигналов и волноводно-коммутирующее устройство (ВКУ) основного диапазона волн, двухканальный гироскопический датчик угловой скорости (ДУС), установленный во внутренней рамке двухосного карданова подвеса так, что в заарретированном положении одна из его осей чувствительности совпадает с нулевым направлением вектора (линии) визирования, а другая его ось чувствительности ориентирована, например, вверх вдоль положительного направления оси вращения внутренней рамки, причем кинетический момент ротора гироскопического ДУС совпадает с положительным направлением оси вращения наружной рамки, причем все три однокомпонентных измерителя линейного ускорения установлены во внутренней рамке двухосного карданова подвеса, а ось чувствительности одного из них взаимно ортогональна по отношению к взаимно ортогональным осям чувствительности двух других однокомпонентных измерителей линейного ускорения, при этом ось чувствительности одного из трех однокомпонентных измерителей линейного ускорения совпадает в заарретированном положении с нулевым направлением линии визирования. Расстояние между каждым из шарниров жестких тяг, размещенных на параболическом зеркале, и центром вращения параболического зеркала равно расстоянию между каждым из шарниров, установленных соответственно на наружной рамке и на внутренней рамке двухосного карданова подвеса, и центром вращения этих рамок. Кроме того, система содержит радионавигационный приемоизмеритель, цифровое вычислительно устройство (ЦВУ), а также малое гиперболическое решетчатое зеркало диаметром в несколько раз меньше (например, в четыре раза) по сравнению с основным параболическим зеркалом. Малое гиперболическое решетчатое зеркало жестко связано с помощью неподвижных волноводов с основанием антенного устройства и, следовательно, с корпусом подвижного носителя. Один из фокусов малого гиперболического решетчатого зеркала, являющийся дальним по отношению к основному параболическому зеркалу, совпадает с фокусом параболического зеркала, а в другом фокусе малого гиперболического решетчатого зеркала, который является ближним по отношению к основному параболическому зеркалу, размещен фазовый центр антенны (или/и центр излучения неподвижного многоканального облучателя прямого облучения) основного диапазона волн с линейной поляризацией, совпадающей с направлением проводников решетки малого гиперболического зеркала. В дальнем фокусе малого гиперболического решетчатого зеркала размещен фазовый центр антенны (или/и центр излучения многоканального облучателя прямого облучения) более коротковолнового диапазона волн с линейной поляризацией, ортогональной относительно направления проводников решетки малого гиперболического зеркала. При этом многоканальный облучатель прямого облучения более коротковолнового диапазона волн жестко связан с основанием антенного устройства и, следовательно, с корпусом подвижного носителя с помощью неподвижных волноводов, соединяющихся с дополнительно введенным СРП СВЧ-сигналов более коротковолнового диапазона волн. СРП соединен с дополнительно введенным ВКУ более коротковолнового диапазона волн, управляемым сигналами сканирования. Приемопередатчик выполнен двухдиапазонным для основного и более коротковолнового диапазона волн. Соответствующие входы приемопередатчика с помощью волноводов соединены с выходами ВКУ более коротковолнового диапазона волн, подключенного своими входами также с помощью волноводов к дополнительно введенному СРП СВЧ-сигналов более коротковолнового диапазона волн. При этом выходы трех однокомпонентных измерителей линейного ускорения, выходы датчиков угла поворота соответственно наружной и внутренней рамок двухосного карданова подвеса, выходы двухканального гироскопического ДУС, выходы устройства управления направлением и гиростабилизации линии (вектора) визирования, а также выход видеосигнала двухдиапазонного передатчика соединены с соответствующими входами ЦВУ, а выходы сигналов рассогласования (ошибки) устройств автосопровождения по углу наклона и по азимуту ЦВУ соединены с соответствующими входами устройства управления направлением и гиростабилизации линии (вектора) визирования. Информационный вход ЦВУ соединен информационной линией связи с радионавигационным приемоизмерителем сигналов спутниковой системы навигации. При этом по данной информационной линии связи в ЦВУ поступает информационный массив сигналов коррекции инерциального измерения параметров вектора визирования цели. Другой информационный вход ЦВУ соединен информационной линией связи с внешней аппаратурой подготовки и управления пуском подвижного носителя заявляемой бортовой системы самонаведения. При этом по этой информационной линии связи в ЦВУ поступает массив предстартового начального назначения ОВ и начальной выставки инерциального измерения параметров вектора визирования. По одному из информационных выходов ЦВУ по соответствующей линии связи выдается информационный массив команд и сигналов управления высокочастотной частью предлагаемой бортовой системы самонаведения, а другой информационный выход ЦВУ соединен информационной линией связи с внешней аппаратурой управления рулевым приводом подвижного носителя.
Введение указанных признаков в способ и устройство для его осуществления повышает точность самонаведения подвижного носителя на объект визирования, угловую и линейную разрешающую способность заявляемой бортовой системы самонаведения подвижного носителя, особенно при наведении подвижного носителя на малоразмерные объекты визирования, обладающие малой эффективной поверхностью рассеяния, и при наличии гидрометеоров на трассе движения носителя, а также помехоустойчивость системы и помехозащищенность самонаведения подвижного носителя на ОВ в условиях внешних мешающих воздействий и увеличивает диапазон угла наклона траектории на автономном, например, баллистическом участке траектории движения носителя.
Использование инерциального измерения параметров вектора визирования в предлагаемой бортовой системе самонаведения подвижного носителя и двухдиапазонности ее антенно-волноводного и приемо-передающего модуля с блоком измерителей инерциального канала совместно с ЦВУ в ее составе обеспечивает требуемую повышенную точность самонаведения, повышенную дальность действия подвижного носителя и помехозащищенность системы в условиях мешающих воздействий. Система обеспечивает автономное самонаведение на цель и/или ОВ.
Из уровня техники не выявлено решений, имеющих признаки, совпадающие с отличительными признаками предлагаемых способа и устройства для его осуществления, поэтому можно считать, что предложенные технические решения соответствуют условию изобретательского уровня.
Сущность изобретения поясняется чертежами, где на фиг.1 представлены принятые системы координат, на фиг.2 - положение вектора L визирования ОВ (цели) в базовой антенной системе координат Oxyz, на фиг.3 - взаимное положение базовой антенной системы координат Oxyz и горизонтальной системы координат Оξηζ, на фиг.4 - взаимное положение базовой антенной системы координат Oxyz и связанной системы координат Ox1y1z1, на фиг.5 - взаимное положение системы координат Ox1y1z1 и горизонтальной системы координат Оξηζ, на фиг.6 - структурная схема предлагаемой бортовой системы самонаведения подвижного носителя.
Предлагаемый способ формирования сигналов стабилизации и самонаведения подвижного носителя характеризуется тем, что во время предстартовой подготовки подвижного носителя задают и вводят на борт подвижного носителя сигналы, характеризующие начальные координаты цели или/и начальное назначение ОВ, формируют в виде сигналов пакет последовательных информационных слов, содержащий информацию о начальных значениях дальности до цели и скорости сближения подвижного носителя с целью в предстартовом положении подвижного носителя, угле наклона и азимуте в связанной с центром масс подвижного носителя системе координат, рысканья, тангажа и крена подвижного носителя, а также о первой программной дальности для перехода подвижного носителя после старта на более низкую траекторию и о второй программной дальности излучения зондирующих импульсов, контрольное слово и командное слово, затем проверяют сформированный пакет на отсутствие в нем искажений, преобразуют сигналы, характеризующие пакет, в параллельную форму для счисления на борту подвижного носителя после старта текущей дальности сближения подвижного носителя с целью, по полученному значению начальной дальности до цели формируют зону поиска ОВ на этой дальности, по мере изменения взаимного положения подвижного носителя до его старта и цели пакет последовательных информационных слов непрерывно обновляют, после старта подвижного носителя при отсутствии локационного контакта с целью измеряют продольную составляющую вектора линейного ускорения подвижного носителя в связанной системе координат на его борту и выполняют автономное счисление текущей дальности сближения подвижного носителя с целью двойным интегрированием измеренного ускорения при заданных во время предстартовой подготовки подвижного носителя начальных значениях скорости и дальности его сближения с целью, при достижении подвижным носителем заданной при его предстартовой подготовке первой программной дальности осуществляют переход подвижного носителя на более низкую траекторию его перемещения к цели, при достижении подвижным носителем второй программной дальности, заданной также при его предстартовой подготовке, излучают зондирующие сигналы за счет создания антенной системой одновременно попарно четырех диаграмм направленности с частично перекрывающимися лепестками в двух взаимно перпендикулярных плоскостях и по команде поиска ОВ осуществляют поиск ОВ по дальности и секторный поиск ОВ по направлению, при этом принимают отраженные от облучаемых ОВ сигналы, находящиеся в пределах сформированной зоны поиска ОВ по дальности и в пределах сектора поиска ОВ по направлению, запоминают из всех обнаруженных в секторе поиска ОВ азимут ОВ, выбранного согласно заданным критериям выбора, и фиксируют отклонение выбранного ОВ по дальности от центра сформированной зоны поиска ОВ, а после полного просмотра сектора поиска формируют сигнал разрешения захвата выбранного ОВ на автосопровождение по дальности и по направлению, производят коррекцию значений автономно счисляемых текущей скорости и текущей дальности сближения подвижного носителя с ОВ на величину, пропорциональную отклонению положения ОВ от центра зоны поиска по дальности и по скорости, осуществляют автосопровождение выбранного ОВ по дальности, при этом отраженные от облучаемого ОВ сигналы принимают двумя парами приемных каналов, выполняют суммарно-разностное преобразование принимаемых сигналов, в результате получают суммарный ∑ сигнал и два разностных Δ1 и Δ2 сигнала, которые поочередно с периодом 4·Тп, где Тп - период повторения излучаемых зондирующих сигналов, складывают и вычитают с суммарным ∑ сигналом, формируют суммарно-разностные сигналы (полусуммы и полуразности)  т.е. за период 4·Тп формируют сигналы
т.е. за период 4·Тп формируют сигналы 


 которые детектируют, и затем формируют сигналы, пропорциональные соответственно сигналам рассогласования (ошибкам) автосопровождения по углу наклона (места) и по азимуту, которые являются составляющими пространственной угловой координаты облучаемого ОВ в антенной системе координат. Кроме того, вырабатывают управляющие сигналы, пропорциональные соответственно составляющим вектора угловой скорости поворота линии визирования в направлении ОВ соответственно в вертикальной и в горизонтальной плоскости в горизонтальной системе координат, которые интегрируют, и совмещают линию визирования с ОВ, при этом регистрируют сигналы, пропорциональные отклонениям линии визирования ОВ по углу наклона и по азимуту относительно корпуса подвижного носителя, осуществляют автосопровождение ОВ по направлению. По полученным сигналам, пропорциональным составляющим вектора угловой скорости поворота линии визирования в направлении ОВ в вертикальной и горизонтальной плоскости, сигналам, пропорциональным отклонениям линии визирования ОВ по углу наклона и по азимуту относительно корпуса подвижного носителя, сигналам, пропорциональным текущим значениям дальности сближения подвижного носителя с ОВ и скорости ее изменения, а также сигналам, пропорциональным начальным значениям рысканья (курса), тангажа и крена, формируют сигналы для стабилизации подвижного носителя от его колебаний относительно центра масс и сигналов самонаведения подвижного носителя на ОВ.
которые детектируют, и затем формируют сигналы, пропорциональные соответственно сигналам рассогласования (ошибкам) автосопровождения по углу наклона (места) и по азимуту, которые являются составляющими пространственной угловой координаты облучаемого ОВ в антенной системе координат. Кроме того, вырабатывают управляющие сигналы, пропорциональные соответственно составляющим вектора угловой скорости поворота линии визирования в направлении ОВ соответственно в вертикальной и в горизонтальной плоскости в горизонтальной системе координат, которые интегрируют, и совмещают линию визирования с ОВ, при этом регистрируют сигналы, пропорциональные отклонениям линии визирования ОВ по углу наклона и по азимуту относительно корпуса подвижного носителя, осуществляют автосопровождение ОВ по направлению. По полученным сигналам, пропорциональным составляющим вектора угловой скорости поворота линии визирования в направлении ОВ в вертикальной и горизонтальной плоскости, сигналам, пропорциональным отклонениям линии визирования ОВ по углу наклона и по азимуту относительно корпуса подвижного носителя, сигналам, пропорциональным текущим значениям дальности сближения подвижного носителя с ОВ и скорости ее изменения, а также сигналам, пропорциональным начальным значениям рысканья (курса), тангажа и крена, формируют сигналы для стабилизации подвижного носителя от его колебаний относительно центра масс и сигналов самонаведения подвижного носителя на ОВ.
При предстартовой подготовке подвижного носителя, кроме задания начальных координат цели или/и начального назначения ОВ, формируют начальные условия выставки инерциального измерения параметров вектора визирования цели или/и ОВ в виде сигналов, характеризующих пакет последовательных информационных слов (информационный массив), содержащий начальные значения проекций 

 вектора
вектора  линейной скорости предстартового перемещения подвижного носителя на соответствующие координатные оси горизонтальной системы координат Оξηζ с началом в центре масс подвижного носителя, декартовых координат ξ0, η0, ζ0 цели или/и ОВ, географической долготы λ0 и географической широты ϕ0 подвижного носителя (фиг.1). На борту подвижного носителя заданные начальные условия выставки инерциального измерения параметров вектора визирования цели или/и ОВ преобразуют в сигналы, пропорциональные проекциям
линейной скорости предстартового перемещения подвижного носителя на соответствующие координатные оси горизонтальной системы координат Оξηζ с началом в центре масс подвижного носителя, декартовых координат ξ0, η0, ζ0 цели или/и ОВ, географической долготы λ0 и географической широты ϕ0 подвижного носителя (фиг.1). На борту подвижного носителя заданные начальные условия выставки инерциального измерения параметров вектора визирования цели или/и ОВ преобразуют в сигналы, пропорциональные проекциям 

 вектора
вектора  линейной скорости предстартового перемещения подвижного носителя на соответствующие координатные оси базовой антенной системы координат Oxyz (фиг.3), в сигналы, пропорциональные углам
линейной скорости предстартового перемещения подвижного носителя на соответствующие координатные оси базовой антенной системы координат Oxyz (фиг.3), в сигналы, пропорциональные углам  и
и  визирования цели или/и ОВ соответственно в горизонтальной плоскости и в вертикальной плоскости в системе координат Оξηζ (фиг.3), в сигналы, пропорциональные составляющим и пространственной угловой координаты или/и
визирования цели или/и ОВ соответственно в горизонтальной плоскости и в вертикальной плоскости в системе координат Оξηζ (фиг.3), в сигналы, пропорциональные составляющим и пространственной угловой координаты или/и  в базовой антенной системе координат Oxyz (фиг.2), в сигналы, пропорциональные направляющим косинусам
в базовой антенной системе координат Oxyz (фиг.2), в сигналы, пропорциональные направляющим косинусам  где i, j = 1, 2, 3, определяющим начальное взаимное положение базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Оξηζ (фиг.3), в сигналы, пропорциональные составляющим и пространственной угловой координаты или/и в базовой антенной системе координат Oxyz (фиг.2), в сигналы, пропорциональные направляющим косинусам
где i, j = 1, 2, 3, определяющим начальное взаимное положение базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Оξηζ (фиг.3), в сигналы, пропорциональные составляющим и пространственной угловой координаты или/и в базовой антенной системе координат Oxyz (фиг.2), в сигналы, пропорциональные направляющим косинусам  где i, j = 1, 2, 3, определяющим начальное взаимное положение базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Сξ0η0ζ0, связанной одной своей координатной осью Сζ0 с неподвижной целью или/и с ОВ, расположенной, например, на земной поверхности (фиг.1). Данные преобразования выполняются согласно следующему алгоритму:
где i, j = 1, 2, 3, определяющим начальное взаимное положение базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Сξ0η0ζ0, связанной одной своей координатной осью Сζ0 с неподвижной целью или/и с ОВ, расположенной, например, на земной поверхности (фиг.1). Данные преобразования выполняются согласно следующему алгоритму:

где
ξ0=ξmax - начальное значение горизонтальной декартовой координаты цели или/и ОВ, т.е. горизонтальная дальность D0 пуска подвижного носителя;

где
ζ0 - начальное значение боковой декартовой координаты цели или/и ОВ в горизонтальной плоскости;

где
r0 - начальное значение модуля радиуса-вектора  центра масс подвижного носителя, определяющего его положение относительно центра Земли;
центра масс подвижного носителя, определяющего его положение относительно центра Земли;
Н0=η0 - высота пуска подвижного носителя;
R=Rз - радиус земного сфероида в месте нахождения цели или/и ОВ;

где
L0 - начальное значение наклонной дальности до цели или/и ОВ, задаваемое предстартовым начальным назначением;
где
j, k = 1, 2, 3;
где
i - значение приращения (инкремент).
В момент времени старта подвижного носителя обновление начальной информации прекращается, одновременно измеряют сигналы, пропорциональные проекциям nзх, nзy, nзz вектора  кажущегося линейного ускорения движения и проекциям ωзх, ωзy, ωзz вектора абсолютной угловой скорости поворота зеркала антенны на соответствующие координатные оси системы координат Охзyзzз, связанной с зеркалом антенны, где ось Охз - оптическая ось зеркала. По этим измеренным сигналам, принимая во внимание функциональную зависимость (переменную электрическую редукцию) между углами поворота подвижного зеркала и углами поворота линии визирования (диаграммы направленности (луча) антенны) при вращении зеркала в двух взаимно перпендикулярных плоскостях относительно неподвижного облучателя, определяют сигналы, пропорциональные проекциям nх, nу, nz вектора кажущегося линейного ускорения движения и проекциям ωx, ωy, ωz вектора абсолютной угловой скорости поворота вектора визирования цели на соответствующие координатные оси базовой антенной системы координат Oxyz, с учетом следующих соотношений:
кажущегося линейного ускорения движения и проекциям ωзх, ωзy, ωзz вектора абсолютной угловой скорости поворота зеркала антенны на соответствующие координатные оси системы координат Охзyзzз, связанной с зеркалом антенны, где ось Охз - оптическая ось зеркала. По этим измеренным сигналам, принимая во внимание функциональную зависимость (переменную электрическую редукцию) между углами поворота подвижного зеркала и углами поворота линии визирования (диаграммы направленности (луча) антенны) при вращении зеркала в двух взаимно перпендикулярных плоскостях относительно неподвижного облучателя, определяют сигналы, пропорциональные проекциям nх, nу, nz вектора кажущегося линейного ускорения движения и проекциям ωx, ωy, ωz вектора абсолютной угловой скорости поворота вектора визирования цели на соответствующие координатные оси базовой антенной системы координат Oxyz, с учетом следующих соотношений:
где
εН, εА - углы поворота вектора визирования цели соответственно по углу наклона и по азимуту;
 ,
,  - углы поворота зеркала антенны соответственно по углу наклона и по азимуту.
- углы поворота зеркала антенны соответственно по углу наклона и по азимуту.
По полученным сигналам при заданных начальной информации назначения цели или/и ОВ и начальных условий выставки инерциального измерения параметров вектора визирования формируют сигналы, пропорциональные текущим значениям параметров вектора визирования цели, а именно: проекций Vx, Vy, Vz вектора абсолютной линейной скорости сближения подвижного носителя с целью на соответствующие координатные оси базовой антенной системы координат Oxyz, наклонной дальности L сближения подвижного носителя с целью, составляющих е1 и е2 пространственной угловой координаты цели в базовой антенной системе координат Oxyz, направляющих косинусов βjk, где j, k = 1, 2, 3, взаимного углового положения базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Сξ0η0ζ0 (фиг.1), разрешая следующий алгоритм работы инерциального измерения параметров вектора визирования цели, приводимый в векторной форме:
где




При отсутствии локационного контакта с ОВ преобразуют полученные сигналы, пропорциональные соответствующим текущим значениям параметров вектора визирования цели, в управляющие сигналы, по которым осуществляют поворот зеркала антенны по углу наклона  и по азимуту
и по азимуту  относительно корпуса подвижного носителя, которые и преобразуют с учетом переменной электрической редукции в сигналы, пропорциональные углам поворота вектора (линии) визирования по углу наклона (места) и по азимуту относительно корпуса подвижного носителя до совмещения его направления с направлением на цель, и совмещают метку (подвижный строб) дальности с целью. При этом формируют сигналы, пропорциональные скорости изменения углов визирования цели в горизонтальной
относительно корпуса подвижного носителя, которые и преобразуют с учетом переменной электрической редукции в сигналы, пропорциональные углам поворота вектора (линии) визирования по углу наклона (места) и по азимуту относительно корпуса подвижного носителя до совмещения его направления с направлением на цель, и совмещают метку (подвижный строб) дальности с целью. При этом формируют сигналы, пропорциональные скорости изменения углов визирования цели в горизонтальной  и в вертикальной
и в вертикальной  плоскости в системе координат Оξηζ (фиг.3), а также сигналы, пропорциональные скорости изменения угла наклона
плоскости в системе координат Оξηζ (фиг.3), а также сигналы, пропорциональные скорости изменения угла наклона  и азимута
и азимута  (скорости изменения пеленгов цели) в связанной системе координат Ox1y1z1 (фиг.4). Одновременно преобразуют сигналы, пропорциональные проекциям ωx, ωy, ωz вектора абсолютной угловой скорости поворота базовой антенной системы координат Oxyz, в сигналы, пропорциональные его проекциям
(скорости изменения пеленгов цели) в связанной системе координат Ox1y1z1 (фиг.4). Одновременно преобразуют сигналы, пропорциональные проекциям ωx, ωy, ωz вектора абсолютной угловой скорости поворота базовой антенной системы координат Oxyz, в сигналы, пропорциональные его проекциям 

 на соответствующие координатные оси связанной системы координат Ox1y1z1.
на соответствующие координатные оси связанной системы координат Ox1y1z1.
Затем определяют сигналы, пропорциональные скорости изменения соответственно рыскания , тангажа , крена подвижного носителя согласно алгоритму, приводимому в обобщенном виде:

Интегрируя полученные сигналы при начальных значениях ψ0, ϑ0, γ0, заданных при предстартовой подготовке подвижного носителя, формируют сигналы, пропорциональные соответственно текущим значениям рыскания ψ, тангажа ϑ и крена γ. При этом определяют сигналы, пропорциональные проекциям 

 вектора
вектора  углового ускорения подвижного носителя на соответствующие координатные оси связанной системы координат Ox1y1z1. Наконец, по полученным сигналам формируют сигналы стабилизации подвижного носителя от его колебаний относительно своего центра масс в горизонтальной плоскости δг, в вертикальной плоскости δв и по крену δк, а также сигналы самонаведения подвижного носителя на цель, пропорциональные перегрузкам nв и nг, которые являются функциями, например, текущих значений сформированных углов положения подвижного носителя в вертикальной плоскости и в горизонтальной плоскости, функциями текущих значений модуля
углового ускорения подвижного носителя на соответствующие координатные оси связанной системы координат Ox1y1z1. Наконец, по полученным сигналам формируют сигналы стабилизации подвижного носителя от его колебаний относительно своего центра масс в горизонтальной плоскости δг, в вертикальной плоскости δв и по крену δк, а также сигналы самонаведения подвижного носителя на цель, пропорциональные перегрузкам nв и nг, которые являются функциями, например, текущих значений сформированных углов положения подвижного носителя в вертикальной плоскости и в горизонтальной плоскости, функциями текущих значений модуля  наклонной скорости сближения подвижного носителя с целью и составляющих и вектора
наклонной скорости сближения подвижного носителя с целью и составляющих и вектора  угловой скорости поворота вектора (линии) визирования цели соответственно в вертикальной и в горизонтальной плоскости в системе координат Оξηζ. Полученную информацию преобразуют в управляющие сигналы, которые поступают в виде информационного массива стабилизации и управления по информационной линии связи во внешнюю аппаратуру управления рулевым приводом подвижного носителя.
угловой скорости поворота вектора (линии) визирования цели соответственно в вертикальной и в горизонтальной плоскости в системе координат Оξηζ. Полученную информацию преобразуют в управляющие сигналы, которые поступают в виде информационного массива стабилизации и управления по информационной линии связи во внешнюю аппаратуру управления рулевым приводом подвижного носителя.
При достижении значения наклонной дальности сближения подвижного носителя с целью, равной величине наклонной дальности возможного локационного контакта с ОВ, излучают последовательно сначала зондирующие сигналы основного диапазона волн и затем встроенного более коротковолнового диапазона волн согласно принятой логике поиска ОВ. При этом частота более коротковолнового диапазона волн превышает в четное число раз частоту основного диапазона волн, линейная поляризация основного диапазона волн ортогональна по отношению к линейной поляризации основного диапазона волн, а линии визирования встроенного и основного каналов излучения совмещают между собой и с начальной юстировкой обоих каналов излучения со строительными осями подвижного носителя, причем управление направлением совмещенной линии визирования отрабатывают одним и тем же приводом зеркала антенны основного диапазона волн. Затем осуществляют секторный поиск ОВ по направлению и поиск ОВ по дальности. Принимают отраженные от облучаемых ОВ сигналы, находящиеся в пределах сектора поиска ОВ по направлению и в зоне поиска ОВ по дальности, производят по основному или по встроенному более коротковолновому диапазону обнаружение, выбор и захват ОВ, выбранного из всех обнаруженных в секторе поиска ОВ согласно принятым критериям выбора, на автосопровождение по дальности и по направлению, совмещают информацию, полученную в результате первичной обработки принимаемых отраженных от облучаемого ОВ высокочастотных сигналов по основному или встроенному диапазону волн, подвергают полученные сигналы вторичной (низкочастотной) обработке. В результате этого формируют сигналы рассогласования (ошибки)  и
и  автосопровождения соответственно по углу наклона и по азимуту по основному или по встроенному каналу излучения, которые пропорциональны составляющим e1 и е2 пространственной угловой координаты облучаемого ОВ, и сигнал, пропорциональный наклонной дальности L до ОВ, в антенной системе координат Oxyz (фиг.2). При этом по сигналам, пропорциональным измеренным значениям проекций nx, ny, nz вектора кажущегося линейного ускорения движения и проекций ωx, ωy, ωz вектора абсолютной угловой скорости поворота вектора (линии) визирования цели на соответствующие координатные оси базовой антенной системы координат Ox0y0z0, фиксированной в момент времени начала поиска ОВ на заданный интервал времени разрешения, с учетом вектора с линейного смещения фазового центра антенны (или/и центра излучения зондирующих сигналов) относительно центра пересечения осей чувствительности измерения проекций nx, ny, nz вектора кажущегося линейного ускорения и проекций ωx, ωy, ωz вектора абсолютной угловой скорости поворота вектора визирования цели, определяют сигналы, пропорциональные параметрам траекторных флюктуации и деформирующих (упругих, вибрационных и т.п.) воздействий корпуса подвижного носителя на пространственное положение фазового центра антенны (или/и центра излучения зондирующих сигналов) относительно цели или/и ОВ. Причем измеряют сигналы, пропорциональные параметрам движения апертуры антенны относительно наблюдаемого (визируемого) объекта, т.е. цели или/и ОВ, которые являются параметрами траекторного сигнала в системе координат Oxсмyсмzсм, смещенной относительно фиксированной базовой антенной системы координат Ox0y0z0 на некоторое расстояние, т.е. относительно фазового центра антенны. Указанные параметры определяют путем решения алгоритма работы инерциального измерения параметров вектора визирования цели или/и ОВ, позволяющего по сигналам, пропорциональным значениям проекций nx, ny, nz и значениям проекций ωx, ωy, ωz определять относительно плоскости апертуры антенны параметры вектора визирования цели или/и ОВ, согласованные с параметрами траекторного сигнала, т.е. путем решения следующего алгоритма, приводимого в векторной форме:
автосопровождения соответственно по углу наклона и по азимуту по основному или по встроенному каналу излучения, которые пропорциональны составляющим e1 и е2 пространственной угловой координаты облучаемого ОВ, и сигнал, пропорциональный наклонной дальности L до ОВ, в антенной системе координат Oxyz (фиг.2). При этом по сигналам, пропорциональным измеренным значениям проекций nx, ny, nz вектора кажущегося линейного ускорения движения и проекций ωx, ωy, ωz вектора абсолютной угловой скорости поворота вектора (линии) визирования цели на соответствующие координатные оси базовой антенной системы координат Ox0y0z0, фиксированной в момент времени начала поиска ОВ на заданный интервал времени разрешения, с учетом вектора с линейного смещения фазового центра антенны (или/и центра излучения зондирующих сигналов) относительно центра пересечения осей чувствительности измерения проекций nx, ny, nz вектора кажущегося линейного ускорения и проекций ωx, ωy, ωz вектора абсолютной угловой скорости поворота вектора визирования цели, определяют сигналы, пропорциональные параметрам траекторных флюктуации и деформирующих (упругих, вибрационных и т.п.) воздействий корпуса подвижного носителя на пространственное положение фазового центра антенны (или/и центра излучения зондирующих сигналов) относительно цели или/и ОВ. Причем измеряют сигналы, пропорциональные параметрам движения апертуры антенны относительно наблюдаемого (визируемого) объекта, т.е. цели или/и ОВ, которые являются параметрами траекторного сигнала в системе координат Oxсмyсмzсм, смещенной относительно фиксированной базовой антенной системы координат Ox0y0z0 на некоторое расстояние, т.е. относительно фазового центра антенны. Указанные параметры определяют путем решения алгоритма работы инерциального измерения параметров вектора визирования цели или/и ОВ, позволяющего по сигналам, пропорциональным значениям проекций nx, ny, nz и значениям проекций ωx, ωy, ωz определять относительно плоскости апертуры антенны параметры вектора визирования цели или/и ОВ, согласованные с параметрами траекторного сигнала, т.е. путем решения следующего алгоритма, приводимого в векторной форме:
где
k1, k2 - коэффициенты демпфирования и изменения собственной частоты ошибок определения параметров движения фазового центра антенны, причем при индикации помех коэффициенты k1 и k2 обнуляются;
- вектор линейной скорости движения фазового центра антенны относительно цели;
- вектор визирования наблюдаемого объекта;
 - орт вектора ;
- орт вектора ;
 - вектор относительной линейной скорости подвижного носителя и, следовательно, фазового центра антенны, измеренный дальномерным каналом устройства автосопровождения по дальности и характеризующий линейную скорость движения подвижного носителя относительно цели или/и ОВ.
- вектор относительной линейной скорости подвижного носителя и, следовательно, фазового центра антенны, измеренный дальномерным каналом устройства автосопровождения по дальности и характеризующий линейную скорость движения подвижного носителя относительно цели или/и ОВ.
Коррекция в приведенном алгоритме по сигналу, пропорциональному составляющим вектора  , необходима для уменьшения влияния на точность определения параметров движения фазового центра антенны инструментальных погрешностей однокомпонентных измерителей линейного ускорения и измерителей угловой скорости, а также ошибок задания параметров начальной выставки инерциального измерения параметров вектора визирования и методических ошибок, связанных, в частности, с неучетом рельефа земной поверхности. При этом вектор
, необходима для уменьшения влияния на точность определения параметров движения фазового центра антенны инструментальных погрешностей однокомпонентных измерителей линейного ускорения и измерителей угловой скорости, а также ошибок задания параметров начальной выставки инерциального измерения параметров вектора визирования и методических ошибок, связанных, в частности, с неучетом рельефа земной поверхности. При этом вектор  смещения определяют согласно алгоритму:
смещения определяют согласно алгоритму:

где
 - радиус-вектор фазового центра антенны в системе координат осей чувствительности измерения проекций nx, ny, nz вектора кажущегося линейного ускорения и проекций ωx, ωy, ωz вектора абсолютной угловой скорости поворота вектора (линии) визирования цели или/и ОВ.
- радиус-вектор фазового центра антенны в системе координат осей чувствительности измерения проекций nx, ny, nz вектора кажущегося линейного ускорения и проекций ωx, ωy, ωz вектора абсолютной угловой скорости поворота вектора (линии) визирования цели или/и ОВ.
Приведенный алгоритм в векторной форме представляет собой замкнутую систему векторных дифференциальных уравнений в базовой антенной системе координат Ox0y0z0, фиксированной, например, в течение поиска ОВ на заданный интервал времени разрешения при начальных значениях параметров  ,
,  ,
,  , которые вводят в алгоритм в момент времени t0 начала поиска ОВ (или начала заданного интервала времени разрешения), определяют необходимые для формирования сигнала, пропорционального фазе опорной функции, сигналы, пропорциональные значениям радиальной скорости
, которые вводят в алгоритм в момент времени t0 начала поиска ОВ (или начала заданного интервала времени разрешения), определяют необходимые для формирования сигнала, пропорционального фазе опорной функции, сигналы, пропорциональные значениям радиальной скорости  и радиального ускорения
и радиального ускорения  , согласно алгоритму:
, согласно алгоритму:

Далее формируют сигнал, пропорциональный фазе опорной функции по алгоритму:

где
λ - длина волны излучаемых зондирующих сигналов;
t - время поиска ОВ (или время разрешения).
И, наконец, формируют сигнал, пропорциональный фазовой поправке Δϕ, компенсирующей траекторные нестабильности фазового центра антенны в принимаемых сигналах, отраженных от облучаемой земной поверхности в месте, где задана цель, или/и в отраженных от облучаемого ОВ, согласно алгоритму:
Фазовый центр антенны (или/и центр излучения зондирующих сигналов) занимает неподвижное положение, когда подвижный носитель находится в статическом состоянии. Во время движения подвижного носителя под воздействием упругих, вибрационных и т.п. колебаний корпуса подвижного носителя фазовый центр антенны совершает ложные колебательные движения, математически определяемые относительно его статического положения вектором смещения  , который остается постоянным в базовой антенной системе координат Oxyz. При этом указанные деформирующие (упругие, вибрационные и т.п.) воздействия физически проявляются в виде составляющих погрешностей однокомпонентных измерителей линейного ускорения и измерителей проекций вектора абсолютной угловой скорости, что позволяет решать задачу их коррекции (компенсации) путем реализации алгоритмов комплексирования информации инерциального измерения параметров вектора визирования цели или/и ОВ и информации радиолокационного автосопровождения ОВ по направлению и по дальности. Амплитудные искажения принимаемых сигналов, отраженных от ОВ, компенсируют путем гиростабилизации вектора (линии) визирования цели или/и ОВ.
, который остается постоянным в базовой антенной системе координат Oxyz. При этом указанные деформирующие (упругие, вибрационные и т.п.) воздействия физически проявляются в виде составляющих погрешностей однокомпонентных измерителей линейного ускорения и измерителей проекций вектора абсолютной угловой скорости, что позволяет решать задачу их коррекции (компенсации) путем реализации алгоритмов комплексирования информации инерциального измерения параметров вектора визирования цели или/и ОВ и информации радиолокационного автосопровождения ОВ по направлению и по дальности. Амплитудные искажения принимаемых сигналов, отраженных от ОВ, компенсируют путем гиростабилизации вектора (линии) визирования цели или/и ОВ.
При автосопровождении ОВ по направлению и по дальности сравнивают сформированные сигналы, пропорциональные текущим значениям параметров вектора визирования цели в базовой антенной системе координат Oxyz, а именно: составляющих e1 и е2 пространственной угловой координаты цели или/и ОВ и наклонной дальности Lц (или приращение дальности ΔLц) сближения подвижного носителя с целью или/и с ОВ, соответственно с идентичными сигналами автосопровождения ОВ по направлению и по дальности, пропорциональными текущим значениям параметров вектора визирования ОВ в базовой антенной системе координат Oxyz, а именно: составляющим е1 и е2 пространственной угловой координаты  ОВ и наклонной дальности LОВ (или приращения дальности ΔLОВ) сближения подвижного носителя с ОВ, осуществляют оптимальную адаптивную помехоустойчивую фильтрацию соответствующих сигналов сравнения, формируя сигналы, пропорциональные соответственно текущим значениям параметров вектора визирования цели. По сигналам, полученным в результате компенсации (коррекции), формируют управляющие сигналы, по которым производят поворот зеркала антенны по углу наклона и по азимуту относительно корпуса подвижного носителя, регистрируют их и преобразуют с учетом переменной электрической редукции в сигналы, пропорциональные углам поворота вектора (линии) визирования по углу наклона εН и по азимуту εА относительно корпуса подвижного носителя до совмещения его направления с направлением на ОВ, а при автосопровождении по дальности отфильтрованный сигнал рассогласования (ошибки) интегрируют во времени и получают информацию о наклонной дальности и скорости сближения подвижного носителя с ОВ. Одновременно формируют сигналы, пропорциональные скорости изменения соответственно углов визирования ОВ в горизонтальной
ОВ и наклонной дальности LОВ (или приращения дальности ΔLОВ) сближения подвижного носителя с ОВ, осуществляют оптимальную адаптивную помехоустойчивую фильтрацию соответствующих сигналов сравнения, формируя сигналы, пропорциональные соответственно текущим значениям параметров вектора визирования цели. По сигналам, полученным в результате компенсации (коррекции), формируют управляющие сигналы, по которым производят поворот зеркала антенны по углу наклона и по азимуту относительно корпуса подвижного носителя, регистрируют их и преобразуют с учетом переменной электрической редукции в сигналы, пропорциональные углам поворота вектора (линии) визирования по углу наклона εН и по азимуту εА относительно корпуса подвижного носителя до совмещения его направления с направлением на ОВ, а при автосопровождении по дальности отфильтрованный сигнал рассогласования (ошибки) интегрируют во времени и получают информацию о наклонной дальности и скорости сближения подвижного носителя с ОВ. Одновременно формируют сигналы, пропорциональные скорости изменения соответственно углов визирования ОВ в горизонтальной  и в вертикальной
и в вертикальной  плоскости в системе координат Оξηζ, сигналы стабилизации подвижного носителя от его колебаний относительно своего центра масс в горизонтальной плоскости δг, в вертикальной плоскости δв и по крену δк, а также сигналы самонаведения подвижного носителя на ОВ, пропорциональные перегрузкам соответственно в горизонтальной nг и в вертикальной nв плоскости, которые являются функциями, например, текущих значений модуля скорости изменения наклонной дальности сближения подвижного носителя с ОВ соответственно и скорости изменения углов визирования ОВ в горизонтальной и вертикальной плоскости. Преобразуют полученные сигналы в сигналы управления рулевым приводом подвижного носителя, обеспечивая стабилизацию и самонаведение подвижного носителя на ОВ согласно принятому закону самонаведения.
плоскости в системе координат Оξηζ, сигналы стабилизации подвижного носителя от его колебаний относительно своего центра масс в горизонтальной плоскости δг, в вертикальной плоскости δв и по крену δк, а также сигналы самонаведения подвижного носителя на ОВ, пропорциональные перегрузкам соответственно в горизонтальной nг и в вертикальной nв плоскости, которые являются функциями, например, текущих значений модуля скорости изменения наклонной дальности сближения подвижного носителя с ОВ соответственно и скорости изменения углов визирования ОВ в горизонтальной и вертикальной плоскости. Преобразуют полученные сигналы в сигналы управления рулевым приводом подвижного носителя, обеспечивая стабилизацию и самонаведение подвижного носителя на ОВ согласно принятому закону самонаведения.
Предлагаемая бортовая система самонаведения подвижного носителя (фиг.6) содержит параболическое зеркало 1, которое имеет возможность вращения относительно центра излучения неподвижного многоканального облучателя 2 с линейной поляризацией, жестко установленного на корпусе подвижного носителя. Параболическое зеркало 1 с помощью шарнирно закрепленных жестких тяг соединено с внутренней рамкой и с наружной рамкой двухосного карданова подвеса, причем во внутренней рамке установлен чувствительный и исполнительный элемент 3 следящего гиропривода параболического зеркала 1, в качестве которого применен трехстепенной двухканальный гироскоп. Кроме того, предлагаемая система содержит датчик угла поворота 4 наружной рамки двухосного карданова подвеса, установленный на корпусе подвижного носителя и механически связанный с ее осью 5 вращения, и датчик угла поворота 6 внутренней рамки двухосного карданова подвеса, установленный на наружной рамке и механически связанный с осью вращения 7 внутренней рамки. В систему также входят однокомпонентные измерители линейного ускорения 8, 9 и 10. Предлагаемая система включает в свой состав устройство 11 управления направлением и гиростабилизации линии визирования, механически связанное соответственно с осями 5 и 7 вращения наружной и внутренней рамок двухосного карданова подвеса, входы которого соединены соответственно с выходами датчиков углов прецессии управляемого трехстепенного двухканального гироскопа 3, два входа управления которого соединены выходами устройства 11 управления направлением и гиростабилизации линии визирования.
Предлагаемая бортовая система самонаведения содержит соединенный с многоканальным облучателем 2 СРП 12 СВЧ-сигналов, выходы которого через ВКУ 13 соединены с приемопередатчиком 14, причем на входы управления ВКУ 13 поступают сигналы сканирования. На выходе приемопередатчика 14 формируется видеосигнал (ВС).
С выходов датчиков углов поворота 4 и 6 наружной и внутренней рамки двухосного карданова подвеса выдаются управляющие сигналы пеленгов ОВ соответственно по углу наклона εН и по азимуту εА для формирования принятого закона самонаведения подвижного носителя на ОВ.
В предлагаемой системе дополнительно введен двухканальный гироскопический датчик угловой скорости (ДУС) 15, установленный во внутренней рамке двухосного карданова подвеса параболического зеркала 1 так, что в заарретированном положении одна из его осей чувствительности совпадает с нулевым направлением вектора (линии) визирования, а другая его ось чувствительности ориентирована, например, вверх вдоль положительного направления оси вращения 7 внутренней рамки двухосного карданова подвеса параболического зеркала 1. При этом кинетический момент ротора гироскопического ДУС 15 совпадает с положительным направлением оси вращения 5 наружной рамки двухосного карданова подвеса.
Все три однокомпонентных измерителя 8, 9, 10 линейного ускорения установлены во внутренней рамке двухосного карданова подвеса параболического зеркала 1, а ось чувствительности одного из них взаимно ортогональна по отношению к взаимно ортогональным осям чувствительности двух других однокомпонентных измерителей линейного ускорения. Ось чувствительности одного из трех однокомпонентных измерителей линейного ускорения совпадает в заарретированном положении с нулевым направлением линии визирования. При этом гироскоп 3, гироскопический ДУС 15 и три измерителя линейного ускорения 8, 9, 10 образуют блок измерения инерциального канала предлагаемой системы (фиг.6). Расстояние между каждым из шарниров жестких тяг, размещенных на параболическом зеркале 1, и центром вращения параболического зеркала равно расстоянию между каждым из шарниров, установленных соответственно на наружной рамке и на внутренней рамке двухосного карданова подвеса параболического зеркала 1, и центром вращения этих рамок. Кроме того, предлагаемая система дополнительно содержит радионавигационный приемоизмеритель 16, цифровое вычислительное устройство (ЦВУ) 17, а также малое гиперболическое решетчатое зеркало 18 диаметром в несколько раз меньше по сравнению с основным параболическим зеркалом 1, жестко связанное с помощью неподвижных волноводов с корпусом подвижного носителя предлагаемой системы. Один из фокусов F1 малого гиперболического решетчатого зеркала 18, являющийся дальним по отношению к основному параболическому зеркалу 1, совпадает с фокусом параболического зеркала 1, а в другом фокусе F2 малого гиперболического решетчатого зеркала 18, который является ближним по отношению к основному параболическому зеркалу 1, размещен фазовый центр антенны или/и центр излучения неподвижного многоканального облучателя 2 прямого облучения основного диапазона волн с линейной поляризацией, совпадающей с направлением проводников решетки малого гиперболического зеркала 18. В дальнем фокусе F1 малого гиперболического решетчатого зеркала 18 установлен центр излучения многоканального облучателя 19 прямого облучения более коротковолнового диапазона волн с линейной поляризацией, ортогональной относительно направления проводников решетки малого гиперболического зеркала 18, который жестко связан с корпусом подвижного носителя с помощью неподвижных волноводов, соединяющихся с дополнительно введенным в предлагаемую систему СРП 20 СВЧ-сигналов более коротковолнового диапазона волн. СРП 20 соединен с дополнительно введенным ВКУ 21 более коротковолнового диапазона волн, управляемым сигналами сканирования. При этом приемопередатчик 14 выполнен двухдиапазонным для основного и более коротковолнового диапазона волн. Соответствующие высокочастотные входы приемопередатчика 14 с помощью волноводов соединены с дополнительно введенным ВКУ 21 более коротковолнового диапазона волн, подключенного своими входами также с помощью волноводов к дополнительно введенному СРП 20 СВЧ-сигналов более коротковолнового диапазона волн. Параболическое зеркало 1 и гиперболическое зеркало 18 вместе с облучателями 2 и 19, а также СРП 12 и 20, ВКУ 13 и 21, приемопередатчик 14 образуют антенно-волноводный приемопередающий модуль предлагаемой бортовой системы самонаведения подвижного носителя. В предлагаемой бортовой системе самонаведения выходы трех однокомпонентных измерителей линейного ускорения 8, 9, 10, выходы датчиков угла поворота 4 и 6 соответственно наружной и внутренней рамок двухосного карданова подвеса, выходы двухканального гироскопического ДУС 15, выходы устройства 11 управления направлением и гиростабилизации линии (вектора) визирования, а также выход ВС двухдиапазонного приемопередатчика 14 соединены с соответствующими входами ЦВУ 17, а выходы сигналов рассогласования (ошибки) систем автосопровождения по углу наклона и по азимуту ЦВУ 17 соединены с соответствующими входами устройства 11 управления направлением и гиростабилизации линии (вектора) визирования.
Информационный вход ЦВУ 17 соединен информационной линией связи 22 с радионавигационным приемоизмерителем 16 сигналов спутниковой системы навигации. При этом по данной информационной линии связи 22 в ЦВУ 17 поступает информационный массив сигналов коррекции предлагаемой бортовой системы самонаведения. Другой информационный вход ЦВУ 17 соединен информационной линией связи 23 с внешней аппаратурой подготовки и управления пуском подвижного носителя предлагаемой системы самонаведения. По информационной линии связи 23 в ЦВУ 17 поступает информационный массив предстартового начального назначения ОВ или/и цели и начальной выставки инерциального измерения параметров вектора визирования.
При этом по одному из информационных выходов ЦВУ 17 по информационной линии связи 24 выдается информационный массив команд и сигналов управления высокочастотной частью предлагаемой бортовой системы самонаведения, а другой информационный выход ЦВУ 17 соединен информационной линией связи 25 с внешней аппаратурой управления рулевым приводом подвижного носителя. По информационной линии связи 25 из ЦВУ 17 выдается информационный массив управления и стабилизации подвижного носителя от колебаний его относительно своего центра масс, обеспечивая тем самым самонаведение подвижного носителя на ОВ согласно принятому закону самонаведения.
Радионавигационный приемоизмеритель 16 выдает по стандартному интерфейсу в ЦВУ 17 навигационную информацию, имеет встроенное программное обеспечение выработки корректирующей информации для инерциального измерения параметров вектора визирования цели или/и ОВ при одновременной выдаче в ЦВУ 17 высокоточной временной метки.
Он включает в свой состав антенну, приемный модуль и устройство обработки принимаемых сигналов и предназначен для определения текущих координат места, высоты, путевой скорости и времени с высокой точностью по сигналам спутниковой системы навигации в любой точке земного шара и околоземного пространства, в любой момент времени и независимо от метеоусловий.
Работа предлагаемой бортовой системы самонаведения подвижного носителя осуществляется следующим образом.
При предстартовой подготовке и управлении пуском подвижного носителя предлагаемой бортовой системы самонаведения в режиме начальной выставки и начального назначения цели или/и ОВ на информационный вход ЦВУ 17 по информационной линии связи 23 (по каналу ARING 429) из внешней аппаратуры подготовки и управления пуском на приемник последовательного кода поступает информационный массив, состоящий, например, из 20-ти 32-разрядных слов:
- контрольное слово;
- L0 - начальное значение наклонной дальности сближения подвижного носителя с целью или/и ОВ;
-  - начальное значение скорости изменения наклонной дальности сближения подвижного носителя с целью или/и ОВ;
- начальное значение скорости изменения наклонной дальности сближения подвижного носителя с целью или/и ОВ;
- 

 - начальные значения проекций вектора
- начальные значения проекций вектора  линейной скорости подвижного носителя на координатные оси горизонтальной системы координат Оξηζ (фиг.1);
линейной скорости подвижного носителя на координатные оси горизонтальной системы координат Оξηζ (фиг.1);
- ξ0, η0, ζ0 - начальные значения декартовых координат цели или/и ОВ в горизонтальной системе координат Оξηζ;
- λ0, ϕ0 - начальные значения географической долготы и широты подвижного носителя в момент его старта (фиг.1);
- ψ0, ϑ0, γ0 - начальное значение рыскания, тангажа, крена подвижного носителя в момент его старта (фиг.5);
- 
 - начальные значения угла места (наклона) и азимута цели или/и ОВ, т.е. «вертикальный» и «горизонтальный» пеленг в связанной с подвижным носителем системе координат Ox1y1z1 (фиг.4);
- начальные значения угла места (наклона) и азимута цели или/и ОВ, т.е. «вертикальный» и «горизонтальный» пеленг в связанной с подвижным носителем системе координат Ox1y1z1 (фиг.4);
- LПП - наклонная дальность, при достижении которой выдается КПП, по которой реализуется в аппаратуре управления рулевым приводом подвижного носителя его снижение (планирование) и выход на маловысотный конечный участок траектории перемещения к ОВ (первая программная дальность);
- LВП - наклонная дальность включения приемопередатчика 14 на конечном участке траектории подвижного носителя (вторая программная дальность);
- командное слово, содержащее, например, 15 режимных команд, каждая из которых записывается в соответствующем разряде слова в виде «1» для каждого режима пуска подвижного носителя.
Этот информационный массив по мере изменения взаимного положения подвижного носителя и цели или/и ОВ непрерывно обновляется и перезаписывается. При этом по этой начальной информации в ЦВУ 17 реализуется алгоритм формирования начальных условий выставки инерциального измерения параметров вектора визирования цели или/и ОВ в антенной базовой системе координат Oxyz, а именно:
- 
 - начальные значения горизонтального и вертикального углов визирования цели или/и ОВ в горизонтальной системе координат Оξηζ (фиг.3);
- начальные значения горизонтального и вертикального углов визирования цели или/и ОВ в горизонтальной системе координат Оξηζ (фиг.3);
- 

 - начальные значения проекций вектора линейной скорости подвижного носителя на координатные оси антенной базовой системы координат Oxyz (фиг.2);
- начальные значения проекций вектора линейной скорости подвижного носителя на координатные оси антенной базовой системы координат Oxyz (фиг.2);
- 
 - начальные значения составляющих пространственной угловой координаты цели или/и ОВ в антенной базовой системе координат Oxyz (фиг.2);
- начальные значения составляющих пространственной угловой координаты цели или/и ОВ в антенной базовой системе координат Oxyz (фиг.2);
- 
 - начальные значения географической долготы и широты цели или/и ОВ в момент старта подвижного носителя (фиг.1);
- начальные значения географической долготы и широты цели или/и ОВ в момент старта подвижного носителя (фиг.1);
-  - матрица начальных значений направляющих косинусов, определяющих взаимное положение антенной базовой системы координат Oxyz и опорной геоцентрической системы координат Сξ0η0ζ0, одна координатная ось которой связана с целью или/и ОВ, причем С - центр земного сфероида (фиг.1).
- матрица начальных значений направляющих косинусов, определяющих взаимное положение антенной базовой системы координат Oxyz и опорной геоцентрической системы координат Сξ0η0ζ0, одна координатная ось которой связана с целью или/и ОВ, причем С - центр земного сфероида (фиг.1).
В момент старта подвижного носителя поступление в ЦВУ 17 информационного массива предстартового начального назначения цели и начальной выставки инерциального измерения параметров вектора визирования прекращается. Одновременно с этим разарретируются управляемый трехстепенной гироскоп 3, гироскопический ДУС 15, измерители линейного ускорения 8, 9, 10 и включается процесс инерциального измерения параметров вектора визирования цели, алгоритм функционирования которого реализуется в ЦВУ 17. При этом по сигналам, пропорциональным nx, ny, nz и ωx, ωy, ωz, в ЦВУ 17 вычисляются текущие значения параметров: 





 (где j, k = 1, 2, 3) и Vx, Vy, Vz, Lц,
(где j, k = 1, 2, 3) и Vx, Vy, Vz, Lц, 
 βjk,(где j, k = 1, 2, 3), а также составляющие e1 и е2 пространственной угловой координаты
βjk,(где j, k = 1, 2, 3), а также составляющие e1 и е2 пространственной угловой координаты  цели, являющиеся сигналами рассогласования (ошибки) между направлением линии (вектора) визирования и направлением на цель в антенной базовой системе координат Oxyz, которые в ЦВУ 17 преобразуются в сигналы, пропорциональные е1з и е2з соответственно, и выдаются для отработки в устройство 11, где формируются соответствующие управляющие токи Iг и Iв, которые подаются на обмотки соответствующих датчиков момента гироскопа 3 и которые пропорциональны угловой скорости
цели, являющиеся сигналами рассогласования (ошибки) между направлением линии (вектора) визирования и направлением на цель в антенной базовой системе координат Oxyz, которые в ЦВУ 17 преобразуются в сигналы, пропорциональные е1з и е2з соответственно, и выдаются для отработки в устройство 11, где формируются соответствующие управляющие токи Iг и Iв, которые подаются на обмотки соответствующих датчиков момента гироскопа 3 и которые пропорциональны угловой скорости  и
и  поворота параболического зеркала 1 соответственно в горизонтальной плоскости и в вертикальной плоскости в горизонтальной системе координат Оξηζ. Углы поворота параболического зеркала 1 регистрируют датчик 4 угла наклона и датчик 6 азимута, установленные на соответствующих рамках двухосного карданова подвеса зеркала 1.
поворота параболического зеркала 1 соответственно в горизонтальной плоскости и в вертикальной плоскости в горизонтальной системе координат Оξηζ. Углы поворота параболического зеркала 1 регистрируют датчик 4 угла наклона и датчик 6 азимута, установленные на соответствующих рамках двухосного карданова подвеса зеркала 1.
Напряжения, пропорциональные углу  и углу
и углу  с выхода датчика угла наклона 4 и с выхода датчика азимута 6 поступают в устройство 11 как сигналы отработки и в ЦВУ 17, где преобразуются в сигналы, пропорциональные соответственно углам поворота линии (вектора) визирования в направлении на цель (фиг.4) по наклону
с выхода датчика угла наклона 4 и с выхода датчика азимута 6 поступают в устройство 11 как сигналы отработки и в ЦВУ 17, где преобразуются в сигналы, пропорциональные соответственно углам поворота линии (вектора) визирования в направлении на цель (фиг.4) по наклону  и по азимуту
и по азимуту  в связанной системе координат Ox1y1z1, т.е. относительно корпуса подвижного носителя.
в связанной системе координат Ox1y1z1, т.е. относительно корпуса подвижного носителя.
Одновременно с этим сигналы, пропорциональные  и
и  с выходов соответствующих усилителей мощности устройства 11 поступают на соответствующие входы ЦВУ 17, где преобразуются в сигналы, пропорциональные угловой скорости поворота линии
с выходов соответствующих усилителей мощности устройства 11 поступают на соответствующие входы ЦВУ 17, где преобразуются в сигналы, пропорциональные угловой скорости поворота линии  (вектора) визирования в вертикальной плоскости
(вектора) визирования в вертикальной плоскости  в горизонтальной плоскости
в горизонтальной плоскости  в горизонтальной системе координат Оξηζ (фиг.3).
в горизонтальной системе координат Оξηζ (фиг.3).
Кроме того, в ЦВУ 17 по сигналам, пропорциональным 

 и
и 


 выдаваемым в ЦВУ 17, формируются сигналы, пропорциональные
выдаваемым в ЦВУ 17, формируются сигналы, пропорциональные 


 а также ωx, ωy, ωz и
а также ωx, ωy, ωz и 

 По полученным сигналам, пропорциональным ωx, ωy, ωz, в ЦВУ 17 определяются сигналы, пропорциональные угловым скоростям колебания подвижного носителя относительно своего центра масс по рысканию , по тангажу , по крену , и затем с учетом начальных значений рыскания ψ0, тангажа ϑ0, крена γ0, заданных при предстартовой подготовке системы, формируются сигналы, пропорциональные текущим значениям рыскания ψ, тангажа ϑ и крена γ. В ЦВУ 17 также преобразуются вводимые сигналы
По полученным сигналам, пропорциональным ωx, ωy, ωz, в ЦВУ 17 определяются сигналы, пропорциональные угловым скоростям колебания подвижного носителя относительно своего центра масс по рысканию , по тангажу , по крену , и затем с учетом начальных значений рыскания ψ0, тангажа ϑ0, крена γ0, заданных при предстартовой подготовке системы, формируются сигналы, пропорциональные текущим значениям рыскания ψ, тангажа ϑ и крена γ. В ЦВУ 17 также преобразуются вводимые сигналы 

 в сигналы nx, ny, nz вторичной обработки информации. Информация, необходимая для формирования сигналов стабилизации подвижного носителя от колебаний относительно своего центра масс в горизонтальной плоскости δг, в вертикальной плоскости δв и по крену δк, а также сигналов самонаведения, пропорциональных горизонтальной перегрузке
в сигналы nx, ny, nz вторичной обработки информации. Информация, необходимая для формирования сигналов стабилизации подвижного носителя от колебаний относительно своего центра масс в горизонтальной плоскости δг, в вертикальной плоскости δв и по крену δк, а также сигналов самонаведения, пропорциональных горизонтальной перегрузке  и вертикальной перегрузке
и вертикальной перегрузке  заданных согласно принятому и заложенному в ЦВУ 17 закону самонаведения подвижного носителя, подготавливается в ЦВУ 17 на каждом интервале дискретизации.
заданных согласно принятому и заложенному в ЦВУ 17 закону самонаведения подвижного носителя, подготавливается в ЦВУ 17 на каждом интервале дискретизации.
Сформированная информация по информационной линии связи 25 из ЦВУ 17 выдается во внешнюю по отношению к предлагаемой бортовой системе самонаведения аппаратуру управления рулевым приводом подвижного носителя. В ЦВУ 17 с момента старта подвижного носителя предлагаемой системы реализованы алгоритмы аналитической ориентации антенной базовой системы координат Oxyz (фиг.1) в направлении цели, в которой интегрируется система дифференциальных уравнений первого порядка, определяющая алгоритм работы инерциального измерения параметров вектора визирования цели. Эта ориентация антенной базовой системы координат в ЦВУ 17 осуществляется на всей траектории перемещения подвижного носителя.
При достижении вычисляемого в ЦВУ 17 значения наклонной дальности Lц сближения подвижного носителя с целью величины, равной наклонной дальности LПП, которая задается во время предстартовой подготовки носителя, в ЦВУ 17 формируется команда снижения подвижного носителя (планирования) на маловысотный конечный участок траектории его движения к цели. По этой команде в ЦВУ 17 формируется для отработки во внешнем устройстве соответствующая коррекция сигнала самонаведения подвижного носителя, пропорционального перегрузке  и для выполнения данного режима движения носителя.
и для выполнения данного режима движения носителя.
При достижении подвижным носителем наклонной дальности Lц сближения его с целью, вычисляемой также в ЦВУ 17 согласно алгоритму работы инерциального измерения параметров вектора визирования цели, величины LВП, заданной во время предстартовой подготовки носителя, в ЦВУ 17 формируется команда поиска ОВ, которая выдается в устройство 11, и команда включения приемопередатчика 14 на излучение зондирующих импульсов и на прием отраженных от облучаемого ОВ импульсов. По команде «Поиск ОВ» (П), выдаваемой из ЦВУ 17 в устройство 11, параболическое зеркало 1 включается в режиме секторного качания в заданном диапазоне изменения азимутального угла  поиска ОВ относительно продольной строительной оси Ox1 подвижного носителя. При этом оптическая ось Ox параболического зеркала 1 отклонена на постоянный, наперед заданный, малый угол наклона вниз.
поиска ОВ относительно продольной строительной оси Ox1 подвижного носителя. При этом оптическая ось Ox параболического зеркала 1 отклонена на постоянный, наперед заданный, малый угол наклона вниз.
Сформированные в ЦВУ 17 параметры поиска выдаются в устройство 11 и отрабатываются параболическим зеркалом 1, реализуя установку его диаграммы направленности на заданный постоянный угол наклона - и заданный закон движения диаграммы направленности при ее секторном качании в азимутальной плоскости.
и заданный закон движения диаграммы направленности при ее секторном качании в азимутальной плоскости.
В процессе поиска ОВ в предлагаемой бортовой системе осуществляется обнаружение и выбор ОВ в соответствии с заложенными в ЦВУ 17 алгоритмами обработки виеосигнала, который поступает с выхода приемопередатчика 14 по высокочастотной линии связи на соответствующий вход ЦВУ 17.
В режиме «Поиск ОВ» в ЦВУ 17 реализуются известные алгоритмы обнаружения, выбора, захвата и перехода предлагаемой системы в режим автосопровождения ОВ по дальности и по направлению в зависимости от характеристик ОВ и/или назначения подвижного носителя предлагаемой системы.
Одновременно с реализацией в ЦВУ 17 алгоритмов обнаружения, выбора, захвата и перехода на автосопровождение ОВ в предлагаемой бортовой системе самонаведения в соответствии с заложенным в ЦВУ 17 алгоритмом определяются параметры движения фазового центра антенны (или/и центров излучения неподвижных многоканальных облучателей прямого облучения основного диапазона 2 и встроенного более коротковолнового диапазона 19) на интервале времени выполнения режима поиска ОВ (или на заданном интервале времени измерения). В условиях реального перемещения подвижного носителя и, следовательно, центра излучения зондирующих сигналов (или/и фазового центра антенны) высокочастотная часть предлагаемой системы, т.е. ее антенно-волноводный и приемопередающий модуль, подвергаются воздействию траекторных возмущений в широком спектре, включая деформирующие (упругие, вибрационные и т.п.) воздействия корпуса подвижного носителя, а также антенно-волноводного и приемопередающего модуля системы. При этом имеются также траекторные нестабильности, т.е. небольшие отклонения от некоторой заданной опорной траектории перемещения подвижного носителя предлагаемой системы, которые обусловлены как неточностью работы аппаратуры управления рулевым приводом подвижного носителя, так и различного рода случайными возмущениями при его движении, например, в турбулентной атмосфере. Для обеспечения предельно высокого линейного разрешения по азимуту необходимо знать результирующие по всем факторам изменения текущего расстояния от фазового центра антенны (или/и центра излучения облучателя 2 или облучателя 19) в зависимости от действующего диапазона волн излучения до ОВ, облучаемого в режиме поиска с точностью малых долей длины волны излучаемой электромагнитной энергии на интервале времени поиска ОВ (или на заданном интервале времени измерения). Тем самым обусловливается необходимость в высокоточном измерении кратковременных траекторных флюктуаций центра излучения и компенсации вызванных ими искажений принимаемых отраженных от облучаемого ОВ сигналов.
Решение связанных с этим задач реализуется инерциальным измерением параметров вектора визирования облучаемого ОВ, позволяющего по сигналам однокомпонентных измерителей 8, 9, 10 линейного ускорения, а также двухканального гироскопического ДУС 15 и двухканального трехстепенного гироскопа 3, установленных во внутренней рамке двухосного карданова подвеса параболического зеркала 1 вблизи от фазового центра антенны и жестко связанных с апертурой антенны, определять в антенной базовой системе координат Oxyz параметры вектора визирования, согласованные с параметрами траекторного сигнала. Алгоритм работы высокоточного инерциального измерения траекторных флюктуаций учитывает смещение центра пересечения осей чувствительности гироинерциальных датчиков 3, 8, 9, 10, 15 относительно фазового центра антенны на некоторое расстояние (например, не более 0,3 м). Пространственное расположение этого смещения относительно фазового центра антенны в отсутствие деформирующих воздействий (упругих, вибрационных и т.п.), т.е. когда подвижный носитель находится в статике, описывается вектором  смещения с началом в центре пересечения осей чувствительности гироинерциальных датчиков 3, 8, 9, 10, 15. Фазовый центр антенны занимает неподвижное положение, когда подвижный носитель находится в статическом состоянии. Во время перемещения подвижного носителя под воздействием упругих, вибрационных и т.п. колебаний корпуса подвижного носителя реальный фазовый центр антенны совершает сложные колебательные движения, математически определяемые относительно его статического положения вектором смещения, который вследствие этого остается постоянным в антенной базовой системе координат Oxyz. При этом указанные деформирующие воздействия физически проявляются в виде составляющих погрешностей гироинерциальных датчиков 3, 8, 9, 10, 15, что позволяет эффективно решать в ЦВУ 17 задачи их коррекции (компенсации) путем реализации алгоритмов комплексирования.
смещения с началом в центре пересечения осей чувствительности гироинерциальных датчиков 3, 8, 9, 10, 15. Фазовый центр антенны занимает неподвижное положение, когда подвижный носитель находится в статическом состоянии. Во время перемещения подвижного носителя под воздействием упругих, вибрационных и т.п. колебаний корпуса подвижного носителя реальный фазовый центр антенны совершает сложные колебательные движения, математически определяемые относительно его статического положения вектором смещения, который вследствие этого остается постоянным в антенной базовой системе координат Oxyz. При этом указанные деформирующие воздействия физически проявляются в виде составляющих погрешностей гироинерциальных датчиков 3, 8, 9, 10, 15, что позволяет эффективно решать в ЦВУ 17 задачи их коррекции (компенсации) путем реализации алгоритмов комплексирования.
В ЦВУ 17 реализован алгоритм определения параметров движения апертуры антенны относительно облучаемого ОВ в режиме поиска. Эти параметры одновременно являются параметрами траекторного сигнала. Реализация этого алгоритма достигается интегрированием замкнутой системы дифференциальных уравнений в антенной базовой системе координат Ox0y0z0, фиксированной в течение всего интервала времени поиска ОВ (или заданного интервала времени измерения) при начальных условиях, задаваемых и вводимых в алгоритм в момент времени t0 начала режима поиска ОВ (или начала заданного интервала времени измерения), включения приемопередатчика 14 в режим излучения зондирующих сигналов и приема отраженных от облучаемого ОВ сигналов, при этом определяются необходимые для нахождения фазы опорной функции значения радиальной скорости  и радиального ускорения
и радиального ускорения  Затем формируется фаза опорной функции и, наконец, вычисляется фазовая поправка, компенсирующая флюктуации на выходе приемного канала приемопередатчика 14, вызванные траекторными нестабильностями фазового центра антенны предлагаемой бортовой системы самонаведения.
Затем формируется фаза опорной функции и, наконец, вычисляется фазовая поправка, компенсирующая флюктуации на выходе приемного канала приемопередатчика 14, вызванные траекторными нестабильностями фазового центра антенны предлагаемой бортовой системы самонаведения.
Реализованный в ЦВУ 17 алгоритм позволяет определять параметры вектора визирования в смещенной системе координат Oxсмyсмzсм, т.е. при размещении гироинерциальных датчиков 3, 8, 9, 10, 15 на некотором расстоянии от центра излучения.
Кроме того, использование инерциального измерения параметров вектора визирования позволяет реализовать инвариантные к параметрам перемещения подвижного носителя предлагаемой бортовой системы самонаведения алгоритмы взаимодействия информации инерциального измерения параметров вектора визирования с информацией о наклонной скорости сближения подвижного носителя с ОВ дальномерного канала системы радиолокационного автосопровождения ОВ по дальности, реализуемые в ЦВУ 17, обеспечивающие, с одной стороны, получение точных оценок отклонений фазового центра антенны (или/и центра излучения зондирующих сигналов) в направлении вектора визирования по дальности и по азимуту на интервале времени поиска ОВ (или/и на заданном интервале измерения), а с другой стороны, обеспечивающие формирование в процессе поиска оптимальных оценок параметров, характеризующих рассеяние нескольких объектов визирования на земной поверхности в зоне сектора поиска, с их точной координатной привязкой в опорной геоцентрической системе координат Сξ0η0ζ0 (фиг.1). Тем самым решается проблема устранения искажений, возникающих в процессе поиска при выборе ОВ, подлежащего поражению, а также при определении наиболее уязвимых радиолокационно-контрастных частей поверхности корпуса, выбранного для поражения протяженного ОВ.
При этом в ЦВУ 17 реализованы алгоритмы работы систем автосопровождения ОВ по дальности и по направлению, которое совместно с устройством 11 и параболическим зеркалом 1 осуществляет автосопровождение ОВ на конечном участке траектории перемещения подвижного носителя.
Кроме того, в режиме «Поиск ОВ» в ЦВУ 17 из устройства 11 поступают сигналы  и
и  сигналы с выхода датчика 4 угла наклона
сигналы с выхода датчика 4 угла наклона  и с выхода датчика 6 азимута
и с выхода датчика 6 азимута  а также с выхода датчиков линейного ускорения 8, 9, 10 соответственно сигналы
а также с выхода датчиков линейного ускорения 8, 9, 10 соответственно сигналы 

 и с выходов гироскопического ДУС 15 и гироскопа 3 соответственно сигналы
и с выходов гироскопического ДУС 15 и гироскопа 3 соответственно сигналы 

 Осуществляется вывод с выходов ЦВУ 17 в устройство 11 сигналов наведения
Осуществляется вывод с выходов ЦВУ 17 в устройство 11 сигналов наведения  и
и  а также по информационной линии связи 24 вывод информационного массива команд и сигналов управления антенно-волноводным и приемопередающим модулем предлагаемой системы.
а также по информационной линии связи 24 вывод информационного массива команд и сигналов управления антенно-волноводным и приемопередающим модулем предлагаемой системы.
По команде «Поиск ОВ» в ЦВУ 17 решается также задача определения абсолютной высоты Набс полета подвижного носителя по результату инерциального измерения параметров вектора визирования цели согласно алгоритму Набс= Lц·sinεв, где Lц - наклонная дальность сближения подвижного носителя с целью, определяемая инерциальным измерением параметров вектора визирования цели; εВ=const - заданное постоянное значение отклонения вектора (линии) визирования цели в вертикальной плоскости, и скорость ее изменения  по алгоритму
по алгоритму  где
где  - наклонная скорость сближения подвижного носителя с целью, которые используются для формирования в ЦВУ 17 сигнала стабилизации положения подвижного носителя по высоте в течение времени действия режима поиска ОВ до момента захвата его на автосопровождение. Сигнал стабилизации по высоте пропорционален задаваемой вертикальной нагрузке
- наклонная скорость сближения подвижного носителя с целью, которые используются для формирования в ЦВУ 17 сигнала стабилизации положения подвижного носителя по высоте в течение времени действия режима поиска ОВ до момента захвата его на автосопровождение. Сигнал стабилизации по высоте пропорционален задаваемой вертикальной нагрузке  являющейся функцией параметров Набс и
являющейся функцией параметров Набс и  Одновременно с этим на каждом интервале дискретизации в ЦВУ 17 формируются сигналы стабилизации подвижного носителя от колебаний его относительно своего центра масс в горизонтальной плоскости δг, в вертикальной плоскости δв и по крену δк, при этом формируется перегрузка в горизонтальной плоскости
Одновременно с этим на каждом интервале дискретизации в ЦВУ 17 формируются сигналы стабилизации подвижного носителя от колебаний его относительно своего центра масс в горизонтальной плоскости δг, в вертикальной плоскости δв и по крену δк, при этом формируется перегрузка в горизонтальной плоскости 
Сформированные в ЦВУ 17 сигналы, пропорциональные параметрам стабилизации δг, δв, δк и параметрам самонаведения  и
и  по информационной линии связи 25 выдаются во внешнюю по отношению к предлагаемой системе самонаведения аппаратуру управления рулевым приводом подвижного носителя.
по информационной линии связи 25 выдаются во внешнюю по отношению к предлагаемой системе самонаведения аппаратуру управления рулевым приводом подвижного носителя.
Если в процессе поиска ОВ при реализации в ЦВУ 17 алгоритмов обнаружения и выбора ОВ выполняются необходимые критерии, заложенные в соответствующие алгоритмические процедуры, то согласно принятой логике обработки видеосигнала, поступающего по высокочастотной линии связи из приемопередатчика 14 на вход ЦВУ 17, предлагаемая система переходит в режим активного радиолокационного самонаведения подвижного носителя на ОВ по команде «Автосопровождение» (АС), формируемой в ЦВУ 17 и выдаваемой в устройство 11 и по информационной линии связи 25 в аппаратуру управления рулевым приводом подвижного носителя. При этом системы автосопровождения по дальности и по направлению замыкаются через радиоканал (т.е. через эфир). При автосопровождении ОВ на вход соответствующих усилителей мощности устройства 11 из ЦВУ 17 поступают сигналы, пропорциональные величинам рассогласования (ошибки)  и
и  между направлением оптической оси параболического зеркала 1 и направлением на ОВ, которые с выходов усилителей мощности в виде электрических токов Iв и Iг, пропорциональных соответственно составляющим
между направлением оптической оси параболического зеркала 1 и направлением на ОВ, которые с выходов усилителей мощности в виде электрических токов Iв и Iг, пропорциональных соответственно составляющим  и
и  вектора угловой скорости
вектора угловой скорости  поворота параболического зеркала 1 соответственно в горизонтальной и в вертикальной плоскости, подаются на обмотки соответствующих датчиков момента гироскопа 3. С соответствующих датчиков угла прецессии гироскопа 3 затем на входы устройства 11 в широкополосные контуры гиростабилизации поступают сигналы гиростабилизации, пропорциональные угловым рассогласованиям
поворота параболического зеркала 1 соответственно в горизонтальной и в вертикальной плоскости, подаются на обмотки соответствующих датчиков момента гироскопа 3. С соответствующих датчиков угла прецессии гироскопа 3 затем на входы устройства 11 в широкополосные контуры гиростабилизации поступают сигналы гиростабилизации, пропорциональные угловым рассогласованиям  и
и  между положением наружной и внутренней рамок двухосного карданова подвеса параболического зеркала 1 и направлением вектора кинетического момента гироскопа 3. При отработке этих рассогласований устройство 11 обеспечивает гиростабилизацию направления оптической оси параболического зеркала 1 и тем самым направления линии (вектора) визирования на сопровождаемый ОВ.
между положением наружной и внутренней рамок двухосного карданова подвеса параболического зеркала 1 и направлением вектора кинетического момента гироскопа 3. При отработке этих рассогласований устройство 11 обеспечивает гиростабилизацию направления оптической оси параболического зеркала 1 и тем самым направления линии (вектора) визирования на сопровождаемый ОВ.
В режиме автосопровождения ОВ в ЦВУ 17 реализуются алгоритмы комплексирования информации инерциального измерения параметров вектора визирования цели и информации радиолокационных каналов автосопровождения ОВ по дальности и по направлению.
Задача комплексирования в ЦВУ 17 решается согласно следующей алгоритмической последовательности:
- сравнение сигналов, пропорциональных текущим значениям параметров вектора визирования цели в антенной системе координат Oxyz, определяемых инерциальным измерением, с идентичными сигналами, пропорциональными текущим значениям параметров вектора (линии) визирования ОВ в антенной базовой системе координат Oxyz при его автосопровождении, которые являются выходными сигналами углового и временного дискриминаторов соответственно устройств автосопровождения ОВ по направлению и по дальности;
- оптимальная адаптивная фильтрация, обеспечивающая помехоустойчивое оценивание полезного сигнала в каждом устройстве автосопровождения (по азимуту, по углу наклона и по дальности), оптимальную помехоустойчивую самонастройку параметров вектора визирования и нахождение точной оценки сигналов рассогласования;
- компенсация (коррекция) соответствующей информации инерциального измерения параметров вектора визирования цели с помощью полученных точных оценок рассогласования;
- формирование скорректированной информации управляющих сигналов в каждой системе автосопровождения ОВ и их отработкой устройством 11, благодаря чему производится совмещение линии визирования с ОВ по направлению и по дальности.
При этом на выходе ЦВУ 17 формируется информационный массив стабилизации и управления подвижного носителя, который по информационной линии связи 25 передается на вход аппаратуры управления рулевого привода носителя. Благодаря этому реализуются заложенные в предлагаемой бортовой системе законы самонаведения при локационном контакте с ОВ.
При срыве автосопровождения ОВ, т.е. при отсутствии локационного контакта с ОВ, предлагаемая система переходит в режим памяти, самонаведение на запомненные координаты ОВ осуществляется по скорректированной информации инерциального измерения параметров вектора визирования, т.е. на цель, координаты которой соответствуют координатам ОВ в момент срыва его автосопровождения.
При повторном поиске ОВ и захвате его на автосопровождение описанный выше процесс повторяется и подвижный носитель предлагаемой системы продолжает перемещаться в направлении на ОВ.
Радионавигационный приемоизмеритель 16 обеспечивает прием и обработку внешней информации от спутниковой системы навигации и формирует информационный массив коррекции инерциального измерения параметров вектора визирования, который по информационной линии связи 22 подается на вход ЦВУ 17 (фиг.6).
Благодаря использованию этой корректирующей информации в ЦВУ 17 достигается существенное повышение точности определения параметров вектора визирования ОВ, в частности абсолютной высоты подвижного носителя в режиме поиска ОВ и, соответственно, точности самонаведения подвижного носителя на ОВ.
Высокочастотные устройства 18, 19, 20, 21 и двухдиапазонный приемопередатчик 14 реализуют встроенный более коротковолновый по сравнению с основным диапазон рабочих волн излучения.
Выбор конкретной рабочей частоты встроенного более коротковолнового диапазона определяется необходимостью обеспечения основных характеристик радиолокационного канала предлагаемой бортовой системы самонаведения для решения тактической задачи самонаведения подвижного носителя на конечном участке траектории в условиях противодействия, а также с учетом условий эксплуатации и необходимых экономических показателей.
Работа предлагаемой бортовой системы в более коротковолновом диапазоне волн не отличается от ее работы в основном диапазоне.
При переходе на более коротковолновый диапазон рабочих волн излучения для обеспечения основных характеристик бортовой системы самонаведения, содержащей облучатель основного диапазона волн излучения, сохраняется ее диапазон рабочих волн излучения как основной. При этом путем встраивания более коротковолнового диапазона рабочих волн излучения в предлагаемой бортовой системе самонаведения выполняются следующие основные требования, предъявляемые к выбору второго (более коротковолнового) диапазона волн:
- существенное повышение угловой разрешающей способности;
- повышенная помехозащищенность работы системы;
- обеспечение кратности полуволн диапазонов для возможности работы под одним общим обтекателем, причем увеличение поглощения на трассе движения носителя системы в условиях наличия гидрометеоров не должно уменьшать дальность действия системы более чем на 40÷70% при номинальной расчетной дальности, например 15÷20 км.
Сочетание основного и более коротковолнового диапазонов рабочих волн излучения в предлагаемой бортовой системе обеспечивает конструктивное встраивание более коротковолнового диапазона рабочих волн излучения в устройство основного диапазона с использованием:
- общей максимально возможной апертуры антенны (общего параболического зеркала 1);
- общих для обоих диапазонов рабочих волн устройств управления и стабилизации линии (вектора) визирования;
- общей схемы обработки отраженных от облучаемых ОВ сигналов;
- идентичной юстировки;
- общего обтекателя;
- общей оптической схемы параболического зеркала 1. При этом волноводные схемы высокочастотного тракта обоих диапазонов выполнены по схеме скрытого сканирования.
Таким образом, предлагаемое техническое решение обеспечивает достижение положительного эффекта, заключающегося в следующем.
Благодаря информации управляемого трехстепенного гироскопа 3, являющегося чувствительным и исполнительным элементов следящего гиропривода и чувствительным элементом инерциального измерения параметров вектора визирования, а также информации двухканального гироскопического датчика угловой скорости 15 и трех однокомпонентных измерителей линейного ускорения 8, 9, 10 в составе внутренней рамки двухосного карданова подвеса параболического зеркала 1 реализуется в ЦВУ 17 алгоритм работы инерциального измерения параметров вектора визирования в антенной базовой системе координат Oxyz. Сигналы, пропорциональные составляющим пространственной угловой координаты, определяемым инерциальным измерением параметров вектора визирования цели, которые отсчитываются относительно оптической оси параболического зеркала 1 и определяют рассогласование между направлением вектора (линии) визирования и направлением на цель, аналогичны соответствующим рассогласованиям между направлением линии (вектора) визирования и направлением на ОВ, определяемым угловым дискриминатором системы автосопровождения ОВ по направлению. В этом смысле они являются идентичными.
Поэтому в предлагаемой системе практически решена задача комплексирования радиолокационных каналов автосопровождения ОВ по направлению и по дальности и инерциального измерения параметров вектора визирования цели путем введения автономной информации внутрь соответствующих контуров автосопровождения ОВ с применением в качестве фильтра нижних частот оптимального адаптивного фильтра, что позволяет существенно повысить динамическую точность (приблизительно в 10 раз) бортовой системы самонаведения и ее помехоустойчивость за счет сужения полосы пропускания контуров автосопровождения ОВ, а также выполнить условие инвариантности динамической ошибки предлагаемой системы к траекторным изменениям входных сигналов.
На основе алгоритма работы инерциального измерения параметров вектора визирования цели или/и ОВ в предлагаемой бортовой системе самонаведения в ЦВУ 17 практически реализован в режиме поиска ОВ алгоритм определения параметров траекторных флюктуаций и воздействий (деформирующих, вибрационных и т.п.) корпуса подвижного носителя на пространственное положение фазового центра антенны (или/и центров излучения облучателей 2 и 19) относительно опорной траектории перемещения подвижного носителя предлагаемой бортовой системы самонаведения и относительно цели или/и ОВ, позволяющий измерять параметры вектора визирования в смещенной системе координат, т.е. при размещении гироинерциальных датчиков 3, 8, 9, 10, 15 на некотором расстоянии (менее 0,3 м) от фазового центра антенны (или/и центр излучения зондирующих сигналов). Совместная обработка информации инерциального измерения параметров вектора визирования цели и информации контуров автосопровождения ОВ по направлению и по дальности позволяет реализовать в ЦВУ 17 алгоритмы, инвариантные к параметрам перемещения подвижного носителя, обеспечивающие получение точных оценок отклонений фазового центра антенны в направлении вектора визирования по дальности и по азимуту. Благодаря этому в предлагаемой бортовой системе решается задача повышения линейного разрешения по азимуту и по дальности облучаемого ОВ.
За счет реализации в предлагаемой бортовой системе самонаведения двухдиапазонности рабочих волн излучения угловая разрешающая способность системы повышается в 4 раза при использовании во встроенном коротковолновом диапазоне такой же апертуры, как и в основном диапазоне рабочих волн излучения. При использовании коротковолнового диапазона волн излучения заметно возрастает эффективная поверхность рассеяния (ЭПР) объектов визирования (приблизительно в 5÷15 раз) и коэффициент усиления (КУ) антенны (в 4 раза). Это увеличение ЭПР и КУ компенсирует основной недостаток коротковолнового диапазона рабочих волн излучения, а именно снижение дальности действия в сложных метеоусловиях, поскольку затухание на трассе перемещения подвижного носителя, особенно при наличии гидрометеоров, увеличивается по мере уменьшения длины волны. При этом в условиях сближения подвижного носителя с ОВ дальность сближения естественным образом уменьшается, что уменьшает негативное влияние недостатка коротковолнового диапазона рабочих волн излучения на дальность действия системы, даже при увеличении интенсивности, например, дождя до 4 мм/час или до 6 мм/час.
Повышенная угловая разрешающая способность предлагаемой системы, сопоставимая с величиной обнаруживаемого ОВ, обеспечивается решением задачи самонаведения подвижного носителя на объекты визирования (подвижные или неподвижные) с малой ЭПР.
Кроме того, при переходе с одного диапазона рабочих волн излучения на другой также повышается помехозащищенность предлагаемой системы в условиях радиоэлектронного противодействия.
За счет равенства расстояний между каждым из шарниров, размещенных на параболическом зеркале 1, и его центром вращения расстоянию между каждым из шарниров, установленных соответственно на наружной и внутренней рамках двухосного карданова подвеса параболического зеркала 1, и центром их вращения расширяется диапазон углов наклона траектории на автономном баллистическом участке траектории перемещения подвижного носителя предлагаемой бортовой системы самонаведения.
Аппаратная реализация предлагаемой бортовой системы самонаведения подвижного носителя на базе инерциального измерения параметров вектора визирования цели или/и ОВ в антенной базовой системе координат Oxyz, как показывают разработка системы и практическая отработка ее, исключает необходимость использования в составе подвижного носителя не только дорогостоящей классической инерциальной системы навигации, но и радиовысотомера. Благодаря этому освобождается существенный объем (отсек) подвижного носителя либо для увеличения полезной нагрузки, либо для увеличения массы топлива для двигательной установки подвижного носителя.
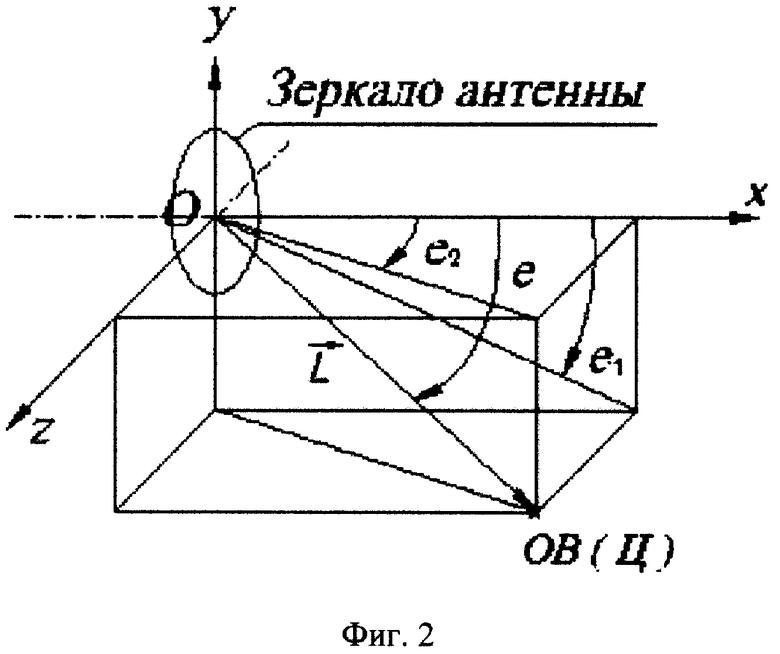
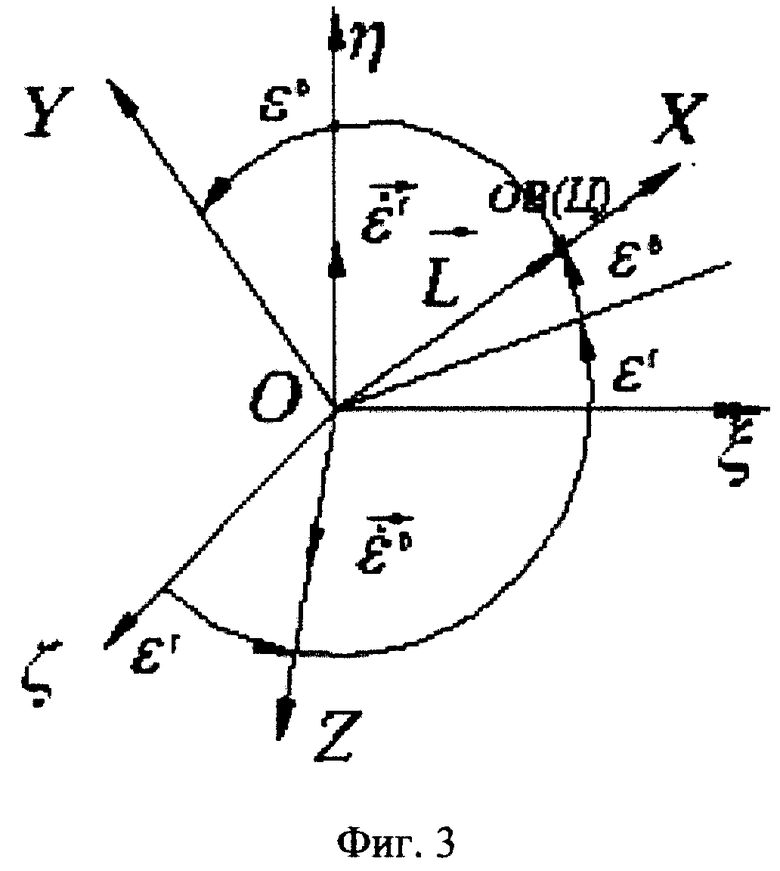
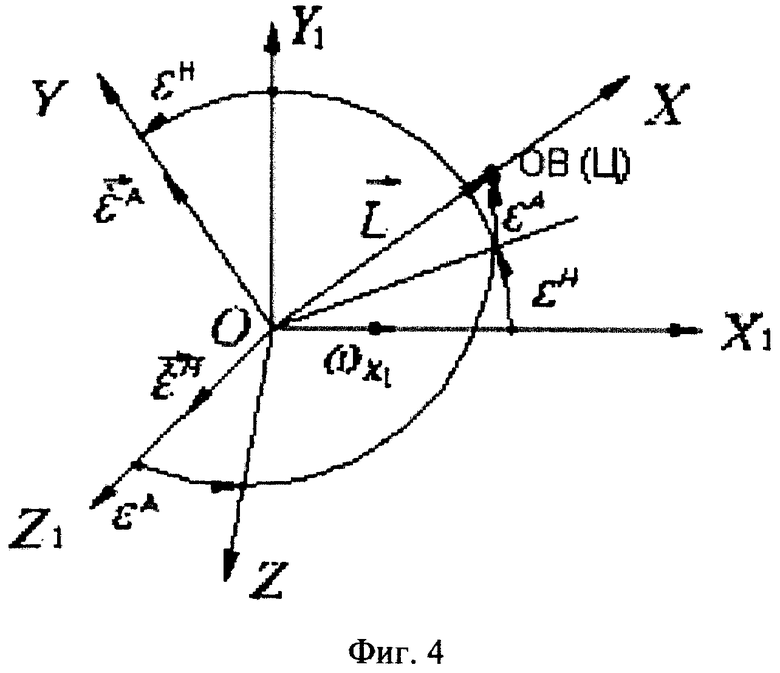
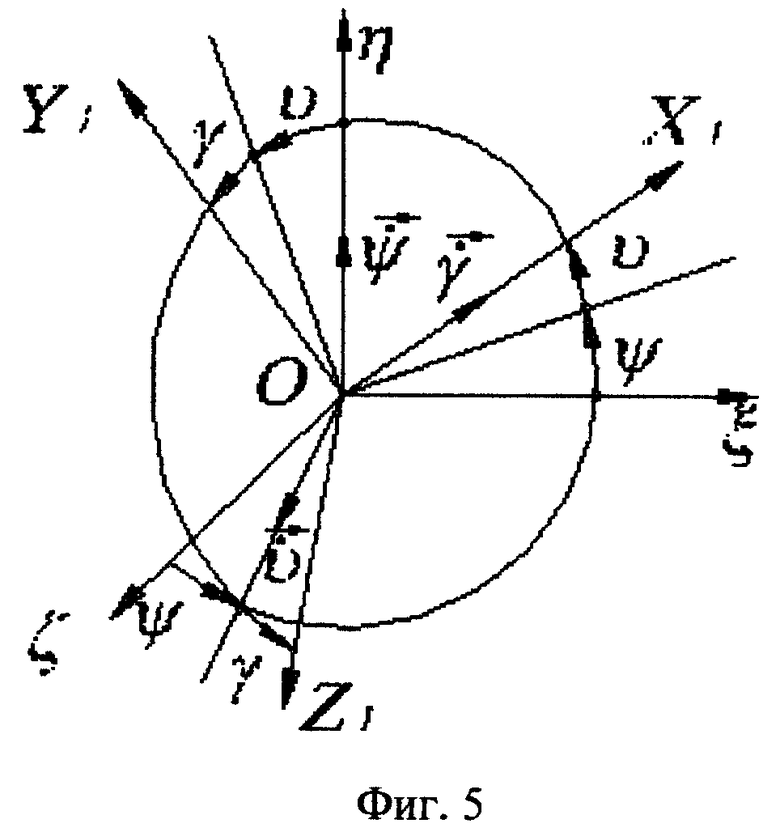
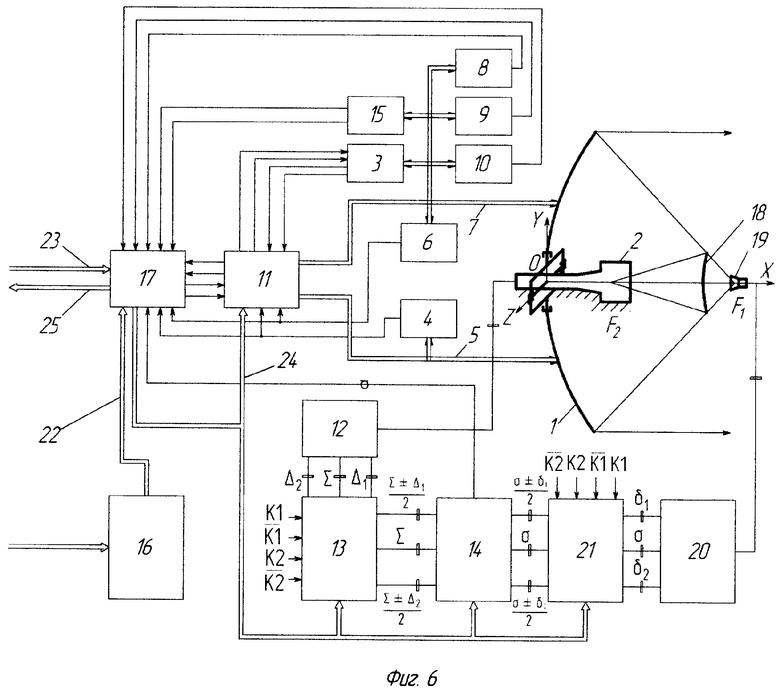
Изобретение относится к области систем самонаведения подвижных носителей. Технический результат - повышение точности, линейной и угловой разрешающей способности, помехозащищенности самонаведения при одновременном повышении помехоустойчивости и динамической точности автосопровождения объекта визирования по направлению и дальности. Сущность изобретения заключается в том, что формируют сигналы, пропорциональные проекциям вектора кажущегося линейного ускорения и проекциям вектора абсолютной скорости поворота вектора (линии) визирования цели на соответствующие координатные оси базовой антенной системы координат. По полученным сигналам с учетом начальной информации назначения цели или/и объекта визирования (ОВ) и начальных условий выставки инерциального измерения параметров вектора визирования определяют сигналы, пропорциональные текущим значениям вектора визирования цели, т.е. проекций вектора абсолютной линейной скорости сближения подвижного носителя с целью на соответствующие координатные оси базовой антенной системы координат, наклонной дальности сближения подвижного носителя с целью, составляющих пространственной угловой координаты цели в базовой антенной системе координат, направляющих косинусов взаимного углового положения базовой антенной системы координат и опорной геоцентрической системы координат, связанной одной своей координатной осью с неподвижной целью или/и с ОВ, расположенной, например, на земной поверхности. При отсутствии локационного контакта с целью или/и с ОВ преобразуют полученные сигналы в сигналы стабилизации подвижного носителя от его колебаний относительно своего центра масс в горизонтальной плоскости, в вертикальной плоскости и по крену, а также в сигналы самонаведения подвижного носителя на цель, пропорциональные перегрузкам. При поиске ОВ и его автосопровождении формируют сигналы по основному или по встроенному коротковолновому каналу излучения волн, которые пропорциональны составляющим пространственной угловой координаты ОВ и наклонной дальности до ОВ в антенной системе координат. При этом определяют сигналы, пропорциональные параметрам траекторных флюктуаций и деформирующих воздействий корпуса подвижного носителя на пространственное положение фазового центра антенны относительно цели или/и ОВ. По этим сигналам формируют сигнал, пропорциональный фазе опорной функции, являющейся функцией модуля вектора визирования цели или/и ОВ в смещенной системе координат, т.е. наклонной дальности до цели или/и ОВ, а также скорости ее изменения и ускорения за время интервала разрешения цели или/и ОВ. Положение смещенной системы координат при этом определяется вектором смещения фазового центра антенны или/и центра излучения зондирующих сигналов антенны относительно центра пересечения осей чувствительности измерения проекций кажущегося линейного ускорения и проекций вектора абсолютной угловой скорости поворота вектора (линии) визирования цели или/и ОВ в процессе инерциального измерения параметров вектора визирования цели или/и ОВ. По полученному сигналу, пропорциональному фазе опорной функции, определяют сигнал, пропорциональный фазовой поправке, компенсирующей в принимаемых сигналах, отраженных от облучаемого ОВ, траекторную нестабильность фазового центра антенны и деформирующих воздействий корпуса подвижного носителя. При автосопровождении ОВ по направлению и по дальности сравнивают сформированные сигналы, пропорциональные текущим параметрам вектора визирования цели в базовой антенной системе координат, соответственно с идентичными сигналами автосопровождения ОВ по направлению и по дальности в этой системе координат. Затем осуществляют оптимальную адаптивную помехоустойчивую фильтрацию соответствующих сигналов сравнения и формируют сигналы, пропорциональные точным оценкам соответствующих сигналов сравнения. Сигналами, пропорциональными точным оценкам, корректируют сигналы, пропорциональные соответственно текущим значениям параметров вектора визирования цели. По этим сигналам производят поворот вектора визирования по углу наклона и по азимуту относительно корпуса подвижного носителя до совмещения ее с направлением на ОВ, а при автосопровождении ОВ формируют сигналы, пропорциональные наклонной дальности и скорости сближения подвижного носителя с ОВ. Кроме того, формируют одновременно сигналы, пропорциональные скорости изменения соответственно углов визирования ОВ в горизонтальной и вертикальной плоскости в горизонтальной системе координат. По полученным данным формируют сигналы стабилизации подвижного носителя от колебаний его относительно центра масс в горизонтальной плоскости, в вертикальной плоскости и по крену, а также сигналы самонаведения подвижного носителя, пропорциональные перегрузкам соответственно в горизонтальной и в вертикальной плоскости. 2 н.п. ф-лы, 6 ил.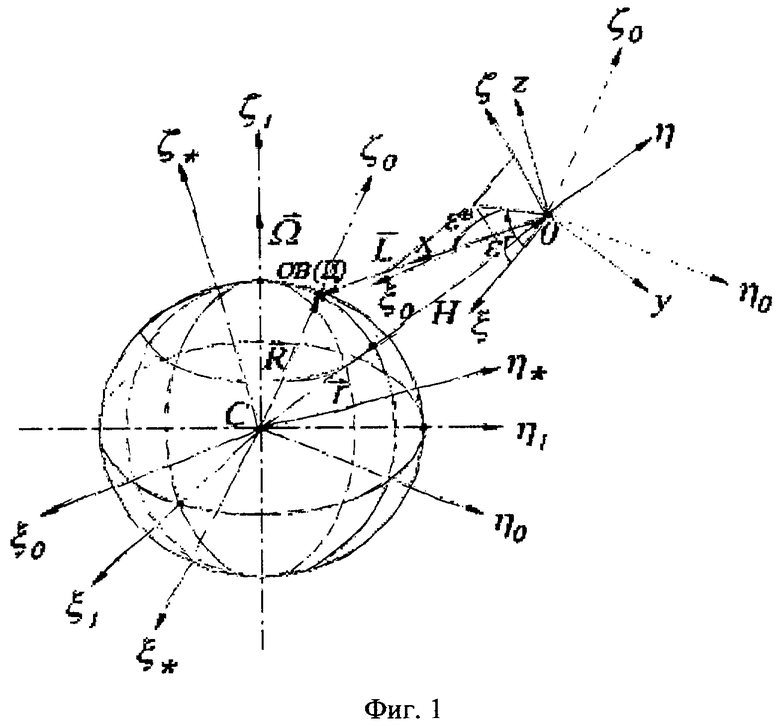
 , которые детектируют и затем формируют сигналы, пропорциональные соответственно сигналам рассогласования автосопровождения по углу наклона и по азимуту, которые являются составляющими пространственной угловой координаты облучаемого ОВ в антенной системе координат, а также вырабатывают управляющие сигналы, пропорциональные соответственно составляющим вектора угловой скорости поворота линии визирования в направлении ОВ соответственно в вертикальной и в горизонтальной плоскости в горизонтальной системе координат, которые интегрируют, и совмещают линию визирования с ОВ, при этом регистрируют сигналы, пропорциональные отклонениям линии визирования ОВ по углу наклона и по азимуту относительно корпуса подвижного носителя, осуществляют автосопровождение ОВ по направлению, при этом по полученным сигналам формируют сигналы для стабилизации подвижного носителя от колебаний его относительно центра масс и для самонаведения подвижного носителя на ОВ, при этом при предстартовой подготовке подвижного носителя, кроме задания начальных координат цели или/и начального назначения ОВ, формируют начальные условия выставки инерциального измерения параметров вектора визирования цели в виде сигналов, характеризующих пакет последовательных информационных слов, содержащий начальные значения проекций вектора линейной скорости предстартового перемещения подвижного носителя на соответствующие координатные оси горизонтальной системы координат с началом в центре масс подвижного носителя, декартовых координат цели, географической долготы и географической широты подвижного носителя при его старте, преобразуют заданные начальные условия выставки инерциального измерения параметров вектора визирования цели в сигналы, пропорциональные проекциям вектора линейной скорости предстартового перемещения подвижного носителя на соответствующие координатные оси базовой антенной системы координат, в сигналы, пропорциональные углам визирования цели соответственно в горизонтальной плоскости и в вертикальной плоскости в горизонтальной системе координат, в сигналы, пропорциональные составляющим пространственной угловой координаты цели в базовой антенной системе координат, в сигналы, пропорциональные направляющим косинусам, определяющим начальное взаимное положение базовой антенной системы координат и опорной геоцентрической системы координат, связанной одной своей координатной осью с неподвижной целью или/и с ОВ, расположенной на земной поверхности, в момент времени старта подвижного носителя измеряют сигналы, пропорциональные проекциям вектора кажущегося линейного ускорения движения и проекциям вектора абсолютной угловой скорости поворота зеркала антенны на соответствующие координатные оси базовой антенной системы координат, связанной с зеркалом антенны, по этим измеренным сигналам с учетом переменной электрической редукции между углом поворота зеркала антенны и углом поворота линии визирования определяют сигналы, пропорциональные проекциям вектора кажущегося линейного ускорения движения и проекциям вектора абсолютной угловой скорости поворота вектора визирования цели на соответствующие координатные оси базовой антенной системы координат, формируют по полученным сигналам с учетом сигналов, характеризующих начальные координаты цели и начальные условия выставки инерциального измерения параметров вектора визирования, сигналы, пропорциональные текущим значениям параметров вектора визирования цели, а именно проекций вектора абсолютной линейной скорости сближения подвижного носителя с целью на соответствующие координатные оси базовой антенной системы координат, наклонной дальности и наклонной скорости сближения подвижного носителя с целью, составляющих пространственной угловой координаты цели в базовой антенной системе координат, направляющих косинусов взаимного углового положения базовой антенной системы координат и опорной геоцентрической системы координат, при отсутствии локационного контакта с ОВ преобразуют полученные сигналы, пропорциональные соответствующим текущим значениям параметров вектора визирования цели, в управляющие сигналы, по которым осуществляют поворот зеркала антенны по углу наклона и по азимуту, которые затем преобразуют с учетом переменной электрической редукции в углы поворота вектора визирования по углу наклона и по азимуту относительно корпуса подвижного носителя до совмещения его направления с направлением на цель и до совмещения подвижного строба дальности с целью, формируют при этом сигналы, пропорциональные скорости изменения углов визирования цели в горизонтальной и в вертикальной плоскости в горизонтальной системе координат, а также сигналы, пропорциональные скорости изменения угла наклона и азимута цели в связанной системе координат, преобразуют сигналы, пропорциональные проекциям вектора абсолютной угловой скорости поворота базовой антенной системы координат, в сигналы, пропорциональные его проекциям на соответствующие координатные оси связанной системы координат, по полученным сигналам формируют сигналы, пропорциональные скорости измерения соответственно рыскания, тангажа, крена подвижного носителя, по которым формируют сигналы, пропорциональные соответственно рысканию, тангажу, крену, с учетом их начальных значений, полученных при предстартовой подготовке подвижного носителя, одновременно определяют сигналы, пропорциональные проекциям вектора углового ускорения подвижного носителя на соответствующие координатные оси связанной системы координат, затем по полученным сигналам формируют сигналы стабилизации подвижного носителя от его колебаний относительно своего центра масс в горизонтальной плоскости, в вертикальной плоскости и по крену, а также сигналы самонаведения подвижного носителя на цель, пропорциональные перегрузкам подвижного носителя в вертикальной и в горизонтальной плоскости, преобразуют полученную информацию в управляющие сигналы, которые передают в виде информационного массива стабилизации и управления по информационной линии связи во внешнюю аппаратуру управления рулевым приводом подвижного носителя, при достижении значения наклонной дальности сближения подвижного носителя с целью, равной величине наклонной дальности возможного локационного контакта с ОВ, излучают последовательно зондирующие сигналы сначала основного диапазона волн и затем встроенного более коротковолнового диапазона волн согласно принятой логике поиска ОВ, при этом частота более коротковолнового диапазона волн превышает в четное число раз частоту основного диапазона волн, линейная поляризация встроенного более коротковолнового диапазона волн ортогональна по отношению к линейной поляризации основного диапазона волн, а линии визирования встроенного и основного каналов излучения совмещены между собой и с начальной юстировкой обоих каналов излучения со строительными осями подвижного носителя, причем управление направлением совмещенной линии визирования отрабатывают одним и тем же приводом зеркала антенны основного диапазона волн, осуществляют секторный поиск ОВ по направлению и поиск ОВ по дальности, принимают отраженные от облучаемых ОВ сигналы, находящиеся в пределах сектора поиска ОВ по направлению и в зоне поиска ОВ по дальности, производят по основному или по встроенному более коротковолновому диапазону обнаружение, выбор и захват ОВ, выбранного из всех обнаруженных в секторе поиска ОВ согласно принятым критериям выбора, на автосопровождение по дальности и по направлению, совмещают полученные в результате первичной обработки принимаемые отраженные от облучаемого ОВ высокочастотные сигналы по основному и встроенному диапазону волн, подвергают полученные сигналы вторичной обработке, формируют в результате этого сигналы по основному и встроенному каналу излучения, которые пропорциональны составляющим пространственной угловой координаты ОВ и наклонной дальности до ОВ в антенной системе координат, при этом по сигналам, пропорциональным измеренным значениям проекций вектора кажущегося линейного ускорения и проекций вектора абсолютной угловой скорости поворота вектора визирования цели на соответствующие координатные оси базовой антенной системы координат, фиксированной в момент времени начала поиска ОВ на заданный интервал времени разрешения, с учетом линейного смещения фазового центра антенны относительно центра осей чувствительности измерения проекций вектора кажущегося линейного ускорения и проекций вектора абсолютной угловой скорости поворота вектора визирования цели или/и ОВ определяют сигналы, пропорциональные параметрам траекторных флюктуаций и воздействий корпуса подвижного носителя на пространственное положение фазового центра антенны относительно цели или/и ОВ, измеряют сигналы, пропорциональные параметрам движения апертуры относительно цели или/и ОВ, которые являются параметрами траекторного сигнала, в системе координат, смещенной относительно фиксированной базовой антенной системы координат, по этим сигналам формируют сигнал, пропорциональный фазе опорной функции, являющейся функцией модуля вектора визирования цели или/и ОВ в смещенной системе координат в момент времени начала поиска ОВ, а также скорости его изменения и ускорения за время поиска ОВ, затем по полученному сигналу, пропорциональному фазе опорной функции, определяют сигнал, пропорциональный фазовой поправке, компенсирующей в принимаемых сигналах траекторную нестабильность фазового центра антенны и воздействия корпуса подвижного носителя, перемещающегося по траектории, при автосопровождении ОВ по направлению и по дальности сравнивают сформированные сигналы, пропорциональные текущим значениям параметров вектора визирования цели в базовой антенной системе координат, а именно составляющих пространственной угловой координаты цели и наклонной дальности сближения подвижного носителя с целью, соответственно с идентичными сигналами автосопровождения ОВ по направлению и по дальности, пропорциональными текущим значениям параметров вектора визирования ОВ в базовой антенной системе координат, осуществляют оптимальную адаптивную помехоустойчивую фильтрацию соответствующих сигналов сравнения, формируют сигналы, пропорциональные точным оценкам соответствующих сигналов сравнения, полученным в результате оптимальной адаптивной фильтрации, с помощью которых корректируют сигналы, пропорциональные соответственно текущим значениям параметров вектора визирования цели, после чего по сигналам, полученным в результате коррекции, формируют управляющие сигналы, по которым производят поворот зеркала антенны по углу наклона и по азимуту, которые затем преобразуют с учетом переменной электрической редукции в углы поворота линии визирования по углу наклона и по азимуту относительно корпуса подвижного носителя до совмещения ее с направлением на ОВ, при автосопровождении ОВ по дальности отфильтрованный сигнал рассогласования интегрируют во времени и получают сигналы, пропорциональные наклонной дальности и скорости сближения подвижного носителя с ОВ, одновременно формируют сигналы, пропорциональные скорости изменения соответственно углов визирования ОВ в горизонтальной и в вертикальной плоскости в горизонтальной системе координат, сигналы стабилизации подвижного носителя от колебаний относительно своего центра масс в горизонтальной плоскости, в вертикальной плоскости и по крену, сигналы самонаведения подвижного носителя на ОВ, пропорциональные перегрузкам соответственно в горизонтальной и в вертикальной плоскости, преобразуют эти сигналы в сигналы управления рулевым приводом подвижного носителя для обеспечения стабилизации и самонаведения подвижного носителя на ОВ согласно принятому закону самонаведения.
, которые детектируют и затем формируют сигналы, пропорциональные соответственно сигналам рассогласования автосопровождения по углу наклона и по азимуту, которые являются составляющими пространственной угловой координаты облучаемого ОВ в антенной системе координат, а также вырабатывают управляющие сигналы, пропорциональные соответственно составляющим вектора угловой скорости поворота линии визирования в направлении ОВ соответственно в вертикальной и в горизонтальной плоскости в горизонтальной системе координат, которые интегрируют, и совмещают линию визирования с ОВ, при этом регистрируют сигналы, пропорциональные отклонениям линии визирования ОВ по углу наклона и по азимуту относительно корпуса подвижного носителя, осуществляют автосопровождение ОВ по направлению, при этом по полученным сигналам формируют сигналы для стабилизации подвижного носителя от колебаний его относительно центра масс и для самонаведения подвижного носителя на ОВ, при этом при предстартовой подготовке подвижного носителя, кроме задания начальных координат цели или/и начального назначения ОВ, формируют начальные условия выставки инерциального измерения параметров вектора визирования цели в виде сигналов, характеризующих пакет последовательных информационных слов, содержащий начальные значения проекций вектора линейной скорости предстартового перемещения подвижного носителя на соответствующие координатные оси горизонтальной системы координат с началом в центре масс подвижного носителя, декартовых координат цели, географической долготы и географической широты подвижного носителя при его старте, преобразуют заданные начальные условия выставки инерциального измерения параметров вектора визирования цели в сигналы, пропорциональные проекциям вектора линейной скорости предстартового перемещения подвижного носителя на соответствующие координатные оси базовой антенной системы координат, в сигналы, пропорциональные углам визирования цели соответственно в горизонтальной плоскости и в вертикальной плоскости в горизонтальной системе координат, в сигналы, пропорциональные составляющим пространственной угловой координаты цели в базовой антенной системе координат, в сигналы, пропорциональные направляющим косинусам, определяющим начальное взаимное положение базовой антенной системы координат и опорной геоцентрической системы координат, связанной одной своей координатной осью с неподвижной целью или/и с ОВ, расположенной на земной поверхности, в момент времени старта подвижного носителя измеряют сигналы, пропорциональные проекциям вектора кажущегося линейного ускорения движения и проекциям вектора абсолютной угловой скорости поворота зеркала антенны на соответствующие координатные оси базовой антенной системы координат, связанной с зеркалом антенны, по этим измеренным сигналам с учетом переменной электрической редукции между углом поворота зеркала антенны и углом поворота линии визирования определяют сигналы, пропорциональные проекциям вектора кажущегося линейного ускорения движения и проекциям вектора абсолютной угловой скорости поворота вектора визирования цели на соответствующие координатные оси базовой антенной системы координат, формируют по полученным сигналам с учетом сигналов, характеризующих начальные координаты цели и начальные условия выставки инерциального измерения параметров вектора визирования, сигналы, пропорциональные текущим значениям параметров вектора визирования цели, а именно проекций вектора абсолютной линейной скорости сближения подвижного носителя с целью на соответствующие координатные оси базовой антенной системы координат, наклонной дальности и наклонной скорости сближения подвижного носителя с целью, составляющих пространственной угловой координаты цели в базовой антенной системе координат, направляющих косинусов взаимного углового положения базовой антенной системы координат и опорной геоцентрической системы координат, при отсутствии локационного контакта с ОВ преобразуют полученные сигналы, пропорциональные соответствующим текущим значениям параметров вектора визирования цели, в управляющие сигналы, по которым осуществляют поворот зеркала антенны по углу наклона и по азимуту, которые затем преобразуют с учетом переменной электрической редукции в углы поворота вектора визирования по углу наклона и по азимуту относительно корпуса подвижного носителя до совмещения его направления с направлением на цель и до совмещения подвижного строба дальности с целью, формируют при этом сигналы, пропорциональные скорости изменения углов визирования цели в горизонтальной и в вертикальной плоскости в горизонтальной системе координат, а также сигналы, пропорциональные скорости изменения угла наклона и азимута цели в связанной системе координат, преобразуют сигналы, пропорциональные проекциям вектора абсолютной угловой скорости поворота базовой антенной системы координат, в сигналы, пропорциональные его проекциям на соответствующие координатные оси связанной системы координат, по полученным сигналам формируют сигналы, пропорциональные скорости измерения соответственно рыскания, тангажа, крена подвижного носителя, по которым формируют сигналы, пропорциональные соответственно рысканию, тангажу, крену, с учетом их начальных значений, полученных при предстартовой подготовке подвижного носителя, одновременно определяют сигналы, пропорциональные проекциям вектора углового ускорения подвижного носителя на соответствующие координатные оси связанной системы координат, затем по полученным сигналам формируют сигналы стабилизации подвижного носителя от его колебаний относительно своего центра масс в горизонтальной плоскости, в вертикальной плоскости и по крену, а также сигналы самонаведения подвижного носителя на цель, пропорциональные перегрузкам подвижного носителя в вертикальной и в горизонтальной плоскости, преобразуют полученную информацию в управляющие сигналы, которые передают в виде информационного массива стабилизации и управления по информационной линии связи во внешнюю аппаратуру управления рулевым приводом подвижного носителя, при достижении значения наклонной дальности сближения подвижного носителя с целью, равной величине наклонной дальности возможного локационного контакта с ОВ, излучают последовательно зондирующие сигналы сначала основного диапазона волн и затем встроенного более коротковолнового диапазона волн согласно принятой логике поиска ОВ, при этом частота более коротковолнового диапазона волн превышает в четное число раз частоту основного диапазона волн, линейная поляризация встроенного более коротковолнового диапазона волн ортогональна по отношению к линейной поляризации основного диапазона волн, а линии визирования встроенного и основного каналов излучения совмещены между собой и с начальной юстировкой обоих каналов излучения со строительными осями подвижного носителя, причем управление направлением совмещенной линии визирования отрабатывают одним и тем же приводом зеркала антенны основного диапазона волн, осуществляют секторный поиск ОВ по направлению и поиск ОВ по дальности, принимают отраженные от облучаемых ОВ сигналы, находящиеся в пределах сектора поиска ОВ по направлению и в зоне поиска ОВ по дальности, производят по основному или по встроенному более коротковолновому диапазону обнаружение, выбор и захват ОВ, выбранного из всех обнаруженных в секторе поиска ОВ согласно принятым критериям выбора, на автосопровождение по дальности и по направлению, совмещают полученные в результате первичной обработки принимаемые отраженные от облучаемого ОВ высокочастотные сигналы по основному и встроенному диапазону волн, подвергают полученные сигналы вторичной обработке, формируют в результате этого сигналы по основному и встроенному каналу излучения, которые пропорциональны составляющим пространственной угловой координаты ОВ и наклонной дальности до ОВ в антенной системе координат, при этом по сигналам, пропорциональным измеренным значениям проекций вектора кажущегося линейного ускорения и проекций вектора абсолютной угловой скорости поворота вектора визирования цели на соответствующие координатные оси базовой антенной системы координат, фиксированной в момент времени начала поиска ОВ на заданный интервал времени разрешения, с учетом линейного смещения фазового центра антенны относительно центра осей чувствительности измерения проекций вектора кажущегося линейного ускорения и проекций вектора абсолютной угловой скорости поворота вектора визирования цели или/и ОВ определяют сигналы, пропорциональные параметрам траекторных флюктуаций и воздействий корпуса подвижного носителя на пространственное положение фазового центра антенны относительно цели или/и ОВ, измеряют сигналы, пропорциональные параметрам движения апертуры относительно цели или/и ОВ, которые являются параметрами траекторного сигнала, в системе координат, смещенной относительно фиксированной базовой антенной системы координат, по этим сигналам формируют сигнал, пропорциональный фазе опорной функции, являющейся функцией модуля вектора визирования цели или/и ОВ в смещенной системе координат в момент времени начала поиска ОВ, а также скорости его изменения и ускорения за время поиска ОВ, затем по полученному сигналу, пропорциональному фазе опорной функции, определяют сигнал, пропорциональный фазовой поправке, компенсирующей в принимаемых сигналах траекторную нестабильность фазового центра антенны и воздействия корпуса подвижного носителя, перемещающегося по траектории, при автосопровождении ОВ по направлению и по дальности сравнивают сформированные сигналы, пропорциональные текущим значениям параметров вектора визирования цели в базовой антенной системе координат, а именно составляющих пространственной угловой координаты цели и наклонной дальности сближения подвижного носителя с целью, соответственно с идентичными сигналами автосопровождения ОВ по направлению и по дальности, пропорциональными текущим значениям параметров вектора визирования ОВ в базовой антенной системе координат, осуществляют оптимальную адаптивную помехоустойчивую фильтрацию соответствующих сигналов сравнения, формируют сигналы, пропорциональные точным оценкам соответствующих сигналов сравнения, полученным в результате оптимальной адаптивной фильтрации, с помощью которых корректируют сигналы, пропорциональные соответственно текущим значениям параметров вектора визирования цели, после чего по сигналам, полученным в результате коррекции, формируют управляющие сигналы, по которым производят поворот зеркала антенны по углу наклона и по азимуту, которые затем преобразуют с учетом переменной электрической редукции в углы поворота линии визирования по углу наклона и по азимуту относительно корпуса подвижного носителя до совмещения ее с направлением на ОВ, при автосопровождении ОВ по дальности отфильтрованный сигнал рассогласования интегрируют во времени и получают сигналы, пропорциональные наклонной дальности и скорости сближения подвижного носителя с ОВ, одновременно формируют сигналы, пропорциональные скорости изменения соответственно углов визирования ОВ в горизонтальной и в вертикальной плоскости в горизонтальной системе координат, сигналы стабилизации подвижного носителя от колебаний относительно своего центра масс в горизонтальной плоскости, в вертикальной плоскости и по крену, сигналы самонаведения подвижного носителя на ОВ, пропорциональные перегрузкам соответственно в горизонтальной и в вертикальной плоскости, преобразуют эти сигналы в сигналы управления рулевым приводом подвижного носителя для обеспечения стабилизации и самонаведения подвижного носителя на ОВ согласно принятому закону самонаведения.
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ИНТЕНСИВНО МАНЕВРИРУЮЩУЮ ВОЗДУШНУЮ ЦЕЛЬ | 2004 |
|
RU2254542C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РАКЕТОЙ КЛАССА "ВОЗДУХ-ВОЗДУХ" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2099665C1 |
| US 4542870 А, 24.09.1985 | |||
| US 4898341 А, 06.02.1990 | |||
| СПОСОБ ПРОВЕДЕНИЯ СОСТЯЗАНИЯ ВОДИТЕЛЕЙ ТРАНСПОРТНЫХ СРЕДСТВ И ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2261133C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2001 |
|
RU2189625C1 |

