Изобретение относится к способу широтно-импульсной модуляции для последовательно включенных преобразователей, осуществляемому согласно дополнительной части пункта 1 формулы изобретения. Например, изобретение может быть применено, но без ограничения указанными случаями, для двухточечных или трехточечных преобразователей в системе привода для рельсовых транспортных средств.
Из патента ФРГ DE 19614627 A1 известна система преобразователей электроэнергии для питания по меньшей мере одного потребителя от высоковольтной сети, причем система преобразователей содержит множество подсистем преобразователей, и каждая такая система подсистема состоит, по меньшей мере, из одного входного преобразователя энергии, промежуточной цепи напряжения и одного инвертора. Существенным отличием является то, что эта система преобразователей реализована без включенного вверх по технологической цепочке промежуточного или включенного вниз по технологической цепочке трансформатора, что приводит к уменьшению массы, объема и стоимости.
Когда используется вышеописанная система преобразователей энергии в качестве приводной системы для рельсовых транспортных средств, то возникающие в контактном проводе гармоники тока определяются посредством способа широтно-импульсной модуляции и главным входным индуктором. Так как на приводные мощности приводных двигателей среди прочих условий влияют еще устройства регулирования скольжения, то нельзя исходить из того, что приводные мощности приводных двигателей равны при всех режимах работы. Однако разные приводные мощности вызывают различный уровень возбуждения разных преобразователей мощности (разные коэффициенты модуляции), что может привести к возникновению помех при магистральной подаче электроэнергии. Поэтому применяемый способ широтно-импульсной модуляции имеет большое значение для минимизации влияния нагрузки от высших гармоник.
В основу изобретения положена задача создания способа широтно-импульсной модуляции такого типа, который пригоден как для двухточечных преобразователей, так и для трехточечных преобразователей, который допускал бы только очень малые помехи в магистральной подаче электроэнергии последовательно включенных преобразователях, работающих в режиме с разными коэффициентами модуляции.
Поставленная задача решается признаками, указанными в отличительной части 1 пункта формулы изобретения, в сочетании с признаками, указанными в отличительной части 1 пункта.
Достигаемые благодаря изобретению преимущества заключаются, в частности, в том, что формы импульсов, получаемые при различных режимах работы с разным уровнем возбуждения (разные коэффициенты модуляции) отдельных, подключенных к различным нагрузкам преобразователей мощности, оптимизируют с учетом возникающих высших гармоник.
Состоящая из трех последовательно включенных трехточечных преобразователей подсистема генерирует высшие гармоники при двенадцатитактовой частоте коммутации полупроводника. Фазовый угол этих высших гармоник зависит от уровня возбуждения, следовательно может произойти то, что в худшем случае фазовые углы первых высших гармоник этих подсистем будут смещены на угол 180°. В этом случае в общей системе возникает высшая гармоника двойной амплитуды, по сравнению с одной подсистемой. Объединение импульсов двух подсистем без межимпульсного интервала импульсов, согласно изобретению, заметно снижает максимальную амплитуду при двенадцатитактовой частоте коммутации.
Уменьшение генерации высших гармоник обеспечивает возможность уменьшения размера главного входного индуктора, приводит к снижению себестоимости при его производстве, к экономии его массы и занимаемого им объема.
Преимущество применения способа широтно-импульсной модуляции в силовых преобразователях для рельсовых транспортных средств заключается в том, что на сигнальные установки и на установки контроля протяженности свободного пути, находящиеся непосредственно вблизи от контактного провода, высшие гармоники не оказывают негативного влияния.
Ниже изобретение более подробно описано на примерах его выполнения со ссылками на чертежи, на которых
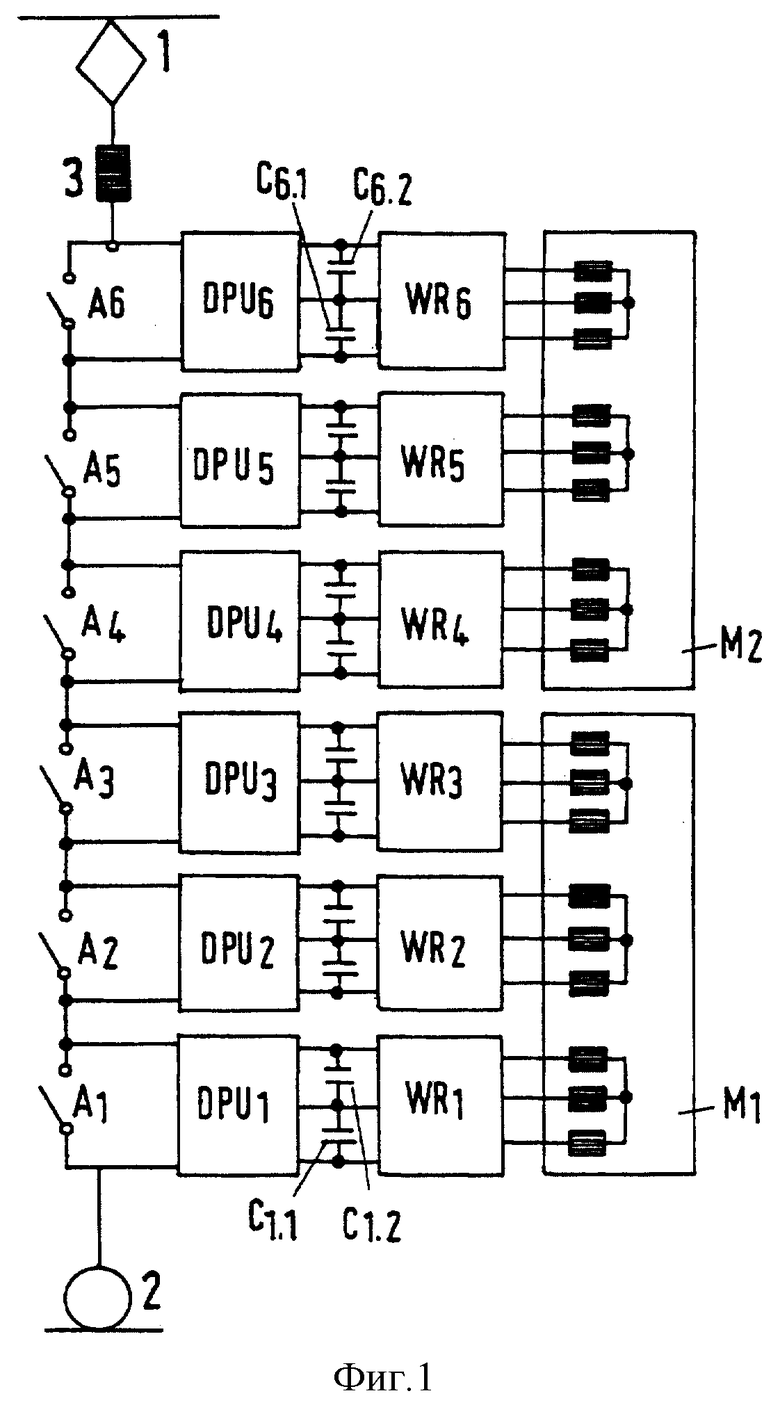
Фиг.1 изображает компоновку схемы, имеющей множество последовательно подключенных со стороны переменного тока трехточечных преобразователей;
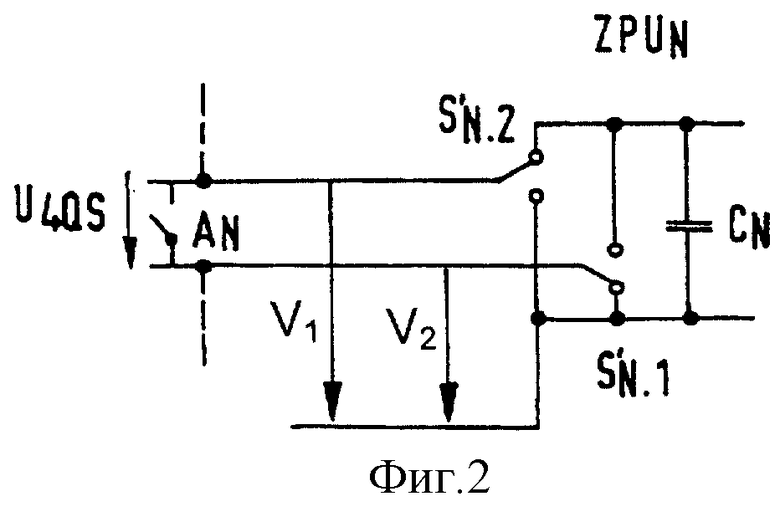
Фиг.2 - принципиальная электрическая схема отдельного двухточечного преобразователя;
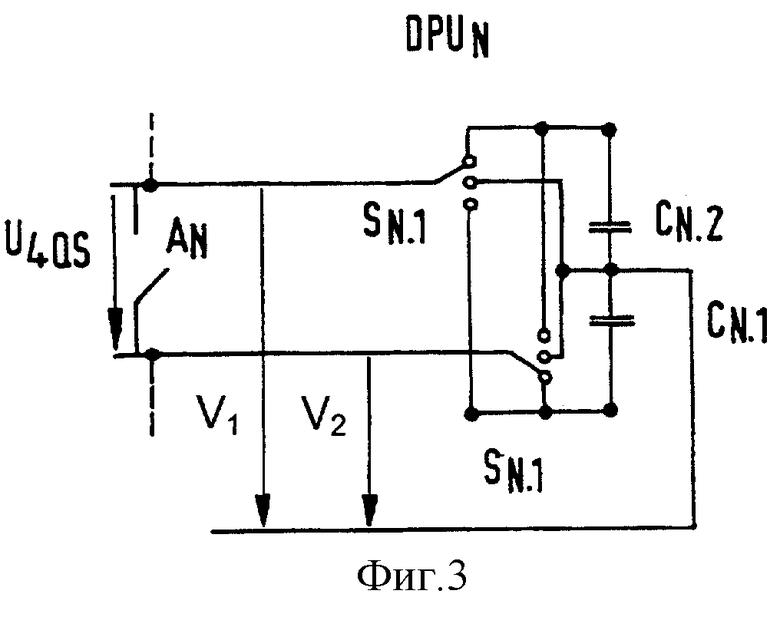
Фиг.3 - принципиальная электрическая схема отдельного трехточечного преобразователя;
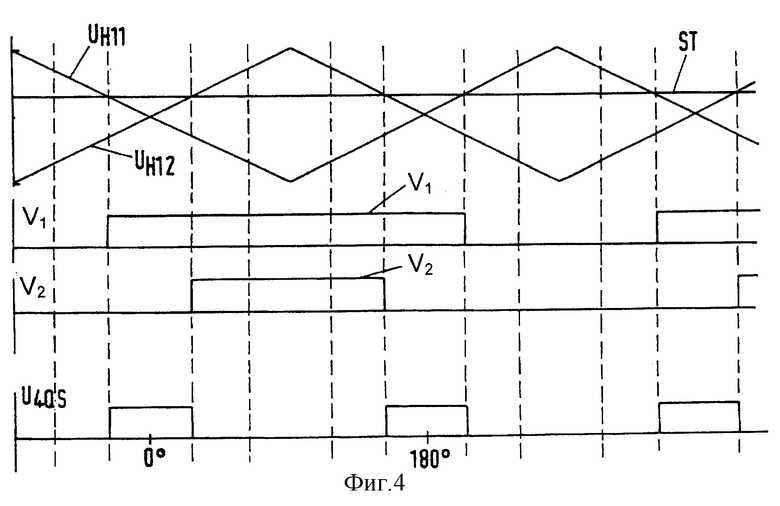
Фиг.4 - иллюстрация широтно-импульсной модуляции при использовании двухточечного преобразователя;
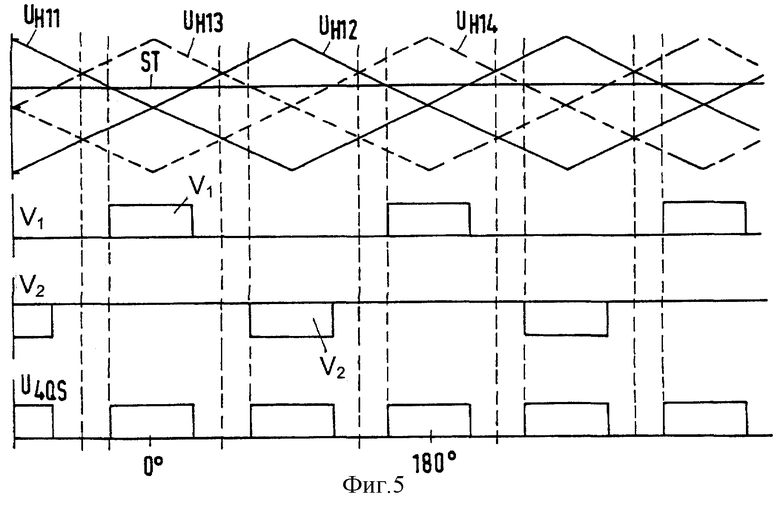
Фиг.5 - иллюстрация широтно-импульсной модуляции при использовании трехточечного преобразователя;
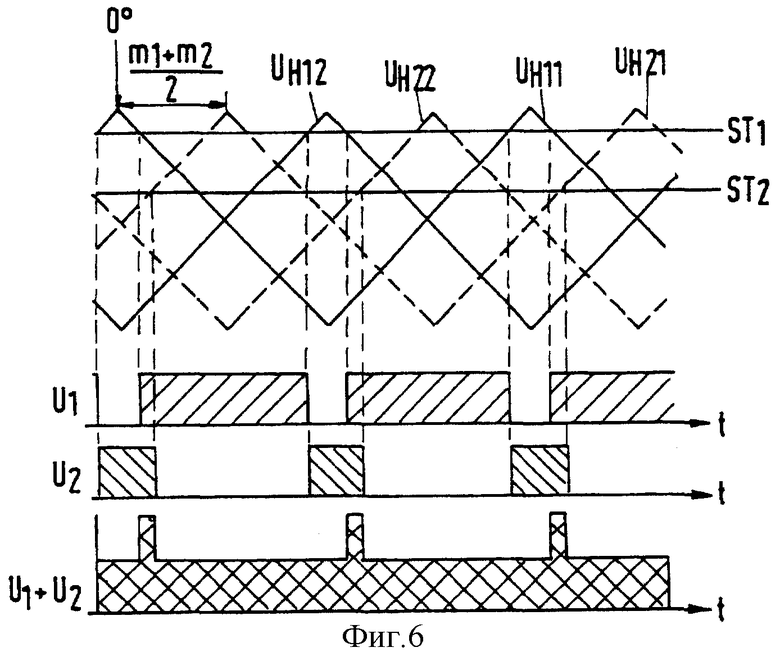
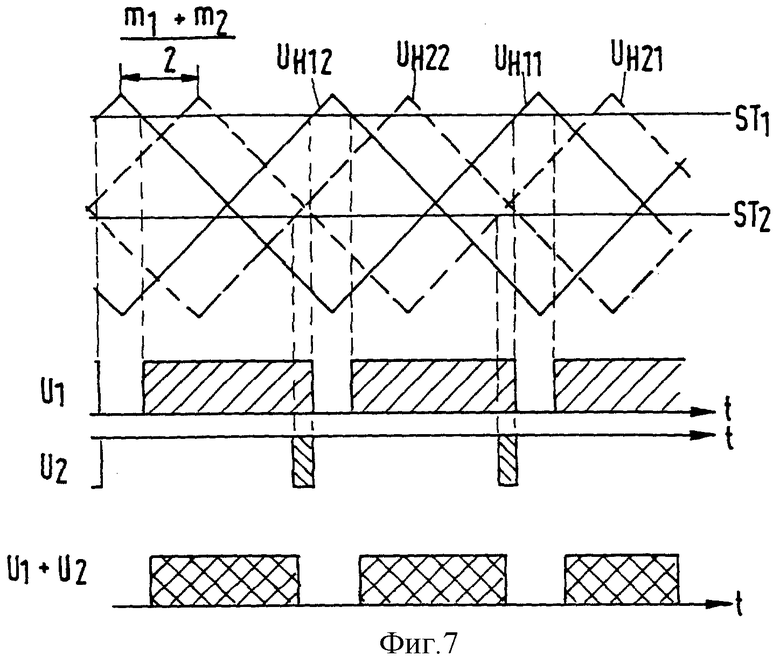
Фиг.6 и 7 - иллюстрации формирования импульсов напряжения при смещении несущего сигнала;
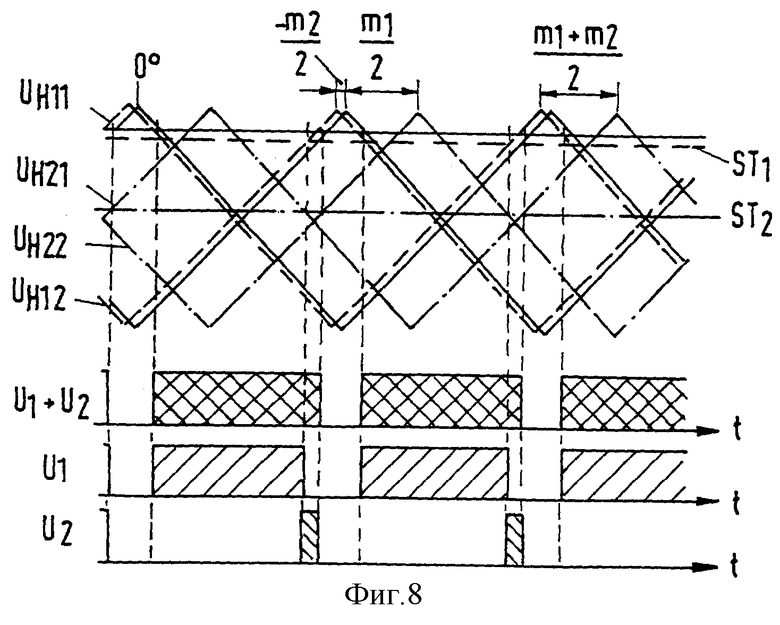
Фиг.8 - иллюстрация формирования импульсов напряжения при смещении двух несущих сигналов.
На Фиг.1 показана схема, имеющая множество последовательно включенных со стороны переменного тока трехточечных преобразователей. Между системой 1 “контактный провод/токоприемник” с подключенным за ней главным входным индуктором 3 и системой 2 “колесо-рельс” включено последовательно несколько трехточечных преобразователей DPU1, DPU2...DPU6. В общем, dpun соответствует любому подключенному последовательно со стороны переменного тока трехточечному преобразователю (N=1, 2, 3, 4, 5, 6...). Каждый из трехточечных преобразователей может быть шунтирован посредством выключателя А1, А2...А6 (общее число AN).
К системе 1 “контактный провод/токоприемник” приложено переменное напряжение, в то время как система 2 “колесо-рельс” заземлена, т.е. находится под потенциалом Земли. Со стороны постоянного напряжения каждый точечный преобразователь питает промежуточную цепь, которая в каждом случае имеет два промежуточных конденсатора C1.1, C1.2, C2.1, C2.2...С6.1, С6.2 (в общем CN.1, СN.2). К каждой из этих промежуточных цепей присоединен свой собственный инвентор WR1, WR2...WR6 (в общем WRN). Каждые три инвентора предназначены для питания одного включенного по трехзвездочной схеме двигателя, так что первый включенный по трехзвездочной схеме двигатель M1 подключен к трем инвенторам WR1, WR2, WR3, а второй такой двигатель М2 - к трем другим инвенторам WR4, WR5, WR6.
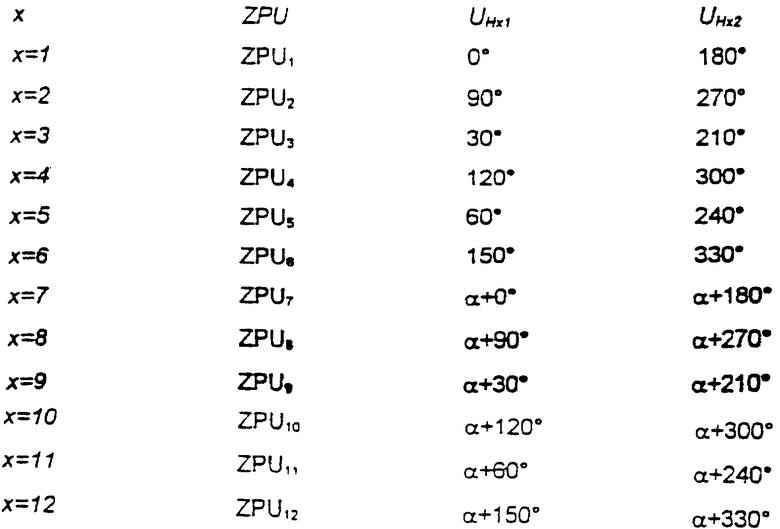
Для схемы, выполненной согласно Фиг.1, вместо шести трехточечных преобразователей DPU1, DPU2...DPU6 могут быть использованы двенадцать двухточечных преобразователей ZPU1-ZPU12. В этом случае промежуточные конденсаторы С1.1, C1.2,...Cn.1, Cn.2 в цепи могут быть заменены промежуточными конденсаторами C1...СN. К каждому двухточечному преобразователю подсоединен один инвентор. Каждый из этих инвенторов питает через работающий с высокой частотой (например 500 Гц) трансформатор выпрямитель, при этом каждые шесть выпрямителей питают общую промежуточную цепь. К каждой из этих двух промежуточных цепей через инвентор подключена нагрузка (двигатель).
На Фиг.2 показана принципиальная электрическая схема отдельного двухточечного преобразователя ZPUN. Каждый двухточечный преобразователь имеет два электронных переключателя S’N.1, S’N.2 (каждый переключатель имеет два положения коммутации и реализован двумя силовыми преобразовательными вентилями), посредством которых общеизвестным образом на оба контакта конденсатора CN промежуточной цепи, связанного с каждым из двухточечных преобразователей, может подаваться напряжение. Импульсные напряжения электронных переключателей обозначены V1, V2, кроме того, показано напряжение U4QS=V1-V2.
На Фиг.3 показана принципиальная электрическая схема отдельного трехточечного преобразователя. Каждый трехточечный преобразователь PDUN имеет два электронных переключателя SN.1, SN.2 (каждый переключатель имеет три положения коммутации и реализуется четырьмя силовыми преобразовательными вентилями), посредством которых напряжение может общеизвестным образом подаваться на оба внешние контакта и/или на общий контакт из двух последовательно соединенных промежуточных схемных конденсаторов CN.1, СN.2, предназначенных для каждого трехточечного переключателя. Импульсы напряжения электронных переключателей обозначены как V1, V2, кроме того, показано напряжение U4QS=V1-V2.
На Фиг.4 изображена известная широтно-импульсная модуляция при применении двухточечного преобразователя. В общих чертах представлены несущие сигналы UH11 и UH12 для обоих электронных переключателей. Благодаря образованию точек пересечения несущих сигналов с управляющим напряжением ST, заданным в соответствии с коэффициентами модуляции, ограничивают начало и конец импульсов напряжения V1 и V2.
На Фиг.5 показана известная широтно-импульсная модуляция при применении трехточечного преобразователя, которая может быть получена из двух смещенных широтно-импульсных модуляций двухточечного преобразователя. Так как с точки зрения широтно-импульсной модуляции два последовательно включенных двухточечных преобразователя при соответствующем смещении подачи таковых импульсов ведут себя как один трехточечный преобразователь, в соответствии с этим получают четыре несущих сигнала UH11, UH12, UH13 и UH14 для двух электронных переключателей, благодаря образованию точек пересечения несущих сигналов с управляющим напряжением ST ограничивают начало и конец импульсов V1 и V2 напряжения. Падающий и нарастающий фронты импульсов находятся на том же самом месте, что и у двухточечного преобразователя, однако импульсов появляется в два раза больше.
Импульсные последовательности электронных переключателей реализуют предпочтительно общеизвестным методом естественной выборки, при этом осуществляют смещенную подачу таковых импульсов отдельных преобразователей, чтобы достигнуть оптимального режима работы всего устройства при генерации как можно меньших высших гармоник. В этом случае подразумевается, что три питающих двигатель M1 инвентора WR1, WR2, WR3 и шесть двухточечных преобразователей (первая подсистема) в каждом случае управляются в режиме с одинаковым коэффициентом m1 модуляции. А три питающих двигатель М2 инвентора WR4, WR5, WR6 и шесть двухточечных преобразователей (вторая подсистема, обе подсистемы подключены последовательно и образуют общую систему) в каждом случае управляются в режиме с одинаковым коэффициентом m2 модуляции. Оба коэффициента модуляции могут изменяться в зависимости от разных режимов работы присоединенных нагрузок.
Коэффициент модуляции, равный 1, соответствует 100%-ному уровню возбуждения двигателя (максимальный уровень возбуждения), коэффициент модуляции, равный 0,5, соответствует 50%-ному уровню возбуждения двигателя. Коэффициент модуляции, равный 0,1, соответствует 10%-ному уровню возбуждения, а коэффициент модуляции, равный 0,2, соответствует 20%-ному уровню возбуждения генератора и так далее.
Задача описываемого далее способа широтно-импульсной модуляции, согласно изобретению, состоит в том, чтобы соединить друг с другом два импульса первой и второй подсистем в один безынтервальный импульс. Широтно-импульсные модуляции каждой подсистемы работают со смещением. Как это уже было описано выше со ссылкой на трехточечный преобразователь, у них сохраняются нарастающий и падающий фронты, а также ширина импульсов, однако удваивается число импульсов за период по сравнению двухточечным преобразователем. По этой причине нижеследующие разъяснения, относящиеся главным образом к способу широтно-импульсной модуляции применительно к двухточечному преобразователю, могут быть просто применены для трехточечного преобразователя.
На Фиг.6 иллюстрируется формирование импульсов напряжения с одним несущим сигналом, сдвинутым в соответствии с настоящим изобретением на угол α. На этой диаграмме можно видеть временные зависимости несущих сигналов (треугольный сигнал, вспомогательное напряжение, вспомогательное управляющее напряжение) UH11, UH12 (непрерывные линии), принадлежащие двухточечному преобразователю DPU1, а также временные характеристики несущих сигналов UH21, UH22 (пунктирные линии), принадлежащие двухточечному преобразователю DPU1. Несущие сигналы UH11, UH12 смещены относительно друг друга на 180 градусов, подобно как и несущие сигналы UH21, UH22. Несущие сигналы UН11, UH12 пересекаются с управляющим напряжением ST1 (непрерывная линия), соответствующим коэффициенту m1 модуляции, при этом точки пересечения ограничивают начало и конец формируемых двухточечным преобразователем DPU1 импульсов напряжения U1=U4QS. Подобным образом несущие сигналы UH21, UH22 пересекаются с управляющим напряжением ST2 (пунктирная линия), соответствующим коэффициенту m2 модуляции, при этом точки пересечения ограничивают начало и конец импульсов напряжения U2=U4QS2, формируемых двухточечным преобразователем DPU1. Коэффициенты m1 и m2 модуляции не идентичны, так как двигатели M1 и М2 работают с разными мощностями.
Согласно изобретению несущие сигналы UH21, UH22 для преобразователей второй подсистемы смещают по отношению к остающимся неизменными несущим сигналам UH11, UH12 для преобразователей первой подсистемы на угол α, причем как и для двухточечного преобразователя, так и для трехточечного преобразователя действительна формула

при смещении несущих сигналов несущие сигналы UH11, UH12 соответственно остаются неизменными (см. маркировку 0 град.), в то время как несущие сигналы UH21, UH22 смещаются на угол α таким образом, что конец импульса U1 напряжения совпадает с началом импульса напряжения U2, т.е. между импульсами напряжения не возникает никакого промежутка. Таким образом, в результате этого двумя импульсными последовательностями задается поведение системы, как это соответствует одной импульсной последовательности - с результатом предпочтительно уменьшения высших гармоник. Результирующая сумма импульсов напряжения (суммарное напряжение) U1+U2 также показана на диаграмме.
В динамических случаях может случиться, что мгновенно один коэффициент модуляции станет отрицательным (уровень возбуждения генератора), а другой - положительным (уровень возбуждения двигателя). В этом случае также результатом является благоприятный сдвиг импульсов, согласно вышеуказанной формуле, на угол α, так как в этом случае отрицательный импульс сходится с положительным импульсом. На Фиг.7 иллюстрируется соответствующий пример выполнения, из которого можно видеть, что вследствие сдвига несущих сигналов на угол α конец импульса напряжения U1 и конец импульса напряжения U2 совпадают.
Результаты двухточечного преобразователя (текущий индекс Х=1, 2, 3...12) следующие:
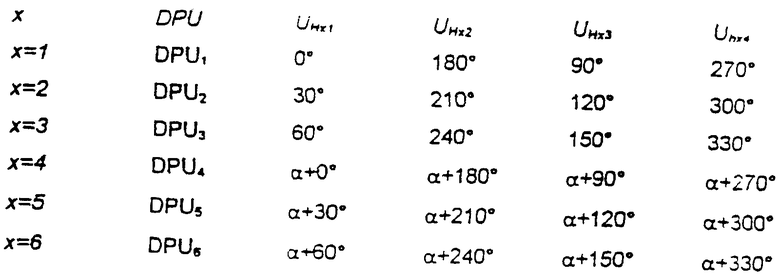
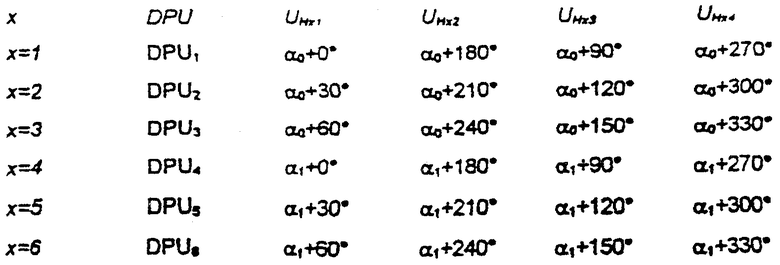
Для трехточечного преобразователя получают (текущий индекс x=1, 2, 3...6):
На Фиг.8 иллюстрируется формирование импульсов напряжения со смещением двух несущих сигналов. Согласно изобретению, в этом варианте несущие сигналы UH21, UH22 (см. штрих-пунктирные линии) для преобразователей второй подсистемы смещены на угол α1, а несущие сигналы UН11, UН12 (см. штрих-пунктирные линии) для преобразователей первой системы смещены на угол α0. Это дает преимущество, состоящее в том, что результирующие импульсы симметричны относительно друг друга. Таким образом, действительно (как и для двухточечных, так и для трехточечных преобразователей):
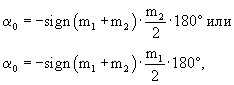
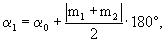
или для другого варианта:
Также немного измененные формулы дают хорошие результаты, например, согласно первому варианту:
или согласно второму варианту:
или согласно третьему варианту:
или согласно четвертому варианту:

или согласно пятому варианту:
При меньших требованиях возможно применение более упрощенных формул.
Для ограничения сдвигов или углов, несущий сигнал, который пересекает отметку 0 град., но не используется в этом варианте, дополнительно иллюстрируется на Фиг.8 (см. сплошные линии), соответствующие коэффициентам m1 и m2 модуляции управляющие напряжения ST1 (см. штриховую линию) и ST2 (см. штрих-пунктирную линию) также иллюстрируются на диаграмме.
Для двухточечного преобразователя получены следующие результаты:

Для трехточечного преобразователя получено:
Обе альтернативные возможности, согласно Фиг.6, 7 и 8, эквивалентны снижению высших гармоник.
Предложен способ широтно-импульсной модуляции для включенных последовательно двухточечных или трехточечных преобразователей, в котором импульсы напряжения (U1) первого преобразователя с первым коэффициентом модуляции (m1) и импульсы напряжения (U2) второго преобразователя со вторым коэффициентом модуляции (m2) суммируют таким образом, что образуется один общий, безынтервальный импульс напряжения (U1+U2). Суммарные импульсы напряжения (U1+U2) симметричны относительно последующих суммарных импульсов напряжения. Также сформированные импульсные последовательности оптимизированы с учетом появляющихся высших гармоник. Технический результат - минимизация влияния нагрузки от высших гармоник. 9 з.п. ф-лы, 8 ил.

 п.3, отличающийся тем, что несущие сигналы первого преобразователя, имеющего коэффициент m1 модуляции, сдвигают на угол α1, а несущие сигналы второго преобразователя, имеющего коэффициент m2 модуляции, сдвигают на угол α0, при этом соблюдают следующие соотношения:
п.3, отличающийся тем, что несущие сигналы первого преобразователя, имеющего коэффициент m1 модуляции, сдвигают на угол α1, а несущие сигналы второго преобразователя, имеющего коэффициент m2 модуляции, сдвигают на угол α0, при этом соблюдают следующие соотношения:
| Стабилизированная трехфазная система питания | 1989 |
|
SU1777128A1 |
| СПОСОБ СЛЕДЯЩЕГО ДИСКРЕТНОГО РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ | 1991 |
|
RU2025763C1 |
| US 4528494 А, 09.07.1985. | |||

