Изобретение относится к области железнодорожного транспорта, а более конкретно к устройству контроллеров крана машиниста тормоза железнодорожного транспортного средства, предназначенных для дистанционного управления краном машиниста путем подачи электрических сигналов на электропневматические управляющие органы крана машиниста, например на электромагнитные вентили, связанные с уравнительным органом и уравнительным резервуаром крана машиниста. Уравнительный орган осуществляет наполнение тормозной магистрали сжатым воздухом и его выпуск из нее в зависимости от тормозной позиции, в которую установлен контроллер крана машиниста.
Известен контроллер крана машиниста типа 395 (см.:1) Каталог "Автотормозное и пневматическое оборудование подвижного состава рельсового транспорта", Москва 1999 г., стр.16; 2) книга "Тормозное и пневматическое оборудование подвижного состава", авторы В.Г.Иноземцев, И.В.Абашкин; Москва, 1984 г., стр.69).
Он содержит корпус, выполненный в виде диска, закрепленный на корпусе пневматической части крана машиниста. На корпусе контроллера установлены микровыключатели, которые соединены с источником электрического питания и через электрические цепи соединены с электропневматическими органами (электромагнитными вентилями) электровоздухораспределителей электропневматического тормоза железнодорожного транспортного средства, например пассажирского поезда с локомотивной тягой. Контроллер закрыт крышкой. Рукоятка управления крана машиниста типа 395 одновременно является и рукояткой управления контроллера. Она снабжена кулачковым элементом с выступами на наружной поверхности. Рукоятка имеет положения тормозных позиций зарядки (I), поездного (II), перекрыши без питания (III) тормозной магистрали, перекрыши с питанием (IV) тормозной магистрали, замедленного служебного торможения (VA), служебного торможения (V), экстренного торможения (VI). В положениях (I), (II) кулачок рукоятки контроллера не воздействует на микровыключатели, питание на электрические цепи электропневматического тормоза не подается, что соответствует отпускному положению этого тормоза. В положениях (VA), (V), (VI) кулачок рукоятки воздействует на соответствующий микровыключатель, и в электрические цепи электропневматического тормоза подается электрическое питание. Осуществляется торможение электропневматическим тормозом. Таким образом, этим контроллером осуществляется только дистанционное управление электровоздухораспределителями тормоза железнодорожного транспортного средства и отсутствует возможность дистанционного управления краном машиниста.
Известен контроллер крана машиниста тормоза железнодорожного транспортного средства по авторским свидетельствам №368095 от 03.03.71 г., №382534 от 09.11.70 г., МПК В 60 Т 7/16. Он содержит корпус, рукоятку управления со стержнем, которая имеет четыре положения тормозных позиций - положения поездное, перекрыши с питанием, служебного торможения, экстренного торможения. Контроллер связан с источником электрического питания. На корпусе контроллера размещены электрические контакты соответствующих тормозных позиций. При постановке рукоятки управления со стержнем в требуемую тормозную позицию, например в позицию служебного торможения, замыкается соответствующий электрический контакт. Напряжение (электрический управляющий сигнал) подается на соответствующий электропневматический орган - электромагнитный вентиль служебного торможения крана машиниста. Электромагнитный вентиль срабатывает, пневматически воздействуя на уравнительный орган с уравнительным резервуаром крана машиниста. Уравнительный орган осуществляет сообщение тормозной магистрали с атмосферой. Если железнодорожное транспортное средство оборудовано электропневматическим тормозом, то в соответствующих тормозных позициях контроллера осуществляется подача электрических сигналов в электрические цепи электровоздухораспределителей электропневматического тормоза. Таким образом, в этом кране машиниста контроллер осуществляет дистанционное управление как электропневматическим тормозом, так и краном машиниста. Однако в ряде тормозных позиций, например в позиции зарядки и отпуска, управление осуществляется не только контроллером, но и дополнительными кнопками управления, воздействующими на дополнительные контакты. Это усложняет управление краном машиниста. Кроме того, при замыкании электрических контактов возможно их оплавление, возникновение электрической дуги, что может нарушить целостность электрической цепи, исключить возможность подачи электрического управляющего сигнала на управляющие электропневматические органы (электропневматические вентили) крана машиниста.
Наиболее близким по совокупности существенных признаков заявляемому контроллеру крана машиниста тормоза железнодорожного транспортного средства является контроллер крана машиниста тормоза железнодорожного транспортного средства по авторскому свидетельству №737271 от 15.12.77 г., МПК В 60 Т 15/04. Он содержит корпус, рукоятку управления с положениями тормозных позиций зарядки, поездного, перекрыш, торможений. Рукоятка управления связана с устройством включения органов передачи электрического управляющего сигнала от источника питания к управляющим электропневматическим органам крана машиниста соответствующей тормозной позиции и к электровоздухораспределителям электропневматического тормоза. В этом контроллере орган передачи электрического управляющего сигнала от источника питания к управляющему органу крана машиниста каждой тормозной позиции выполнен в виде микропереключателя, связанного электрическими цепями с источником питания и с соответствующим управляющим электропневматическим органом крана машиниста (например, с электромагнитным вентилем служебного торможения). Устройство включения органов передачи электрического управляющего сигнала от источника питания к управляющему электропневматическому органу крана машиниста в этом контроллере выполнен в виде стержня, связанного с рукояткой управления и имеющего выступы и углубления на поверхности, обращенной в сторону микровыключателей для воздействия на них. В процессе работы контроллера при замыкании электрических контактов микровыключателей возможно их оплавление, образование электрической дуги. Это может нарушить целостность электрических цепей, исключить возможность подачи электрического управляющего сигнала на управляющие электропневматические органы (электромагнитные вентили) крана машиниста и на электровоздухораспределители электропневматического тормоза. При переводе устройства включения органа передачи электрического управляющего сигнала из одной тормозной позиции в другую, например из позиции сверхзарядки в поездую, передача электрического управляющего сигнала в предыдущей тормозной позиции прекращается, а в следующей позиции еще не возникает. Таким образом, при переходе из одной тормозной позиции в другую происходит потеря электрических управляющих сигналов в кране машиниста, что может привести, например, к возникновению самопроизвольного торможения при переходе от сверхзарядки к поездному. Это нарушает управляемость краном машиниста, что, в свою очередь, снижает управляемость тормоза железнодорожного транспортного средства.
Заявляемый контроллер крана машиниста тормоза железнодорожного транспортного средства решает задачу повышения надежности действия контроллера крана машиниста, повышения управляемости краном машиниста, повышения управляемости тормоза железнодорожных транспортных средств.
Технический результат, который будет получен при осуществлении предлагаемого изобретения, заключается в исключении возможности нарушения процесса передачи электрического управляющего сигнала на управляющий электропневматический орган крана машиниста в каждой тормозной позиции крана машиниста, в обеспечении подачи электрического управляющего сигнала на соответствующий электропневматический орган крана машиниста в каждой предыдущей тормозной позиции в процессе перевода устройства включения органа передачи управляющего электрического сигнала в последующую тормозную позицию и до начала срабатывания органа передачи электрического управляющего сигнала в этой последующей позиции.
Указанный технический результат достигается тем, что в известном контроллере крана машиниста тормоза железнодорожного транспортного средства, содержащем корпус, рукоятку управления с положениями тормозных позиций зарядки, поездного, перекрыш, торможений, а также содержащем орган передачи электрического управляющего сигнала от источника питания к управляющему электропневматическому органу крана машиниста каждой тормозной позиции, устройство включения органов передачи электрического управляющего сигнала, связанное с рукояткой управления, орган передачи электрического управляющего сигнала от источника питания к управляющему электропневматическому органу крана машиниста каждой тормозной позиции содержит размещенную на корпусе контроллера магнитоуправляемую микросхему, включающую в себя датчик Холла, усилитель и триггер, а также содержит размещенные на корпусе контроллера элемент задержки времени распространения электрического управляющего сигнала и триггер RS типа с перекрестными связями, при этом выход триггера магнитоуправляемой микросхемы соединен со входом R триггера RS типа через элемент задержки времени распространения электрического управляющего сигнала, а также соединен с входом S триггера RS типа через диод, включенный в обратном направлении, а входы S триггеров RS типа всех тормозных позиций соединены между собой. Кроме того, в предлагаемом контроллере крана машиниста устройство включения органов передачи электрического управляющего сигнала от источника питания к управляющему электропневматическому органу крана машиниста выполнено в виде Ш-образного магнитопровода, на внешних неподвижных сердечниках которого расположены катушки подмагничивания, размещенные на корпусе контроллера, являющемся основанием магнитопровода, а центральный сердечник выполнен в форме магнитного концентратора и связан с рукояткой управления с возможностью перемещения от одной тормозной позиции к другой с зазором над органами передачи электрического управляющего сигнала, при этом величина зазора над геометрическим центром магнитоуправляемой микросхемы органа передачи электрического управляющего сигнала соответствующей тормозной позиции меньше величины зазора над основанием магнитопровода между магнитоуправляемыми микросхемами органов передачи электрического управляющего сигнала, а катушки подмагничивания подключены к источнику питания последовательно со стабилизатором. Предлагаемый контроллер крана машиниста снабжен органом предварительной установки триггеров RS типа, параллельно подключенным к указанным триггерам и имеющим последовательно включенные стабилитрон и резистор, к общей точке которых подключены два последовательно включенных логических элемента НЕ, при этом выход второго логического элемента НЕ соединен с входом S триггеров RS типа через диод, включенный в обратном направлении.
Такое выполнение предлагаемого контроллера крана машиниста тормоза железнодорожного транспортного средства исключает возможность нарушения процесса передачи электрического управляющего сигнала на управляющей электропневматический орган крана машиниста в каждой тормозной позиции крана машиниста, обеспечивает подачу электрического управляющего сигнала на соответствующий управляющий электропневматический орган крана машиниста в каждой предыдущей тормозной позиции в процессе перевода устройства включения органа передачи электрического управляющего сигнала в последующую тормозную позицию и до начала срабатывания органа передачи электрического управляющего сигнала в этой последующей позиции.
Это объясняется следующим образом. При подаче питания на контроллер от источника питания через катушки подмагничивания и стабилитрон начинает протекать электрический ток, создающий в катушках магнитное поле и стабилизированное напряжение питания. Это стабилизированное напряжение прикладывается к стабилитрону и резистору органа предварительной установки триггеров RS типа. На входе первого логического элемента НЕ в первоначальный момент образуется потенциал, равный нулю, а затем при пробое стабилитрона на входе первого логического элемента НЕ образуется потенциал, равный единице. Тогда на выходе второго логического элемента НЕ будет такая же последовательность потенциалов. Точно такая же последовательность потенциалов через диод приложится к входу S триггера RS типа всех органов передачи электрического управляющего сигнала от источника питания к управляющему электропневматическому органу крана машиниста во всех тормозных позициях. Таким образом, на входах S и R триггера RS типа установится потенциал, равный единице. Произойдет предварительная установка (предустановка) всех триггеров RS типа в исходное состояние, и на выходе Q всех этих триггеров RS типа установится потенциал, равный единице, а на выходе Q всех триггеров RS типа установятся потенциалы, равные нулю. При этом магнитный концентратор, связанный с рукояткой управления, находится между магнитоуправляемыми микросхемами органов передачи электрического управляющего сигнала от источника питания к управляющему электропневматическому органу крана машиниста. Указанные органы передачи электрического управляющего сигнала располагаются на основании магнитопровода через равные интервалы в положениях, соответствующих тормозным позициям рукоятки управления.
При подаче электрического питания магнитные потоки катушек подмагничивания складываются в магнитном концентраторе и при его линейном перемещении вдоль магнитопровода величина индукции остается постоянной. Величина индукции выбирается достаточной для срабатывания магнитоуправляемой микросхемы органа передачи электрического управляющего сигнала, когда магнитный концентратор расположен над геометрическим центром магнитоуправляемой микросхемы. При этом траектория движения магнитного концентратора над основанием магнитопровода выбрана с учетом того, что при нахождении магнитного концентратора над геометрическим центром магнитоуправляемой микросхемы величина зазора между ними обеспечивает ее срабатывание, а при движении магнитного концентратора от магнитоуправляемой микросхемы одного органа передачи электрического управляющего сигнала до магнитоуправляемой микросхемы следующего органа передачи электрического управляющего сигнала величина зазора между магнитным концентратором и основанием магнитопровода исключает возможность срабатывания магнитоуправляемой микросхемы.
Для включения в действие тормоза железнодорожного транспортного средства, например пассажирского поезда с локомотивной тягой, оборудованного электропневматическим тормозом, рукоятку управления с магнитным концентратором устанавливают во вторую тормозную позицию - поездную позицию. Магнитный концентратор располагается над геометрическим центром магнитоуправляемой микросхемы органа передачи электрического управляющего сигнала, размещенного в поездной позиции. Магнитоуправляемая микросхема срабатывает. На выходе этой магнитоуправляемой микросхемы появляется потенциал, равный нулю. На входе S триггера RS типа органов передачи электрического управляющего сигнала всех тормозных позиций через диод также появляется потенциал, равный нулю. На входе R триггера RS типа органа передачи электрического управляющего сигнала, размещенного в поездной позиции, появляется потенциал, равный нулю. Потенциал на выходе Q триггера RS типа органов передачи электрического управляющего сигнала, находящихся в неработающих тормозных позициях, остается равным единице. На выходе Q триггера RS типа органа передачи электрического управляющего сигнала поездной позиции появится потенциал, равный единице, а на его выходе Q появится потенциал, равный нулю. В поездной позиции от органа передачи электрического управляющего сигнала по электрической цепи потечет электрический ток к соответствующему управляющему электропневматическому органу крана машиниста, т.е. будет осуществляться передача электрического управляющего сигнала в этой позиции. Выход Q триггера RS типа всех органов передачи электрического управляющего сигнала, находящихся в неработающих тормозных позициях, будет иметь потенциал, равный нулю. Подача электрического управляющего сигнала в этих тормозных позициях не происходит.
При перемещении магнитного концентратора в следующую тормозную позицию, т.е. от предыдущей магнитоуправляемой микросхемы до последующей магнитоуправляемой микросхемы и до момента установки магнитного концентратора над геометрической осью последующей магнитоуправляемой микросхемы и ее срабатывания на выходе R триггера RS типа предыдущего органа передачи электрического управляющего сигнала сохраняется потенциал, равный нулю. Это происходит потому, что между выходом магнитоуправляемой микросхемы и входом R триггера RS типа включен элемент задержки времени распространения электрического управляющего сигнала, состоящий из резистора и конденсатора. Постоянная времени этого элемента выбрана равной сумме времени прохождения магнитного концентратора от предыдущей до последующей тормозной позиции и времени включения в действие последующей магнитоуправляемой микросхемы. Таким образом, конденсатор, подключенный непосредственно к входу R триггера RS типа, сохраняет на входе R потенциал, равный нулю, тем самым сохраняя на выходе Q триггера RS типа потенциал, равный единице на время, пока с последующей тормозной позиции не начнет поступать электрический управляющий сигнал на соответствующий управляющий электропневматический орган крана машиниста. То есть происходит сохранение предыдущего электрического управляющего сигнала до появления последующего электрического управляющего сигнала.
На представленных чертежах схематично изображены общий вид предлагаемого контроллера крана машиниста тормоза железнодорожного транспортного средства и электрическая схема предлагаемого контроллера крана машиниста (пример выполнения).
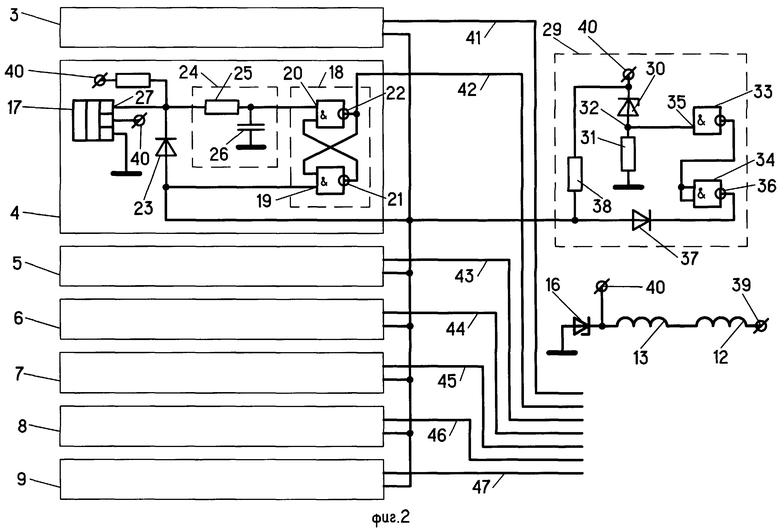
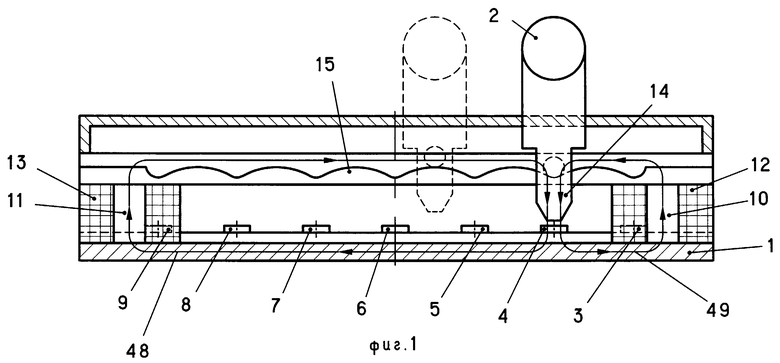
На фиг.1 схематично изображен общий вид предлагаемого контроллера крана машиниста. На фиг.2 схематично изображена электрическая схема предлагаемого контроллера крана машиниста.
Контроллер крана машиниста (фиг.1) содержит корпус 1, рукоятку 2 управления с положениями тормозных позиций: сверхзарядки, поездной, перекрыши без питания, перекрыши с питанием, замедленного служебного торможения, служебного торможения, экстренного торможения. Все положения рукоятки 2 управления фиксированные, кроме положения сверхзарядки, которое выполнено с самовозвратом в поездное положение.
Контроллер крана машиниста содержит размещенные на корпусе 1 органы 3, 4, 5, 6, 7, 8, 9 передачи электрического управляющего сигнала от источника питания (на чертежах не изображен) к управляющим электропневматическим органам (на чертежах не изображены) крана машиниста соответствующих тормозных позиций: сверхзарядки, поездной, перекрыши без питания, перекрыши с питанием, замедленного служебного торможения, служебного торможения, экстренного торможения. В контроллере крана машиниста имеется устройство включения органов 3, 4, 5, 6, 7, 8, 9 передачи электрического управляющего сигнала, которое выполнено в виде Ш-образного магнитопровода. Этот магнитопровод состоит из внешних неподвижных сердечников 10, 11, катушек 12, 13 подмагничивания, которые размещены на корпусе 1 контроллера.
Корпус 1 является основанием Ш-образного магнитопровода. Центральный сердечник Ш-образного магнитопровода выполнен в форме магнитного концентратора 14, связанного с рукояткой 2 управления и перемещающегося с ней от одной тормозной позиции к другой, то есть от одного органа передачи электрического управляющего сигнала к другому органу передачи электрического управляющего сигнала с зазором над ними. При этом магнитный концентратор 14 перемещается по направляющей 15. Траектория перемещения установлена таковой, что зазор магнитного концентратора 14 над органами 3, 4, 5, 6, 7, 8, 9 передачи электрического управляющего сигнала меньше зазора магнитного концентратора 14 над корпусом 1, являющимся основанием Ш-образного магнитопровода.
Органы 3, 4, 5, 6, 7, 8, 9 передачи электрического управляющего сигнала располагаются на основании магнитопровода (корпусе 1) через равные интервалы в положениях, соответствующих тормозным позициям рукоятки 2 управления. Катушки 12, 13 подмагничивания подключены к источнику питания (на чертежах не изображен) последовательно со стабилитроном 16 (фиг.2). Каждый орган соответственно 3, 4, 5, 6, 7, 8, 9 передачи электрического управляющего сигнала от источника питания к управляющим электропневматическим органам (на чертежах не показан) крана машиниста содержит магнитоуправляемую микросхему 17, установленную на корпусе 1 и включающую в себя датчик Холла, усилитель и триггер. Каждый орган соответственно 3, 4, 5, 6, 7, 8, 9 содержит триггер 18 RS типа с перекрестными связями, имеющий вход 19 S, вход 20 R, выход 21 Q, выход 22 Q. А также содержит диод 23, элемент 24 задержки времени распространения электрического сигнала, который имеет резистор 25 и конденсатор 26. Магнитоуправляемая микросхема 17 имеет выход 27 своего триггера (на чертеже не показан). Каждый орган 3, 4, 5, 6, 7, 8, 9 имеет также резистор 28. Контроллер крана машиниста снабжен органом 29 предварительной установки триггеров 18 RS типа. Орган 29 имеет последовательно включенные стабилитрон 30 и резистор 31, к общей точке 32 которых подключены последовательно включенные логический элемент 33 НЕ и логический элемент 34 НЕ. Логический элемент 33 НЕ имеет вход 35, а логический элемент 34 НЕ имеет выход 36, который через диод 37, включенный в обратном направлении, соединен с входом 19 S триггера 18 RS типа всех органов 3, 4, 5, 6, 7, 8, 9 передачи электрического управляющего сигнала. Орган 29 имеет резистор 38.
Напряжение от источника питания (на чертеже не показан) подводится к клемме 39. Стабилизированное напряжение прикладывается к клеммам 40. Каждый орган 3, 4, 5, 6, 7, 8, 9 передачи электрического управляющего сигнала от источника питания к управляющему электропневматическому органу крана машиниста связан с этим органом (на чертеже не показан) электрической цепью соответственно 41, 42, 43, 44, 45, 46, 47.
Когда к катушкам 12, 13 подмагничивания подводится электрический ток, магнитные потоки 48, 49 катушек подмагничивания складываются в магнитном концентраторе 14. При его линейном перемещении вдоль магнитопровода величина индукции остается постоянной. Величина индукции выбирается достаточной для срабатывания магнитоуправляемой микросхемы органов передачи электрического управляющего сигнала, когда магнитный концентратор 14 расположен над геометрическим центром магнитоуправляемой микросхемы. При этом траектория движения магнитного концентратора 14 над основанием магнитопровода выбрана с учетом того, что при нахождении магнитного концентратора 14 над геометрическим центром магнитоуправляемой микросхемы 17 величина зазора между ними обеспечивает ее срабатывание, а при движении магнитного концентратора 14 от магнитоуправляемой микросхемы одного органа передачи электрического управляющего сигнала до магнитоуправляемой микросхемы следующего органа передачи электрического управляющего сигнала величина зазора между магнитным концентратором 14 и основанием магнитопровода исключает возможность срабатывания магнитоуправляемой микросхемы.
Контроллер крана машиниста тормозного железнодорожного транспортного средства действует следующим образом.
При подаче питания на контроллер от источника питания через катушки 12, 13 подмагничивания и стабилитрон 16 начинает протекать электрический ток, создающий в катушках магнитное поле и стабилизированное напряжение питания на клеммах 40. Это стабилизированное напряжение прикладывается к стабилитрону 30 и резистору 31 органа 29 предварительной установки триггеров 18 RS типа. На входе 35 логического элемента 33 НЕ в первоначальный момент образуется потенциал, равный нулю, а затем при пробое стабилитрона 30 на входе 35 логического элемента 33 НЕ образуется потенциал, равный единице. Тогда на выходе 36 логического элемента 34 НЕ будет такая же последовательность потенциалов. Точно такая же последовательность потенциалов через диод 37 приложится к входу 19 S триггера 18 RS типа органов передачи электрического управляющего сигнала от источника питания к управляющему электропневматическому органу крана машиниста всех органов 3, 4, 5, 6, 7, 8, 9 во всех тормозных позициях. Таким образом, на входах 19 и 20 S и R триггера 18 RS типа установится потенциал, равный единице. Произойдет предварительная установка (предустановка) всех триггеров 18 RS типа в исходное состояние, и на выходе 21 Q всех этих триггеров RS типа установится потенциал, равный единице, а на выходе 22 Q всех триггеров 18 RS типа установятся потенциалы, равные нулю. При этом магнитный концентратор 14, связанный с рукояткой 2 управления, находится между магнитоуправляемыми микросхемами 17 органов 3, 4, 5, 6, 7, 7, 8, 9 передачи электрического сигнала от источника питания к управляющему электропневматическому органу крана машиниста.
Для включения в действие тормоза железнодорожного транспортного средства, например пассажирского поезда с локомотивной тягой, оборудованного электропневматическим тормозом, рукоятку 2 управления с магнитным концентратором 14 устанавливают во вторую тормозную позицию - поездную позицию. Магнитный концентратор 14 располагается над геометрическим центром магнитоуправляемой микросхемы 17 органа 4 передачи электрического сигнала, размещенного в поездной позиции. Магнитоуправляемая микросхема 17 срабатывает. На выходе 27 этой магнитоуправляемой микросхемы появляется потенциал, равный нулю. На входе 19 S триггера 18 RS типа органов 3, 4, 5, 6, 7, 8, 9 передачи электрического управляющего сигнала всех тормозных позиций через диод 23 также появляется потенциал, равный нулю. На входе 20 R триггера 18 RS типа органа 4 передачи электрического управляющего сигнала, размещенного в поездной позиции, появляется потенциал, равный нулю. Потенциал на выходе 21 Q триггера 18 RS типа органов 3, 5, 6, 7, 8, 9 передачи электрического управляющего сигнала, находящихся в неработающих тормозных позициях, остается равным единице. На выходе 22 Q триггера 18 RS типа органа 4 передачи электрического управляющего сигнала поездной позиции появляется потенциал, равный единице, а на его выходе 21 Q появляется потенциал, равный нулю. В поездной позиции от органа 4 передачи электрического управляющего сигнала по электрической цепи 42 потечет электрический ток к соответствующему электропневматическому органу крана машиниста, то есть будет осуществляться передача электрического управляющего сигнала в этой позиции. Выход 22 Q триггера 18 RS типа всех органов 3, 5, 6, 7, 8, 9 передачи электрического управляющего сигнала, находящихся в неработающих тормозных позициях, будет иметь потенциал, равный нулю. Подача электрического управляющего сигнала в этих тормозных позициях не происходит.
При перемещении магнитного концентратора 14 в следующую тормозную позицию, то есть от предыдущей магнитоуправляемой микросхемы до последующей магнитоуправляемой микросхемы и до момента установки магнитного концентратора 14 над геометрической осью последующей магнитоуправляемой микросхемы и ее срабатывания на входе 20 R триггера 18 RS типа предыдущего органа передачи электрического управляющего сигнала сохраняется потенциал, равный нулю. Это происходит потому, что между выходом 27 магнитоуправляемой микросхемы 17 и входом R триггера 18 RS типа включен элемент 24 задержки времени распространения электрического управляющего сигнала, состоящий из резистора 25 и конденсатора 26. Постоянная времени этого элемента 24 выбрана равной сумме времени прохождения магнитного концентратора 14 от предыдущей до последующей тормозной позиции и времени включения в действие последующей магнитоуправляемой микросхемы. Таким образом, конденсатор 26, подключенный непосредственно к входу 20 R триггера 18 RS типа, сохраняет на входе 20 R потенциал, равный нулю, тем самым сохраняя на выходе 22 Q триггера 18 RS типа потенциал, равный единице на время, пока с последующей тормозной позиции не начнет поступать электрический управляющий сигнал на соответствующий управляющий электропневматический орган крана машиниста.
Если железнодорожное транспортное средство оборудовано электропневматическим тормозом, то при постановке рукоятки 2 управления в требуемую тормозную позицию электрический управляющий сигнал одновременно с подачей его на электропневматические управляющие органы крана машиниста подается и на электромагнитные вентили электропневматического тормоза (на чертеже не изображены).
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН МАШИНИСТА ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2444454C1 |
| КРАН МАШИНИСТА ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2631126C2 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗОМ ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2614468C2 |
| КРАН МАШИНИСТА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2329167C1 |
| Кран вспомогательного тормоза тягового подвижного состава | 2023 |
|
RU2811622C1 |
| СПОСОБ ТОРМОЖЕНИЯ ЛОКОМОТИВА И КРАН ВСПОМОГАТЕЛЬНОГО ТОРМОЗА ЛОКОМОТИВА | 2010 |
|
RU2444453C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ТОРМОЗОМ | 2010 |
|
RU2428333C1 |
| Кран машиниста локомотива системы Белавина | 1985 |
|
SU1303463A1 |
| Кран машиниста железнодорожного транспортного средства | 1986 |
|
SU1382700A1 |
| ЭЛЕКТРИЧЕСКАЯ СХЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ КРАНОМ МАШИНИСТА С ИСТОЧНЙКО;л ПИТАНИЯ | 1973 |
|
SU382534A1 |
Контроллер крана машиниста относится к области железнодорожного транспорта и предназначен для дистанционного управления краном машиниста путем подачи электрических управляющих сигналов на электропневматические управляющие органы крана машиниста. Каждый орган передачи электрического управляющего сигнала имеет магнитоуправляемую микросхему, элемент задержки времени распространения электрического управляющего сигнала, триггер RS типа с перекрестными связями, диод, резистор. Выход микросхемы соединен с входом R и с входом S через диод триггера. Входы S триггеров всех органов соединены между собой. Устройство включения органов передачи электрического управляющего сигнала от источника питания к управляющему электропневматическому органу крана машиниста выполнено в виде Ш-образного магнитопровода. На внешних неподвижных сердечниках расположены катушки подмагничивания. Центральный сердечник выполнен в форме магнитного концентратора. Корпус является основанием магнитопровода. Магнитный концентратор связан с рукояткой и перемещается над органами передачи электрического управляющего сигнала и основанием магнитопровода. Зазор между магнитным концентратором и геометрическими центрами магнитоуправляемых микросхем меньше зазора между концентратором и основанием магнитопровода. Катушки подключены к источнику питания последовательно со стабилитроном. Орган предварительной установки триггеров RS типа параллельно подключен к указанным триггерам RS типа и имеет стабилитрон, резистор. К их общей точке подключены последовательно включенные логические элементы НЕ. Выход логического элемента НЕ соединен с входом S всех триггеров RS типа через диод 37. Стабилизированное напряжение прикладывается к клеммам. Выход Q каждого триггера RS типа соединен с электрической цепью соответственно. Указанные цепи связаны с управляющими электропневматическими органами крана машиниста. Достигаемый технический результат заключается в исключении возможности нарушения процесса передачи электрического управляющего сигнала на управляющий электропневматический орган крана машиниста в каждой тормозной позиции, в обеспечении подачи электрического управляющего сигнала на соответствующий управляющий электропневматический орган крана машиниста в каждой предыдущей тормозной позиции до момента начала подачи электрического управляющего сигнала в последующей тормозной позиции. 2 з.п. ф-лы. 2 ил.
| Кран машиниста тормозов железнодорожного транспортного средства | 1977 |
|
SU737271A1 |
