Изобретение относится к машине для обработки пути, содержащей опертую на ходовые механизмы, содержащую рабочий и путеподъемный агрегаты, раму машины, причем путеподъемный агрегат оборудован соединенной с рамой машины с возможностью перемещения по высоте посредством подъемных приводов инструментальной рамой, на которой на каждый рельс пути установлены две дистанцированные друг от друга вдоль рельса пары подъемных роликов, выполненных с возможностью схождения поперек пути посредством привода поперечного перемещения, а также ролик с гребнем, предназначенный для обкатывания по поверхности катания рельса.
Действующие наподобие клещей пары подъемных роликов находятся при этом в соединении с геометрическим замыканием с головкой рельса и обкатываются по ее нижней стороне, в результате чего возможно непрерывное продвижение машины при ее эксплуатации. При возникновении препятствий или при очень неравномерных формах рельсов обе лежащие друг за другом пары подъемных роликов последовательно раскрываются, а после прохождения проблемного места снова смыкаются, что без перебоев обеспечивает непрерывный захват рельса, по меньшей мере, одной парой роликов.
В описанной в US 4893565 шпалоподбивочной машине захватные органы выполнены перемещаемыми по высоте с помощью привода, за счет чего создается возможность приводить в контакт захватные крюки с головкой рельса или на выбор также с подошвой рельса.
Задача настоящего изобретения состоит в создании родовой машины, с помощью которой имеющие изменения сечения отрезки рельса можно было бы преодолеть легче и надежнее.
Эта задача решается согласно изобретению посредством машины описанного выше рода за счет того, что каждая пара подъемных роликов выполнена по отношению к инструментальной раме с возможностью независимого перемещения по высоте по отношению к инструментальной раме посредством привода перемещения по высоте и что с дистанцированием друг от друга обоих лежащих рядом друг с другом поперек пути подъемных роликов связано автоматическое нагружение привода перемещения по высоте для опускания обоих подъемных роликов по отношению к инструментальной раме.
Выполненный таким образом путеподъемный агрегат дает то преимущество, что временно дистанцированные друг от друга для переезда через препятствие на рельсе или при изменении сечения рельса подъемные ролики одной пары после прохождения этого места могут надежно и без проблем снова смыкаться или сходиться. Это имеет значение, в частности, в случае большего подъема рельсошпальной решетки, поскольку при этом во время раскрытия выполненных за счет пар подъемных роликов клещей неизбежно происходит оседание рельсошпальной решетки и тем самым изменение эпюры прогиба рельсов. Это вертикальное смещение пути или захватываемых рельсов компенсируется автоматическим опусканием подъемных роликов простым и максимально надежным образом, так что подъемные ролики сразу же снова находятся в нужном положении по отношению к головке рельса. Поскольку благодаря автоматическому протеканию этого движения перемещения уделять особое внимание этому со стороны машиниста не требуется, можно избежать также отвлечения внимания и за счет этого возможного нарушения безопасности при эксплуатации.
Усовершенствование по п.2 способствует в этой связи тому, что после схождения пар подъемных роликов рельсошпальная решетка автоматически снова поднимается в прежде занимаемое положение, с тем чтобы гарантировать бесперебойную работу машины.
Дополнительные преимущества согласно изобретению приведены в других зависимых пунктах и в описании.
Изобретение более подробно описано ниже в помощью предпочтительного примера выполнения, изображенного на чертежах, на которых представляют:
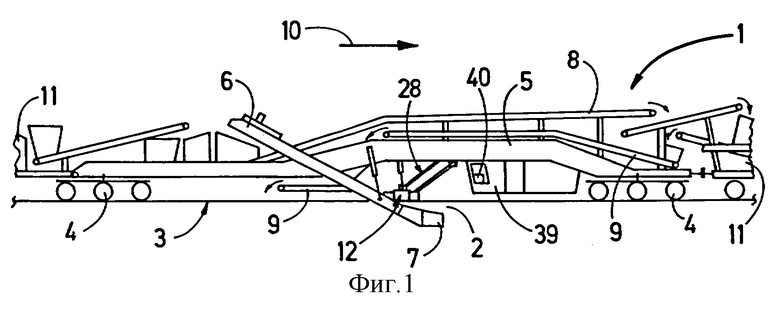
- фиг.1: схематичный вид сбоку выполненной согласно изобретению машины для обработки пути с путеподъемным агрегатом;
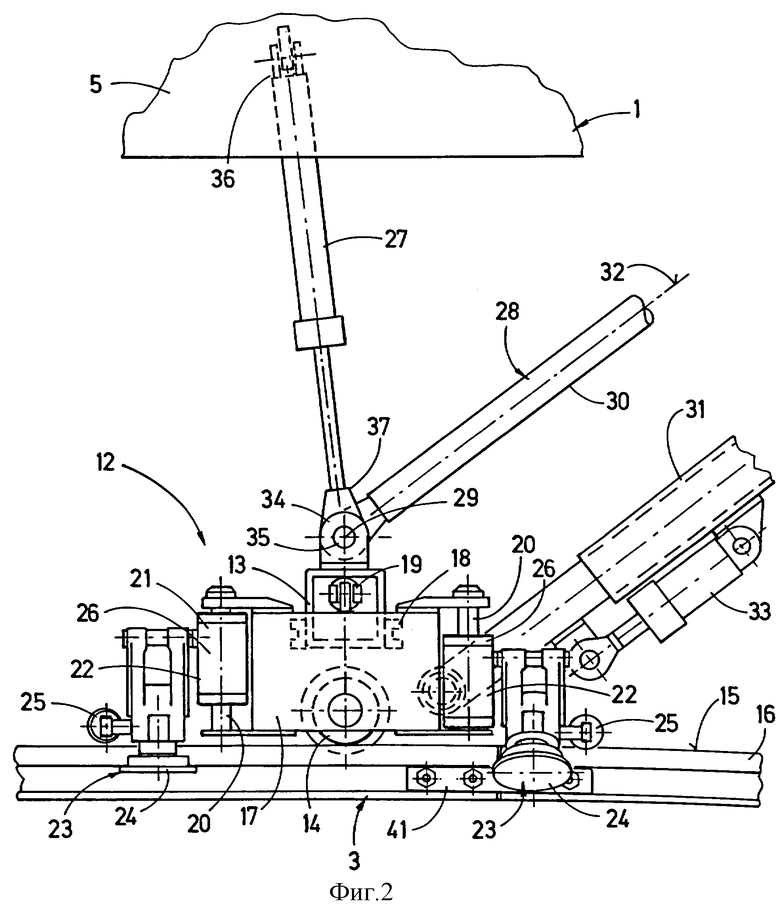
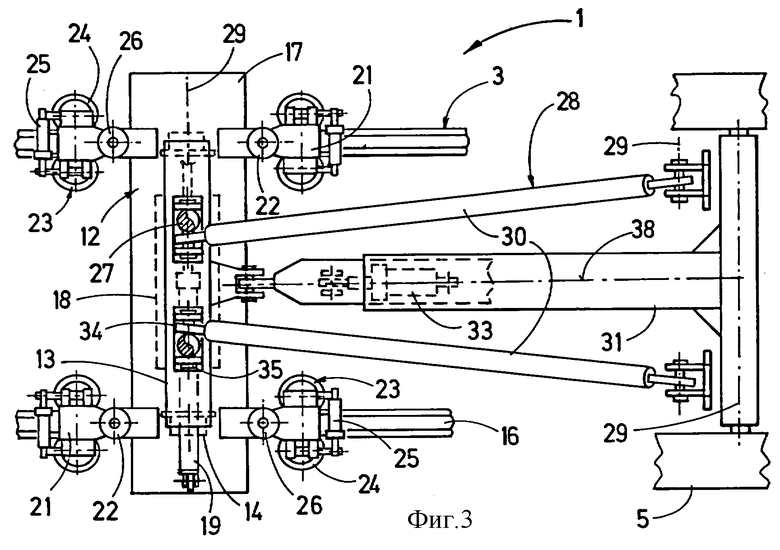
- фиг.2 и 3: соответственно увеличенный вид сбоку и вид сверху на путеподъемный агрегат;
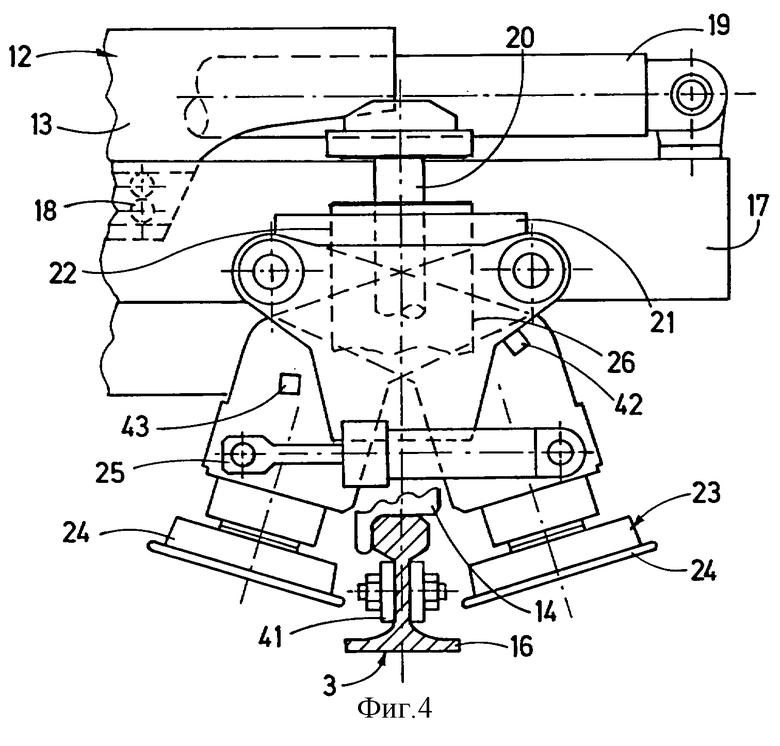
- фиг.4: вид путеподъемного агрегата вдоль пути.
Изображенная на фиг.1 машина 1 предназначена для обработки щебеночного балласта 2 пути 3 и содержит опертую на ходовые механизмы 4 раму 5. На ней установлен путеподъемный агрегат 6 в виде вращающейся, пропущенной под путем 3 цепи 7 для выемки щебеночного балласта 2. С выемочной цепью 7 взаимодействуют ленточные транспортеры 8 для удаления щебня. Дополнительные ленточные транспортеры 9 предназначены для повторной укладки очищенного или нового щебня на место, лежащее в направлении движения машины 1 позади выемочной цепи 7. Направление движения обозначено стрелкой 10. На обоих концах рамы 5 с машиной 1 соединены дополнительные машины 11 (подробно не показаны).
В зоне выемочной цепи 7 на раме 5 закреплен путеподъемный агрегат 12, конструкция которого более подробно поясняется ниже также с помощью фиг.2-4. Путеподъемный агрегат 12 содержит инструментальную раму 13, проходящую приблизительно горизонтально поперек пути. На инструментальной раме 13 установлена опора 17 скольжения, которая выполнена с возможностью перемещения поперек пути относительно инструментальной рамы 13 посредством поперечной направляющей 18 и соединена для этой цели с приводом 19 перемещения. Путеподъемный агрегат 12 в рабочем положении (не показано) прилегает с помощью роликов 14 с гребнем к поверхностям катания 15 рельсов 16 пути 3 или обкатывается по ним.
В зоне каждого рельса 16 опора 17 скольжения содержит по две дистанцированные друг от друга вдоль машины вертикальные направляющие стойки 20, на которых с возможностью гидравлического перемещения по высоте установлен выполненный в виде гидроцилиндра 22 роликодержатель 21. (В качестве альтернативной формы выполнения возможно, чтобы направляющая стойка 20 была образована поршнем гидроцилиндра 22, который был бы тогда соединен непосредственно с опорой 17 скольжения). На каждом перемещаемом по высоте роликодержателе 21 закреплено по два образующих одну пару 23 подъемных ролика 24, выполненных с возможностью схождения поперек пути посредством привода 25 поперечного перемещения. Таким образом, на опоре 17 скольжения на каждый рельс 16 пути 3 расположено две дистанцированные друг от друга вдоль рельса пары 23 подъемных роликов 24, прижимаемых к рельсу с геометрическим замыканием, причем эти пары 23 выполнены с возможностью перемещения по высоте независимо друг от друга по отношению к инструментальной раме 13 посредством образованного гидроцилиндром 22 привода 26 перемещения по высоте.
В рабочей кабине 39 размещено устройство 40 управления (фиг.1), связанное с приводами 25 поперечного перемещения и приводами 26 перемещения по высоте подъемных роликов 24. Как более подробно описано ниже, этими приводами 25, 26 управляют таким образом, что с дистанцированием друг от друга обоих лежащих рядом друг с другом подъемных роликов 24 одной пары 23 связано автоматическое нагружение соответствующего привода 26 перемещения по высоте, с тем чтобы опустить подъемные ролики 24 по отношению к инструментальной раме 13.
Путеподъемный агрегат 12 или инструментальная рама 13 соединены с рамой 5 машины с возможностью перемещения по высоте посредством двух проходящих параллельно друг другу и приблизительно вертикально дистанцированных друг от друга поперек пути подъемных приводов 27. Дополнительно инструментальная рама 13 сочленена с рамой 5 машины с возможностью поворота посредством сочленения 28 вокруг проходящих поперек пути горизонтальных осей 29 поворота. Это при виде сбоку приблизительно параллелограммообразное сочленение 28 состоит из двух колейных тяг 30 и одной выполненной в виде дышла или Т-образно буксирной тяги 31. Обе дистанцированные друг от друга поперек пути колейные тяги 30 проходят в общей плоскости 32, тогда как буксирная тяга 31 проходит параллельно этой плоскости 32, однако на удалении от нее и под ней. Буксирная тяга 31 выполнена с возможностью телескопического удлинения и снабжена приводом 33 для регулирования по длине.
Колейные тяги 30 шарнирно закреплены на верхней стороне инструментальной рамы 13 соответственно в месте 34 сочленения, которое образовано ориентированным поперек пути и служащим в качестве оси 29 поворота валом 35. Подъемные приводы 37, установленные своим верхним концом 36 на раме 5 машины, своим нижним концом 37 также шарнирно закреплены соответственно на горизонтальном валу 35 непосредственно рядом с колейной тягой 30. Как видно из фиг.3, обе колейные тяги 30 расположены зеркально-симметрично относительно продольной плоскости 38 симметрии машины 1 и под острым углом друг к другу.
Во время эксплуатации машины 1 для обработки щебеночного балласта 2 путеподъемный агрегат 12 посредством подъемных приводов 27 опускают и посредством роликов 14 с гребнем опирают на рельсы 16 пути 3. Затем пары 23 подъемных роликов 24 приводят в контакт с геометрическим замыканием с рельсами 16 посредством приводов 25 поперечного перемещения или также приводов 26 перемещения по высоте, после чего путь 3 может быть приподнят за счет повторного нагружения подъемных приводов 27, с тем чтобы создать под путем нужное рабочее пространство для использования рабочего агрегата 6 или выемочной цепи 7.
Для создания контакта с геометрическим замыканием между подъемными роликами 24 и рельсами 16 привод 33 регулирования по длине телескопической буксирной тяги 31 включен без давления или находится в плавающем положении, с тем чтобы обеспечить подгонку путеподъемного агрегата 12 к продольному положению пути. Инструментальная рама 13 может при этом вращаться вокруг образованной валом 35 оси 29 поворота (фиг.2), поскольку как колейные тяги 30, так и нижние концы 37 подъемных приводов 27 сочленены с валом 35 по одной оси. После подгонки положения вдоль пути или прижатия подъемных роликов 24 к рельсам 16 привод 33 регулирования по длине буксирной тяги 31 блокируют, с тем чтобы стабилизировать путеподъемный агрегат 12 вдоль пути и удерживать его в этом положении.
Когда непрерывно обкатывающийся по пути 3 во время эксплуатации путеподъемный агрегат 12 наталкивается на препятствие, изображенное на фиг.2 и 4, например, в виде накладки 41, то для его преодоления требуется кратковременно дистанцировать друг от друга подъемные ролики 24 поперек пути, а после прохождения препятствия снова сомкнуть их. Подъемные ролики 24 каждой пары 23 при регулярной эксплуатации сжаты с определенным усилием. Как только это усилие из-за наезда на препятствие принудительным образом повысится, устройство 40 управления автоматически вызовет расхождение обоих подъемных роликов 24 соответствующей пары 23 посредством привода 25 поперечного перемещения. По достижении максимально раскрытого положения пары подъемных роликов срабатывает упор 42 (фиг.4), который вызывает нагружение привода 26 перемещения по высоте для опускания подъемных роликов 24.
Далее устройство 40 управления, например, с помощью реле времени в связи со скоростью движения машины 1 вызывает то, что подъемные ролики 24 после прохождения проблемного места на пути 3 автоматически опять сходятся для повторного захвата рельса 16.
За счет связанного с расхождением подъемных роликов 24 опускания обеспечивается, следовательно, то, что рельс 16 после переезда через накладку 41 сразу же и без потери времени опять может быть надежно захвачен в результате схождения раскрытой пары 23 подъемных роликов 24. Для надежности следующая, (вторая) пара 23 подъемных роликов 24 может быть раскрыта только тогда, когда прежде была сомкнута передняя пара.
При схождении подъемных роликов 24 посредством привода 25 поперечного перемещения срабатывает дополнительный упор 43 (фиг.4). Он вызывает через устройство 40 управления то, что с нагружением привода 25 поперечного перемещения для прижатия обоих подъемных роликов 24 опущенной пары 23 к рельсу 16 позади препятствия происходит также нагружение соответствующего привода 26 перемещения по высоте, с тем чтобы оба подъемных ролика 24 и тем самым путь 3 опять поднять в первоначальное положение относительно инструментальной рамы 13 и обеспечить бесперебойное продолжение непрерывной эксплуатации машины 1.
Изобретение относится к машинам для обработки пути. Машина (1) для обработки пути (3) содержит опертую на ходовые механизмы раму (5) машины с путеподъемным агрегатом (12), который выполнен с возможностью перемещения по высоте посредством подъемных приводов (27), и инструментальную раму (13), на которой для каждого рельса (16) пути (3) установлены две дистанцированные друг от друга вдоль рельса пары (23) подъемных роликов (24), выполненных с возможностью схождения поперек пути посредством привода (25) поперечного перемещения, а также ролик (14) с гребнем, предназначенный для обкатывания по поверхности (15) катания рельса (16). Каждая пара (23) подъемных роликов (24) выполнена с возможностью независимого перемещения по высоте по отношению к инструментальной раме (13) посредством привода (26) перемещения по высоте. Предусмотрено автоматическое нагружение привода (26) перемещения по высоте при опускании обоих подъемных роликов (24) по отношению к инструментальной раме (13) с дистанцированием друг от друга обоих лежащих рядом друг с другом поперек пути подъемных роликов (24). 10 з.п.ф-лы, 4 ил.
| US 4893565 A , 16.01.1990 | |||
| US 5613442 A , 25.03.1997 | |||
| НЕПРЕРЫВНО ПЕРЕМЕЩАЮЩАЯСЯ МАШИНА ДЛЯ УПЛОТНЕНИЯ ЩЕБЕНОЧНОГО БАЛЛАСТА ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1991 |
|
RU2039142C1 |

