Изобретение относится к области кузнечно-прессового производства, а именно к способу управления пульсаторным гидроприводом радиально-ковочной машины и конструкции радиально-ковочной машины для осуществления способа.
Известен способ управления пульсаторным гидроприводом радиально-ковочной машины с приводом бойков посредством гидроцилиндров при работе машины в процессе ковки, включающий попеременные подачу и отвод рабочей жидкости в противофазе в полости рабочего и обратного ходов гидроцилиндров, при этом в полости рабочего хода гидроцилиндров жидкость подается посредством плунжерных насосов-пульсаторов, а в полости обратного хода - от пневмогидравлического аккумулятора [1].
При указанном способе управления пульсаторным гидроприводом на всем протяжении процесса сведения бойков часть усилия, развиваемого от давления рабочей жидкости в полости рабочего хода каждого из гидроцилиндров привода бойков, расходуется на преодоление противоположно направленного усилия, создаваемого от давления жидкости в полости обратного хода соответствующего гидроцилиндра. В дополнение к этому по мере сведения бойков из-за вытеснения жидкости из полости обратного хода гидроцилиндра в жидкостную полость пневмогидравлического аккумулятора происходит сжатие газа в газовой полости последнего, сопровождающееся ростом его давления, а следовательно, и давления в полости обратного хода, то есть ростом усилия, препятствующего сведению бойков. В результате потенциальные возможности машины по созданию максимального ковочного усилия, используемого для деформации заготовки (поковки), при установленном значении максимально допустимого давления в полостях рабочего хода гидроцилиндров не могут быть реализованы в полной мере, а процесс деформации заготовки происходит с пониженным значением коэффициента полезного действия (КПД) машины по усилию, что является недостатками рассматриваемого способа.
Следует отметить, что данные недостатки известного способа управления пульсаторным гидроприводом являются особенно ощутимыми для радиально-ковочных машин с большим номинальным усилием, у которых бойки закрепляются на поворотных рычагах, а создание усилия деформации осуществляется с помощью главных гидроцилиндров с полостью рабочего хода, неподвижно установленных на станине машины. Выходное звено каждого из главных гидроцилиндров взаимодействует с поворотным рычагом, на котором закреплен боек, через гидростатическую опору, и, чтобы не произошло раскрытие стыка между этой опорой и ответной поверхностью рычага, с помощью специальных гидроцилиндров обратного хода (с полостью обратного хода) создается значительное усилие, прижимающее поворотный рычаг к гидростатической опоре и препятствующее сведению бойков.
Рассматриваемый способ управления пульсаторным гидроприводом радиально-ковочной машины не предусматривает возможность остановки бойков (например, для контроля их состояния, исключения непроизводительных затрат энергии в паузы между ковками и т.п.) без остановки приводящего электродвигателя насосов-пульсаторов или размыкания силовой цепи привода указанных насосов, что также является его недостатком (особенно для радиально-ковочных машин с большим номинальным усилием), поскольку: во-первых, пуск насосов-пульсаторов, а тем более полностью их привода является энергоемким процессом, и, во-вторых, увеличение количества пусков и остановов агрегатов приводит к уменьшению их срока службы.
Известна радиально-ковочная машина, содержащая станину и бойки, каждый из которых снабжен приводом в виде гидроцилиндров, полости рабочего хода которых соединены с рабочими камерами соответствующих плунжерных насосов-пульсаторов, а полости обратного хода - с жидкостной полостью пневмогидравлического аккумулятора [1].
Недостатками известной конструкции, предназначенной для осуществления описанного выше способа, также являются, во-первых, то, что потенциальные возможности машины по созданию максимального ковочного усилия, используемого для деформации заготовки (поковки), при установленном значении максимально допустимого давления в полостях рабочего хода гидроцилиндров не могут быть реализованы в полной мере, а во-вторых, то, что процесс деформации заготовки происходит с пониженным значением КПД машины по усилию.
Эти недостатки, как и в описанном способе управления пульсаторным гидроприводом, используемом при работе данной радиально-ковочной машины, обусловлены тем, что при сведении бойков и деформации заготовки (поковки), наряду с полезной нагрузкой, обусловленной деформацией заготовки (поковки), приходится преодолевать все время увеличивающуюся по мере сжатия газа в пневмогидравлическом аккумуляторе силу сопротивления, создаваемую давлением жидкости в полостях обратного хода гидроцилиндров.
Рассматриваемая радиально-ковочная машина не содержит в своем составе устройств, обеспечивающих возможность остановки бойков без остановки приводящего электродвигателя насосов-пульсаторов или размыкания силовой цепи привода указанных насосов. В силу этого при ее эксплуатации возникает необходимость в повышенном количестве пусков и остановов, по крайней мере, насосов-пульсаторов, что приводит к дополнительным затратам энергии и отрицательно сказывается на ресурсе как насосов-пульсаторов, так и всех элементов их привода, включая приводящий электродвигатель, снижая эффективность машины в целом.
Наиболее близким к заявляемому техническому решению является принятый в качестве прототипа способ управления пульсаторным гидроприводом радиально-ковочной машины с приводом бойков посредством гидроцилиндров при работе машины в режиме ковки, включающий попеременные подачу и отвод рабочей жидкости в противофазе в полости рабочего и обратного ходов гидроцилиндров, осуществляемые посредством плунжерных насосов-пульсаторов [2].
В данном способе не оговаривается, по какому закону должно меняться давление рабочей жидкости в полостях обратного хода гидроцилиндров. Фактически же из-за наличия неизбежного в процессе изготовления и эксплуатации оборудования отклонения значений геометрических размеров [в частности, эффективных площадей плунжеров насосов-пульсаторов и плунжеров (поршней) гидроцилиндров со стороны полостей рабочего и обратного ходов] от их номинальных значений, а также утечек рабочей жидкости давление в полостях обратного хода гидроцилиндров в процессе работы машины может изменяться неуправляемым образом.
Так, если в процессе изготовления получено, что отношение изменения объема полости обратного хода к соответствующему изменению объема полости рабочего хода гидроцилиндров больше, чем отношение изменения объема рабочей камеры насоса-пульсатора, соединенной с полостью обратного хода, к соответствующему изменению объема рабочей камеры насоса-пульсатора, соединенной с полостью рабочего хода, то при управлении пульсаторным гидроприводом в соответствии с рассматриваемым способом в процессе сведения бойков будет происходить увеличение давления в полости обратного хода гидроцилиндра и, соответственно, увеличение усилия сопротивления, которое при деформировании заготовки (поковки) необходимо преодолевать наряду с полезной нагрузкой, связанной с сопротивлением материала заготовки (поковки).
В итоге, потенциальные возможности машины по созданию максимального ковочного усилия, используемого для деформации заготовки (поковки), при установленном значении максимально допустимого давления в полостях рабочего хода гидроцилиндров не реализуются в полной мере, а процесс деформации заготовки происходит с пониженным значением КПД машины по усилию, что является недостатками рассматриваемого способа.
Кроме того, в рассматриваемом случае при разведении бойков возможно нарушение сплошности рабочей жидкости в рабочих камерах насосов-пульсаторов, соединенных с соответствующими полостями рабочего хода гидроцилиндров, что отрицательно сказывается на функционировании гидропривода и машины в целом.
При использовании известного способа не гарантируется обеспечение на протяжении той части рабочего цикла машины, когда не происходит деформации заготовки (поковки), некоторого минимально необходимого давления в полостях обратного хода, что недопустимо для радиально-ковочных машин с большим номинальным усилием, у которых бойки закрепляются на поворотных рычагах, а создание усилия деформации осуществляется с помощью главных гидроцилиндров, неподвижно установленных на станине машины, так как недостаточное давление в полости обратного хода может привести к раскрытию стыка между гидростатической опорой, через которую выходное звено каждого из главных гидроцилиндров взаимодействует с поворотным рычагом, и ответной поверхностью рычага.
Данный способ управления пульсаторным гидроприводом радиально-ковочной машины также не предусматривает возможность остановки бойков без остановки приводящего электродвигателя насосов-пульсаторов или размыкания силовой цепи привода указанных насосов. В силу этого при его использовании возникает необходимость в повышенном количестве пусков и остановов (связанных с остановками бойков), по крайней мере, насосов-пульсаторов, что влечет за собой дополнительные затраты энергии и снижение ресурса как насосов-пульсаторов, так и всех элементов их привода, включая приводящий электродвигатель.
Наиболее близкой по технической сущности к заявляемой радиально-ковочной машине является принятая в качестве прототипа радиально-ковочная машина для осуществления способа, описанного выше. Машина содержит станину и бойки, каждый из которых снабжен приводом в виде гидроцилиндров, полости рабочего и обратного ходов которых соединены с рабочими камерами соответствующих плунжерных насосов-пульсаторов, при этом к гидролинии между полостью обратного хода гидроцилиндра и рабочей камерой соответствующего насоса-пульсатора присоединен своим исполнительным каналом гидравлический распределитель, соединенный своим напорным каналом с гидравлическим источником питания, а выходным каналом - со сливом [2]. Гидравлический распределитель в известной радиально-ковочной машине выполнен с механическим управлением от привода насосов-пульсаторов машины и предназначен для регулирования положения бойков (а в итоге - ковочного размера) в период холостых ходов.
Возвратно-поступательное движение бойков в радиально-ковочной машине осуществляется в такт движению поршней гидроцилиндров, которое совершается, в свою очередь, в такт движению плунжеров насосов-пульсаторов за счет того, что рабочая жидкость перетекает из рабочей камеры насоса пульсатора в соединенную с ней полость гидроцилиндра и обратно в противофазе для полостей рабочего и обратного ходов.
При этом из-за наличия неизбежного в процессе изготовления и эксплуатации оборудования отклонения значений геометрических размеров [в частности, эффективных площадей плунжеров насосов-пульсаторов и плунжеров (поршней) гидроцилиндров со стороны полостей рабочего и обратного ходов] от их номинальных значений, а также утечек рабочей жидкости давление в полостях обратного хода гидроцилиндров в процессе работы машины может изменяться неуправляемым образом.
Так, если в процессе изготовления получено, что отношение изменения объема полости обратного хода к соответствующему изменению объема полости рабочего хода гидроцилиндров больше, чем отношение изменения объема рабочей камеры насоса-пульсатора, соединенной с полостью обратного хода, к соответствующему изменению объема рабочей камеры насоса-пульсатора, соединенной с полостью рабочего хода, то в процессе сведения бойков будет происходить увеличение давления в полости обратного хода гидроцилиндра и, соответственно, увеличение усилия сопротивления, которое при деформировании заготовки (поковки) необходимо преодолевать наряду с полезной нагрузкой, связанной с сопротивлением материала заготовки.
Таким образом, потенциальные возможности машины по созданию максимального ковочного усилия, используемого для деформации заготовки (поковки), при установленном значении максимально допустимого давления в полостях рабочего хода гидроцилиндров в общем случае не реализуются в полной мере, а процесс деформации заготовки (поковки) происходит с пониженным значением КПД машины по усилию, что является недостатками известной конструкции радиально-ковочной машины.
Следует также отметить, что при работе рассматриваемой машины возможно нарушение сплошности рабочей жидкости в рабочих камерах насосов-пульсаторов, что отрицательно сказывается на функционировании гидропривода и машины в целом.
Рассматриваемая радиально-ковочная машина не содержит в своем составе устройств, обеспечивающих возможность остановки бойков без остановки приводящего электродвигателя насосов-пульсаторов или размыкания силовой цепи привода указанных насосов. В силу этого при ее эксплуатации возникает необходимость в повышенном количестве пусков и остановов, по крайней мере, насосов-пульсаторов, что приводит к дополнительным затратам энергии и отрицательно сказывается на ресурсе как насосов-пульсаторов, так и всех элементов их привода, включая приводящий электродвигатель, уменьшая эффективность машины в целом.
Основной технической задачей, решаемой изобретением, является создание способа управления пульсаторным гидроприводом радиально-ковочной машины, обеспечивающего гарантированное увеличение максимального ковочного усилия машины при установленном значении максимально допустимого давления в полостях рабочего хода гидроцилиндров привода бойков и повышение коэффициента полезного действия машины по усилию за счет изменения давления в полости обратного хода гидроцилиндра до достижения минимума при превышении значением давления в полости рабочего хода гидроцилиндра предельного значения, соответствующего работе машины без нагрузки, из условия поддержания давления в полости рабочего хода гидроцилиндра на уровне, соответствующем работе машины без нагрузки, то есть за счет сведения в процессе деформации заготовки (поковки) усилия, создаваемого от давления жидкости в полости обратного хода гидроцилиндра, до минимума.
Другой задачей изобретения является создание способа управления пульсаторным гидроприводом радиально-ковочной машины с повышенными максимальным ковочным усилием (при установленном значении максимально допустимого давления в полостях рабочего хода гидроцилиндров привода бойков) и коэффициентом полезного действия по усилию, обеспечивающего при необходимости остановку бойков при работающих насосах-пульсаторах за счет того, что рабочие камеры насосов-пульсаторов разобщают с соответствующими полостями рабочего и обратного ходов гидроцилиндров и сообщают с наполнительным гидробаком, при этом в полостях обратного хода гидроцилиндров поддерживают постоянное рабочее давление, необходимое для возврата бойков.
Следующей основной технической задачей изобретения является создание устройства для реализации способа, обеспечивающего гарантированное увеличение максимального ковочного усилия радиально-ковочной машины при установленном значении максимально допустимого давления в полостях рабочего хода гидроцилиндров привода бойков и повышение коэффициента полезного действия машины по усилию.
Задачей изобретения, относящегося к устройству, является также создание устройства для реализации способа, обеспечивающего возможность остановки бойков при работающих насосах-пульсаторах, что повышает эффективность и универсальность устройства.
Для решения поставленной задачи в известном способе управления пульсаторным гидроприводом радиально-ковочной машины с приводом бойков посредством гидроцилиндров при работе машины в режиме ковки, включающем попеременные подачу и отвод рабочей жидкости в противофазе в полости рабочего и обратного ходов гидроцилиндров, осуществляемые посредством плунжерных насосов-пульсаторов, согласно изобретению начиная с момента прохождения плунжером каждого насоса-пульсатора, соединенного с полостью рабочего хода соответствующего гидроцилиндра, задней мертвой точки, при превышении значением давления в полости рабочего хода гидроцилиндра предельного значения, соответствующего работе машины без нагрузки, давление в полости обратного хода гидроцилиндра изменяют до достижения минимума из условия поддержания давления в полости рабочего хода гидроцилиндра на уровне, соответствующем работе машины без нагрузки, а начиная с момента прохождения плунжером каждого насоса-пульсатора, соединенного с полостью рабочего хода гидроцилиндра, передней мертвой точки в полости обратного хода гидроцилиндра поддерживают постоянное рабочее давление, необходимое для возврата бойка.
Кроме того, в частном случае реализации способа техническая задача достигается за счет следующих признаков.
Согласно изобретению для остановки бойков при работающих насосах-пульсаторах рабочие камеры насосов-пульсаторов разобщают с соответствующими полостями рабочего и обратного ходов гидроцилиндров и сообщают с наполнительным гидробаком, при этом в полостях обратного хода гидроцилиндров поддерживают постоянное рабочее давление, необходимое для возврата бойков.
В соответствии с изобретением, относящимся к устройству для реализации способа, в известной радиально-ковочной машине, содержащей станину и бойки, каждый из которых оснащен приводом в виде гидроцилиндров, полости рабочего и обратного ходов которых соединены с рабочими камерами соответствующих плунжерных насосов-пульсаторов, и гидрораспределителя, присоединенного своим исполнительным каналом к гидролинии между полостью обратного хода гидроцилиндров и рабочей камерой соответствующего насоса-пульсатора и соединенного своим напорным каналом с гидравлическим источником питания, а выходным каналом - со сливом, согласно изобретению плунжерные насосы-пульсаторы привода каждого бойка выполнены с валом, соединенным с их плунжерами, упомянутый привод снабжен электронным блоком управления, датчиком положения вала насосов-пульсаторов и датчиками давления в полостях рабочего и обратного ходов гидроцилиндров, а гидрораспределитель выполнен дросселирующим с электрическим управлением, при этом электрический вход упомянутого гидрораспределителя соединен с выходом электронного блока управления, входы которого соединены с выходами датчика положения вала насосов-пульсаторов и датчиков давления в полостях рабочего и обратного ходов гидроцилиндров.
В частном случае исполнения радиально-ковочной машины согласно изобретению электронный блок управления выполнен в виде контроллера.
В другом частном случае исполнения радиально-ковочной машины согласно изобретению машина снабжена наполнительным гидробаком и трехлинейными двухпозиционными распределительными гидравлическими устройствами, установленными в гидролинии привода каждого бойка между рабочей камерой плунжерного насоса-пульсатора, соединенного с полостью обратного хода гидроцилиндров, и местом подсоединения к указанной гидролинии исполнительного канала гидрораспределителя, а также в гидролинии между полостью рабочего хода гидроцилиндров и рабочей камерой соответствующего плунжерного насоса-пульсатора, при этом третий канал каждого из указанных трехлинейных двухпозиционных распределительных гидравлических устройств соединен с наполнительным гидробаком.
В соответствии с изобретением давление рабочей жидкости в полости обратного хода гидроцилиндра привода каждого бойка в процессе ковки изменяют по определенному закону, а именно начиная с момента прохождения плунжером каждого насоса-пульсатора, соединенного с полостью рабочего хода гидроцилиндра, задней мертвой точки, при превышении значением давления в полости рабочего хода гидроцилиндра предельного значения, соответствующего работе машины без нагрузки, давление в полости обратного хода гидроцилиндра изменяют до достижения минимума из условия поддержания давления в полости рабочего хода гидроцилиндра на уровне, соответствующем работе машины без нагрузки. Это обеспечивает уменьшение усилия, создаваемого от давления жидкости в полости обратного хода гидроцилиндра, направленного противоположно усилию, развиваемому от давления рабочей жидкости в полости рабочего хода соответствующего из гидроцилиндров привода бойков, на величину, пропорциональную значению уменьшения давления в полости обратного хода. В результате требуемое усилие деформации заготовки (поковки) достигается при меньшем значении давления в полостях рабочего хода гидроцилиндров и, соответственно, при более высоком значении коэффициента полезного действия радиально-ковочной машины по усилию, обеспечивается гарантированное увеличение максимального ковочного усилия машины при установленном значении максимально допустимого давления в полостях рабочего хода гидроцилиндров привода бойков. Поскольку при реализации изобретения требуемые значения ковочного усилия достигаются при меньшем значении давления в полостях рабочего хода гидроцилиндров привода бойков, то снижается напряженность работы пульсаторного гидропривода машины в целом и, следовательно, повышается его долговечность.
Поддержание в полости обратного хода гидроцилиндра привода каждого бойка, начиная с момента прохождения плунжером каждого насоса-пульсатора, соединенного с полостью рабочего хода гидроцилиндра, передней мертвой точки, постоянного рабочего давления, необходимого для возврата бойка, исключает возможность нарушения сплошности рабочей жидкости в рабочей камере указанного насоса-пульсатора, а для радиально-ковочных машин с большим номинальным усилием, у которых бойки закрепляются на поворотных рычагах, а создание усилия деформации осуществляется с помощью главных гидроцилиндров, неподвижно установленных на станине машины, исключает возможность раскрытия стыка между гидростатической опорой, через которую выходное звено каждого из главных гидроцилиндров взаимодействует с поворотным рычагом, и ответной поверхностью рычага.
Разобщение рабочих камер насосов-пульсаторов с соответствующими полостями рабочего и обратного ходов гидроцилиндров и сообщение их с наполнительным гидробаком, а также поддержание при этом в полостях обратного хода гидроцилиндров постоянного рабочего давления, необходимого для возврата бойков, позволяет останавливать бойки (например, для контроля их состояния, исключения непроизводительных затрат энергии в паузы между ковками и т.п.) без остановки приводящего электродвигателя насосов-пульсаторов или размыкания силовой цепи привода указанных насосов, что повышает универсальность и эффективность способа, поскольку: во-первых, пуск насосов-пульсаторов, а тем более полностью их привода является энергоемким процессом, и, во-вторых, увеличение количества пусков и остановов агрегатов приводит к уменьшению их срока службы.
Согласно изобретению, относящемуся к устройству, давление жидкости в полости обратного хода гидроцилиндра привода каждого бойка регулируют посредством дросселирующего гидрораспределителя с электрическим управлением, исполнительный канал которого присоединен к гидролинии между полостью обратного хода гидроцилиндра и рабочей камерой соответствующего насоса-пульсатора, напорный канал соединен с гидравлическим источником питания, а выходной канал - со сливом. Электрический вход гидрораспределителя соединен с выходом электронного блока управления (контроллера), входы которого соединены с выходами датчика положения вала насоса-пульсатора и датчиков давления в полостях рабочего и обратного ходов гидроцилиндров.
С выхода электронного блока управления (контроллера) на электрический вход гидрораспределителя в соответствии с текущими значениями сигналов, поступающих на входы электронного блока с датчика положения вала насоса-пульсатора и датчиков давления в полостях рабочего и обратного ходов гидроцилиндров, подается электрический сигнал согласно следующему алгоритму.
Начиная с момента прохождения плунжером насоса-пульсатора, соединенного с полостью рабочего хода гидроцилиндра, задней мертвой точки (что фиксируется с помощью датчика положения вала насосов-пульсаторов), при превышении значением давления в полости рабочего хода гидроцилиндра экспериментально установленного предельного значения, соответствующего работе машины без нагрузки, величина вышеуказанного электрического сигнала пропорциональна разности между текущим значением давления в полости рабочего хода гидроцилиндра (определяемым с помощью соответствующего датчика) и предельным значением давления в полости рабочего хода гидроцилиндра, соответствующим работе машины без нагрузки. При положительном значении указанного сигнала пропорционально его величине открывается проходное сечение рабочего окна, через которое исполнительный канал гидрораспределителя соединяется с его выходным каналом и, соответственно, со сливом, в результате чего давление в полости обратного хода гидроцилиндра уменьшается. При нулевом значении сигнала, поступающего на электрический вход дросселирующего гидрораспределителя, все каналы последнего перекрыты. При отрицательном значении сигнала, поступающего на электрический вход дросселирующего гидрораспределителя, пропорционально его величине открывается проходное сечение рабочего окна, через которое исполнительный канал гидрораспределителя соединяется с его напорным каналом и, соответственно, с источником гидравлического питания, вследствие чего давление в полости обратного хода гидроцилиндра увеличивается. В результате после вступления бойка в контакт с заготовкой (поковкой) и начала ее деформирования до тех пор, пока давление в полости обратного хода гидроцилиндра не снизится до минимального значения, близкого к давлению слива, давление в полости рабочего хода гидроцилиндра поддерживается на уровне предельного значения давления в этой полости, соответствующего работе машины без нагрузки. После снижения давления в полости обратного хода гидроцилиндра до минимума, что соответствует максимальному положительному сигналу, поступающего на электрический вход дросселирующего гидрораспределителя, и открытию проходного сечения рабочего окна, через которое исполнительный канал гидрораспределителя соединяется с его выходным каналом, на максимальную величину, давление в полости рабочего хода гидроцилиндра увеличивается пропорционально увеличению сопротивления заготовки (поковки) деформации. В итоге требуемое усилие деформации заготовки (поковки) достигается при меньшем значении давления в полостях рабочего хода гидроцилиндров и, соответственно, при более высоком значении коэффициента полезного действия радиально-ковочной машины по усилию, обеспечивается гарантированное увеличение максимального ковочного усилия машины при установленном значении максимально допустимого давления в полостях рабочего хода гидроцилиндров привода бойков.
Начиная с момента прохождения плунжером насоса-пульсатора, соединенного с полостью рабочего хода гидроцилиндра, передней мертвой точки на электрический вход гидрораспределителя подается сигнал, пропорциональный разности между текущим значением давления рабочей жидкости в полости обратного хода гидроцилиндра (определяемым с помощью соответствующего датчика) и значением давления, которое необходимо для возврата (разведения) бойков. Благодаря этому в полости обратного хода гидроцилиндра поддерживают постоянное рабочее давление, необходимое для возврата бойка.
Установка в гидролинии между рабочей камерой плунжерного насоса-пульсатора, соединенного с полостью обратного хода гидроцилиндра, и местом подсоединения к указанной гидролинии исполнительного канала гидрораспределителя и в гидролинии между полостью рабочего хода гидроцилиндра и рабочей камерой соответствующего плунжерного насоса-пульсатора трехлинейных двухпозиционных распределительных устройств, третий канал каждого из которых соединен с наполнительным гидробаком, позволяет разобщать рабочие камеры насосов-пульсаторов с соответствующими полостями рабочего и обратного ходов гидроцилиндров и сообщать их с наполнительным гидробаком, обеспечивая тем самым остановку бойков при работающих насосах-пульсаторах, что повышает эффективность и универсальность устройства.
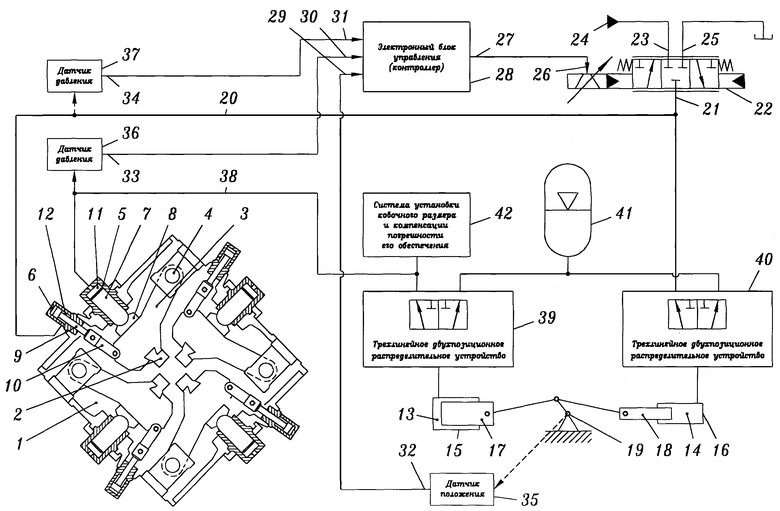
Сущность группы изобретений поясняется чертежом, на котором схематически изображена предлагаемая радиально-ковочная машина.
На чертеже показана четырехбойковая машина (в общем случае количество бойков может быть иным). Поскольку пульсаторный гидропривод всех бойков выполнен идентичным, то элементы привода приведены только для одного бойка.
Радиально-ковочная машина содержит станину 1, бойки 2, закрепленные на рычагах 3, установленных на станине 1 с возможностью поворота относительно осей 4 (бойки могут крепиться не на рычагах, а непосредственно на плунжерах гидроцилиндров - такое исполнение на чертеже не показано). Каждый из бойков 2 снабжен приводом в виде гидроцилиндров 5, 6, жестко закрепленных на станине 1. Плунжер 7 гидроцилиндра рабочего хода 5 взаимодействует с рычагом 3 через гидростатическую опору 8. Шток 9 гидроцилиндра обратного хода 6 связан с рычагом 3 через тягу 10. Полости 11, 12 соответственно рабочего и обратного ходов гидроцилиндров 5, 6 соединены с рабочими камерами 13, 14 соответствующих плунжерных насосов-пульсаторов 15, 16, плунжеры 17, 18 которых посредством кривошипно-шатунных механизмов соединены с валом 19 с обеспечением движения их в противофазе. При этом к гидролинии 20 между полостью обратного хода 12 гидроцилиндра 6 и рабочей камерой 14 соответствующего насоса-пульсатора 16 присоединен своим исполнительным каналом 21 трехлинейный трехпозиционный дросселирующий гидрораспределитель 22 с электрическим управлением. Гидрораспределитель 22 соединен своим напорным каналом 23 с гидравлическим источником питания 24, на выходе которого поддерживается давление, большее величины, необходимой для возврата бойков 2, а выходным каналом 25 - со сливом. При нулевом электрическом сигнале на электрическом входе 26 гидрораспределителя 22 все каналы последнего перекрыты. При положительном электрическом сигнале на электрическом входе 26 гидрораспределителя 22 его исполнительный канал 21 соединен с выходным каналом 25, а при отрицательном сигнале - с напорным каналом 23. Электрический вход 26 гидрораспределителя 22 соединен с выходом 27 электронного блока управления (контроллера) 28, входы 29, 30, 31 которого соединены с выходами 32, 33, 34 соответственно датчика положения 35 вала 19 насосов-пульсаторов и датчиков давления 36, 37 в полостях 11, 12 соответственно рабочего и обратного ходов гидроцилиндров 5, 6. Электронный блок управления (контроллер) 28 соединен также с пультом управления (панелью оператора) радиально-ковочной машины (на чертеже пульт управления не показан). В гидролинии 20 между рабочей камерой 14 плунжерного насоса-пульсатора 16, соединенного с полостью обратного хода 12 гидроцилиндра 6, и местом подсоединения к указанной гидролинии исполнительного канала 21 гидрораспределителя 22 и в гидролинии 38 между полостью 11 рабочего хода гидроцилиндра 5 и рабочей камерой 13 соответствующего плунжерного насоса-пульсатора 15 установлены трехлинейные двухпозиционные распределительные устройства соответственно 39, 40, третий канал каждого из которых соединен с наполнительным гидробаком 41. Посредством указанных распределительных устройств рабочая камера соответствующего насоса-пульсатора сообщается с наполнительным гидробаком 41 или полостью гидроцилиндра.
К гидролинии 38 подсоединена система 42 установки ковочного размера и компенсации погрешности его обеспечения.
Трехлинейные двухпозиционные распределительные устройства 39, 40 и система 42 установки ковочного размера и компенсации погрешности его обеспечения имеют электрическое управление, и их электрические входы соединены с соответствующими выходами электронного блока управления (контроллера) 28 (на чертеже перечисленные соединения не показаны).
Радиально-ковочная машина работает следующим образом. Вращательное движение вала 19 посредством кривошипно-шатунных механизмов преобразуется в возвратно-поступательное движение в противофазе плунжеров 17, 18 насосов-пульсаторов 15, 16.
При разобщении посредством трехлинейных двухпозиционных распределительных устройств 39, 40 рабочих камер 13, 14 насосов-пульсаторов 15, 16 с полостями 11, 12 соответственно рабочего и обратного ходов гидроцилиндров 5, 6 и сообщении указанных рабочих камер 13, 14 с наполнительным гидробаком 41 рабочая жидкость из рабочих камер 13, 14 насосов-пульсаторов 15, 16 перетекает в наполнительный гидробак 41 и обратно. Каналы распределительных устройств 39, 40, с которыми соединены полости 11, 12 соответственно рабочего и обратного ходов гидроцилиндров 5, 6 при этом перекрыты, а в полости обратного хода 12 гидроцилиндра 6 с помощью дросселирующего гидрораспределителя 22 поддерживается постоянное рабочее давление, необходимое для возврата бойков 2, что исключает возможность раскрытия стыка между гидростатической опорой 8, через которую плунжер 7 гидроцилиндра 5 взаимодействует с поворотным рычагом 3, и ответной поверхностью рычага 3. Для этого с выхода 27 электронного блока управления (контроллера) 28 на электрический вход 26 дросселирующего гидрораспределителя 22 подается электрический сигнал, пропорциональный разности между текущим значением давления рабочей жидкости в полости обратного хода 12 гидроцилиндра 6 (определяемым с помощью датчика давления 37) и значением давления, которое необходимо для возврата (разведения) бойков 2. В рассматриваемой ситуации бойки 2 машины находятся в состоянии остановки, что целесообразно в паузы между ковками для исключения непроизводительных затрат энергии и снижения износа гидроцилиндров 5, 6, гидростатических опор 8 и шарнирных соединений рычагов 3 со станиной 1 и тягой 10, а также может использоваться для контроля состояния бойков 2 при работающей машине.
Следует отметить, что при наличии соответствующего сигнала переключение трехлинейных двухпозиционных распределительных устройств 39, 40 производится синхронно в момент времени, когда плунжер 17 насоса-пульсатора 15 проходит свою заднюю мертвую точку. Соответственно, остановка бойков 2 происходит в их задней мертвой точке (то есть при разведенных бойках). С помощью системы 42 установки ковочного размера и компенсации погрешности его обеспечения по сигналу, поступающему на ее вход с соответствующего выхода электронного блока управления (контроллера) 28, путем подачи дополнительного объема рабочей жидкости в гидролинию 38 (и тем самым в полость рабочего хода 11 гидроцилиндра 5) или отбора жидкости из этой гидролинии положение задней мертвой точки бойка 2 и, соответственно, установка ковочного размера могут быть изменены, а именно при подаче дополнительного объема жидкости ковочный размер уменьшается, при отборе жидкости ковочный размер увеличивается.
Путем разобщения посредством трехлинейных двухпозиционных распределительных устройств 39, 40 рабочих камер 13, 14 насосов-пульсаторов 15, 16 с наполнительным гидробаком 41 и сообщения их с полостями 11, 12 соответственно рабочего и обратного ходов гидроцилиндров 5, 6 машина переводится в режим ковки.
С момента прохождения плунжером 17 насоса-пульсатора 15, соединенного с полостью 11 рабочего хода гидроцилиндра 5, задней мертвой точки (что фиксируется с помощью датчика положения 35 вала 19 насосов-пульсаторов) плунжер 17 начинает входить в рабочую камеру 13, соответственно в этот момент плунжер 18 насоса-пульсатора 16, соединенного с полостью 12 обратного хода гидроцилиндра 6, начинает выходить из рабочей камеры 14. Рабочая жидкость вытесняется из рабочей камеры 13 насоса-пульсатора 15 и по гидролинии 38 поступает в полость 11 рабочего хода гидроцилиндра 5. В результате этого плунжер 7 выдвигается из полости 11 гидроцилиндра 5, поворачивает через гидростатическую опору 8 рычаг 3 с бойком 2 относительно оси 4 в направлении заготовки (поковки) (на чертеже заготовка не показана), а рычаг 3, в свою очередь, через тягу 10 вытягивает из гидроцилиндра 6 обратного хода его шток 9. Вытесняемая при этом из полости обратного хода 12 гидроцилиндра 6 рабочая жидкость перетекает по гидролинии 20 в рабочую камеру 14 насоса-пульсатора 16. Пока давление рабочей жидкости в полости рабочего хода 11 гидроцилиндра 5, контролируемое с помощью датчика давления 36, не превысило экспериментально установленное предельное значение, соответствующее работе машины без нагрузки, с выхода 27 электронного блока управления (контроллера) 28 на электрический вход 26 дросселирующего гидрораспределителя 22 подается электрический сигнал, пропорциональный разности между текущим значением давления рабочей жидкости в полости обратного хода 12 гидроцилиндра 6 (определяемым с помощью датчика давления 37) и значением давления, которое необходимо для возврата (разведения) бойков 2. В результате в полости обратного хода 12 гидроцилиндра 6 с помощью дросселирующего гидрораспределителя 22 поддерживается постоянное рабочее давление, необходимое для возврата бойков 2, что исключает возможность раскрытия стыка между гидростатической опорой 8, через которую плунжер 7 гидроцилиндра 5 взаимодействует с поворотным рычагом 3, и ответной поверхностью рычага 3.
После превышения давлением рабочей жидкости в полости рабочего хода 11 гидроцилиндра 5 экспериментально установленного предельного значения, соответствующего работе машины без нагрузки, что происходит после вступления бойка 2 в контакт с заготовкой (поковкой) и начала ее деформирования, на основании сигнала с датчика давления 36 с выхода 27 электронного блока управления (контроллера) 28 на электрический вход 26 дросселирующего гидрораспределителя 22 подается электрический сигнал, пропорциональный разности между текущим значением давления рабочей жидкости в полости рабочего хода 11 гидроцилиндра 5 (определяемым с помощью датчика давления 36) и предельным значением давления в полости 11, соответствующим работе машины без нагрузки. При положительном значении указанного сигнала пропорционально его величине открывается проходное сечение рабочего окна, через которое исполнительный канал 21 гидрораспределителя 22 соединяется с его выходным каналом 25 и, соответственно, со сливом, в результате чего давление в полости обратного хода 12 гидроцилиндра 6 уменьшается. При отрицательном значении сигнала, поступающего на электрический вход 26 дросселирующего гидрораспределителя 22, пропорционально его величине открывается проходное сечение рабочего окна, через которое исполнительный канал 21 гидрораспределителя соединяется с его напорным каналом 23 и, соответственно, с источником гидравлического питания 24, вследствие чего давление в полости обратного хода 12 гидроцилиндра 6 увеличивается. В результате после вступления бойка 2 в контакт с заготовкой (поковкой) и начала ее деформирования до тех пор, пока давление в полости обратного хода 12 гидроцилиндра 6 не снизится до минимального значения, близкого к давлению слива, давление в полости рабочего хода 11 гидроцилиндра 5 поддерживается на уровне предельного значения давления в этой полости, соответствующего работе машины без нагрузки. После снижения давления в полости обратного хода 12 гидроцилиндра 6 до минимума, что соответствует максимальному положительному сигналу, поступающего на электрический вход 26 дросселирующего гидрораспределителя 22, и открытию проходного сечения рабочего окна, через которое исполнительный канал 21 гидрораспределителя 22 соединяется с его выходным каналом 25, на максимальную величину, давление в полости рабочего хода 11 гидроцилиндра 5 увеличивается пропорционально увеличению сопротивления заготовки (поковки) деформации. В итоге требуемое усилие деформации заготовки (поковки) достигается при меньшем значении давления в полостях рабочего хода 11 гидроцилиндров 5 и, соответственно, при более высоком значении коэффициента полезного действия радиально-ковочной машины по усилию, обеспечивается гарантированное увеличение максимального ковочного усилия машины при установленном значении максимально допустимого давления в полостях рабочего хода 11 гидроцилиндров 5 привода бойков 2. Поскольку требуемые значения ковочного усилия достигаются при меньшем значении давления в полостях рабочего хода 11 гидроцилиндров 5, то снижается напряженность работы пульсаторного гидропривода машины в целом и, следовательно, повышается его долговечность.
С момента прохождения плунжером 17 насоса-пульсатора 15, соединенного с полостью 11 рабочего хода гидроцилиндра 5, передней мертвой точки (что фиксируется с помощью датчика положения 35 вала 19 насосов-пульсаторов), плунжер 17 начинает выходить из рабочей камеры 13, соответственно в этот момент плунжер 18 насоса-пульсатора 16, соединенного с полостью 12 обратного хода гидроцилиндра 6, начинает входить в рабочую камеру 14. Рабочая жидкость вытесняется из рабочей камеры 14 насоса-пульсатора 16 и по гидролинии 20 поступает в полость обратного хода 12 гидроцилиндра 6. В результате этого шток 9 гидроцилиндра 6 втягивается и через тягу 10 поворачивает рычаг 3 с бойком 2 вокруг оси 4 в направлении разведения бойков 2, а рычаг 3 в свою очередь через гидростатическую опору 8 перемещает плунжер 7 внутрь полости рабочего хода 11 гидроцилиндра 5. Вытесняемая при этом из полости рабочего хода 11 гидроцилиндра 5 рабочая жидкость перетекает по гидролинии 38 в рабочую камеру 13 насоса-пульсатора 15. В данном случае с выхода 27 электронного блока управления (контроллера) 28 на электрический вход 26 дросселирующего гидрораспределителя 22 подается электрический сигнал, пропорциональный разности между текущим значением давления рабочей жидкости в полости обратного хода 12 гидроцилиндра 6 (определяемым с помощью датчика давления 37) и значением давления, которое необходимо для возврата (разведения) бойков. Благодаря этому в полости обратного хода 12 гидроцилиндра 6 поддерживается постоянное рабочее давление, необходимое для возврата бойка 2, что в процессе разведения бойков исключает возможность нарушения сплошности рабочей жидкости в рабочей камере 13 насоса-пульсатора 15 и возможность раскрытия стыка между гидростатической опорой 8, через которую плунжер 7 гидроцилиндра 5 взаимодействует с поворотным рычагом 3, и ответной поверхностью рычага 3.
В процессе ковки с помощью системы 42 установки ковочного размера и компенсации погрешности его обеспечения осуществляется компенсация погрешности обеспечения ковочного размера, обусловленной утечками и сжимаемостью рабочей жидкости, а также упругими деформациями металлоконструкций машины, и производится изменение ковочного размера, что позволяет ковать заготовки (поковки) переменного профиля.
Таким образом, как следует из вышеизложенного, предлагаемая группа изобретений обеспечивает гарантированное увеличение максимального ковочного усилия радиально-ковочной машины при установленном значении максимально допустимого давления в полостях рабочего хода гидроцилиндров привода бойков и повышение коэффициента полезного действия машины по усилию.
Литературные источники
1. Привод рабочих инструментов ковочной машины. Авторское свидетельство СССР №841764, МКИ В 21 J 7/14, В 21 J 7/28. Заявлено 28.11.1978. Опубликовано 30.06.1981.
2. Радиально-ковочная машина. Авторское свидетельство СССР №508319, МКИ В 21 J 7/16. Заявлено 09.04.1973. Опубликовано 30.03.1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПУЛЬСАТОРНЫЙ ГИДРОПРИВОД РАДИАЛЬНО-КОВОЧНОЙ МАШИНЫ | 2003 |
|
RU2241565C1 |
| СИСТЕМА КОМПЕНСАЦИИ ПОГРЕШНОСТИ ОБЕСПЕЧЕНИЯ КОВОЧНОГО РАЗМЕРА РАДИАЛЬНО-КОВОЧНОЙ МАШИНЫ | 2003 |
|
RU2241566C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВИЖНОЙ ТРАВЕРСОЙ ГИДРАВЛИЧЕСКОГО ПРЕССА | 2021 |
|
RU2764536C1 |
| ГИДРОПРИВОД ТРАВЕРСЫ ПРЕССА | 2013 |
|
RU2530917C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПОДВИЖНОЙ ТРАВЕРСЫ ПРЕССА | 2013 |
|
RU2515779C1 |
| МУЛЬТИПЛИКАТОР ДАВЛЕНИЯ | 2010 |
|
RU2450173C1 |
| ГИДРОПРИВОД ПОДВИЖНОЙ ТРАВЕРСЫ ПРЕССА | 2015 |
|
RU2602934C1 |
| ГИДРОПРИВОД ПОДВИЖНОЙ ТРАВЕРСЫ ПРЕССА | 2015 |
|
RU2598410C1 |
| Радиально-ковочная машина | 1983 |
|
SU1186343A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПОДВИЖНОЙ ТРАВЕРСЫ ПРЕССА | 2011 |
|
RU2468919C1 |
Изобретения относятся к обработке металлов давлением и могут быть использованы в кузнечно-прессовом производстве. Способ управления включает попеременные подачу и отвод рабочей жидкости в противофазе в полости рабочего и обратного ходов гидроцилиндров, которые осуществляют посредством плунжерных насосов-пульсаторов. Начиная с момента прохождения плунжером каждого насоса-пульсатора, соединенного с полостью рабочего хода, задней мертвой точки, при превышении давления в полости рабочего хода своего предельного значения давление в полости обратного хода изменяют до минимума. При этом соблюдают условие поддержания давления в полости рабочего хода, соответствующего работе машины без нагрузки. Начиная с момента прохождения упомянутым плунжером передней мертвой точки, в полости обратного хода поддерживают постоянное рабочее давление. Радиально-ковочная машина содержит станину и бойки, каждый из которых имеет привод в виде гидроцилиндров, соединенных с рабочими камерами плунжерных насосов-пульсаторов, и гидрораспределителя. Привод оснащен электронным блоком управления, датчиком положения вала насосов-пульсаторов и датчиками давления в полостях рабочего и обратного ходов гидроцилиндров. Гидрораспределитель выполнен дросселирующим с электрическим управлением. В результате обеспечивается повышение максимального ковочного усилия машины, увеличение ее эффективности и универсальности. 2 с. и 3 з.п. ф-лы, 1 ил.
| Радиально-ковочная машина | 1973 |
|
SU508319A1 |
| Радиально-ковочная машина | 1974 |
|
SU565445A1 |
| Радиально-ковочная машина | 1976 |
|
SU692664A1 |
| DE 2951587 A1, 02.07.1981 | |||
| US 5732588 А, 31.03.1998. | |||

