Изобретение относится к области вооружения, в частности к военным гусеничным машинам, оснащенным системой противовоздушной обороны, а также может быть использовано при модернизации различных типов БТТ, находящихся в эксплуатации, для расширения их боевых возможностей и повышения боевой мощи.
Известен бронированный танк с зенитным вооружением (патент США №3602088, F 41 Н 5/16, опубл. 31.08.1971 г.), содержащий вращающуюся башню, которая оборудована двумя подвижными автоматическими зенитными пушками и радиолокационными средствами обнаружения и наведения на цель. В башне предусмотрены места для членов экипажа, оптические перископы, подставки для экранов радаров, баллистический вычислитель для расчета элементов стрельбы зенитных орудий в зависимости от относительного положения целей, органы ручного управления и отсек для хранения боеприпасов. Зенитные пушки установлены на боковых стенках башни с внешней ее стороны. Танк представляет собой полностью автономную подвижную бронированную машину, которая может применяться в любую погоду в мобильных боевых подразделениях.
В указанном техническом решении отсутствует крупнокалиберная танковая пушка, что значительно снижает боевую мощь танка.
В качестве прототипа выбран танк (см. журнал “Military Technology”, статья “Slovak Army Selects Westernised T-72 Upgrade”, 1994, №10, с.82-86), содержащий корпус, башню с основным вооружением - крупнокалиберной (калибр 125 мм) пушкой, комплексом управления огнем основного вооружения (КУО ОВ), панорамным прицелом командира и основным прицелом наводчика. По бортам башни ниже уровня установки блока зеркала панорамного прицела командира дополнительно размещены, как средство борьбы с воздушными и другими опасными для танка целями, две 20 мм автоматические зенитные пушки, что значительно повысило боевую мощь танка, не увеличивая при этом его общую высоту и не создавая преград в поле зрения панорамного прицела. Пушки установлены на кронштейнах, которые жестко закреплены на башне танка.
Данная конструкция имеет следующие недостатки:
- использование для горизонтального наведения зенитного вооружения поворота башни с пушкой, имеющей большую зону обметания, не позволяет одновременно вести стрельбу из зенитных пушек и основного вооружения по разным целям, ограничивает возможности применения и снижает боевую эффективность зенитного вооружения;
- использование для наведения зенитных пушек привода горизонтального наведения основного вооружения снижает точность стрельбы из них и живучесть танка, так как выход из строя данного привода исключает ведение прицельной стрельбы как из основного, так и зенитного вооружения.
Настоящим изобретением решается задача, заключающаяся в повышении боевой эффективности танка путем обеспечения автономной работы зенитных установок с возможностью одновременного прицеливания и ведения огня из основного вооружения и ЗУ по различным целям во всем диапазоне курсовых углов (0...360°).
Поставленная задача решается тем, что в танке с зенитным вооружением, содержащем корпус, вращающуюся башню с основным вооружением (ОВ), комплексом управления огнем из него, панорамный прицел командира и основной прицел наводчика, установленные по бортам башни зенитные установки с приводом вертикального наведения и комплексом управления огнем, согласно изобретению каждая ЗУ размещена в бронированной башенке и установлена посредством вращающегося погона на платформе, закрепленной к борту башни, и снабжена индивидуальным приводом горизонтального наведения, механизм которого связан с вышеупомянутым погоном, механизм привода вертикального наведения расположен в бронированной башенке и выполнен индивидуальным для каждой ЗУ, при этом ЗУ синхронизированы по наведению через баллистический вычислитель комплекса управления огнем ЗУ (КУО ЗУ) с возможностью автоматического выхода любой ЗУ из режима синхронизации по вертикальному наведению и приведения ЗУ на угол возвышения для беспрепятственного вращения ЗУ в горизонтальной плоскости, при этом КУО ЗУ связан каналом обмена информацией с комплексом управления огнем основного вооружения (КУО ОВ) с обеспечением возможности ведения огня из ЗУ командиром, независимо от ОВ танка, или наводчиком - с использованием приводов вертикального наведения КУО ЗУ и привода горизонтального наведения ОВ танка, с реализацией автоматического ввода углов прицеливания и упреждения при стрельбе с рабочих мест командира и наводчика.
Для осуществления решения поставленной задачи зенитные установки снабжены датчиками положения каждой ЗУ в горизонтальной и вертикальной плоскостях.
Вышеуказанные датчики положения ЗУ в горизонтальной и вертикальной плоскостях непосредственно, а датчики положения зеркала панорамного прицела командира в горизонтальной и вертикальной плоскостях через канал обмена информацией связаны с баллистическим вычислителем КУО ЗУ.
При этом датчик положения ЗУ в вертикальной плоскости непосредственно, а датчик положения зеркала основного прицела наводчика в вертикальной плоскости через канал обмена информацией связаны с баллистическим вычислителем КУО 3У.
Кроме того, КУО ЗУ выполнен с возможностью выхода ЗУ по команде из режима синхронизации по горизонтальному и вертикальному наведению с автоматическим обеспечением сходимости продольных осей стволов ЗУ и линии визирования панорамного прицела командира в зависимости от дальности до цели и курсового угла.
Анализ отличительных признаков заявляемого изобретения показал, что:
- размещение каждой ЗУ в бронированной башенке и установка ЗУ посредством вращающегося погона на борту башни танка, а также снабжение ее индивидуальными приводами горизонтального и вертикального наведения позволяет осуществлять круговую стрельбу из ЗУ независимо от основного вооружения, повышая тем самым боевую эффективность танка;
- выполнение КУО ЗУ с автоматическим выходом любой ЗУ из режима синхронизации по вертикальному наведению для исключения соударения стволов с элементами башни и приведения ЗУ на угол возвышения для беспрепятственного вращения в горизонтальной плоскости обеспечивает возможность постоянного синхронного наведения ЗУ в горизонтальной плоскости, что уменьшает время, требуемое для приведения ствола ЗУ, вышедшего из зоны разрешения, на угол прицеливания с одновременным включением цепей стрельбы данной ЗУ;
- связь КУО ЗУ через канал обмена информацией с КУО ОВ с обеспечением возможности ведения стрельбы из ЗУ командиром, независимо от основного вооружения танка, или наводчиком - с использованием привода вертикального наведения КУО ЗУ и привода горизонтального наведения основного вооружения танка, с реализацией автоматического ввода углов прицеливания при стрельбе с рабочих мест командира и наводчика, обеспечивает независимость функционирования зенитного вооружения от основного вооружения при управлении ЗУ командиром, возможность управления ЗУ наводчиком, ввод в баллистический вычислитель КУО ЗУ при выработке поправок для стрельбы через канал обмена информацией дальности до цели, поступающей с лазерного дальномера используемого прицела, а также сигналов, получаемых от датчика положения башни, комплекта датчиков подготовки данных (датчик скорости собственного движения, датчики состояния окружающей среды и т.д.);
- связи датчиков положения ЗУ в горизонтальной и вертикальной плоскостях с баллистическим вычислителем КУО ЗУ и датчиков положения зеркала панорамного прицела через канал обмена информацией с баллистическим вычислителем КУО ЗУ обеспечивают автоматическое слежение положения продольных осей ЗУ за положением линии визирования панорамного прицела и с помощью горизонтального и вертикального приводов ЗУ - независимое от основного вооружения стабилизированное наведение ЗУ в двух плоскостях при управлении с рабочего места командира;
- связи датчика положения ЗУ в вертикальной плоскости с баллистическим вычислителем КУО ЗУ и датчика положения зеркала в вертикальной плоскости основного прицела наводчика через канал обмена информацией с баллистическим вычислителем КУО ЗУ обеспечивают автоматическое слежение положения продольных осей стволов ЗУ за положением линии визирования прицела наводчика и с помощью приводов вертикального наведения ЗУ и привода горизонтального наведения основного вооружения стабилизированное наведение ЗУ в двух плоскостях при управлении ЗУ с рабочего места наводчика;
- выполнение КУО ЗУ с возможностью выхода ЗУ по команде из режима синхронизации по горизонтальному и вертикальному наведению ЗУ в зависимости от дальности до цели и курсового угла позволяет обеспечивать заданную сходимость линии визирования панорамного прицела с продольными осями стволов ЗУ, что позволяет вести эффективную стрельбу во всем диапазоне курсовых углов и углов возвышения (при круговом вращении ЗУ меняется расстояние между продольными осями стволов ЗУ и положение в пространстве плоскости, в которой лежат стволы обеих ЗУ) из двух или одной ЗУ.
Заявляемое изобретение поясняется чертежами, где изображены:
на фиг.1 - общий вид танка, вид сбоку;
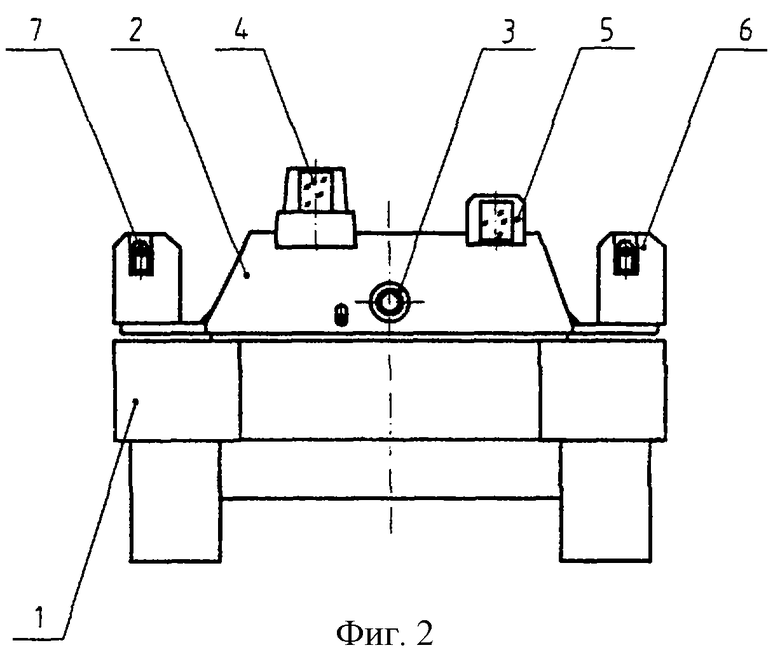
на фиг.2 - общий вид танка, ЗУ в исходном положении, вид спереди;
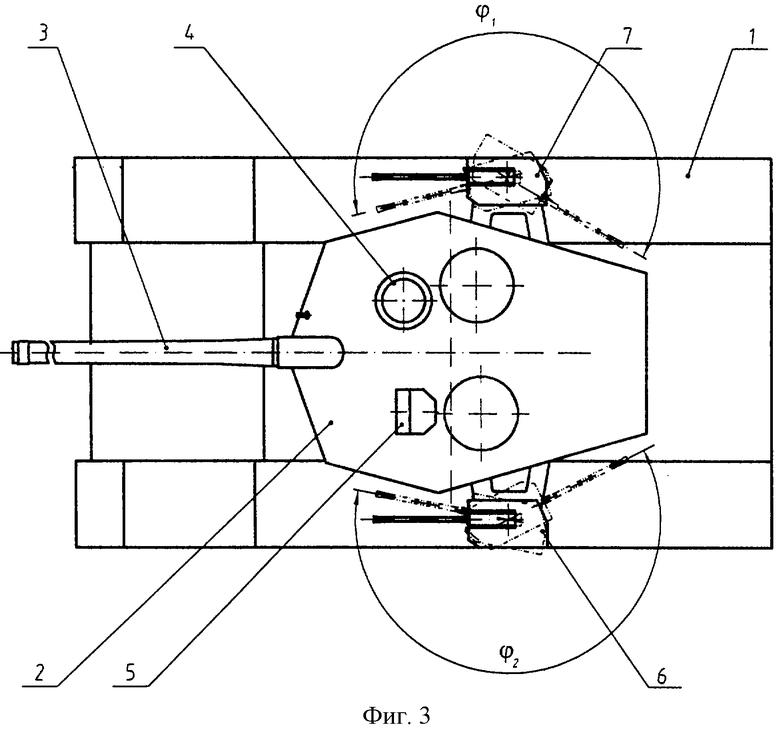
на фиг.3 - общий вид танка, вид сверху;
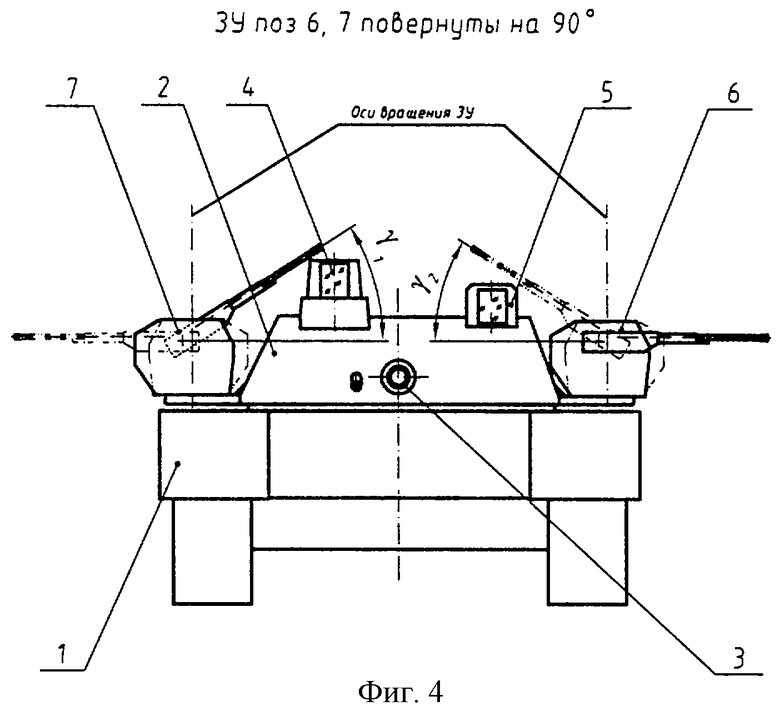
на фиг.4 - общий вид танка, ЗУ развернуты на 90°, вид спереди;
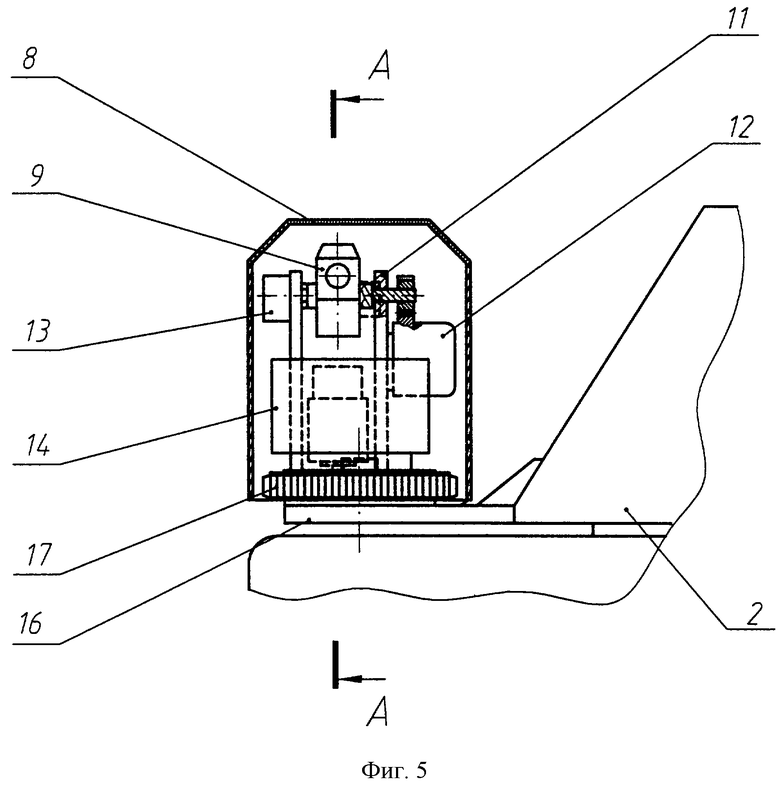
на фиг.5 - бронированная башенка с размещенными внутри нее приводами наведения ЗУ;
на фиг.6 - сечение бронированной башенки по А-А на фиг.5;
на фиг.7 - функциональная схема КУО ЗУ.
Заявляемый танк с зенитным вооружением содержит корпус 1 (фиг.1-3), вращающуюся башню 2 с основным вооружением - пушкой 3, панорамным прицелом 4 командира, основным прицелом наводчика 5 и установленные по бортам башни 2, две зенитные установки 6, 7. Зенитные установки имеют одинаковую конструкцию с зеркальным расположением некоторых узлов относительной продольной оси танка.
Каждая зенитная установка 6 (7) (фиг.5 и 6) размещена в бронированной башенке 8, состоит из пулемета 9 с ударно-спусковым механизмом 10, шарнирно закрепленного на станке 11 и связанного зубчатой передачей с приводом 12 вертикального наведения с датчиком 13 положения вертикального наведения, коробки 14 с боезапасом, вращающегося контактного устройства 15, и установлена на приваренной к башне 2 платформе 16 через вращающийся погон 17, снабженный приводом 18 горизонтального наведения с датчиком 19 положения горизонтального наведения.
Зоны разрешения стрельбы определяются курсовыми углами ϕ1, ϕ2, углами возвышения γ1, γ2 и углом прокачки линии визирования прицела α. Угол α (фиг.1), определяемый полем зрения используемого прицела, ограничивает зону разрешения стрельбы по возвышению и снижению для обеих ЗУ. Углы ϕ1 и ϕ2 имеют переменную величину и определяют границы зоны разрешения стрельбы по курсовым углам для каждой ЗУ. В рабочем положении, например при развороте зенитных установок влево (фиг.4) на 90° относительно продольной оси танка при угле возвышения 0°, ствол ЗУ 7 находится на угле возвышения γ1, обеспечивающем беспрепятственное вращение ЗУ 7 в горизонтальной плоскости, имеющем переменную величину и определяющем нижнюю границу зоны разрешения стрельбы в вертикальной плоскости ЗУ 7 при данном курсовом угле. В данном положении зенитных установок стрельба ведется только из ЗУ 6. Штрих-пунктирной линией с двумя точками показано противоположное положение зенитных установок. Ствол ЗУ 6 находится на угле возвышения γ2, также имеющем переменное значение и определяющем нижнюю границу зоны разрешения стрельбы в вертикальной плоскости ЗУ 7 при данном курсовом угле.
При работе КУО ЗУ использует отдельные элементы КУО ОВ, что отражено на функциональной схеме (фиг.7). Для этого КУО ЗУ связан через канал обмена информацией “К” с КУО ОВ. Как видно из схемы, наряду с датчиками 13 положения вертикального наведения и приводами 12 вертикального наведения, датчиками 19 положения и приводами горизонтального наведения 18, ударно-спусковыми механизмами 10, связанными с баллистическим вычислителем 20 КУО ЗУ, размещенным внутри башни 2 танка, при работе КУО ЗУ из КУО ОВ используются следующие элементы: панорамный прицел командира 4 с встроенным лазерным дальномером 21, датчиком 22 положения зеркала в вертикальной плоскости и датчиком 23 положения зеркала в горизонтальной плоскости, основной прицел 5 наводчика с встроенным лазерным дальномером 24, датчиком 25 положения зеркала в вертикальной плоскости и датчиком 26 положения зеркала в горизонтальной плоскости, пульт 27 управления командира, пульт 28 управления наводчика, привод 29 горизонтального наведения ОВ, связанные с баллистическим вычислителем 30 КУО ОВ через канал “К”. Непосредственно с баллистическим вычислителем 30 связан комплект датчиков 31 подготовки данных (датчик скорости собственного движения, датчики состояния окружающей среды и т.п.) и датчик 32 положения башни 2.
Работа.
Работа КУО ЗУ поясняется функциональной схемой (фиг.7).
Управление ЗУ и ведение прицельного огня из них может осуществлять как командир, так и наводчик.
При управлении ЗУ 6, 7 командиром (основной режим) их стабилизация осуществляется по сигналам панорамного прицела 4. При этом сигналы положения линии визирования панорамного прицела 4, снимаемые с датчиков 22 и 23, подаются через баллистический вычислитель 30 КУО ОВ и канал обмена информацией “К” на баллистический вычислитель 20 КУО ЗУ, где сравниваются с соответствующими сигналами датчиков 13 и 19. Разности этих сигналов (сигналы рассогласования) поступают в соответствующие привода вертикального наведения 11 ЗУ и привода горизонтального наведения 18 ЗУ. Привода поворачивают ЗУ в вертикальной и горизонтальной плоскостях до устранения сигналов рассогласования.
Выработка баллистическим вычислителем 20 углов прицеливания и упреждения, а также углов, обеспечивающих заданную сходимость линии визирования панорамного прицела и продольных осей стволов ЗУ, производится автоматически в зависимости от дальности до цели, измеряемой с помощью лазерного дальномера 21, сигналов группы датчиков 31 подготовки данных и датчика 32 положения башни 2, поступающих по каналу обмена информацией “К”.
Управление линией визирования панорамного прицела 4 осуществляется посредством пульта 27 управления командира.
При наведении прицельной марки на цель и нажатии кнопки стрельбы на пульте управления командира 27 происходит замыкание цепей стрельбы, и в случае нахождения ЗУ в зоне разрешения стрельбы по каналу обмена информацией “К” через баллистический вычислитель 20 сигнал поступает на ударно-спусковые механизмы 10 ЗУ.
Работа КУО ЗУ при управлении с места наводчика (дублирующий режим) происходит следующим образом.
При переходе на дублирующий режим ЗУ приводятся в положение, соответствующее положению линии визирования основного прицела наводчика 5, и стопорятся на башню с отключением приводов горизонтального наведения ЗУ.
Стабилизация ЗУ 6, 7 по вертикальному наведению осуществляется по сигналам основного прицела наводчика 5. Сигнал положения линии визирования основного прицела наводчика 5, снимаемый с датчика 25 положения зеркала в вертикальной плоскости, подается через канал обмена информацией на баллистический вычислитель 20, где сравнивается с соответствующими сигналами датчиков 13 положения вертикального наведения ЗУ. Разности этих сигналов (сигналы рассогласования) поступают в соответствующие привода 12 вертикального наведения ЗУ. Привода поворачивают ЗУ в вертикальной плоскости до устранения сигналов рассогласования.
Стабилизация ЗУ по горизонтальному наведению осуществляется по сигналам основного прицела наводчика 5 с использованием привода 29 горизонтального наведения основного вооружения. Сигнал рассогласования положения оси канала ствола пушки и линии визирования, вырабатываемого датчиком положения зеркала основного прицела наводчика в горизонтальной плоскости, подается в баллистический вычислитель 20, откуда поступает соответствующий сигнал в привод 29 горизонтального наведения ОВ. Привод 29 поворачивает башню 2 с ЗУ до устранения сигнала рассогласования.
Выработка баллистическим вычислителем 20 углов прицеливания и упреждения производится автоматически, в зависимости от дальности до цели, измеряемой лазерным дальномером 24, сигналов датчика 29 положения башни 2 и сигналов группы датчиков 31 подготовки данных, поступающих по каналу обмена информацией “К”, с последующим вводом соответствующих сигналов в привода 12 вертикального наведения ЗУ, и привод 29 горизонтального наведения ОВ.
Управление линией визирования основного прицела наводчика осуществляется посредством пульта 28 управления наводчика.
При наведении прицельной марки на цель и нажатии кнопки стрельбы на пульте 28 управления наводчика происходит замыкание цепей стрельбы и поступление сигнала на ударно-спусковые механизмы 9 ЗУ.
Таким образом, выполнение в заявляемом танке зенитного вооружения в виде автономного зенитного комплекса, не зависящего от работы основного вооружения танка, обеспечивающего ведение круговой стрельбы из ЗУ в диапазоне курсовых углов от 0 до 360° и в диапазоне углов возвышения, ограниченном только углами прокачки линии визирования панорамного прицела, обеспечивает повышение боевой эффективности танка, что и соответствует решению поставленной перед изобретением задачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ТАНКА | 2002 |
|
RU2226664C2 |
| ТАНК | 2001 |
|
RU2218543C2 |
| Система управления огнем боевой машины | 2020 |
|
RU2743893C1 |
| Разведывательно-огневой комплекс вооружения БМОП | 2016 |
|
RU2658517C2 |
| Система управления огнем боевой машины | 2022 |
|
RU2785804C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |
| СПОСОБ СТРЕЛЬБЫ КОМПЛЕКСА ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СПОСОБ ОПРЕДЕЛЕНИЯ ЭКСПЕРИМЕНТАЛЬНОЙ ЗАВИСИМОСТИ УГЛОВОЙ СКОРОСТИ ЛИНИИ ВИЗИРОВАНИЯ | 2012 |
|
RU2529241C2 |
Изобретение относится к области вооружения, в частности к военным гусеничным машинам, оснащенным системой противовоздушной обороны. Сущность изобретения заключается в том, что зенитное вооружение танка выполнено в виде автономного зенитного комплекса, обеспечивающего ведение круговой стрельбы из зенитной установки (ЗУ) в диапазоне курсовых углов от 0 до 360°, командиром танка или наводчиком. ЗУ расположены по бортам башни танка. Каждая из них размещена в бронированной башенке, установлена посредством вращающегося погона на платформе, закрепленной на борту башни, и снабжена индивидуальными приводами горизонтального и вертикального наведения. Механизм привода горизонтального наведения связан с вышеупомянутым погоном. ЗУ синхронизированы по наведению с возможностью автоматического выхода любой из них из режима синхронизации по вертикальному наведению и приведения на угол возвышения для беспрепятственного вращения ЗУ в горизонтальной плоскости. Технический результат изобретения состоит в повышении боевой эффективности танка. 4 з.п. ф-лы, 7 ил.
| Military Technology, 1994, № 10, с.82-86 | |||
| RU 2002199 C1, 30.10.1993 | |||
| ЛЕГКООБРАБАТЫВАЕМЫЕ, ВЫСОКОПРОЧНЫЕ, СТОЙКИЕ К ОКИСЛЕНИЮ Ni-Cr-Co-Mo-Al-СПЛАВЫ | 2014 |
|
RU2650659C2 |
| DE 3931098 A1, 04.04.1991 | |||
| Способ регенерации каркасных фильтровальных рукавов | 1972 |
|
SU388762A1 |
| Каталог “Оружие России” | |||
| - М.: АО “Милитэри Пэрэйд”, 1995, с.52 и 53. | |||

