Предлагаемая группа изобретений относится к области вооружения, а именно к способу и системам управления ракетами, вращающимися по углу крена.
Известны способ формирования команд управления на ракете, вращающейся по углу крена, и система управления ракетой [Патент России №2351875 от 10.04.09 г., МКИ8 F42B 15/01], выбранные в качестве прототипа. Способ формирования команд управления на ракете, вращающейся по углу крена, включающий декодирование принимаемых сигналов по курсу и тангажу, измерение и интегрирование скорости вращения ракеты по углу крена, при достижении которой заданной величины формируют устанавливающие импульсы, считаемое количество которых представляет собой 4-разрядное двоичное число, логические уровни которого преобразуют в импульсные сигналы, которыми из декодированных принимаемых сигналов формируют команды управления ракетой по курсу и тангажу в виде 16-ступечатой аппроксимации синусоиды и косинусоиды с амплитудами, соответствующими величинам декодированных сигналов, и периодом повторения, равным периоду вращения ракеты.
Известная система управления ракетой, использующая этот способ, содержит последовательно соединенные приемник и аппаратуру разделения каналов и декодирования по курсу и тангажу, а также датчик угловой скорости, соединенный с интегрирующим входом сбрасываемого интегратора, задающий вход которого подключен к задатчику углового интервала, устройство установки в исходное состояние соединено со входами установки в исходное состояние сбрасываемого интегратора и синус-косинусного преобразователя, счетный вход которого соединен с выходом сбрасываемого интегратора, выходы аппаратуры разделения каналов и декодирования по курсу и тангажу соединены соответственно с курсовым и тангажным входами синус-косинусного преобразователя, первый и второй выходы которого соединены соответственно с первым и вторым входами рулевого привода.
Далее по тексту последовательно соединенные приемник и аппаратура разделения каналов и декодирования по курсу и тангажу названы приемным трактом ["Основы радиоуправления" под ред. В.А.Вейцеля и Типугина В.Н. "Сов. радио", 1973 г., стр.247, рис.4.28]. Кроме того, как следует из описания известной системы управления (например, см. фиг.2 и 3), синус-косинусный преобразователь при постоянной величине декодированных сигналов по курсу Z и тангажу Y (частный случай) выполняет (в том числе) функцию синус-косинусного формирователя, которая используется в заявленном техническом решении.
Как следует из изложенного выше, известные способ формирования команд управления на ракете, вращающейся по углу крена, и система управления ракетой используют триггерные функции: счет количества импульсов с угловым интервалом следования 22,5°. При счете количества импульсов осуществляют их суммирование, в том числе и при изменении направления вращения ракеты по углу крена на противоположное.
Следовательно, недостатком известных способов формирования команд управления на ракете, вращающейся по углу крена, и системы управления ракетой является формирование ложных (дополнительных) импульсов при изменении направления вращения ракеты по крену, что не соответствует величине угла крена ракеты, а значит, ограничивает область применения, снижая эффективность управления ракетой.
Известные способ формирования линеаризированного сигнала и линеаризатор сигнала для его осуществления [Патент России №2282129 от 20.08.06 г., МКИ7 F41G 7/00] являются совместно с датчиком угла крена по выполняемой функции соответственно способом измерения угла крена на ракете, вращающейся по углу крена, и гироскопическим измерителем угла крена его реализующим, которые выбраны в качестве прототипа. В известном способе измерения угла крена на ракете, вращающейся по углу крена, с помощью гироскопического датчика угла крена формируют в каждый креновый период первую и вторую последовательности с нулевыми и единичными логическими уровнями, длительности которых равны угловому интервалу 180° и сдвинуты относительно друг друга на 90°, из которых формируют интервалы, соответствующие одной четверти кренового периода, измеряют во времени длительность текущего временного интервала, по которой выставляют величину размаха линеаризированного сигнала, соответствующую последующему временному интервалу, текущая величина которого в каждой четверти кренового периода (квадранте) соответствует величине угла крена ракеты.
Известный гироскопический измеритель угла крена ракеты, использующий этот способ (см. описание Патента России №2282129 от 20.08.06 г.), содержит гироскоп с двумя парами светодиод-фотодиод, в каждой из которых светодиод и фотодиод разделяют непрозрачным растром с прозрачной по окружности прорезью, длительностью, равной половине длины окружности, при этом центр растра закреплен на оси гироскопа, а первая и вторая пары светодиод-фотодиод установлены на корпусе гироскопа и сдвинуты относительно друг друга на 90°, выходы фотодиодов из первой и второй пары соединены соответственно с первым и вторым нагрузочными резисторами, а также с входами соответственно первого и второго пороговых устройств, выходы которых соединены соответственно с первым и вторым входами логической схемы исключающее ИЛИ, выход которой соединен с входом линеаризатора сигнала.
Недостатком известных способа измерения угла крена ракеты и гироскопического измерителя угла крена ракеты, его реализующим, является то, что сигнал величины угла крена ракеты формируют с учетом длительности предыдущей четверти крена, при котором образуется ошибка при изменении угловой скорости вращения ракеты по крену, что снижает точность измерения величины угла крена. Кроме того, известное техническое решение не функционирует при изменении направления вращения ракеты по углу крена, т.к. линеаризация сигнала производится по текущему времени, которое при изменении направления вращения не может изменить свой ход на обратный. Перечисленные выше недостатки снижают эффективность управления ракетой.
Известны способ преобразования импульсов на ракете, вращающейся по углу крена, для формирования команд управления на ней и синус-косинусный преобразователь системы управления ракетой, вращающейся по углу крена [Патент России №2351875 от 10.04.09 г., МКИ8 F42G 7/00], которые выбраны в качестве прототипа. Способ преобразования импульсов на ракете, вращающейся по углу крена, для преобразования команд управления на ней (с учетом описания), заключающийся в том, что осуществляют подсчет количества импульсов и формирование из них двоичного числа, изменяемого от 0 до 15 на угловом интервале 0°-360°, из логических уровней первого и третьего разрядов двоичного числа формируют первые импульсы, а из второго и третьего - вторые импульсы, которыми коммутируют команду управления ракеты по курсу с периодом повторения коэффициентов передачи 0,2; 0,56; 0,83; 0,98; 0,98; 0,83; 0,56 и 0,2, а по тангажу - 0,98; 0,83; 0,56; 0,2; 0,2; 0,56; 0,83 и 0,98, соответствующие угловым интервалам 0°-180°, 180°-360°, при этом соответствующим логическим уровнем четвертого разряда двоичного числа инвертируют в угловых интервалах 180°-360° команду управления ракеты по курсу, дополнительно из логических уровней третьего и четвертого разрядов двоичного числа формируют третьи импульсы, которые инвертируют в угловых интервалах 90°-270° команду управления ракеты по тангажу.
Известный синус-косинусный преобразователь, реализующий способ преобразования импульсов на ракете, вращающейся по углу крена, для преобразования команд управления на ней содержит счетчик импульсов, первый и третий выходы которого соединены с первым и вторым входами первой логической схемы исключающее ИЛИ, а второй и третий выходы - с первым и вторым входами второй логической схемы исключающее ИЛИ, при этом выходы первой и второй схем исключающее ИЛИ соединены соответственно с первым и вторым входами первого перемножителя, третий вход которого соединен с четвертым выходом счетчика импульсов, первый и второй входы второго перемножителя соединены с выходами первой и второй логических схем исключающее ИЛИ, при этом третий и четвертый выходы счетчика импульсов соединены соответственно с первым и вторым входами третьей логической схемы исключающее ИЛИ, выход которой соединен с третьим входом второго перемножителя, причем входами синус-косинусного преобразователя являются вход установки в исходное состояние счетчика импульсов, курсовой вход первого перемножителя и тангажный вход второго перемножителя, а выходами - выходы первого и второго перемножителей.
Как следует из известного технического решения, синус-косинусный преобразователь системы управления ракетой, вращающейся по углу крена, использует способ преобразования импульсов на ракете, при этом формируемые синусный и косинусный сигналы имеют амплитуды, равные величине декодированных сигналов, соответственно, по курсу и тангажу, т.е. модулируются по амплитуде. А при подаче вместо декодированных сигналов по курсу и тангажу на курсовой вход первого перемножителя и тангажный вход второго перемножителя, являющихся входами синус-косинусного преобразователя, например, напряжений от источника питания, на их синусном и косинусном выходах будут сигналы, аналогичные в заявленном техническом решении.
Таким образом, известный способ преобразования импульсов на ракете, вращающейся по углу крена, для формирования команд управления на ней также может выполнять функцию формирования синусного и косинусного сигналов. В соответствии с изложенным, способ преобразования импульсов на ракете, вращающейся по углу крена, для формирования команд управления на ней, далее назван способом формирования синусного и косинусного сигналов на ракете, вращающейся по углу крена, для формирования команд управления на ней. Аналогично и для синус-косинусного преобразователя названого синус-косинусным формирователем, что отмечалось ранее.
Недостатком известных способа формирования синусного и косинусного сигналов на ракете, вращающейся по углу крена, для формирования команд управления на ней и синус-косинусного формирователя, его реализующего, является то, что считываемое количество импульсов далее преобразуют в импульсные сигналы, которыми осуществляют преобразование команд управления, которые при изменении направления вращения ракеты по углу крена формируются ложными. Ложные команды управления формируются также из-за дополнительных импульсов, которые возникают при дрожании растра, разделяющего светодиоды и фотодиоды границей раздела свет - тень, например, при воздействии на ракету вибраций. Это снижает эффективность управления.
Задачей предлагаемой группы изобретений является обеспечение работоспособности при изменении направления вращения ракеты по углу крена, при повышении помехоустойчивости и точности, а в целом - повышение эффективности управления ракетой, вращающейся по углу крена.
Поставленная задача решается за счет того, что в способе формирования команд управления на ракете, вращающейся по углу крена, включающем декодирование принимаемых сигналов по курсу и тангажу и формирование двоичного числа, соответствующего величине угла крена ракеты, новым является то, что измеряют величину угла крена ракеты, формируемую в виде сигнала в n-разрядном коде Грея, который преобразуют в двоичное число, содержащее n-разрядов, логические уровни которого вырабатывают многоступенчатую аппроксимацию сигналов синусоиды и косинусоиды, формирующих из декодированных принимаемых сигналов команды управления ракетой соответственно по курсу и тангажу, при этом величину каждого дискретного значения в многоступенчатой аппроксимации сигналов синусоиды и косинусоиды образует соответствующая величина k-разрядного двоичного числа, а количество дискретных значений по углу в каждый период крена определяет величина n-разрядного двоичного числа, где n и k - заданные, требуемые количества разрядов в соответствующих двоичных числах.
Система управления на ракете, вращающейся по углу крена, реализующая этот способ, содержит приемный тракт, синус-косинусный формирователь и первый рулевой привод, новым является то, что она снабжена гироскопическим измерителем угла крена, логической схемой исключающее ИЛИ, преобразователем команд управления и вторым рулевым приводом, при этом курсовой и тангажные выходы приемного тракта соединены соответственно с первым и вторым входами преобразователя команд управления, адресные входы управления коммутациями синус-косинусного формирователя соединены с выходами соответственно d1… и dn-2 гироскопического измерителя угла крена, выход dn-1 которого соединен с адресным входом управления переключением синус-косинусного формирователя и первым входом логической схемы исключающее ИЛИ, второй вход которой соединен с выходом dn гироскопического измерителя угла крена, косинусный цифровой сигнал с первого выхода синус-косинусного формирователя и его знаковый разряд с выхода логической схемы исключающее ИЛИ соединены с третьим входом преобразователя команд управления, четвертый вход которого соединен с синусным цифровым сигналом со второго выхода синус-косинусного формирователя и его знаковым разрядом с выхода dn гироскопического измерителя угла крена, пятый и шестой входы преобразователя команд управления соединены с выходами соответственно первого и второго рулевых приводов, входы которых соединены соответственно первым и вторым выходами преобразователя команд управления.
В способе измерения угла крена ракеты, вращающейся по углу крена, включающем формирование гироскопическим датчиком угла крена в каждый креновый период первой и второй последовательностей логических уровней, длительности которых равны угловому интервалу 180°, новым является то, что формируют дополнительные последовательности логических уровней, начиная с третьей, в каждой из которых нулевые и единичные логические уровни имеют одинаковые длительности по угловой величине (φN), равные φN=360°/2N-1, где N=3, 4,…n - отсчеты дополнительных последовательностей логических уровней, при этом первую, вторую и дополнительные последовательности логических уровней образуют соответственно разряды qn, qn-1 и дополнительные qn-2, … и q1, формирующие число в n-разрядном коде Грея, причем во всех формируемых последовательностях логических уровней моменты переходов из нулевых уровней в единичные, ближайшие к величине угла крена ракеты, равной 0°, должны отставать по фазе от 0° на величину (A(φN), равную ΔφN=360°/2N, где N=1, 2, 3, … n - отсчетов последовательностей логических уровней, соответствующих qn, qn-1, qn-2, … и q1, которые преобразуют в двоичное n-разрядное число dn, dn-1 dn-2, ... и d1, соответствующее измеренной величине угла крена ракеты.
Гироскопический измеритель угла крена системы управления ракетой, содержащий первую логическую схему исключающее ИЛИ и гироскопический датчик угла крена, включающий гироскоп, на оси внешней рамки которого закреплен непрозрачный растр с прозрачными по окружности участками, и две пары светодиод-фотодиод, разделяемые растром и размещенные на корпусе гироскопа, выходы фотодиодов из первой и второй пары соединены соответственно с первым и вторым нагрузочными резисторами, новым является то, что он снабжен дополнительно третьей и четвертой парами светодиод-фотодиод, размещенными на корпусе гироскопа и разделяемые растром, четырьмя пороговыми устройствами, второй и третьей логическими схемами исключающее ИЛИ, при этом выходы первого, второго, третьего и четвертого фотодиодов из соответствующих пар соединены соответственно с первым, вторым, третьим и четвертым пороговыми устройствами, выходы третьего и четвертого фотодиодов соединены соответственно с третьим и четвертым нагрузочными резисторами, причем выходы второго, третьего и четвертого пороговых устройств соединены с первыми входами соответственно первой, второй и третьей логических схем исключающее ИЛИ, при этом выход первого порогового устройства и второй вход первой логической схемы исключающее ИЛИ являются выходом четвертого (старшего разряда) двоичного числа гироскопического измерителя угла крена системы управления ракетой, выходом третьего разряда двоичного числа которого являются выход первой логической схемы исключающее ИЛИ и второй вход второй логической схемы исключающее ИЛИ, выход второй логической схемы исключающее ИЛИ и второй вход третьей логической схемы исключающее ИЛИ являются выходом второго разряда двоичного числа гироскопического измерителя угла крена системы управления ракетой, первым выходным разрядом двоичного числа которого является выход третьей логической схемы исключающее ИЛИ.
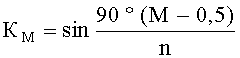
В способе формирования синусного и косинусного сигналов на ракете, вращающейся по углу крена, для формирования команд управления на ней, включающем формирование двоичного числа в параллельном виде, изменяемого в угловом интервале крена ракеты 0°-360°, новым является то, что двоичное число в параллельном виде формируют в виде n-разрядного, из которого выделяют 1, … и n-2 разряды, логические уровни которых в каждом квадранте углового интервала, начиная с 0°, выставляют соответствующие дискретные величины сигналов нарастания и спада, определяемые k-разрядным двоичным числом в параллельном виде, при этом логическими уровнями n-1 разряда двоичного числа и его инвертированными значениями формируют порядок чередования следования сигналов нарастания и спада, в результате которого вырабатывают дискретные цифровые величины синусоиды и косинусоиды, в качестве знаковых разрядов которых используют соответственно n-й разряд двоичного числа и этот же разряд, сдвинутый на 90°, при этом величина дискретов синусоиды и косинусоиды по углу крена равна 360о/n, а порядок их следования в каждом квадранте определяет значения дискретных амплитуд Км в соответствии с выражением
где М=1, 2, … 2n-2 - отсчеты дискретных значений в порядке их следования для сигналов нарастания и обратный отсчет для сигналов спада.
Синус-косинусный формирователь системы управления ракетой, содержащий формирователи синусоиды и косинусоиды, новым является то, что он снабжен М задатчиками чисел и логической схемой НЕ, при этом выходы а1 а2,... и аk первого, б1 б2,... и бk второго, … и м1 м2, … и мk М-го задатчиков чисел соединены соответственно с входами коммутаций сигналов формирователей синусоиды и косинусоиды, выход логической схемы НЕ соединен с первыми входами управления переключениями формирователей соответственно синусоиды и косинусоиды, причем входы управления коммутациями формирователей синусоиды и косинусоиды являются адресными входами управления коммутациями d1 ... и dn-2 синус-косинусного формирователя системы управления ракетой, адресным входом управления переключением dn-1 которого являются вторые входы управления переключениями формирователей соответственно синусоиды и косинусоиды, а также вход логической схемы НЕ, цифровые выходы формирователей синусоиды и косинусоиды являются соответственно первым и вторым выходами синус-косинусного формирователя системы управления ракетой.
При этом формирователь синусоиды выполнен в виде k мультиплексоров сигналов нарастания и первого переключателя сигналов, входы переключения А1 А2, … и Аk которого соединены с выходами соответственно первого, второго,... и k-го мультиплексоров сигналов нарастания, при этом первые а1 а2,... и аk , вторые б1 б2, … и бk, … и последние м1 м2, … и мk входы коммутаций сигналов из первого, второго, … и k-го мультиплексоров сигналов нарастания являются входами коммутаций формирователя синусоиды, входами управления коммутациями которого являются управляемые входы А1 … и Аn-2 первого, второго, … и k-го мультиплексоров сигналов нарастания, входы переключений В1, В2, … и Вk первого переключателя сигналов являются входами сигналов спада формирователя синусоиды, первый и второй входы управления переключениями которого являются соответственно входы управления А и В первого переключателя сигналов, а цифровым выходом формирователя синусоиды является цифровой выход первого переключателя сигналов.
Формирователь косинусоиды выполнен в виде k мультиплексоров сигналов спада и второго переключателя сигналов, входы переключения В1, В2, … и Вk которого соединены с выходами соответственно первого, второго,... и k-го мультиплексоров сигналов спада, при этом первые м1 м2,... и мk, предпоследние б1 б2, … и бk и последние а1 а2, … и аk входы коммутаций из первого, второго … и k-го мультиплексоров сигналов спада являются входами коммутаций формирователя косинусоиды, входами управления коммутациями которого являются управляемые входы А1, … и Аn-2 первого, второго, … и k-го мультиплексоров сигналов спада, входы переключений А1 А2, … и Аk второго переключателя сигналов являются входами сигналов нарастания формирователя косинусоиды, первый и второй входы управления переключениями которого являются соответственно входы управления В и А второго переключателя сигналов, а цифровым выходом формирователя косинусоиды является цифровой выход второго переключателя сигналов.
Заявленный способ формирования команд управления на ракете, вращающейся по углу крена, реализуется следующим образом. Декодируют принимаемые сигналы управления ракетой по курсу "Z" и тангажу "Y". Кроме того, формируют на ракете двоичное число, соответствующее величине угла крена ракеты.
Измеряют, например, гироскопическим измерителем угла крена величину угла крена ракеты, формируемую в виде n-разрядного сигнала в коде Грея. Преобразуют n-разрядный сигнал в коде Грея в двоичное n-разрядное число, логические уровни которого формируют многоступенчатую аппроксимацию сигналов синусоиды и косинусоиды. Сигналы синусоиды и косинусоиды формируют из декодированных принимаемых сигналов команды управления ракетой соответственно по курсу "Z" и тангажу "Y"
Величину каждого дискретного значения в многоступенчатой аппроксимации сигналов синусоиды и косинусоиды образует соответствующая величина k-разрядного двоичного числа, а количество дискретных значений по углу в каждый период крена определяет величина n-разрядного двоичного числа, где n и k - заданные, требуемые количества разрядов в соответствующих двоичных числах.
Таким образом, дискретные сигналы синусоиды и косинусоиды имеют постоянную (неизменяемую) амплитуду, при этом значения этих сигналов не зависят от направления вращения ракеты по углу крена. Кроме того, частота сигналов синусоиды и косинусоиды равна частоте вращения ракеты, которая может изменяться от нулевого значения (ракета не вращается) до максимально заданной.
Предлагаемое изобретение поясняется чертежами, приведенными на фиг.1, 2, 3, 4, 5 и 6. На фиг.1 представлена структурная электрическая схема системы управления ракетой, вращающейся по углу крена, где 1 - приемный тракт (ПТ); 2 - преобразователь команд управления (ПКУ); 3а и 3б - первый и второй рулевые приводы соответственно (РП1 и РП2); 4 - гироскопический измеритель угла крена (ГИУ); 5 - синус-косинусный формирователь (СКФ); 6 - логическая схема исключающее ИЛИ (ИСК); 7а, 7б, 7в и 7г - первый, второй, третий и четвертый блоки вычитания соответственно (БВ1, БВ2, БВ3 и БВ4); 8а, 8б, 8г и 8д - первый, второй, третий и четвертый сумматоры соответственно (C1, С2, С3 и С4); 9а и 9б - первый и второй триггерные устройства соответственно (ТУ1 и ТУ2); 10а, 10б, 10в, 10г, 10д, 10е, 10ж и 10з - первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой перемножители; 11а, 11б, 11в и 11г -первый, второй, третий и четвертый усилители мощности соответственно (УМ1, УМ2, УМ3 и УМ4); 12а, 12б, 12в и 12г - первая, вторая, третья и четвертая рулевые машинки соответственно (РМ1, РМ2, РМ3 и РМ4); 13а и 13б - первый и второй потенциометры обратной связи соответственно (ПОС1 и ПОС2); 14а и 14б - первый и второй усилители соответственно (У1 и У2).
В системе управления на ракете, вращающейся по углу крена, курсовой и тангажные выходы приемного тракта 1 соединены соответственно с первым и вторым входами преобразователя команд управления 2. Адресные входы управления коммутациями синус-косинусного формирователя 5 соединены с выходами соответственно d1, … и dn-2 гироскопического измерителя угла крена 4, выход dn-1 которого соединен с адресным входом управления переключением синус-косинусного формирователя 5 и первым входом логической схемы исключающее ИЛИ 6. Второй вход логической схемы исключающее ИЛИ 6 соединен с выходом dn гироскопического измерителя угла крена 4.
Косинусный цифровой сигнал с первого выхода синус-косинусного формирователя 5 и его знаковый разряд с выхода логической схемы исключающее ИЛИ 6 соединены с третьим входом преобразователя команд управления 2. Четвертый вход преобразователя команд управления 2 соединен с синусным цифровым сигналом со второго выхода синус-косинусного формирователя 5 и его знаковым разрядом с выхода dn гироскопического измерителя угла крена 4. Пятый и шестой входы преобразователя команд управления 2 соединены с выходами соответственно первого 3а и второго 3б рулевых приводов, входы которых соединены соответственно первым и вторым выходами преобразователя команд управления 2.
Приемный тракт 1 может быть выполнен аналогичному в прототипе, за исключением того, что выходные сигналы "Z" и "Y" приемного тракта - двоичное, например, параллельное число. Логическая схема исключающее ИЛИ 6, например, микросхема 564 ЛП2. Структурные электрические схемы гироскопического измерителя угла крена 4 и синус-косинусного формирователя 5 приведены соответственно на фиг.2 и фиг.5.
Структурные электрические схемы преобразователя команд управления 2, первого 3а и второго 3б рулевых приводов, приведенные в качестве примера выполнения на фиг.1, известны [патент России №2235969 от 03.12.02 г., МКИ7 F42B 15/01]. В этом известном устройстве формирования команд управления вращающейся вокруг продольной оси ракетой, приведенном на фиг.2 [см. патент России №2235969], все восемь модуляторов (названные умножителями в заявленном техническом решении) в цифровом виде могут быть выполнены на постоянных запоминающих устройствах, например, на микросхемах 556РТ7, адреса строк и столбцов которых являются первым и вторым цифровыми входами для двоичных чисел, где умножение производят табличным способом. Также цифровыми могут быть выполнены сумматоры и блоки вычитания.
Заявленная система управления ракетой, вращающейся по углу крена, реализующая способ управления ракетой, вращающейся по углу крена, приведенная на фиг.1, работает следующим образом. На вход приемного тракта 1 поступает электромагнитное излучение, например, используемое в системе командного радиоуправления, в соответствии с которым на его выходе выделяются сигналы (команды) управления ракетой по курсу "Z" и тангажу "Y". Эти сигналы управления, например, в двоичном параллельном коде (со знаком) поступают соответственно на первый и второй входы преобразователя команд управления 2.
Гироскопический измеритель угла крена 4 измеряет угол крена на ракете и формирует выходной сигнал в виде двоичного параллельного n-разрядного числа, например, для упрощения 4-разрядного. Логические уровни первого (младшего) d1, … и (n-2)-го dn-2 (в данном случае второго d2) разрядов двоичного числа с выходов гироскопического измерителя угла крена 4 поступают на соответствующие адресные входы управления коммутацией синус-косинусного формирователя 5. Логические уровни (n-1)-гo dn-1 (в данном случае третьего d3) разряда двоичного числа с выхода гироскопического измерителя угла крена 4 поступают на адресный вход управления переключением синус-косинусного формирователя 5. При этом на первом и втором выходах синус-косинусного формирователя 5 формируются два двоичных k-разрядных параллельных числа, величины которых изменяются по законам изменения соответственно косинусоиды и синусоиды (без знакового разряда), которые поступают соответственно на третий и четвертый входы преобразователя команд управления 2.
При этом (n) разряд (в данном случае четвертый d4) двоичного числа с выхода гироскопического измерителя угла крена 4, являющийся знаковым разрядом сигнала синусоиды, также поступает на четвертый вход преобразователя команд управления 2.
Одновременно третий (d3) и четвертый (d4) разряды двоичного числа с выхода гироскопического измерителя угла крена 4 поступают на первый и второй входы логической схемы исключающее ИЛИ 6, на выходе которой формируется знаковый разряд для сигнала косинусоиды, т.е. сигнал сдвинутый по фазе на 90° относительно четвертого разряда. Сигнал с выхода логической схемы исключающее ИЛИ 6 поступает на третий вход преобразователя команд управления 2.
Далее осуществляют преобразование команд управления, учитывающих вращение ракеты по углу крена φ относительно не вращающейся системы координат, например, пункта управления (при величине начального угла фазирования, равной 0°) посредством первого 10а, второго 10б, третьего 10в, четвертого 11г перемножителей вместе со вторым сумматором 8б и третьим блоком вычитания 7в в соответствии с формулами


где величины cosφ и sinφ равны двоичным числам на соответствующих третьем и четвертом входах преобразователя команд управления 2.
С выходов второго сумматора 8б и третьего блока вычитания 7в сигналы поступают на входы соответственно первого 3а и второго 3б рулевых приводов, которые являются первыми входами первого 8а и третьего 8г сумматоров. На вторые входы этих сумматоров поступают сигналы с потенциометров обратной связи соответственно с первого 13а и второго 13б, движки которых кинематически связаны с рулями. Выходы первого 8а и третьего 8г сумматоров подключены к входам соответственно первого 9а и второго 9б триггерных устройств (триггеры Шмитта). Далее сигнал в каждом канале усиливается одним из двух ключевых противофазных усилителей мощности первым 11а и вторым 11б, а также третьим 11в и четвертым 11г, в зависимости от фазы поступающего сигнала.
С усилителя мощности сигнал поступает в обмотку соответствующего управляющего электромагнита, который управляет работой соответствующих рулевых машинок первой 13а, второй 13б, третьей 13в и четвертой 13г, обеспечивающими пропорциональность угла отклонения руля амплитуде входного сигнала. Вследствие наличия положительной обратной связи и триггерного устройства рули работают в автоколебательном режиме.
Таким образом, на выходах первого 13а и второго 13б потенциометров обратной связи формируется информация об отклонениях рулей, которая используется для получения автоколебаний в контуре каждого рулевого привода.
Кроме того, эту информацию используют в качестве обратной связи по огибающей выходных сигналов первого и второго рулевых приводов. Для этого осуществляют ее преобразование, при котором сигналы с выходов первого 13а и второго 13б потенциометров обратной связи поступают на первые входы соответственно пятого 10д, шестого 10е, седьмого 10ж и восьмого 10з перемножителей. При этом на вторые входы пятого 10д и восьмого 10з поступает величина cosφ, а на вторые входы шестого 10е и седьмого 10ж перемножителей - величина sinφ. Вместе с четвертым блоком вычитания 7г и четвертым сумматором 8г осуществляют преобразование огибающих выходных сигналов из каждого рулевого привода из вращающейся, связанной с ракетой системы координат, в не вращающуюся систему координат, например, пункта управления (при величине начального угла фазирования, равной 0°), в соответствии с формулами.


где Uδ1 и Uδ2 - сигналы с выходов потенциометров обратной связи первого 3а и второго 3б рулевых приводов.
На первом 7а и втором 7б блоках вычитания осуществляется сравнение сигналов управления ракетой с сигналами с выходов соответственно первого 14а и второго 14б усилителей.
Таким образом, преобразователь команд управления 2, первый 3а и второй 3б рулевые приводы функционируют так же, как и в известном устройстве [патент России №2235969 от 03.12.02 г., МКИ7 F42B 15/01].
Заявленный способ измерения угла крена ракеты, вращающейся по углу крена, реализуется следующим образом. Формируют гироскопическим датчиком угла крена с оптронными парами светодиод-фотодиод, разделенными растром, в каждый креновый период (угловой интервал крена 0°-360°) первую и вторую последовательности логических уровней (нулевые и единичные). Длительности каждой из этих двух последовательностей равны угловому интервалу 180°.
Формируют дополнительные последовательности логических уровней, начиная с третьей, в каждой из которых нулевые и единичные логические уровни имеют одинаковые длительности по угловой величине (φN), равные

где N=3, 4 … n - отсчеты дополнительных последовательностей логических уровней.
Как следует из выражения (5), Nмакс=n. При этом первую, вторую и дополнительные последовательности логических уровней образуют соответственно разряды qn (старший), qn-1 и дополнительные qn-2, … q1 (младший), формирующие n-разрядное число в коде Грея. Кроме того, во всех формируемых последовательностях логических уровней моменты переходов из нулевых уровней в единичные (фронты нарастания), ближайшие к величине угла крена ракеты, равной 0°, должны отставать по фазе от 0° на величину (ΔφN), равную

где N=1, 2, 3, … n - отсчеты последовательностей логических уровней, соответствующих qn, qn-1 qn-2, … и q1.
Как следует из выражения (6), в моменты переходов из нулевых уровней в единичные, ближайшие к величине угла крена ракеты, равной 0°, первой, второй, третьей, четвертой, пятой и т.д. последовательностей логических уровней, они отстают от величины угла крена ракеты 0° (по фазе) соответственно на 180°, 90°, 45°, 22,5°, 11,25° и т.д.
Таким образом, например, для n=4 первую и вторую последовательности логических уровней можно представить в виде разрядов чисел в коде Грея соответственно q4 и q3 (см. таблицу 1). Дополнительно формируют третью (соответствующую разряду q2) и четвертую (соответствующую разряду q1) последовательности с нулевыми и единичными логическими уровнями, угловые длительности которых φ3, φ4 равны соответственно 90° и 45°.
Причем момент перехода из нулевого уровня в единичный первой последовательности q4 (старший разряд) отстает от величины угла крена ракеты 0° (по фазе) на 180°, второй последовательности q3 - на 90°, третьей q2 - на 45°, четвертой q1 (младший разряд) - на 22,5°. Следует отметить, что первая q4 и вторая q3 последовательности при изменении угла крена ракеты в интервале 0°-360° имеют всего один фронт нарастания.
Преобразуют n-разрядное число (например, четырехразрядное) из кода Грея в n-разрядное двоичное число (например, четырехразрядное), каждому разряду которого соответствуют значения d4, d3, d2 и d1 (см. таблицу 1), где d4 - старший разряд, a d1 - младший.
Из второго столбца табл.1 следует, что при переходе от одного числа к следующему в коде Грея изменяется всегда только один разряд. Таким образом, два числа, следующих непосредственно друг за другом, отличаются значением только одного из разрядов. Благодаря этому ошибка не может превысить единицу младшего разряда.
Следовательно, при сильной вибрации ракеты и возникновении колебаний растра в момент изменения в коде Грея логического уровня из нулевого в единичный (либо наоборот) может происходить лишь кратковременное изменение информации на единицу младшего разряда.
Как следует из изложенного выше, а также далее по тексту начало нумерации последовательностей логических уровней начинается со старшего разряда числа, а начало нумерации разрядов - с младшего разряда.
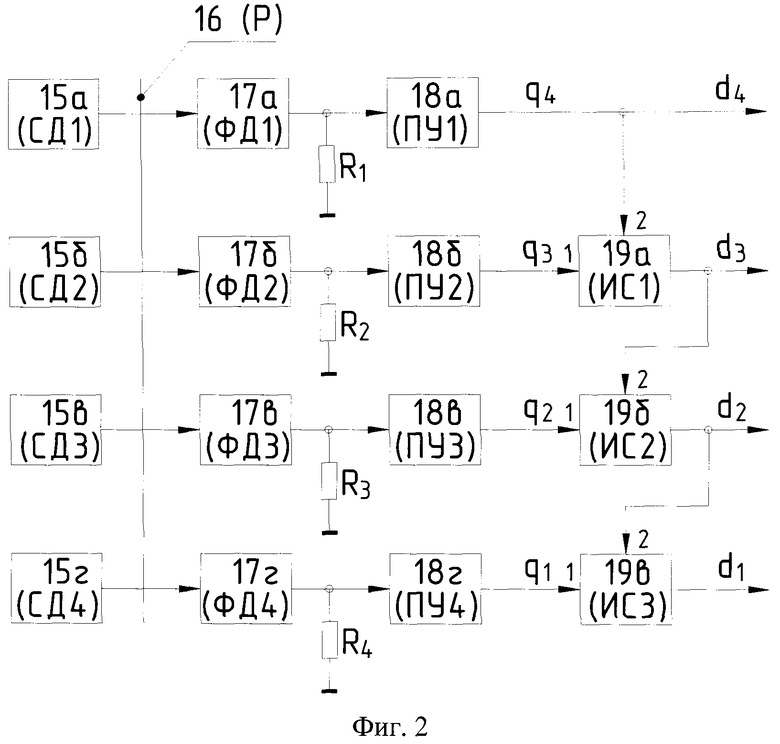
На фиг.2 представлена структурная электрическая схема гироскопического измерителя угла крена, где 15а, 15б, 15в и 15г - светодиоды оптронных пар соответственно (СД1, СД2, СД3 и СД4); 16 - растр (Р); 17а, 17б, 17в и 17г - фотодиоды оптронных пар соответственно (ФД1, ФД2, ФД3 и ФД4); 18а, 18б, 18в и 18г - пороговые устройства соответственно (ПУ1, ПУ2, ПУ3 и ПУ4); 19а, 19б и 19в - логические схемы исключающее ИЛИ соответственно (ИС1, ИС2 и ИС3).
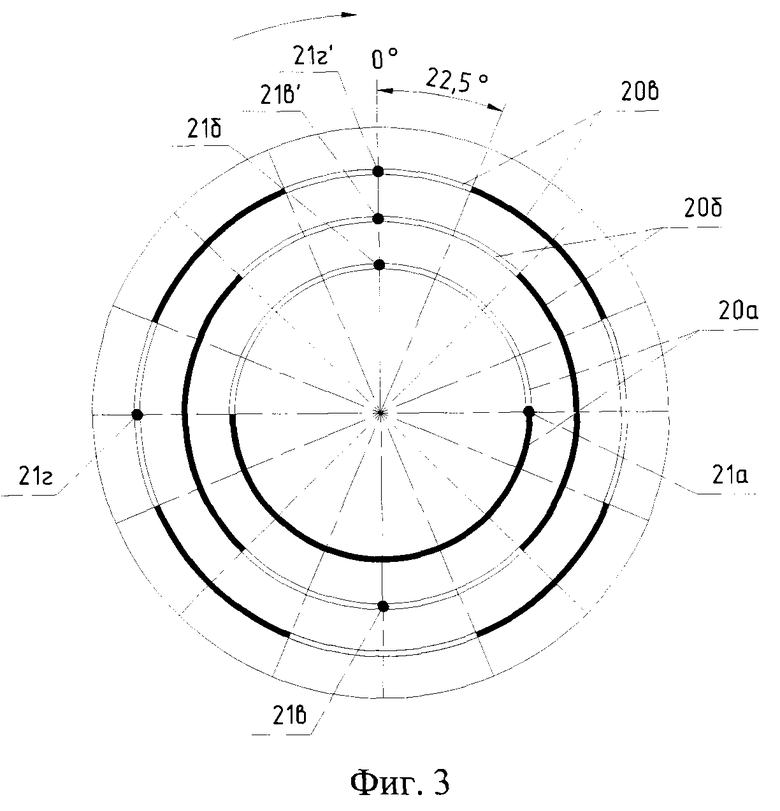
На фиг.3 приведен растр 16, где 20а, 20б и 20в - соответственно 1, 2 и 3 дорожки; 21а, 21б, 21в и 21г - первый (основной) вариант раположения оптронных пар; 21а, 21б, 21в' и 21 г' - второй вариант расположения оптронных пар.
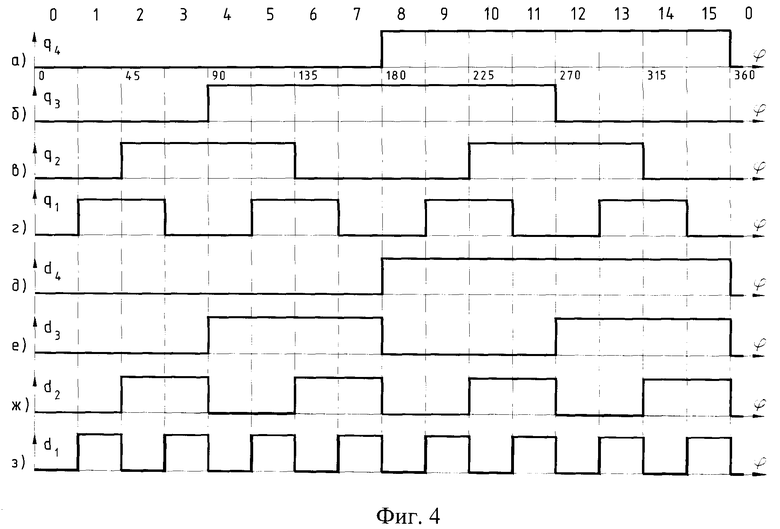
На фиг.4 приведены эпюры сигналов гироскопического измерителя угла крена, где представлены "а", "б", "в" и "г" - сигналы на выходах первого 18а, второго 18б, третьего 18в и четвертого 18г пороговых устройств, которые соответствуют разрядам q4, q3, q2 и q1 (от старшего разряда к младшему) числа в коде Грея; "д", "е", "ж" и "з" - сигналы соответственно на втором входе первой логической схемы исключающее ИЛИ 19а, на выходах первой 19а, второй 19б и третьей 19в логических схем исключающее ИЛИ, которые соответствуют разрядам d4, d3, d2 и d1 (от старшего разряда к младшему) числа в двоичном коде.
Гироскопический измеритель угла крена содержит гироскопический датчик угла крена, включающий гироскоп, на оси внешней рамки которого закреплен непрозрачный растр 16 с прозрачными по окружности участками и две пары светодиод-фотодиод 15а, 17а и 15б, 17б, разделяемые растром 16 и размещенные на корпусе гироскопа. Выходы фотодиодов из первой 17а и второй 17б пар соединены соответственно с первым R1 и вторым R2 нагрузочными резисторами. Третья 15в, 17в и четвертая 15г, 17г пары светодиод-фотодиод, разделяемые растром 16, размещены на корпусе гироскопа. Выходы первого 17а, второго 17б, третьего 17в и четвертого 17г фотодиодов из соответствующих пар соединены соответственно с первым 18а, вторым 18б, третьим 18в и четвертым 18г пороговыми устройствами. Выходы третьего 17в и четвертого 17г фотодиодов соединены соответственно с третьим R3 и четвертым R4 нагрузочными резисторами. Выходы второго 18б, третьего 18в и четвертого 18г пороговых устройств соединены с первыми входами соответственно первой 19а, второй 19б и третьей 19в логических схем исключающее ИЛИ. При этом выход первого порогового устройства 18а соединен со вторым входом первой логической схемы исключающее ИЛИ 19а. Вторые входы второй 19б и третьей 19в логических схем исключающее ИЛИ соединены с выходами соответственно первой 19а и второй 19б логических схем исключающее ИЛИ.
Гироскоп, не приведенный на фиг.2 и 3, и растр 16 выполнены аналогично прототипу (патент России №2282129 от 20.08.06 г., МКИ7 F41G 7/00). При этом форма растра 16, например, окружность, на которой расположены три дорожки с разными радиусами с прозрачными и непрозрачными участками. На первой (внутренней) дорожке 20а расположены первая 21а и вторая 21б оптронные пары соответственно первые светодиод 15а - фотодиод 16а и вторые светодиод 15б - фотодиод 17б. На второй 20б и третьей 20в дорожках расположены соответственно третья 21в и четвертая 21г оптронные пары соответственно третьи светодиод 15в - фотодиод 17в и четвертые светодиод 15г- фотодиод 17г.
При этом третья оптронная пара 21в или 21в' может быть расположена на второй дорожке 20б, в соответствии с их нумерацией (два варианта расположения). Четвертая оптронная пара 21г или 21г' может быть расположена на третьей дорожке 20в, в соответствии с их нумерацией (также два варианта). Кроме того, как видно из рисунка растра (фиг.3), для четвертой пары светодиод 15 - фотодиод 17, возможны еще два дополнительных варианта размещения. Причем черной (одинарной) линией изображены прозрачные участки дорожек растра, которым соответствует высокий уровень амплитуды импульсного сигнала на выходах фотодиодов, а светлой (двойной) - непрозрачные, которым соответствует низкий уровень, при этом растр условно вращается относительно оптронных пар по часовой стрелке (растр неподвижен, вращается по крену ракета с оптронными парами).
Поскольку фронты нарастания последовательностей импульсов (логических уровней) на выходах фотодиодов отстают по фазе от величины угла крена ракеты 0° на величину для первой оптронной пары 90°+90°=180° (q4), для второй - 90° (q3), для третьей - 45° (q2) и для четвертой на 22,5° (q1), то на первой дорожке непрозрачные и прозрачные участки чередуются в соответствии с изменением старших разрядов числа в коде Грея (q4 и q3), на второй - в соответствии с разрядом q2, на третьей - в соответствии с разрядом q1 согласно таблице 1. При этом каждому из 16-ти дискретных значений четырехразрядного числа соответствует 360о/16=22,5° угловой величины дорожки (окружности).
Первый 15а, второй 15б, третий 15в и четвертый 15г светодиоды, а также соответствующие им первый 17а, второй 17б, третий 17в и четвертый 17г фотодиоды, разделяемые дорожками растра, расположены на корпусе гироскопа. Пороговые устройства 18а, 18б, 18в и 18г, например, триггеры Шмитта. Первая 19а, вторая 19б и третья 19в логические схемы исключающее ИЛИ, например, микросхемы 564 ЛП2.
Гироскопический измеритель угла крена для формирования команд управления на ракете, приведенный на фиг.2, работает следующим образом. Импульсы фототока с выходов фотодиодов 17а, 17б, 17в и 17г, протекающие через соответствующие резисторы R1-R4, преобразуются на них в соответствующие напряжения, представляющие собой два уровня: световой и темновой, последовательности которых задаются растром 16, прерывающим световой поток от светодиодов 15а, 15б, 15в и 15г к фотодиодам 17а, 17б, 17в и 17г, соответственно. Световой и темновой уровни сигналов поступают соответственно на входы первого 18а, второго 18б, третьего 18в и четвертого 18г пороговых устройств, формирующих из них сигналы с логическими уровнями.
На выходе первого порогового устройства 18а формируется старший разряд (q4) кодовой последовательности четырехразрядного кода Грея, логические уровни которого приведены на эпюре "а" (фиг.4). На выходе второго порогового устройства 18б (эпюра "б" на фиг.4) - разряд q3, на выходе третьего порогового устройства 18в (эпюра "в" на фиг.4) - разряд q2 и на выходе четвертого порогового устройства 18г (эпюра "г" на фиг.4) - разряд q1.
С выходов второго 18б, третьего 18в и четвертого 18г пороговых устройств логические уровни сигналов поступают на первые входы соответственно первой 19а, второй 19б и третьей 19в логических схем исключающее ИЛИ. На второй вход первой логической схемы исключающее ИЛИ 19а поступает сигнал с выхода первого порогового устройства 18а. На второй вход второй логической схемы исключающее ИЛИ 19б поступает сигнал с выхода первой логической схемы исключающее ИЛИ 19а. На второй вход третьей логической схемы исключающее ИЛИ 19в поступает сигнал с выхода второй логической схемы исключающее ИЛИ 19б.
Таким образом, на выходах первой 19а, второй 19б и третьей 19в логических схем исключающее ИЛИ формируются логические уровни двоичного числа, соответствующие его разрядам соответственно d3, d2 и d1. Причем логические уровни его старшего разряда d4 совпадают с логическими уровнями старшего разряда числа в коде Грея q4. При этом осуществляется преобразование четырехразрядного кода Грея в четырехразрядный двоичный код (см. У.Титце, К.Шенк «Полупроводниковая схемотехника», М., Мир, 1982 г., стр.326, рис.19.12).
Как следует из изложенного, выше приведено выполнение гироскопического измерителя угла крена на ракете, вращающейся по углу крена, при количестве разрядов n=4. Однако число разрядов при увеличении n ничем не ограничивается, поскольку при преобразовании кода Грея в двоичный код увеличивается лишь количество логических схем исключающее ИЛИ на соответствующее увеличение n.
Поскольку при вращении ракеты в одну сторону двоичное число на выходе преобразователя кода увеличивается, а в обратную - уменьшается, то независимо от направления вращения ракеты на траектории полета, в том числе при его изменении в пределах одного оборота, происходит однозначное определение величины угла крена ракеты.
Заявленный способ формирования синусного и косинусного сигналов на ракете, вращающейся по углу крена, для формирования команд управления на ней реализуется следующим образом. Формируют двоичное число в параллельном виде, изменяемое в угловом интервале крена ракеты 0°-360°. Двоичное число в параллельном виде формируют в виде n-разрядного, из которого выделяют 1 (младший), … и n-2 разряды, логические уровни которых в каждом квадранте углового интервала, начиная с 0°, выставляют соответствующие дискретные величины сигналов нарастания и спада, определяемые k-разрядным двоичным числом в параллельном виде.
Например, при n=4 каждому разряду двоичного числа соответствуют значения d4, d3, d2 и d1 (см. приведенную таблицу 2), где d4 - старший разряд, a d1 - младший.
Поскольку за один оборот ракеты по углу крена в данном случае формируется 16 значений двоичного числа (см. второй столбец таблицы 2), то каждое изменение на дискретную величину соответствует приращению (увеличению) или уменьшению угла крена ракеты на 360°/16=22,5°, а в общем случае 360°/2n. Причем в каждом квадранте изменения двоичного числа его младшие разряды (их логические уровни) d2 и d1 формируют четыре k-разрядных двоичных числа, имеющие разные значения (приведенные в третьем и четвертом столбцах таблицы 2 в десятичном коде).
Таким образом, используя логические уровни d2 и d1, в каждом квадранте углового интервала 0°-360° формируют одновременно сигналы нарастания (увеличения) и спада (уменьшения), дискретные величины которых задают в виде следования соответствующих значений двоичных чисел (К), приведенных соответственно в третьей и четвертой колонках таблицы 2 (в десятичном коде). Эти четыре дискретных значения задают в виде следования соответствующих величин k-разрядных двоичных чисел.
Следовательно, значения дискретных величин двоичных чисел (Км), можно представить, например, в виде нормированных величин в десятичном коде, что позволяет вычислять их как функцию синуса среднего значения каждой длительности углового интервала (дискрета) φМ для каждого квадранта:



где М=1, 2, … 2n-2 - отсчеты дискретных значений φМ в порядке их следования для сигналов нарастания и обратный отсчет для сигналов спада.
Например, для n=4 Ммакс=22=4, при этом Км имеет четыре дискретных значения, для n=5 Ммакс=23=8, при этом Км имеет восемь дискретных значений и т.д.
Причем для n=4 
Для n=5 φ1=5,625°; φ2=16,875°; φ3=28,125°; φ4=39,375°; φ5=50,625°; φ6=61,875°; φ7=73,125° и φ8=84,375°. Соответственно, К1=sin φ1=0,098; К2=sin φ2=0,29; К3=sin φ3=0,471; К4=sin φ4=0,634; К5=sin φ5=0,773; К6=sin φ6=0,882; К7=sin φ7=0,957 и К8=sin φ8=0,995.
Для построения сигналов синусоиды и косинусоиды используют также логические уровни n-1 разряда двоичного числа dn-1 (при n=4 - d3) и их инвертированные величины. Этими логическими уровнями осуществляют соответствующий порядок чередования переключений сигналов нарастания и спада. При этом сигнал синусоиды формируют при подключении вначале сигнала нарастания из третьего столбца, т.е. четырех значений величин К1 К2, К3 и К4, а затем сигнала спада из четвертого столбца, формируемого значениями величин К4, К3, К2 и К1 и т.д. Сигнал косинусоиды формируют при подключении вначале сигнала спада из четвертого столбца, соответствующего значениям 0, 1, 2 и 3 десятичного кода из первого столбца (таблица 2), а затем сигнала нарастания из третьего столбца, соответствующего значениям 4, 5, 6, 7 (из первого столбца) и т.д. В результате такого подключения с чередованием этих сигналов вырабатывают k-разрядные двоичные числа сигналов синусоиды и косинусоиды (без знаков).
Следовательно, сформированные неполные цифровые сигналы синусоиды и косинусоиды (без знака) имеют одинаковые постоянные амплитуды, при этом величина этих амплитуд может быть и не нормированной, т.е. отличной от единицы.
В качестве знакового разряда (как отмечалось ранее) для сигнала синусоиды используют n-й (dn) разряд двоичного числа (при n=4 - d4), а для сигнала косинусоиды - этот же разряд, логические уровни которого сдвинуты по фазе на 90°.
Таким образом, как следует из изложенного выше, выбор заданного количества дискретных значений М (Ммакс=2n-2) и количество разрядов k в величинах двоичных чисел К в каждом квадранте можно уменьшить, либо увеличить, т.к. они задают точность формирования сигналов синусоиды и косинусоиды.
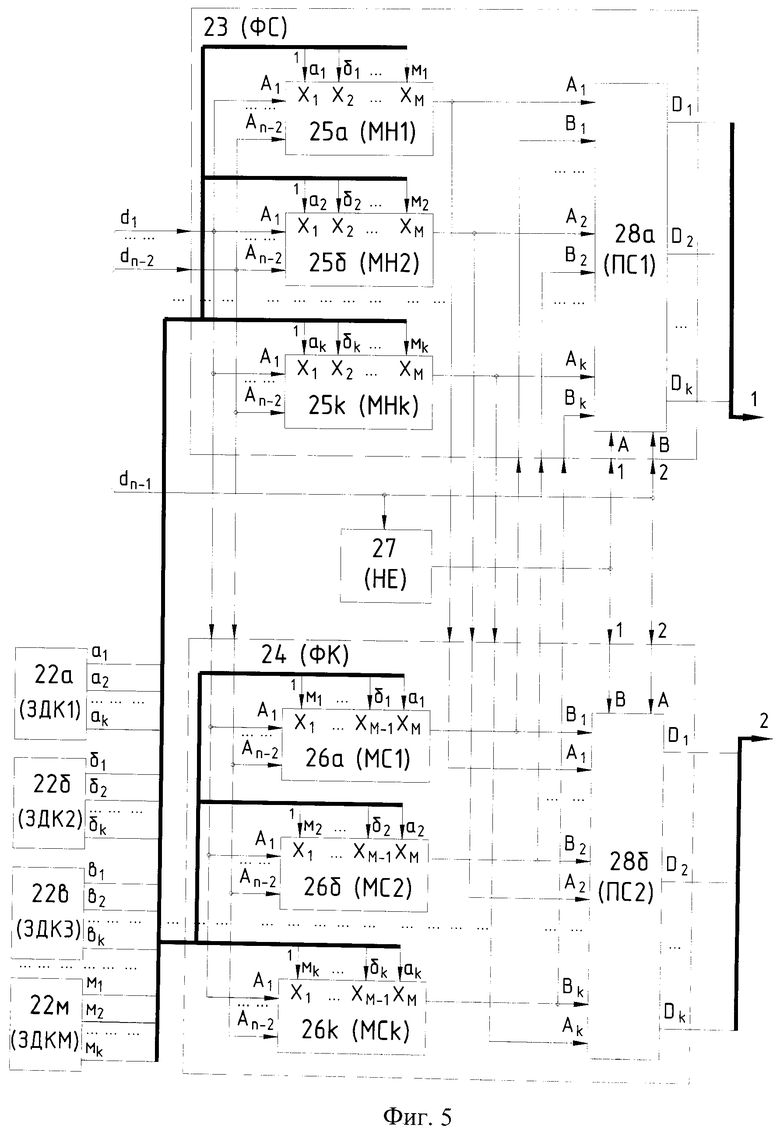
На фиг.5 представлена структурная электрическая схема синус-косинусного формирователя системы управления ракетой, где 22а, 22б, 22в, … и 22м - первый, второй, третий, … и м-й (максимальный) задатчики чисел соответственно (3ДК1, 3ДК2, 3ДК3, … и 3ДКМ; 23 - формирователь синусоиды (ФС); 24 - формирователь косинусоиды (ФК); 25а, 25б,... и 25k - первый, второй,... и k-й мультиплексоры сигналов нарастания (МН1, МН2, … и МНk); 26а, 26б, … и 26k - первый, второй, … k-й мультиплексоры сигналов спада (MC1, МС2,... и MCk); 27 - логическая схема НЕ (НЕ); 28а и 28б - первый и второй переключатели сигналов соответственно (ПС1 и ПС2).
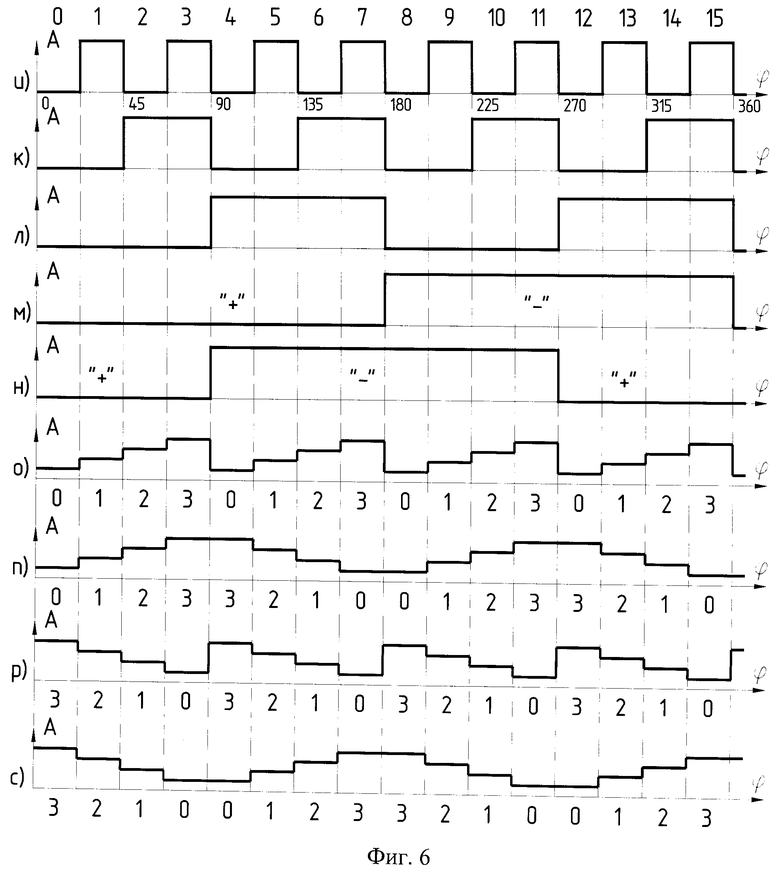
На фиг.6 приведены эпюры сигналов, необходимые для пояснения функционирования преобразователя импульсов, где представлены: "и", "к", "л" и "м" - сигналы на первом, втором, третьем и четвертом выходах (соответственно первого d1, второго d2, третьего d3 и четвертого d4 разрядов двоичного параллельного числа) гироскопического измерителя угла крена 4 (при n=4); "н" - сигнал на выходе логической схемы исключающее ИЛИ 6; "о" - цифровой k-разрядный сигнал (двоичное число) на выходах мультиплексоров нарастания 25а, 25б, … и 25k (в аналоговом виде); "n" - цифровой k-разрядный сигнал (двоичное число) на выходах формирователя синусоиды 23 (без знака в аналоговом виде); "р" - цифровой k-разрядный сигнал (двоичное число) на выходах мультиплексоров спада 26а, 26б … 26k (в аналоговом виде); "с" - цифровой k-разрядный сигнал (двоичное число) на выходах формирователя косинусоиды 24 (без знака в аналоговом виде).
В синус-косинусном формирователе системы управления ракетой (фиг.5) выходы а1 а2,... и аk первого 22а, б1 б2,... и бk второго 22б, … и м1 м2, … и мk м-го 22м задатчиков чисел соединены с соответствующими входами коммутаций формирователей синусоиды 23 и косинусоиды 24. Выход логической схемы НЕ 27 соединен с первыми входами управления переключениями формирователей соответственно синусоиды 23 и косинусоиды 24. При этом входы управления коммутациями формирователей синусоиды 23 и косинусоиды 24 являются адресными входами управления коммутациями d1 … и dn-2 синус-косинусного формирователя 5, адресным входом управления переключением dn-1 которого являются вторые входы управления переключениями формирователей соответственно синусоиды 23 и косинусоиды 24, а также вход логической схемы НЕ 27. Цифровые выходы формирователей синусоиды 23 и косинусоиды 24 являются соответственно первым и вторым выходами синус-косинусного формирователя 5.
Мультиплексоры сигналов нарастания 25а, 25б, … и 25k, а также сигналов спада 26а, 26б, … и 26k, например, для коммутации 2-разрядного двоичного числа (22) микросхемы 564КП1, где А1 и А2 -управляемые входы, а Х1 Х2, Х3 и Х4 соответственно 1, 2, 3 и 4 входы коммутации, а выход X (например, используется один канал мультиплексора 564КП1). Для коммутации 3-разрядного двоичного числа (23) - микросхема 564КП2, где А1 А2, и А3 (в общем случае А1, … и Аn-2) - управляемые входы, X1, Х2, Х3, … и Х8 (в общем случае Х1, … и Хм) - входы коммутации.
Первый 28а и второй 28б переключатели сигналов, например, микросхемы 564ЛС2 [В.А.Шило "Популярные цифровые микросхемы", Москва", "Радио и связь", 1987 г., стр.209, рис.212], каждая из которых пропускает слово А1-А4, либо В1-В4 на ее выход. При этом слова А1-А4 и В1-В4 можно наращивать (путем наращивания этих микросхем), например, соответственно A1-А8 и B1-В8 (в общем случае A1-Ak и В1-Bk), а входы на которые поступают эти слова являются соответствующими входами переключения. Управления разрешением пропускания этих слов осуществляют два сигнала с соответствующими логическими уровнями на входах А и В - входы управления.
Первый 22а, второй 22б, третий 22в … м-й 22м задатчики чисел (например, при количестве разрядов в двоичном числе n=4) определяют количество дискретных значений 24=16 в течение измерения угла крена ракеты от 0° до 360° и выполнены в виде электрических шин, имеющих сигналы с логическими уровнями соответственно нуль и единица. Эти шины формируют k-разрядные двоичные числа в параллельном виде (без знака), которые для первого задатчика числа 22а соответствуют десятичному числу, например 0,2. Второй 22б, третий 22в и четвертый 22г (на фиг.5 ему соответствует приведенный 22м) задатчики чисел формируют числа соответственно 0,56; 0,63 и 0,98. Эти четыре числа могут быть и иными, но обязательно пропорциональными приведенным выше.
Таким образом, количество задатчиков чисел должно быть равно величине двоичного числа, образуемого n-2 разрядами, являющимися частью двоичного n-разрядного числа с выхода гироскопического измерителя угла крена ракеты 1. Например, для n=4 количество задатчиков чисел равно 22=4, для n=5 равно 23=8 и т.д.
При этом формирователь синусоиды 23 выполнен в виде к мультиплексоров сигналов нарастания 25а, 25б, … и 25k, а также первый переключатель сигналов 28а, входы переключения А1, А2, … и А3 которого соединены с выходами соответственно первого 25а, второго 25б, … и k-го 25k мультиплексоров сигналов нарастания, при этом первые (X1) а1, а2, … и аk; вторые (Х2) б1 б2, … и бk, … и последние (Хм) м1 м2, … и мk входы коммутации из первого 25а, второго 25б, … и k-го 25k мультиплексоров сигналов нарастания являются входами коммутаций формирователя синусоиды 23, входы управления коммутациями которого являются управляемые входы А1, … и Аn-2 первого 25а, второго 25б, … и k-ого 25k мультиплексоров сигналов нарастания, входы переключений В1 В2, … и Вk первого переключателя сигналов 28а являются входами сигналов спада формирователя синусоиды 23, первый и второй входы управления переключениями которого являются соответственно входами управления А и В первого переключателя сигналов 28а, а цифровым выходом формирователя синусоиды 23 является цифровой выход первого переключателя сигналов 28а.
Формирователь косинусоиды 24 выполнен в виде k мультиплексоров сигналов спада 26а, 26б, … и 26k, а также второй переключатель сигналов 286, входы переключения В1 В2, … и Вk которого соединены с выходами соответственно первого 26а, второго 26б, … и k-го 26k мультиплексоров сигналов спада, при этом первые (X1) м1 м2, … и мk; … предпоследние (Xм-1) б1 б2, … и бk, и последние (Хм) а1 а2, … и аk входы коммутации сигналов из первого 26а, второго 26б, … и k-го 26k мультиплексоров сигналов спада являются входами коммутации формирователя косинусоиды 24, входами управления коммутациями которого являются управляемые входы А1, … и Аn-2 первого 26а, второго 26б, … и k-го 26k мультиплексоров сигналов спада, входы переключений А1, А2, … и Аk второго переключателя сигналов 28б являются входами сигналов нарастания формирователя косинусоиды 24, первый и второй входы управления переключениями которого являются соответственно входами управления В и А второго переключателя сигналов 28б, а цифровым выходом формирователя косинусоиды 24 является цифровой выход второго переключателя сигналов 28б.
Синус-косинусный формирователь системы управления ракетой, реализующий способ формирования синусного и косинусного сигналов на ракете, вращающейся по углу крена, для формировании команд управления на ней, приведенный на фиг.5, работает следующим образом.
Разряды двоичного числа, например при n=4 d2 и d1 (младший разряд) с выходов гироскопического измерителя угла крена 4, логические уровни которых приведены на эпюрах "и" и "к" фиг.6, поступают на адресные входы управления коммутациями (соответствующие входы d2 и d1 синус-косинусного формирователя 5). Данные входы являются входами управления коммутациями формирователей синусоиды 23 и косинусоиды 24, а значит управляемыми входами А1 и А2 мультиплексоров сигналов нарастания 25а, 25б, … и 25k (формирования синуса) и спада 26а, 26б, … и 26k (формирования косинуса). При этом разряды d2 и d1 формируют двоичное число, имеющее четыре значения.
Разряды первого двоичного (в параллельном виде) числа К1, величина которого равна, например, 0,2 (в десятичном коде), с выходов а1 а2, … и аk первого задатчика 22а поступают на первые коммутируемые входы мультиплексоров сигналов нарастания 25а, 25б, … и 25k. Причем младший разряд двоичного числа a1 следует с первого выхода задатчика числа 22а и поступает на первый коммутируемый вход X1, со второго его выхода - на первый коммутируемый вход X1 второго мультиплексора сигналов нарастания 25б и т.д. При этом старший разряд k с его выхода аk поступает на первый коммутируемый вход X1 мультиплексора сигналов нарастания 25k.
Разряды второго двоичного числа К2, например 0,56 (в десятичном коде), с выходов б1 б2, … и бk второго задатчика числа 22б поступают аналогично на вторые коммутируемые входы Х2 мультиплексоров сигналов нарастания соответственно 25а, 25б, … и 25k. Разряды третьего двоичного числа К3, например 0,83 (в десятичном коде), с выходов в1 в2, … и вk третьего задатчика числа 22в поступают аналогично на третьи коммутируемые входы Х3 мультиплексоров сигналов нарастания соответственно 25а, 25б, … и 25k. Разряды четвертого двоичного числа К4, например 0,98 (в десятичном коде), с выходов м1 м2, … и мk четвертого задатчика числа 22г (в общем случае 22м) поступают аналогично на четвертые коммутируемые входы Х4 (Хм в общем случае) мультиплексоров сигналов нарастания соответственно 25а, 25б, … и 25k.
Таким образом, в соответствии с изменением двоичного числа (его разрядов d2 и d1) на управляемых входах соответственно А2 и А1 мультиплексоров сигналов нарастания 25а, 25б, … и 25k, на их на выходах формируется в двоичном параллельном коде k-разрядный сигнал нарастания, аналоговый вид которого приведен на эпюре "о" фиг.6, с периодом повторения, соответствующим 90°.
Кроме того, разряды четвертого двоичного числа К4, например 0,98 (в десятичном коде), с выходов м1 м2, … и мk четвертого задатчика числа 22г (в общем случае 22м) поступают на первые коммутируемые входы X1 мультиплексоров сигналов спада 26а, 26б, … и 26k. При этом младший разряд м1 двоичного числа К4 с первого выхода четвертого задатчика числа 22г (в общем случае 22м) поступает (в отличие от приведенного выше) на первый вход X1 первого мультиплексора сигналов спада 26а, а старший разряд мk поступает на первый коммутируемый вход X1 мультиплексора сигналов спада 26k.
Разряды третьего двоичного числа К3, например 0,83 (в десятичном коде), с выходов в1, в2, … и вk третьего задатчика числа 22в поступают на вторые коммутируемые входы Х2 мультиплексоров сигналов спада 26а, 26б, … и 26k. Разряды второго двоичного числа К2, например 0,56 (в десятичном коде), с выходов б1 б2, … и бk второго задатчика числа 22б поступают аналогично на третьи коммутируемые входы Х3 мультиплексоров сигналов спада 26а, 26б, … и 26k. Разряды первого двоичного числа К2, например 0,2 (в десятичном коде), с выходов а1 а2, … и аk первого задатчика числа 22а поступают аналогично на четвертые коммутируемые входы Х4 (Хм на фиг.5) мультиплексоров сигналов спада 26а, 26б, … и 26k.
Таким образом, в соответствии с изменением величины двоичного числа на управляющих входах А1 и А2 мультиплексоров сигналов спада 26а, 26б, … и 26k, на их выходах формируется в двоичном параллельном коде сигнал спада, аналоговый вид которого приведен на эпюре "р" фиг.6, с периодом повторения, соответствующего 90°.
Сигналы с выходов мультиплексоров формирования сигналов нарастания 25а, 25б, … и 25к поступают на входы переключения соответственно А1 А2, … и Аk первого переключателя сигналов 28а, на входы переключения соответственно В1 В2,.... и Вk которого поступают сигналы с выходов мультиплексоров сигналов спада 26а, 26б, … и 26k.
Сигналы с выходов мультиплексоров сигналов спада 26а, 26б, … и 26k поступают на входы переключения соответственно В1 В2,.... и Вk второго переключателя сигналов 28б, на входы переключения А1 А2,.... и Аk которого поступают сигналы с выходов мультиплексоров сигналов нарастания 25а, 25б, … и 25k.
Разряд d3 (в общем случае dn-1) двоичного числа (эпюра "в" на фиг.6) с выхода гироскопического измерителя угла крена 4 в параллельном виде, логические уровни которого приведены на эпюре "л" фиг.6, поступает на адресный вход управления переключением (соответствующий вход d3 синус-косинусного формирователя 5). Этот вход является входом логической схемы НЕ 27, а также вторыми входами управления переключениями соответственно формирователя синусоиды 23 и косинусоиды 24, т.е. входами В и А соответственно первого 28а и второго 28б переключателей сигналов.
Сигнал с выхода логической схемы НЕ 27 поступает на первые входы управлением переключениями соответственно формирователя синусоиды 23 и косинусоиды 24. При этом входы управления переключениями формирователей синусоиды 23 и косинусоиды 24 являются входами управления А и В, соответственно первого 28а и второго 28б переключателей сигналов.
На цифровых выходах формирователей синусоиды 23 и косинусоиды 24, являющимися соответственно выходами первого 28а и второго 28б переключателей сигналов, формируются соответствующие не полные (без знакового разряда) сигналы синуса и косинуса (эпюры "п" и "с" на фиг.6).
Как отмечалось ранее, на третий и четвертый входы преобразователя команд управления 2 также поступают логические уровни сигналов, являющихся знаковыми разрядами двоичных чисел синуса и косинуса. При этом старший разряд d4 (в общем случае dn) двоичного числа (эпюра "м" на фиг.6) с выхода гироскопического измерителя угла крена 4 является знаковым разрядом сигнала синуса. А сигнал с выхода логической схемы исключающее ИЛИ 6 является знаковым разрядом сигнала косинуса эпюра "н" на фиг.6). Причем знаковый разряд, имеющий логический ноль - число (сигнал), положительный, а логическую единицу - отрицательный. Таким образом, заявленное техническое решение:
1. Не содержит элементы, имеющие триггерные функции, например, счетчик импульсов, а значит при изменении величины двоичного числа исключен режим накопления ошибки при определении угла крена ракеты.
2. Преобразование команд осуществляют непосредственно по положению (наличию) каждого кренового импульса, при этом наличие импульсов помех малой длительности, например, из-за дрожания растра (границы раздела дорожек свет - тень), приводит к кратковременному изменению измеряемого угла крена ракеты на величину, не превышающую единицу младшего разряда.
3. Изменение направления вращения ракеты по углу крена даже в пределах одного оборота ракеты не оказывает влияния на работоспособность заявленного технического решения.
Следовательно, предлагаемая группа изобретений - способ формирования команд управления на ракете, вращающейся по углу крена, система управления ракетой, способ измерения угла крена на ракете, гироскопический измеритель угла крена системы управления ракетой, способ формирования синусного и косинусного сигналов на ракете, вращающейся по углу крена, для формирования команд управления на ней, и синус-косинусный формирователь системы управления ракетой - позволяет повысить эффективность формирования команд управления на ракете за счет обеспечения нечувствительности к изменению направления вращения ракеты по углу крена и повышения помехоустойчивости.
Группа изобретений относится к системам управления ракетами (СУР). Cпособ формирования команд управления включает измерение величины угла крена ракеты, формируемой в виде сигнала в n-разрядном коде Грея, который преобразуют в двоичное число, содержащее n-разрядов, логические уровни которого вырабатывают многоступенчатую аппроксимацию сигналов синусоиды и косинусоиды, и формируют из декодированных принимаемых сигналов команды управления ракетой соответственно по курсу и тангажу. СУР включает в себя гироскопический измеритель угла крена, логическую схему «исключающее ИЛИ», преобразователь команд управления и второй рулевой привод. Способ измерения угла крена включает формирование дополнительных последовательностей логических уровней,
формирующих число в n-разрядном коде Грея, которое преобразуют в двоичное n-разрядное число, соответствующее измеренной величине угла крена ракеты. В гироскопический измеритель угла крена дополнительно введены пары светодиод-фотодиод, размещенные на корпусе гироскопа и разделяемые растром. Способ включает формирование синусного и косинусного сигналов для формирования команд управления на ней, при котором двоичное число в параллельном виде формируют в виде n-разрядного. В СУР введён синус-косинусный формирователь М задатчиков чисел и логическая схема «НЕ». Повышается эффективность формирования команд управления СУР. 6 н. и 2 з.п. ф-лы, 6 ил.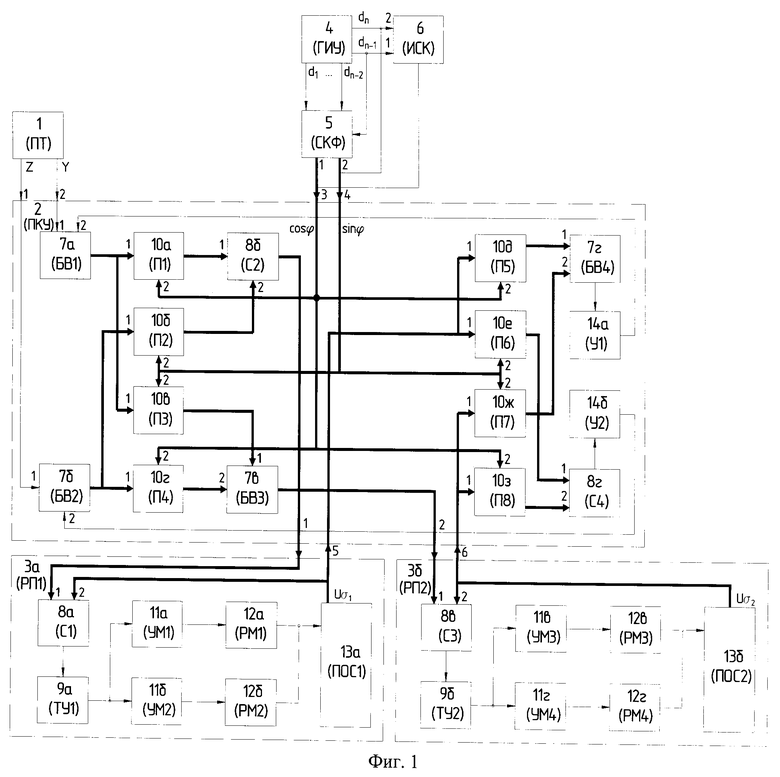
1. Способ формирования команд управления на ракете, вращающейся по углу крена, включающий декодирование принимаемых сигналов по курсу и тангажу, и формирование двоичного числа, соответствующего величине угла крена ракеты, отличающийся тем, что измеряют величину угла крена ракеты, формируемую в виде сигнала в n-разрядном коде Грея, который преобразуют в двоичное число, содержащее n-разрядов, логические уровни которого вырабатывают многоступенчатую аппроксимацию сигналов синусоиды и косинусоиды, формирующих из декодированных принимаемых сигналов команды управления ракетой соответственно по курсу и тангажу, при этом величину каждого дискретного значения в многоступенчатой аппроксимации сигналов синусоиды и косинусоиды образует соответствующая величина k-разрядного двоичного числа, а количество дискретных значений по углу в каждый период крена определяет величина n-разрядного двоичного числа, где n и k - заданные, требуемые количества разрядов в соответствующих двоичных числах.
2. Система управления ракетой, вращающейся по углу крена, содержащая приемный тракт, синус-косинусный формирователь и первый рулевой привод, отличающаяся тем, что она снабжена гироскопическим измерителем угла крена, логической схемой исключающее ИЛИ, преобразователем команд управления и вторым рулевым приводом, при этом курсовой и тангажные выходы приемного тракта соединены соответственно с первым и вторым входами преобразователя команд управления, адресные входы управления коммутациями синус-косинусного формирователя соединены с выходами соответственно d1,… и dn-2 гироскопического измерителя угла крена, выход dn-1 которого соединен с соответствующим адресным входом управления переключением синус-косинусного формирователя и первым входом логической схемы исключающее ИЛИ, второй вход которой соединен с выходом dn гироскопического измерителя угла крена, косинусный цифровой сигнал с первого выхода синус-косинусного формирователя и его знаковый разряд с выхода логической схемы исключающее ИЛИ соединены с третьим входом преобразователя команд управления, четвертый вход которого соединен с синусным цифровым сигналом со второго выхода синус-косинусного формирователя и его знаковым разрядом с выхода dn гироскопического измерителя угла крена, пятый и шестой входы преобразователя команд управления соединены с выходами соответственно первого и второго рулевых приводов, входы которых соединены соответственно с первым и вторым выходами преобразователя команд управления.
3. Способ измерения угла крена ракеты, вращающейся по углу крена, включающий формирование гироскопическим датчиком угла крена в каждый креновый период первой и второй последовательностей логических уровней, длительности которых равны угловому интервалу 180°, отличающийся тем, что формируют дополнительные последовательности логических уровней, начиная с третьей, в каждой из которых нулевые и единичные логические уровни имеют одинаковые длительности по угловой величине (φN), равные
φN=360°/2N-1,
где N=3, 4,… n - отсчеты дополнительных последовательностей логических уровней, при этом первую, вторую и дополнительные последовательности логических уровней образуют соответственно разряды qn, qn-1 и дополнительные qn-2,… и q1, формирующие число в n-разрядном коде Грея, причем во всех формируемых последовательностях логических уровней моменты переходов из нулевых уровней в единичные, ближайшие к величине угла крена ракеты, равной 0°, должны отставать по фазе от 0° на величину (ΔφN), равную
ΔφN =360°/2N,
где N=1, 2, 3,… n - отсчеты последовательностей логических уровней соответствующих qn, qn-1 qn-2,… и q1, которые преобразуют в двоичное n-разрядное число dn, dn-1 dn-2,… и d1, соответствующее измеренной величине угла крена ракеты.
4. Гироскопический измеритель угла крена системы управления ракетой, содержащий первую логическую схему исключающее ИЛИ и гироскопический датчик угла крена, включающий гироскоп, на оси внешней рамки которого закреплен непрозрачный растр с прозрачными по окружности участками, и две пары светодиод-фотодиод, разделяемые растром и размещенные на корпусе гироскопа, выходы фотодиодов из первой и второй пары соединены соответственно с первым и вторым нагрузочными резисторами, отличающийся тем, что он снабжен дополнительно третьей и четвертой парами светодиод-фотодиод, размещенными на корпусе гироскопа и разделяемые растром, четырьмя пороговыми устройствами, второй и третьей логическими схемами исключающее ИЛИ, при этом выходы первого, второго, третьего и четвертого фотодиодов из соответствующих пар соединены соответственно с первым, вторым, третьим и четвертым пороговыми устройствами, выходы третьего и четвертого фотодиодов соединены соответственно с третьим и четвертым нагрузочными резисторами, причем выходы второго, третьего и четвертого пороговых устройств соединены с первыми входами соответственно первой, второй и третьей логических схем исключающее ИЛИ, при этом выход первого порогового устройства и второй вход первой логической схемы исключающее ИЛИ являются выходом четвертого (старшего разряда) двоичного числа гироскопического измерителя угла крена системы управления ракетой, выходом третьего разряда двоичного числа которого являются выход первой логической схемы исключающее ИЛИ и второй вход второй логической схемы исключающее ИЛИ, выход второй логической схемы исключающее ИЛИ и второй вход третьей логической схемы исключающее ИЛИ являются выходом второго разряда двоичного числа гироскопического измерителя угла крена системы управления ракетой, первым выходным разрядом двоичного числа которого является выход третьей логической схемы исключающее ИЛИ.
5. Способ формирования синусного и косинусного сигналов на ракете, вращающейся по углу крена, для формирования команд управления на ней, включающий формирование двоичного числа в параллельном виде, изменяемого в угловом интервале крена ракеты 0°-360°, отличающийся тем, что двоичное число в параллельном виде формируют в виде n-разрядного, из которого выделяют 1,… и n-2 разряды, логические уровни которых в каждом квадранте углового интервала, начиная с 0°, выставляют соответствующие дискретные величины сигналов нарастания и спада, определяемые k-разрядным двоичным числом в параллельном виде, при этом логическими уровнями n-1 разряда двоичного числа и его инвертированными значениями формируют порядок чередования следования сигналов нарастания и спада, в результате которого вырабатывают дискретные цифровые величины синусоиды и косинусоиды, в качестве знаковых разрядов которых используют соответственно n-й разряд двоичного числа и этот же разряд, сдвинутый на 90°, при этом величина дискретов синусоиды и косинусоиды по углу крена равна 360°/n, а порядок их следования в каждом квадранте определяет значения дискретных амплитуд Км в соответствии с выражением
где М=1, 2,… 2n-2 - отсчеты дискретных значений в порядке их следования для сигналов нарастания и обратный отсчет для сигналов спада.
6. Синус-косинусный формирователь системы управления ракетой, содержащий формирователи синусоиды и косинусоиды, отличающийся тем, что он снабжен М задатчиками чисел и логической схемой НЕ, при этом выходы а1, а2,… и аk первого, б1, б2,… и бk второго, … и м1 м2,… и мk М-го задатчиков чисел соединены соответственно с входами коммутаций сигналов формирователей синусоиды и косинусоиды, выход логической схемы НЕ соединен с первыми входами управления переключениями формирователей соответственно синусоиды и косинусоиды, причем входы управления коммутациями формирователей синусоиды и косинусоиды являются адресными входами управления коммутациями d1… и dn-2 синус-косинусного формирователя системы управления ракетой, адресным входом управления переключением dn-1 которого являются вторые входы управления переключениями формирователей соответственно синусоиды и косинусоиды, а также вход логической схемы НЕ, цифровые выходы формирователей синусоиды и косинусоиды являются соответственно первым и вторым выходами синус-косинусного формирователя системы управления ракетой.
7. Синус-косинусный формирователь по п.6, отличающийся тем, что формирователь синусоиды выполнен в виде k мультиплексоров сигналов нарастания и первого переключателя сигналов, входы переключения А1, А2,… и Аk которого соединены с выходами соответственно первого, второго,… и k-го мультиплексоров сигналов нарастания, при этом первые а1, а2,… и аk, вторые б1, б2,… и бk,… и последние м1, м2,… и мk входы коммутаций сигналов из первого, второго, … и k-го мультиплексоров сигналов нарастания являются входами коммутаций формирователя синусоиды, входами управления коммутациями которого являются управляемые входы А1,… и Аn-2 первого, второго, … и k-го мультиплексоров сигналов нарастания, входы переключений В1, В2,… и Вk первого переключателя сигналов являются входами сигналов спада формирователя синусоиды, первый и второй входы управления переключениями которого являются соответственно входы управления А и В первого переключателя сигналов, а цифровым выходом формирователя синусоиды является цифровой выход первого переключателя сигналов.
8. Синус-косинусный формирователь по п.6, отличающийся тем, что формирователь косинусоиды выполнен в виде k мультиплексоров сигналов спада и второго переключателя сигналов, входы переключения В1 В2,… и Вk которого соединены с выходами соответственно первого, второго,... и k-го мультиплексоров сигналов спада, при этом первые м1 м2,… и мк, предпоследние б1, б2,… и бk и последние а1, а2,… и аk входы коммутаций из первого, второго … и k-го мультиплексоров сигналов спада являются входами коммутаций формирователя косинусоиды, входами управления коммутациями которого являются управляемые входы А1,… и Аn-2 первого, второго, … и k-го мультиплексоров сигналов спада, входы переключений А1, А2,… и Аk второго переключателя сигналов являются входами сигналов нарастания формирователя косинусоиды, первый и второй входы управления переключениями которого являются соответственно входы управления В и А второго переключателя сигналов, а цифровым выходом формирователя косинусоиды является цифровой выход второго переключателя сигналов.

